
Towards the Formal Modeling Methodology of WSN through the
Transformation of SysML into DSPNs
Amel Berrachedi
1
, Malika Ioualalen
2
and Ahmed Hammad
3
1
Faculty of Exact Sciences and Informatics, Hassiba Benbouali University of Chlef, Chlef, Algeria
2
Department of Computing Science, MOVEP Laboratory, USTHB University, Algiers, Algeria
3
DISC/Femto-ST Department, Franche Comt
´
e University, Besanc¸on, France
Keywords:
Model-based Systems Engineering, Mapping, SysML, Activity Diagram, Deterministic Stochastic Petri Nets.
Abstract:
When developing critical and complex systems, the requirement of the systems design verification is
paramount. We address the problem of how to design these ones in order to satisfy their requirements. Wire-
less Sensor Networks (WSNs) are examples of such systems, which consist of a large amount of distributed
and autonomous nodes. We aim to propose a Model-Based Systems Engineering specification and verification
methodology for designing WSNs. The proposed approach uses SysML language to describe the WSNs re-
quirements, behaviors and performance parameters. Then, it translates the SysML elements to a Deterministic
Stochastic Petri Net (DSPNs) and integrates them into an analytic model. This allows designing WSNs and
studying their behaviors and their performances, namely energy consumption. The current paper refines the
first part of this project by transforming the activity diagram of SysML to a DSPN. To show the applicability
of the mapping technique, a case study that presents a hierarchical WSN is used.
1 INTRODUCTION
Since their appearance, Wireless Sensor Networks
(WSNs) increasingly invade the scientific and indus-
trial communities. They are used in a wide range
of applications such as environmental monitoring,
robotic exploration, traffic control, military applica-
tions, medical systems and so on. A WSN consists of
a set of miniature, autonomous and multi-functional
sensor nodes which are distributed on a capture zone
to measure a physical magnitude or monitor an event.
These nodes sense information from their environ-
ment and relay them to a base station (BS) which is
generally supposed powerful and away from the cov-
erage area (Akyildiz et al., 2002).
As sensor nodes are primarily powered by irre-
placeable and limited batteries, they should work with
a low energetic balance. So, when designing WSNs,
it is important to consider these constraints for max-
imizing the network lifetime and to verify that this
design satisfies the system requirements. To do so,
it is attractive to reap the benefits of Model-Based
Systems Engineering (MBSE) approaches (Estefan,
2008). This helps to produce easy and clear models,
to reduce the time and the maintenance costs, and to
increase the efficiency and the productivity.
Nowadays, Systems Modeling Language
(SysML), which is a general-purpose graphical
modeling language for the Systems-Engineering
domain, is the most adopted modeling language
because of its intuitive notations (Friedenthal et al.,
2008). In addition, it provides several improvements,
specifically, it considers the requirements modeling
and takes into account the strong interaction between
hardware and software system parts, which is an
important condition for effective modeling. However,
SysML is not formal. Accordingly, it does not
provide the detailed execution semantics of models
that allows the qualitative and quantitative analysis.
Therefore, integrating SysML with other engineering
analysis such as formal methods is necessary. Formal
methods are well adapted for analyzing and validating
complex systems that require rigorous verification.
Different formalisms can be used to analyze WSNs
and to evaluate their performances. Among these
formalisms, Petri Nets (PN) (Peterson, 1977) have
many advantages, particularly, Deterministic and
Stochastic Petri Nets (DSPNs) could be the most
appropriate. In fact, they are very expressive and
they represent a widely used high-level formalism for
modeling concrete and discrete-event systems where
events may occur either without consuming time,
Berrachedi, A., Ioualalen, M. and Hammad, A.
Towards the Formal Modeling Methodology of WSN through the Transformation of SysML into DSPNs.
DOI: 10.5220/0010549200830091
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 83-91
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
83

after a deterministic time, or after an exponentially
distributed time (Marsan and Chiola, 1987).
The current work represents two contributions.
