
Component Ensemble-based UML/MARTE Extensions for the Design of
Dynamic Cyber-Physical Systems
Nissaf Fredj
1
, Yessine Hadj Kacem
1
, Olfa Kanoun
2
and Mohamed Abid
1
1
CES Laboratory, ENIS, University of Sfax, Tunisia
2
Chair of Measurement and Sensor Technology, Chemnitz University of Technology, Germany
Keywords:
Open-ended CPS, MARTE, Component Ensemble, Closed-loop.
Abstract:
Cyber-Physical Systems (CPS) are open-ended distributed systems which incorporate autonomous compo-
nents that interact with clear responsibilities to fulfill a defined objective. They are subject to several issues
related to the interaction between components and dynamic behavior of their status as well as real-time con-
straints. Their design requires effective modeling formalisms for functional verification and real-time analysis
of CPS at early stages of development. Unified Modeling languages and especially the Modeling Analysis
of Real-Time and Embedded systems (MARTE) profile fail to capture the dynamics of CPS. They focus on
individual components and are unable to provide such QoS guarantees. Moreover, they again assume static
component architectures, which effectively hinder their direct application in open-ended systems. In this re-
spect, we proposed to extend MARTE profile with the concept of ensemble semantics for the design of a
dynamic grouping of CPS components. The objective is to save resources consumption such as battery life
and allow for scalable QoS guaranties. Moreover, the present approach proposes designs patterns for the spec-
ification of CPS closed-loop concerns which addresses the components composition, adaptation as well as the
verification of system constraints.
1 INTRODUCTION
Cyber-physical systems consist of a large number of
devices that monitor and react to their environment
and interact with each other through input-output in-
terfaces. They are complex and subject to numerous
constraints due to their environment mobility and re-
sources fluctuation (Bradai et al., 2020). As a result,
there is a necessity to evaluate system output qual-
ity at an early stage of development to obtain reli-
able systems which permit an efficient and fast re-
action to the environment fluctuations. Lightening
the task of CPS designers and raising the abstraction
level have become prominent solutions to cope with
their complexity and avoid executions problems. To
do so, several research studies tried to exploit mainly
the modeling languages such as the UML/MARTE
profile and component-based methods to specify and
develop open-ended dynamic CPS. However, stan-
dard techniques (Fredj et al., 2020) do not address
the dynamic and cooperative aspects of CPS compo-
nents. Such works which deal with high-level specifi-
cations of adaptation of real-time and embedded sys-
tems (FREDJ et al., 2018), do not support the interac-
tion between dynamic components which is essential
in open-ended applications. On the other hand, com-
ponent ensemble-based works (Masrur et al., 2017)
(Crnkovic et al., 2011), which allow modeling large-
scale dynamic systems by a set of interacting compo-
nents, do not provide a basis for specifying the adap-
tation and runtime requirements. Besides, they fail to
capture the dynamic CPS at a high-level of abstrac-
tion and provide reusable and generic solutions. To
address the above issues, we propose an extension in
MARTE profile to support the concepts of component
ensemble which are required to specify the interaction
between dynamic components of CPS. This innova-
tive extension enhance MARTE profile to support the
design of dynamic open-ended CPS at a high-level
of abstraction. Moreover, the present work aims at
specifying the closed-loop concerns for dynamic sys-
tems based on proposed design patterns as generic
and reusable solutions to enhance the separation of
concerns and improve system modularity. The pro-
posed patterns cope with the composition between
components, monitoring and adaptation logic which
are responsible for specifying dynamic open-ended
CPS.
The present proposal is evaluated through an Intelli-
gent Crossroad System (ICS). Section 2 surveys the
related works about the high-level design and compo-
nent ensemble-based approaches for the specification
158
Fredj, N., Kacem, Y., Kanoun, O. and Abid, M.
Component Ensemble-based UML/MARTE Extensions for the Design of Dynamic Cyber-Physical Systems.
DOI: 10.5220/0010546401580166
In Proceedings of the 16th International Conference on Software Technologies (ICSOFT 2021), pages 158-166
ISBN: 978-989-758-523-4
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of dynamic open-ended CPS and the evaluation of
system performance. Section 3 presents the proposed
extensions and the closed-loop patterns. In section
4, an illustration of the proposal through the ICS ex-
ample is described. Finally, section 5 concludes this
work.
2 RELATED WORKS
We classify the state-of-the-art studies about the high-
level methods, which emerged in the context of dy-
namic Cyber Physical Systems (CPS) design. In par-
ticular, we discuss their support for cooperative and
adaptive architecture as well as real-time analysis.