The main one is to provide an overview of the
proposed methodology of the specification and the
verification of the non-functional properties in the
WSN systems especially the energy dissipation. This
methodology is based on SysML and DSPNs. We use
SysML for describing the requirements, the behaviors
and the parametric aspects of the WSN. Then, we es-
tablish the SysML behavioral specification, and there-
after, we construct the DSPN analytic model, which
will be used to compute the elementary performance
values of the designed WSN. In this step, TimeNET
model-checker is used as an analysis and evaluation
tool. The methodology might comprise a feedback,
i.e. the results of the performance evaluation should
be exploited by the SysML designers. These latter
check if the requirements are satisfied regarding the
computed performances values. The second contribu-
tion is to elaborate the first part of this methodology
in proposing mapping rules from the SysML activity
diagram to its equivalent DSPN, and thereafter, un-
rolling them via an example of WSN.
The remainder of the paper is organized as fol-
lows. Section 2 presents the background with tools
and languages used in our approach. The next section
cites works related to methodologies dealing with the
formalization of SysML diagrams, and then we com-
pare them to our own. Section 4 explains the proposed
methodology and the mapping rules. After that, we
run in the section 5 these latter through an example
of an hierarchical routing protocol in a WSN. At the
end, we close the paper with some conclusions and
possible improvements to the work.
2 BACKGROUND
WSNs are so complex so that we can not design
them without adequate high-level tools. This section
presents the tools used during this work.
2.1 SysML
SysML is an OMG standard modeling language sup-
ported by leading organizations from the systems en-
gineering industry, including the INternational Coun-
cil On Systems Engineering (INCOSE) (Friedenthal
et al., 2008). SysML is an UML profile proposed to
specify systems that include heterogeneous compo-
nents. It reuses a subset of UML diagrams, extends
others and defines new ones to provide specific sys-
tems engineering features. SysML diagrams cover
four views of system modeling. The Requirement
Diagram (RD) is used for better organizing require-
ments at different levels of abstraction and showing
explicitly the various kinds of relationships between
requirements and model elements. The PacKage Di-
agram (PKD), The Block Definition Diagram (BDD)
and the Internal Block Diagram (IBD) are used to de-
scribe the structural aspects. The State Machine Dia-
gram (SMD), the Sequence Diagram (SD) and the Ac-
tivity Diagram (AD) are used to specify behavioral as-
pects. Finally, the Parametric Diagram (PD) is used to
describe the mathematical relations between the sys-
tem parameters.
One of the tools used to elaborate the SysML di-
agrams is Eclipse Modeling Framework (EMF). This
project is a modeling framework and code generation
facility for building tools and other applications based
on a structured data model. From a model specifica-
tion described in XMI, EMF provides tools and run-
time support to produce a set of Java classes for the
model, along with a set of adapter classes that enable
viewing and command-based editing of the model,
and a basic editor. Even if the models are described
in XMI, they can be specified in UML/SysML docu-
ments. In order to create a working environment ori-
ented to this specific area, toolkits can be added to
EMF. This is the case of Papyrus which aims to pro-
vide an integrated environment for editing any kind
of EMF model and particularly supporting UML and
related modeling languages such as SysML.
2.2 Deterministic Stochastic Petri Nets
Deterministic and Stochastic Petri Nets (DSPNs) in-
troduced by Ajmone Marsan and Chiola in (Marsan,
1990) are a stochastic modeling formalism with
graphical representation which include both exponen-
tially distributed and deterministic delays. A DSPN is
a 9-tuple (P, T, I, O, V, W, Π, D, M
0
), where:
• P is a finite set of places. P = {p
1
, ..., p
n
};
• T is a finite set of transitions, disjoint from P, par-
titioned into three disjoint sets, T
I
, T
E
, and T
D
, of
immediate, exponential, and deterministic transi-
tions respectively. T = {t
1
, ..., t
m
};
• I is a set of the input arcs. I ⊆ (P × T );
• O is a set of the output arcs. O ⊆ (T × P);
• V is a set of the inhibitor arcs. V ⊆ (P×T ), where
V ∩ I =
/
0;
• W defines the weights of all arcs;
• Π is the priority function assigning a priority to
each transition. Π : T → N
+
, N
+
the set of the
positive natural numbers;
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
84

• D defines the firing times. D : T → {0} ∪ R
+
∪
Ω, where R
+
is the set of positive real numbers
and Ω = {λ
1
, ..., λ
l
} is the set of random variables
with a given distribution;
• M
0
is the initial marking.
DSPNs have the same graphical notation of places
and arcs in traditional PNs. However, immediate tran-
sitions drawn as thin bars fire without delay, expo-
nential transitions drawn as empty bars fire after an
exponentially distributed delay, whereas determinis-
tic transitions drawn as black bars fire after a constant
delay.
TimeNET (Timed Petri Net Evaluation
Tool) (Zimmermann, 2012) is a software pack-
age and an interactive toolkit for the modeling and
evaluation of PNs in which the firing times of the
transitions may be immediate, deterministic or more
exponentially distributed. It has been developed
at the Real-Time Systems and Robotics group of
Technische University at Berlin, Germany. The
project has been motivated by the need for powerful
software for the efficient evaluation of Timed Petri
Nets with arbitrary firing delays.
3 RELATED WORK
A methodology is defined in (Estefan, 2008) as a col-
lection of related processes, methods, and tools. A
MBSE methodology can be characterized as the col-
lection of related processes, methods, and tools used
to support the discipline of systems engineering in
a model-based or model-driven context. The author
has provided a brief overview of MBSE methodolo-
gies. In this section, we relate existing research to
our methodology, especially those which deal with
the formalization of SysML.
In (Wolny et al., 2020), the authors conduct a
systematic mapping study to analyze SysML publi-
cations from 2005 to 2017. It has been found that
this language is mostly used in the design or valida-
tion phase. In addition, there are approaches focus-
ing on translation like transformation to PNs, Mod-
elica, SystemC or Matlab/Simulink in order to build
frameworks for the verification and the validation of
systems design. SysML is also used in combination
with OCL, LTL or MARTE to support the implemen-
tation of an executable architecture that provides a
feasible systems engineering solution. Furthermore,
most of the publications deal with SysML profiles for
facilitating the verification of functional and/or non-
functional requirements and improving the applica-
tion of SysML to complex systems.
A great number of methodologies deals with re-
quirements that can be abstract when describing sys-
tem objectives and can be more concrete when they
relate to specific behaviors in the system or techni-
cal choices relating to its components. Specifying
the structure and the behavior of a system is to de-
scribe it by conceptual models. The validation of
the systems from the first design phases is necessary
to assure the correction of the abstract models. In
this context, works were proposed, in particular the
method AVATAR (Pedroza et al., 2011) which is one
surround including an equipped and adapted method
to the real-time and distributed systems, and assisted
by the tool Ttool. The language AVATAR is a pro-
file of SysML. It extends SysML by proposing the
language TEPE (Knorreck et al., 2011) for the ex-
pression of the properties. This methodology con-
cerns only the verification of the properties by model
checking. The traceability of the requirements and
the validation of the not functional requirements are
not taken into account in this environment. The ap-
proach OMEGA2 (Ahmad et al., 2013), includes a
feasible profile UML/SysML dedicated for the speci-
fication and the formal validation of Real-time critical
systems. The model OMEGA2 uses the tool IFx or
the simulation for the verification of the properties.
A lot of other works proposed methodologies in
the same area. (Gauthier et al., 2015) and (Zhu et al.,
2019) propose a MBSE methodology for the capture
and the definition of functional requirements in com-
plex systems like the avionics domain. The goal is
also to validate these functional requirements through
functional simulation, and verify efficiently the con-
sistency of these functional requirements.
All of these studies have in common that they
do not consider PNs as a target formalism. Sev-
eral initiatives have emerged such as (Foures et al.,
2012) and (Gutierrez et al., 2015). These papers out-
line methodologies for modeling embedded systems.
They transform SysML models in PNs and generate
VHDL code and allow to execute and simulate a sys-
tem behaviour modeled by improved SysML ADs.
Another improvement is the subject of the approach
cited in (Huang et al., 2020) which uses ADs from
UML/SysML, providing a standard object-oriented
graphical notation and enhancing reusability. The au-
thors show that a behavior model represented by a set
of compliant modeling elements in SysML ADs can
be transformed into an equivalent PN, so that the anal-
ysis capability of PN can be applied. They define thus
a formal mathematical notation for a set of modeling
elements in ADs, show the mapping rules between PN
and ADs, and finally propose a formal transformation
algorithm.