2.1 Component Ensemble-based
Approaches for Developing
Dynamic Open-ended Systems
Most of works in (Bures et al., 2013) (Crnkovic et al.,
2011) were built based on the concept of compo-
nent ensemble. They define an ensemble as the se-
mantic interaction between components and consti-
tute their composition. The DEECo (Crnkovic et al.,
2011) framework allows modeling closed-loop-based
dynamic systems and provides mechanisms to de-
scribe interactions between them. The components
dynamically join an ensemble at runtime, which de-
scribes the components on the basis of their roles, as
one component has a coordinator role and other are
members. They consist of knowledge which reflects
its current state and have a set of processes that ma-
nipulate their knowledge. Then, the dynamic interac-
tion between the coordinator and members consists
in exchanging attribute values according to knowl-
edge description. Thereby, the work of (Masrur et al.,
2017) proposed a design methodology based on the
concept of ensemble and focus on the autonomous be-
havior, adaptation and components collaboration. In
fact, they extended the DEECO framework (Crnkovic
et al., 2011) to guarantee real-time behavior and con-
straints analysis. Previous works (Crnkovic et al.,
2011) (Bures et al., 2013) (Masrur et al., 2017) have
allowed reasoning about real-time requirements and
provided deterministic semantics for real-time anal-
ysis and distributed collaboration of CPS. However,
they present a set of challenges. First, DEECO closed
loop concerns are either mixed with the system func-
tional logic, thus add complexity to the knowledge
adaptation process and lucks reusability. Besides, the
adaptation of components knowledge and real-time
analysis were supported at a low-level and dependent
on the target system. Finally, previous component-
based designs methods have failed to capture the dy-
namic CPS at a high-level of abstraction. They do
not provide reusable and generic solutions which are
independent from any system. Therefore, developing
such complex systems using approaches that handle
technical details at low-level, is no more an efficient
solution.
2.2 High-level-based Approaches for the
Design of Dynamic Real-time
Systems
Recently, there is a clear trend to use high-level mod-
els for the design and development of complex dy-
namics systems. Several research studies adopted
the system abstraction as an optimal way to improve
adaptive and distributed systems design (Beux, 2007)
by using model-based methods and UML profiles.
An UML extension has been implemented in the
form of MAFRTE profile, which is often the most
adapted to the design of real-time and embedded sys-
tems (Fredj et al., 2020). A model-based process
for dynamic reconfiguration in distributed real-time
systems was proposed in (Krichen et al., ). The so-
lution is based on a non-predefined set of configu-
rations specified by new extensions in MARTE and
meta-models. The dynamic reconfigurable system is
modeled by a set of modes each of which is associ-
ated with a configuration described by a set of com-
ponents and connections between them. In (Corsaro
et al., 2002), the author proposed a virtual compo-
nent pattern, which permits the adaptation of a dis-
tributed application to the embedded systems’ mem-
ory constraints. The work in (IGLESIA and WEYNS,
2015) proposed a formal specification-based template
of distributed self-adaptive mobile learning applica-
tion which makes the system robust to the GPS ac-
curacy degrading. The self-adaptation is based on a
MAPE (Monitor, Analyzer, Planner, and Executer)
control loop for distributed mobile applications. The
weakness of this work is that the verification tem-
plate is specific to the functionality of the proposed
use case. In (Arcaini et al., 2015), the authors pre-
sented a framework to formally model and verify the
distributed self-adaptive systems using the concept of
multi-agent ASM (Abstract State Machines). Their
work supports techniques for the validation and veri-
fication of adaptation scenarios, as well as the correct-
ness of the adaptation logic. The authors in (FREDJ
et al., 2018) proposed an extension in MARTE pro-
file to design the runtime behavior of adaptive real-
time systems. It offers a well-structured support to
extend the UML/MARTE profile with runtime and
Component Ensemble-based UML/MARTE Extensions for the Design of Dynamic Cyber-Physical Systems
159

reconfiguration semantics and nonfunctional proper-
ties. This work was extended in (Fredj et al., 2020)
where the proposed extensions were integrated in a
model-based development process for the analysis of
adaptive real-time system behavior and system con-
straints (energy consumption and task deadlines). Un-
fortunately, MARTE extensions-based works (FREDJ
et al., 2018) (Fredj et al., 2020) assume closed compo-
nent architectures, which effectively prevent their ap-
plication in case of dynamic CPS development. Fur-
thermore, previous works fail to target open-ended
CPS requirements where components interact one an-
other and their architecture changes continuously at
runtime.
We derived from the state-of-the-art studies the weak-
ness of the existing methods for the design and the
analysis of dynamic cyber-physical systems. Most
of studied approaches (Crnkovic et al., 2011) (Mas-
rur et al., 2017) proposed component-based solu-
tions to address cyber-physical applications require-
ments and support dynamic interaction between com-
ponents. These solutions are not abstract enough and
fail to address adaptation and communication require-
ments as well as real-time analysis at an abstract level
for an early verification of the system. In this respect,
the approaches of (FREDJ et al., 2018) (Arcaini et al.,
2015) (IGLESIA and WEYNS, 2015) (Fredj et al.,
2020) provided promising solutions to raise the ab-
straction level and cope with the complexity of low-
level adaptation tools. Unfortunately, they proposed
solutions which largely fail to address the require-
ments of distributed adaptive systems. This is mostly
because they are unable to model an open-ended sys-
tem, in which cooperative components interact with
one another to adapt to the current state of its envi-
ronment.