Towards the Formal Modeling Methodology of WSN through the Transformation of SysML into DSPNs
85

An other attractive work focusing on the verifica-
tion of complex systems is that presented in (Rahim
et al., 2017). The authors define a complete process to
formalize and verify SysML functional requirements
related to ADs. At first, they define a new language
called AcTRL for the formalization of functional re-
quirements at SysML level. Then, The verification is
enabled by formalizing SysML activities with Hierar-
chical Coloured Petri Nets (HCPNs) and by automat-
ically translating SysML requirements expressed on
AcTRL into temporal logic.
According to the study that was done in (Wolny
et al., 2020), the non-functional properties did not
have a big place compared to the functional ones.
Among the works that propose methodologies deal-
ing with quantitative properties, we cite (Baouya
et al., 2015) and (Huang et al., 2015). They associate
SysML bihavioral diagrams (a SMD for the first pa-
per and an AD for the second one) with the MARTE
profile for the describing of the real-time embedded
systems behaviors, and then, transforming these ex-
tended diagrams into timed automata that is expressed
in a model checker. To check the functional correct-
ness of the system under test, the time properties are
expressed in temporal logic.
We have encountered another work that verifies
the non-functional properties of a WSN by transform-
ing SysML Diagrams to a target formalism which is
different from PNs. It’s the case of (Berrani et al.,
2013) who specify a model transformation from RD,
PD, SD, BDD and IBD SysML diagrams, to their
corresponding textual elements in Modelica. Be-
sides, they have verified and validated a WSNs non-
functional property which is the energy constraint.
However, Modelica is not considered as a model
checker. In fact, it is executable but not provable.
Among the formalisms which are very efficient in
performance evaluation and which are different from
the profiles extended to SysML, there are stochas-
tic formalisms such as Markov chains and Stochastic
Petri Nets (SPNs). According to the systematic map-
ping study cited above, there are only few method-
ologies in which the formalization of SysML were
achieved by stochastic models.
In (Jarraya and Debbabi, 2014), the authors
present a model-based verification framework that
supports the quantitative and qualitative analysis of
SysML activity diagrams. To this end, they propose
an algorithm that maps SysML ADs into Markov de-
cision processes expressed by the language of the
probabilistic symbolic model checker PRISM.
As the SysML PD has not been widely used as
well as SPNs despite their great utility in the context
of WSNs, our main objective is to propose a method-
ology that combines these two tools. This is the idea
we came up in our previous work (Berrachedi et al.,
2017), and that we’ll explore in the current paper.
4 METHODOLOGY
In this section, we will briefly explain the proposed
methodology for the design of a WSN system.
4.1 Discussion
We aim to propose a methodology of the specification
and the verification of non-functional requirements of
a WSN, focusing on SysML AD as a behavioral dia-
gram since it allows to model the entire network pro-
gram. In addition, we focus on the RD and the PD di-
agrams that can be called during verification and per-
formance evaluation after the transformation from the
AD to a graphical formal model is performed. Our
main goal is to benefit from the model-based attitude
allowing the integration of the advantages of SysML
with the ones of the PNs. In fact, formal methods in-
cluding these latter, can be difficult to design or even
to understand especially for non-experts. SysML is a
semi-formal language which appears to offer an inter-
esting compromise, especially when we provide for
it a methodology for verifying and validating systems
designed with it.
The target formalism of the mapping is the class
of the DSPNs, which extends the high-level PN class
with the heterogenous transitions which have the ca-
pacity to treat different situations in terms of timed
constraints. In fact, in a WSN, random phenomena
are close to our everyday experience, at least due to
the physical changes, equipment failures, batteries de-
pletion, packets loss and so on. A stochastic process
is a mathematical model useful for the description
of phenomena of a probabilistic nature as a function
of a parameter that usually has the meaning of time
(Marsan, 1990).
Since the tasks performed by a sensor node are
based on the notion of random variable, it is necessary
to resort to stochastic models, in particular the SPNs,
given that they are graphic and therefore more flex-
ible compared to Markov chains. Furthermore, the
sensor nodes can perform tasks having a fixed time.
This is why we have thought of the DSPN formalisms
that have been introduced in (Marsan and Chiola,
1987) as a discrete and continuous-time modeling tool
which include both exponentially distributed and con-
stant timing, in contrast to Timed Petri Nets which
employ only discrete time scale for the underlying
stochastic process.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
86

Figure 1: The SysML model of the proposed approach.