3 OUR PROPOSAL
We derived from the state-of-the-art studies the weak-
ness of the existing methods and tools for the design
and the analysis of dynamic cyber-physical systems.
They do not operate at a high-level of abstraction and
provide sufficient means to model interracting com-
ponents behavior, adaptation logic, and real-time con-
straints. To address the above issue, we propose to ex-
tend MARTE profile by the concepts of ensemble to
support the interaction between system components
and allow reasoning about dynamic systems behavior
and runtime semantic of CPS. Moreover, we propose
two design patterns as generic and reusable solutions
for the specification of DEECO closed-loop concerns
for the interaction between dynamic components of
CPS. This helps to separate both the adaptation logic
and components composition features from functional
system logic. The first design pattern focuses on mon-
itoring of components adaptation changes. The sec-
ond pattern describes the composition between com-
ponents based on the concept of ensemble. and the as-
sessment of closed-loop parameters (such as ensem-
ble evaluation and computation delays) based on a set
of metrics. The patterns are independent from target
low-level tools to enhance the separation of concerns
and improve system modularity. More precisely, they
focused on the adaptation behavior and interaction of
systems components as well as the analysis of real-
time constrains.
In what follows, we will present the proposed exten-
sions in MARTE profile for designing dynamic and
adaptive CPS. Afterwards, we will introduce the spec-
ification of the closed-loop based design patterns. Fi-
nally, we will illustrate the proposed extensions and
closed-loop patterns through ICS case study.
3.1 Component Ensemble Extensions in
MARTE Profile for the Design of
CPS
The proposed extension was introduced as a
new package which extends the Software Re-
source Modeling (SRM) package of MARTE and
uses stereotypes from the MARTE:RuntimeContext,
MARTE:Timed Element, Causality package and
MARTE:Communication package. More precisely,
we need four sub-profiles of MARTE. First, since we
are interested in cyber-physical systems composed of
adaptive components which are managed by real-time
tasks named process, we use concepts from the SRM
(Software Resource Modeling) package of MARTE.
SRM is a specialization of the Generic Resource
Modeling (GRM) package to describe the structure
of the system which is composed of software multi-
tasking. Second, in order to follow the system behav-
ior changes at runtime, we need a behavioral mod-
eling and runtime semantics concepts provided re-
spectively by the CommonBehavior as well as the
RuntimeContext sub-packages. Finally, we need to
use the timing concepts offered by the TimedElement
package to define the components resource execu-
tion period. In addition, we use some concepts from
Communication package to support requests between
adaptive components.
Figure 1 illustrates the proposed package, in which
we have distinguished the standard stereotypes of
MARTE from the proposed ones by the green color.
Ensemble stereotype:
It inherits implementation and attributes of RtUnit
ICSOFT 2021 - 16th International Conference on Software Technologies
160
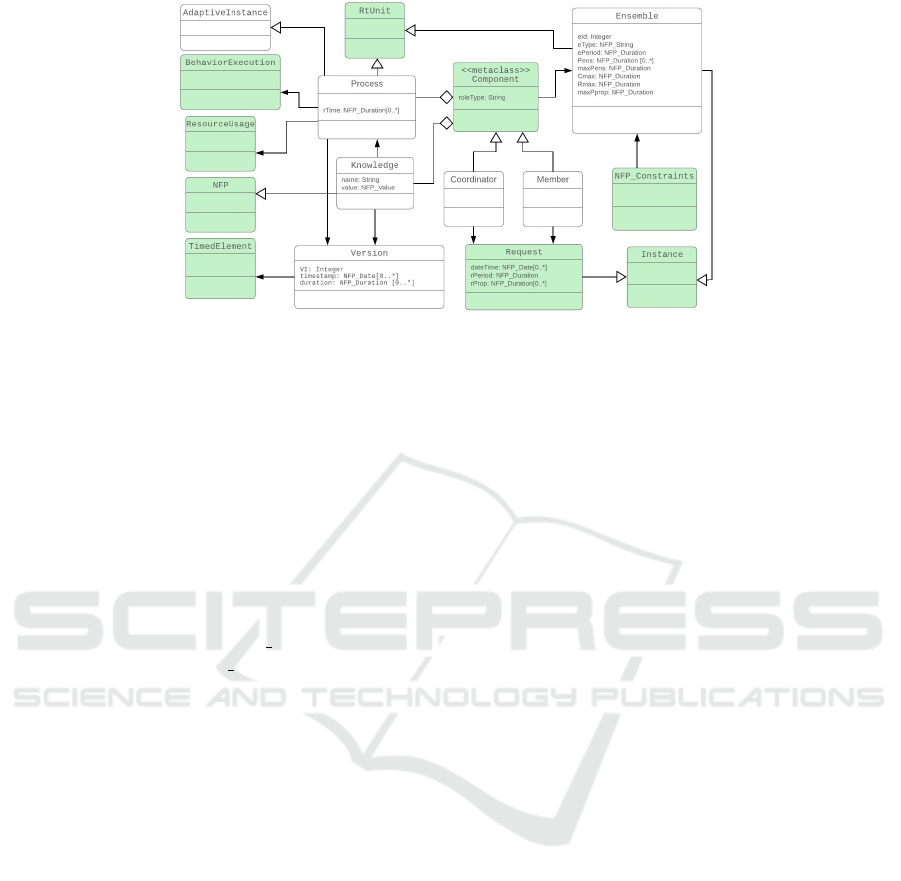
Figure 1: Component ensemble-based extensions in UML/MARTE profile.
from HLAM sub-package of MARTE. RtUnit stereo-
type specifies active and schedulable resources.
• Generalization: 1) MARTE::RtUnit. 2)
MARTE::Instance stereotype: A system can
establish a set of ensemble instances at runtime.
Thus, the Ensemble stereotype inherits from the
MARTE::Instance stereotype which specifies
runtime instances.
• Associations: 1) UML Component meta-class:
Ensemble is a composition of system components
thus, it is associated to the UML Component
meta-class. 2) MARTE::NFP Constraint: Ensem-
ble is associated to NFP Constraint stereotype of
MARTE that is a boolean condition to determine
whether two components should form an ensem-
ble.
• Attributes: 1) eId: identify the ensemble. 2) ePe-
riod: period of an ensemble 3) eType: type of en-
semble. 4) Pens: delay of ensemble instance eval-
uation. 5) maxPens: max delay of an ensemble in-
stance evaluation. 6) Cmax: sum of computation
delay of all processes in an ensemble. 7) Rmax:
sum of reaction time delay of all processes in an
ensemble. 8) maxPprop: max delay of knowledge
propagation in an ensemble.
• Semantics: An ensemble defines a semantic con-
nector between components and constitutes their
composition. It can be considered as real-time
task which is externalized from the component it-
self.
Coordinator Member stereotypes: They
inherit the implementation and attributes of
UML::Component meta-class.
• Generalization: UML::Component meta-class
• Associations: Request: communication between
coordinator and member is based on a set of re-
quests. Thus Coordinator and Member
stereotypes are associated to the Request stereo-
type of MARTE::Communication package.
• Semantics: When specifying an ensemble,
prospective components are described by roles.
One component in the ensemble has a coordina-
tor role, whereas the remaining components are
members of the ensemble.
Knowledge stereotypes: It inherits the attribut
of MARTE::NFP stereotype.
• Generalization: MARTE::NFP
• Associations: 1) UML::Component: System
component is specified by a set of knowledge.
2) Version stereotype: Each knowledge has a
set of versions which should be tracked and
stored for future adaptation decisions. Knowl-
edge stereotype is associated to Version stereo-
type which was proposed in (FREDJ et al., 2018).
A Version stereotype has a VI (version iden-
tifier) attribute and timestamp and duration at-
tributes which have a multiplicity of [0..*]. Ver-
sion stereotype is associated with the TimedDu-
rationObservation and TimedInstantObservation
stereotypes of TimedElement package to define
the lifetime and instant of each version respec-
tively (FREDJ et al., 2018).
• Semantics: Knowledge is measurable data that
characterize components. It is a state variable that
may change their values at runtime. Knowledge
can be a QoS attribute or an NFP property (such as
CPU utilization, memory usage, power consump-
tion, network bandwidth).
Process Stereotype: It inherits the implementa-
tion and attributes of RtUnit stereotype, which spec-
ifies active and schedulable objects (resources). Pro-
cess is an adaptive object that inherits from Adaptive-
Instance stereotype. The latter was defined in (FREDJ
Component Ensemble-based UML/MARTE Extensions for the Design of Dynamic Cyber-Physical Systems
161

et al., 2018) to extend MARTE profile for supporting
the specification of adaptive resource at runtime.
• Generalization: 1) MARTE::RtUnit. 2)
MARTE::AdaptiveInstance.
• Associations: 1) MARTE::ResourceUsage:
Process stereotype is associated to the Re-
sourceUsage stereotype of MARTE which
define the amount of consumed resource. 2)
Knowledge: Knowledge values represent in-
puts to process. 3) UML::Component: System
component is composed of a set of process. 4)
MARTE::BehaviorExecution: Processes have
runtime behaviors specified by the BehaviorEx-
ecution stereotype of MARTE::RuntimeContext
package.
• Attributes: 1) WCRT: worst case response time of
a process. 2) rTime: response time of a process.
• Semantics: Process is a real-time and adaptive
unit, which responsible to manage component
knowledge values.
Request Stereotype: It inherits implementa-
tion and attributes of MARTE::Instance stereotype of
MARTE.
• Generalization: MARTE:: Instance
• Associations: 1) Coordinator: Coordinator com-
ponent sends request to members. 2) Member:
Member component receives request from coor-
dinator.