(Wolny et al., 2020) notice that most of stud-
ied publication consider either discrete or continu-
ous challenges when designing systems. It means
that very rarely hybrid solutions in systems design are
taken into account. We aim to incorporate the DSPN
formal sementics with SysML to close the gap when
combining discrete and continuous modeling and ver-
ification. At last, we can evaluate the performances of
a WSN in a DSPN like energy consumption. The im-
provement we are going to make in this methodology
is to not adjust the performance parameters directly in
the DSPN, but to specify them through the SysML PD
and then inject them into the resulting DSPN model
after the mapping. This will make the approach trans-
parent for the users, especially for non-experts.
4.2 Schematization
Figure 1 describes our approach that we represented
by a SysML AD composed by four activities. The
first activity that we note CMSM Activity consists
of the creation, and eventually the modification of the
SysML models. We take into account the SysML AD,
PD and RD diagrams. In the case of WSNs, the sen-
sor nodes behaviors can be modeled using the SysML
AD. We signal here, that the choice of the SysML AD
to describe behavioral aspects of WSNs is due to its
capabilities to capture probabilistic behaviors which
is an important characteristic when modeling WSNs.
In fact, the SysML AD introduces the notions of rates
and probabilities. In addition, contrary to other be-
havioral diagrams, the AD can model the control and
the data flows for the hole system and even in a hier-
archical manner. Once the SysML elements are cre-
ated, the DSPN analytic model will be established.
This second operation is represented by the CAM Ac-
tivity. We note MA Activity, the performing of the
resulting DSPN in order to analyse the WSN proper-
ties and to evaluate its performances, in particular the
energy consumption. In the last activity called RV
Activity, we check whether the obtained results are
consistent with the system requirements, and thus our
approach is completed. In contrast, we need to adjust
this approach and run it again. The process described
Towards the Formal Modeling Methodology of WSN through the Transformation of SysML into DSPNs
87
above is repeated until we get the desired results.
The process we are going to follow in order to set
up the proposed approach will go through three es-
sential stages. We prefer to not present the SysML
diagrams at the same time but this will be done grad-
ually according to these three steps. These latter are
represented by the dotted red frames in the figure 1.
We start by transforming the AD into a DSPN
using the mapping rules described below (in sec-
tion 4.3). The second step is to inject, into the result-
ing DSPN model, the performance parameters mod-
eled by the PD, in particular the energy consumption.
We can thus proceed to the analysis of the model and
the evaluation of this parameter. In the last step, the
obtained results will be compared with the constraints
described in the RD and finally proceed to their val-
idation. Now, we deal with only the first part of the
approach. The two remaining steps will be explored
in the future works.
4.3 Mapping Rules
This section seeks to transform an AD to a DSPN. The
both exist at a higher level of abstraction. It is also es-
sential to have a model-level vision of the expected
results. Since this is the mapping from a semi-formal
language to a formal one, then it is necessary to en-
sure that the semantics and the behavior of the AD
elements are preserved in the equivalent DSPN.