• Attributes: 1) dateTime: timestamp of a request
instance. 2) rPeriod: period of a request. 3) rProp:
delay of a request instance propagation.
• Semantics: Request is a standard stereotype of
MARTE which represents an instance of com-
munication and specifies data that are passed be-
tween coordinator and member. We define new
attribute rProp with [0..*] multiplicities to denote
that a request may has several instances in a pe-
riod of time, each of which has a propagation time
(rProp) value.
The system modeling based mainly on the proposed
extensions have to go through a model-based devel-
opment process for the automatic generation of the
dynamic CPS from a high-level specification as well
as the evaluation of the real-time constraints.
3.2 Design Patterns for the Specification
of DEECo Closed-loop
The second contributions of this work is to separately
specify the behavior of closed-loop using design pat-
terns. In fact, it should be noted that for most of ex-
isting approaches, the adaptation logic as well as the
components membership evaluation are either mixed
with the system functional logic. To overcome this
problem, we propose two design patterns which in-
teract one another to perform a component ensemble
evaluation and knowledge changes monitoring and
adaptation.
3.2.1 Ensemble Evaluator Pattern
The Ensemble evaluator pattern is based on the con-
cept of ensemble. It constitutes a generic solution that
can be applied to any distributed dynamic system. In
fact, it is required to determine whether two compo-
nents (a coordinator and a member) should form an
ensemble. This pattern is responsible for checking the
membership condition between components which is
expressed as a logic predicate formulated upon coor-
dinators and member’s knowledge. The exchanging
of attribute values between coordinator and member
is performed according to the description given in the
knowledge exchange specification. Additionally, this
pattern evaluates the closed-loop performance (en-
semble evaluation delay, reaction time and propaga-
tion time) each unit of time by calculating metrics.
The description of the proposed pattern follows the
template in (Buschmann et al., 1996) which presents
a set of rubrics to describe a design pattern such as
problem, context, intent, and solution.
• Problem: Evaluator pattern deals with the issue
of distributed systems components composition
and the issue of closed-loop cost-effectiveness. It
treats the question of with whom to interact and
how well interact do.
• Context: This pattern is used when there is a need
of components composition to exchange knowl-
edge between distributed systems components.
• Intent: This pattern is responsible for checking the
membership condition between two components
to form an ensemble of and to evaluate the closed-
loop performance.
• Solution
Structural view: The structural view of a design
pattern is represented by a class diagram in Fig-
ure 2 which contains: 1) Evaluator class repre-
sents a real-time task, which identifies compo-
nents roles and evaluate their relationship based
on a logical condition. It takes as input compo-
nent knowledge attributes values and generates as
output an ensemble exchange description. Evalu-
ator class is annotated by the Ensemble stereotype
from the proposed package in Figure 1. It assesses
closed-loop performance and adjusts such con-
trol parameters to ameliorate the closed-loop cost-
effectiveness. 2) ControlParameter represents a
ICSOFT 2021 - 16th International Conference on Software Technologies
162
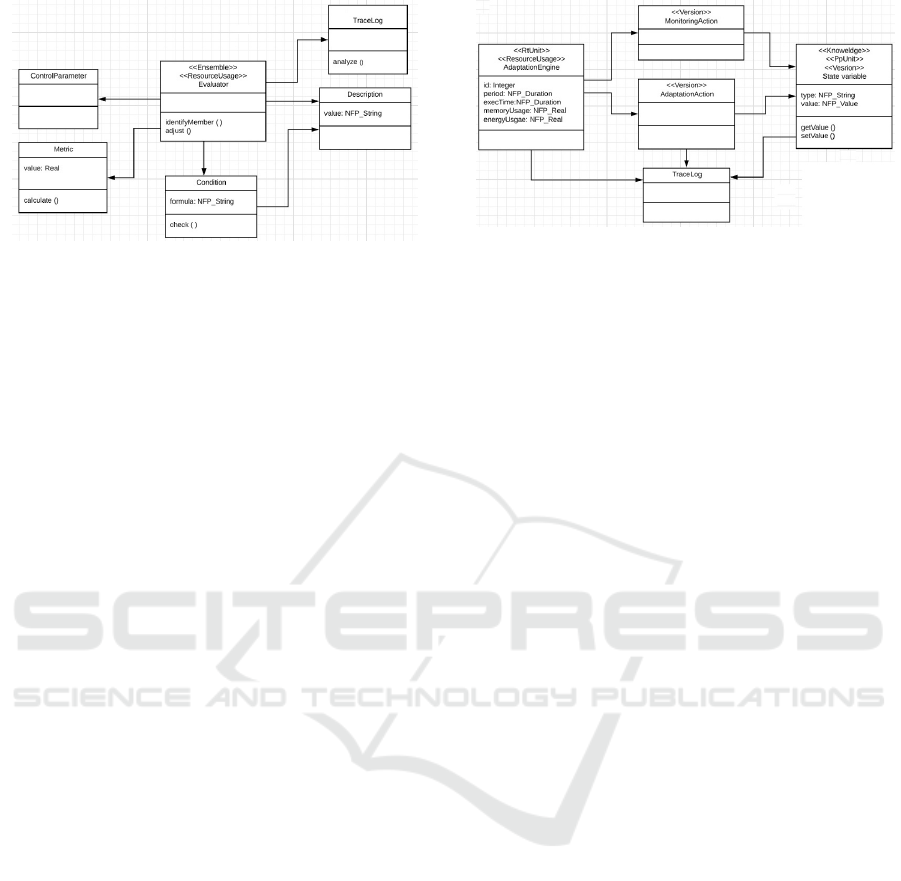
Figure 2: Ensemble pattern structure.
closed-loop parameter which can be adjusted to
new context variations. For instance, it can be
the ensemble evaluation period or thresholds. 3)
Condition class represents a logical expression to
check membership between components. Con-
dition satisfaction is managed by evaluator. 4)
Description class represents the specification of
knowledge attributes exchange which is generated
after membership condition checking. 5) Metric
class specifies measurement which are established
by Evaluator to assess closed-loop performance.
6) TraceLog is a repository that serves to store
knowledge values changes and ensemble evalua-
tion metrics Stored data are represented by traces.
Each trace is associated with a version identifier
and has a specific value at a specific timestamp.
Behavioral view: A behavioral view illustrates
the pattern behavior through the invocations of
methods between objetcs. The Evaluator starts
by checking the membership condition (method
check ()) satisfaction. Once condition is cheeked,
Evaluator recovers the Boolean value. If the mem-
bership condition is satisfied, Evaluator identi-
fies the role of the considered component as a
member. These steps are repeated each unit of
time during ensemble period (ePeriod). The Eval-
uator calculates close-loop performance metrics
(methods calculate ()) and analyzes the history
(TraceLog) to make statistics. Building on these
calculations, and via its adjust () method, it gen-
erate a decision to adjust the closed-loop perfor-
mance by acting on some ControlParameters.
3.2.2 Adaptation Pattern
In the present work, the specification of adaptation
logic is performed using design pattern as generic so-
lution to increase the productivity and reusability.
• Problem: The adaptation pattern deals with the is-
sue of dynamic adaptation as a reccurent problem
(IGLESIA and WEYNS, 2015). It treats the ques-
tion of what and how to adapt?
Figure 3: Adaptation pattern structure.
• Context: This pattern is used when a state variable
is changed and attached to an adaptive process.
• Intent: This pattern is responsible for monitoring
and adaptation of the component knowledge val-
ues and storing adaptation traces in the history.
• Solution
Structural view : The static view of adaptation
pattern is illustrated in Figure 3 which contains:
1) AdaptationEngine class represents a real-time
unit that observes the state variable status and de-
cides if a variation has occurred or a threshold
(Threshold class) has been exceeded. It adapts
state variable values in order to meet system con-
straints. It is specified by the RtUnit and Re-
sourceUsage stereotypes of MARTE. 2) State-
Variable class represents component knowledge
that may change their values under different in-
stants. Thus, they are annotated by the proposed
Version stereotype. Thanks to VI attribute of Ver-
sion stereotype, designers are able to load the
required version from the history. 3) Change-
ableElement class represents the component that
has to be adapted. 4) AdaptationAction class rep-
resents adaptation actions which are applied by
the adaptation engine to the changeable element
in the system. 5) The TraceLog is a repository of
adaptation decisions previously generated by the
adaptation engine. It may serve to store the state
variables changes which are represented by traces.
Behavioral view: The monitoring action begins
with sensors which periodically conveys a new status
measure of the supervised state variable then it noti-
fies the adaptation engine. The AdaptationEngine re-
ceives the new measure and updates the state variable
with the new status value and stores old value in the
history (TraceLog). Afterwards, it inspects the new
status to decide about the change relevance. It can use
thresholds to prove whether the measure is in the in-
terval delimited by min and max values. The negative
case indicates an irregular state causing the Adapta-
tionEngine to generate an adaptation action and up-
date the changeable element.
Component Ensemble-based UML/MARTE Extensions for the Design of Dynamic Cyber-Physical Systems
163

4 ICS EXAMPLE ILLUSTRATION
In order to illustrate the proposed extensions, we rely
on an Intelligent Crossroad System (ICS). More pre-
cisely, the illustration focuses on the specification of
input model of the considered system based on the
proposed extensions and the closed-loop patterns. In
fact, the architecture of the ICS system is composed
of two components/nodes which are the car and the
ICS. Vehicles arrive and leave the intersection region
where their priorities changes at different instants ac-
cording to their distances to the center of the inter-
section. Each node is occupied by a processing unit.
The system enables to concurrently run different real-
time tasks or process. A process can be executed in
response to a timer event or as a reaction to a change
in one of its attributes.