Concerning how to derive the elements of the
AD to a DSPN, we proceed with the generic method
which consists to translate the AD basic elements to
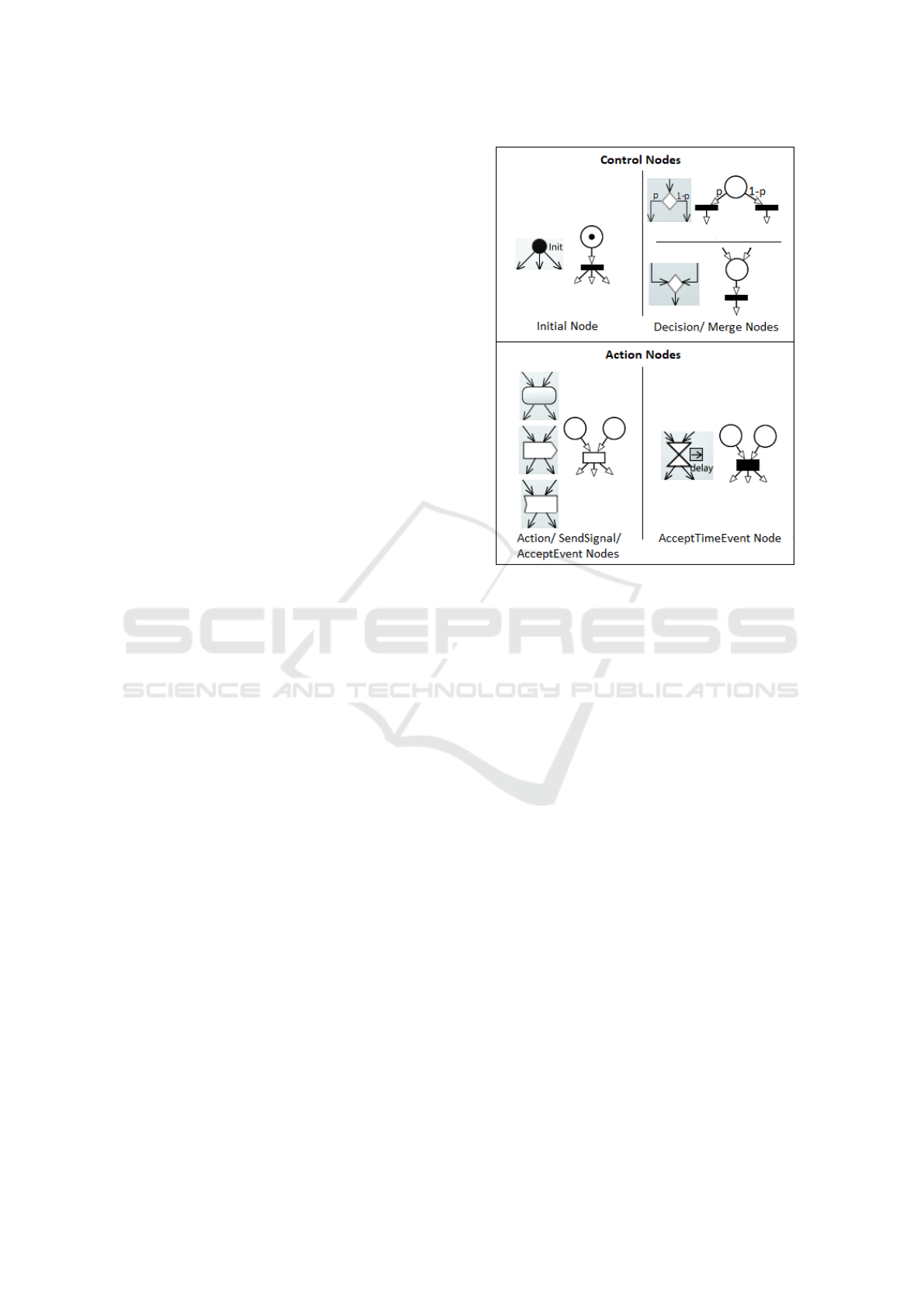
the DSPN ones, and then interconnecting them. Fig-
ure 2 shows the mapping of the control and the action
nodes, necessary in our work.
The InitialNode acts as a starting point for exe-
cuting an Activity. The conversion is performed by
creating a marked initial place connected to an im-
mediate transition allowing each outgoing arc to be
provided with a token. The places are used to model
the tokens which are implicitly represented in the AD.
Concerning the MergeNode, it brings together mul-
tiple flows without synchronization. A MergeNode
shall have exactly one outgoing ActivityEdge but may
have multiple incoming ActivityEdges. The conver-
sion is performed by creating a place that receives
the tokens of each input arc. This place is linked to
an immediate transition which directly redistributes
each token at the output. A DecisionNode chooses
between outgoing flows. It shall have at least one and
at most two incoming ActivityEdges, and at least one
outgoing ActivityEdge. The conversion is performed
by creating a place connected to immediate transitions
through arcs with guards. The number of these transi-
Figure 2: Mapping rules from SysML-AD to DSPN.
tions depends on the number of the decision outputs.
The guards represent the probabilities to perform the
sensor nodes tasks.
The ActionNodes including SendSignal and Ac-
ceptEvent Nodes are converted into stochastic transi-
tions with input places and also input and output arcs.
There is an exception concerning the AcceptEvent-
TimeActionNode which is converted into a determin-
istic transition since this latter plays the role of a time
trigger. The deterministic transition is associated with
input places as well as input and output arcs.