4.0.1 ICS System Modeling
Figure 4 illustrates the class diagram of ICS system
model. It is composed of two classes Car and ICS
to specify the car and ICS nodes respectively. Car
and ICS classes are annotated by Member and Coor-
dinator stereotypes, respectively, from the proposed
package in Figure 1. Car component is character-
ized by a set of knowledge; speed, mode, distance
which represent the speed of car, assignment speed
mode and distance from the crosscutting, respectively
and the time of the last speed update, which must
be less than a threshold. Each attribute is annotated
by the knowledge stereotype from the proposed pack-
age. Car component runs three process which are the
monitorSpeed, updateSpeed and calculateSpeed. The
monitor process focus on monitoring whether the time
of the last speed update must be lower than a thresh-
old. The calculate process is responsible for comput-
ing the speeds of potential cars depending on the cur-
rent traffic situation and the time at which they can
reach the intersection. The update process adjusts the
cars speeds to avoid conflicts.
Figure 4: ICS system model.
Component/node processes are annotated by Pro-
cess stereotype. They are executed in process-
ing unit which is specified by Processor class
and annotated by MARTE::HwProcessor stereo-
type. Battery and Memory classes are annotated
by MARTE::HwSupport and MARTE::HwMemory
stereotypes, respectively.
4.0.2 Closed-loop Patterns Application to the
ICS Example
Ensemble pattern starts by checking ensemble condi-
tion which must be evaluated to true at both the ICS
and the car nodes, separately. This checking requires
knowledge values input data such as car speed, dis-
tance and current mode. Thus, ensemble pattern is
integrated in the ICS input model of Figure 4 by two
associations between its Evaluator class (see Figure
2) and Car and ICS classes of ICS model (see Fig-
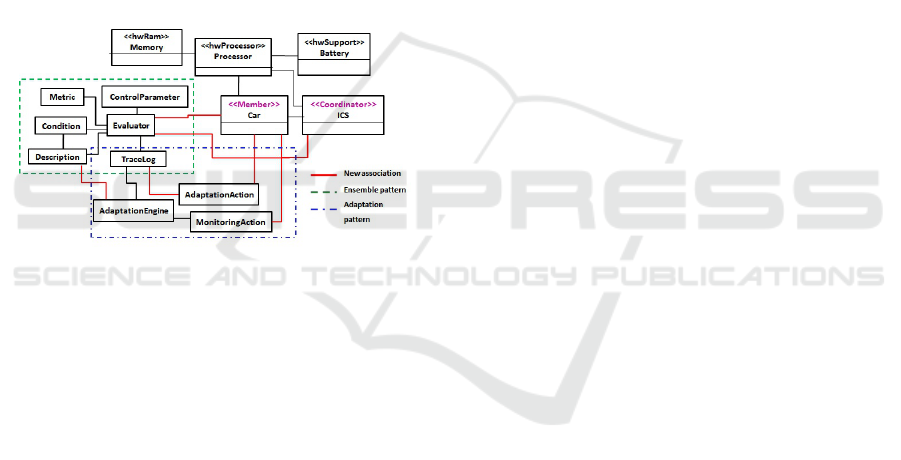
ure 4). The integration of the closed loop patterns
in the ICS model is illustrated in the resulting model
of Figure 5. The Evaluator is responsible for check-
ing whether input data is obsolete, if not it stores new
values in the history (TraceLog class). We assume
that membership condition is related to the distance
of car to the crosscutting which must be lower than
60 m. If the condition is validated, Evaluator identi-
fies cars which satisfy the condition, as members to
dynamically join the ensemble. Then, Evaluator gen-
erates as output knowledge description which needs
to be exchanged from the car to the ICS and from ICS
to car. Once data are received by the car component,
Evaluator establishes a set of metrics to determinate
the Pens at this timestamp and compares it to max-
Pens. The adaptation of car speed is separately man-
aged by the proposed adaptation pattern depending on
the description generated by ensemble pattern. Thus,
ensemble and adaptation patterns are combined to-
gether by adding a new association between Descrip-
tion class of ensemble pattern and AdaptationEngine
class of adaptation pattern (see Figure 2 and Figure
3). In fact, car speeds represent the state variable
which are captured and monitored using monitoring
actions (MonitoringAction Class) of the adaptation
pattern. Thus, an association between the Car class
of the ICS model and the MonitoringAction class of
the adaptation pattern is established (see Figure 5).
Afterwards, the adaptation engine examines the col-
lected values and generates adaptation actions which
are applied to the changeable element represented by
the updateSpeed() process. Thus, the adaptation pat-
tern is combined with the ICS model by a new as-
sociation between its AdaptationAction class and the
changeable element represented by the updateSpeed
process of the Car class (see Figure 5). Adapta-
tion actions are stored each timestamp in the history
ICSOFT 2021 - 16th International Conference on Software Technologies
164
(TaceLog) for future adaptation decision. Once the
speed adaptation is performed, the ensemble pattern is
invoked to recover the updateSpeed process reaction
time. Then, Evaluator performs a set of metrics to as-
sess the closed-loop delay which is computed based
on Pens and rProp values. In fact, once a membership
evaluation is performed at the ICS, a car propagates
its knowledge to the ICS immediately and the data is
received at the ICS Pens time later. The knowledge
is propagated with a rProp delay from the car to the
ICS. Similarly, the ICS propagates its knowledge to
the corresponding car just after a membership eval-
uation is performed and data is received Pens time
later at the car. The ICS’s knowledge is propagated
to the car rProp time later. The attributes rProp and
Pens are from Request and Ensemble stereotypes 1,
respectively, denote the knowledge propagation and
the ensemble evaluation period of a node i in the ICS
system.
Figure 5: Application of Closed loop patterns to ICS sys-
tem.
5 CONCLUSION AND
DISCUSSION
The use of high-level methods for the specification
and the analysis of cyber-physical systems provide
advantages upon low-level development. It consists
in raising the level of abstraction to describe coop-
erative dynamic components systems. Almost exist-
ing approaches do not support the high-level design
for monitoring, adaptation and real-time analysis con-
cerns. They do not operate at an abstract level and
do not support the traceability of dynamic compo-
nents versions during execution. To overcome these
issues, we defined a new component ensemble-based
UML/MARTE package to support the dynamic inter-
action between distributed components and to specify
CPS and real-time constraints. Additionally, we have
proposed design patterns for specifying closed-loop
features. In fact, a pattern view screens out specific
details and makes it possible to describe and conceive
solutions independently from any system. It offers the
advantage of concerns separation to reduce execution
problems.
As future works, we plan to integrate the present
UML/MARTE extensions and proposed patterns into
a complete model driven-based approach for the anal-
ysis of distributed systems.
REFERENCES
Arcaini, P., Riccobene, E., and Scandurra, P. (2015). Mod-
eling and analyzing mape-k feedback loops for self
adaptation. International Symposium on Software En-
gineering for Adaptive and Self Managing Systems,
SEAMS15, IEEE, Piscataway, NJ, USA, page 13–23.
Beux, S. L. (2007). Un flot de conception pour applications
de traitement du signal systematique implementees
sur fpga a base d ingenierie dirigee par les modeles.
Universite des Sciences et Technologie de Lille.
Bradai, S., Bouattour, G., Naifar, S., and Kanoun, O.
(2020). Electromagnetic energy harvester for battery-
free iot solutions. IEEE World Forum on Internet of
Things (WF-IoT).
Bures, T., Nicola, R. D., Gerostathopoulos, I., Hoch, N.,
Kit, M., Koch, N., Monreale, G. V., Montanari, U.,
Pugliese, R., Serbedzija, N., Wirsing, M., and Zam-
bonelli, F. (2013). A life cycle for the develop-
ment of autonomic systems: The e mobility show-
case. 2013 IEEE 7th International Conference on Self-
Adaptation and Self-Organizing Systems Workshops,
pages 359–381.
Buschmann, F., Meunier, R., Rohnert, H., Sommerlad, P.,
and Stal, M. (1996). Pattern Oriented Software Archi-
tecture.
Corsaro, A., Schmidt, D. C., Klefstad, R., and ORyan,
C. (2002). Virtual component - a design pattern for
memory-constrained embedded applications. In in
Proceedings of the Ninth Conference on Pattern Lan-
guage of Programs (PLoP.
Crnkovic, I., Sentilles, S., Vulgarakis, A., and Chaudron,
M. R. (2011). A classification framework for software
component models. IEEE Transaction. Software. En-
gineering. volume 37(5), pages 593–615.
Fredj, N., Kacem, Y. H., , and Abid, M. (Dec 2018). Run-
time uml marte extensions for the design of adaptive
rte systems. International Conference on Intelligent
Systems Design and Applications (ISDA),2018, Vel-
lore India.
Fredj, N., Kacem, Y. H., and Abid, M. (2020). Runtime
model-based framework for specifying and verifying
adaptive rte systems. International Journal of Com-
puter Applications Technologies.
Iglesia, D. G. D. L. and Weyns, D. (2015). Mape-k formal
templates to rigorously design behaviors for self adap-
tive systems. ACM Transactions on Autonomous and
Adaptive Systems, Volume 10, Issue 3, pages 1–15.
Krichen, F., Hamid, B., Zalila, B., Jmaiel, M., and Coulette,
B. Development of reconfigurable distributed em-
bedded systems with a model driven approach. Con-
Component Ensemble-based UML/MARTE Extensions for the Design of Dynamic Cyber-Physical Systems
165

currency and Computation: Practice and Experience,
Volume 27, Issue 6.
Masrur, A., Kit, M., Matena, V., Buresb, T., and Hardt, W.
(2017). Component-based design of cyber-physical
applications with safety-critical requirements. Journal
of Microprocessors and Microsystems volume 10(3),
page 1–17.
ICSOFT 2021 - 16th International Conference on Software Technologies
166