This is inspired from prior work, although their
mapping rules do not take into account certain as-
pects of the DSPNs that can be applied in complex
systems such as WSNs. In our case, we improved the
translation of the wait time action (AcceptEventTime-
Action) in the AD by using a deterministic transition
in the DSPN. Another improvement concerns the de-
cision nodes in which we associate a probability to
each output edge that we translate to a DSPN immedi-
ate transition containing this probability. In addition,
the action nodes are the consuming nodes in terms
of time, which is equivalent to stochastic and deter-
ministic transitions. On the other hand, the control
nodes are only used to control the sequencing which
is equivalent to the immediate transitions having a fir-
ing time equal to 0.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
88

5 RUNNING EXAMPLE
In order to illustrate the usability of the proposed
mapping rules, a WSN based on a hierarchical topol-
ogy was considered as a running example. More pre-
cisely, we take the example of the LEACH protocol,
one of the first to follow this topology (Chandrakasan
et al., 2000). According to this latter, the sensor nodes
are organized into clusters. Each cluster is managed
by a single node called Cluster Head (CH). Only CHs
communicate with the BS, manage clusters and ag-
gregate data. For that, they perform the most expen-
sive energy tasks while no-CH nodes (or members)
are dedicated only to sensing. CHs remain so for a
period of time called round, then they switch roles
during other rounds to get equitable power dissipation
within the network.
At the beginning of each round, each node deter-
mines the possibility of being a CH. If it decides to
be with generally a percentage of 5%, it announces its
decision to all neighboring nodes. Non-CH nodes join
the closest elected CH. Once the clusters formed, the
CHs assign time slots to their members. Each member
picks up information from its environment and sends
them to the CH. Used as gateway to reach the BS, the
CHs aggregate the received data and send the final re-
sult to the BS.
5.1 Sensor Node Activity Diagram
In figure 3, we model the behavior of a sensor node
during one round. It can be seen that the action nodes
of the AD model the tasks carried out by a sensor
node while the control nodes organize the sequenc-
ing of these tasks. On the one hand, the local tasks
of a sensor node are modeled by Actions. On the
other hand, the sending and receiving operations are
modeled by SendSignalAction and AcceptEventAc-
tion nodes respectively. Concerning the tasks which
consume a fixed period of time, they are modeled by
AcceptTimeEventAction node.
Initially, a sensor node is in the initial state (Init
node). The begining of a new round is modeled by
the merge node BeginRound which receives an arc,
either from the initial node (to specify the first round
of the algorithm), or after the ending of the current
round and the return to the starting state in order to
begin the next round.
The sensor node subsequently calculates the
threshold with which it decides to become CH or non-
CH. This is achieved through the ComputeDec ac-
tion. According to the aforementioned assumption,
the percentage of the number of CH is 5%. Thus, the
probability that a sensor node becomes CH is equal
Figure 3: Sensor node Activity Diagram based on LEACH
protocol.
to 0.05. This is represented on the first outgoing edge
of the BecomeCH decision node, with a weight equal
to 0.05. Otherwise, a node not wishing to be CH will
become member with a probability equal to 0.95 rep-
resented on the second edge.
In the first case, the CH sends its decision to other
sensor nodes by performing the S Dec action. Since
the sensor nodes are not uniformly distributed over
the capture zone, a CH may not have members in its
cluster. In this case, it has to sense its own information
(SenseCH action) with a certain probability λ
1
and
sends it to the BS (S CHBS Action).
In contrast, this CH receives (R Join action)
memberships acknowledges from other non-CH
nodes to join its cluster with a probability 1 − λ
1
. Af-
ter that, it creates a table TDMA which it diffuses to
its members (S TDMA action). After that, it receives
their data (R Data action) and aggregates them after
an elapsed period (Aggr action with a fixed period
Delay). The merge node EndCHWork indicates the
end of the role of a CH node. It owns two incoming
edges signifying either the CH had members or not.
If one of the edges is sensitized then the S CHBS ac-
tion is executed. Regarding the behavior of a non-CH
node, we do the same work.
Finally, the end of the round is modeled by the
EndRound merge node, and then, the sensor node
Towards the Formal Modeling Methodology of WSN through the Transformation of SysML into DSPNs
89
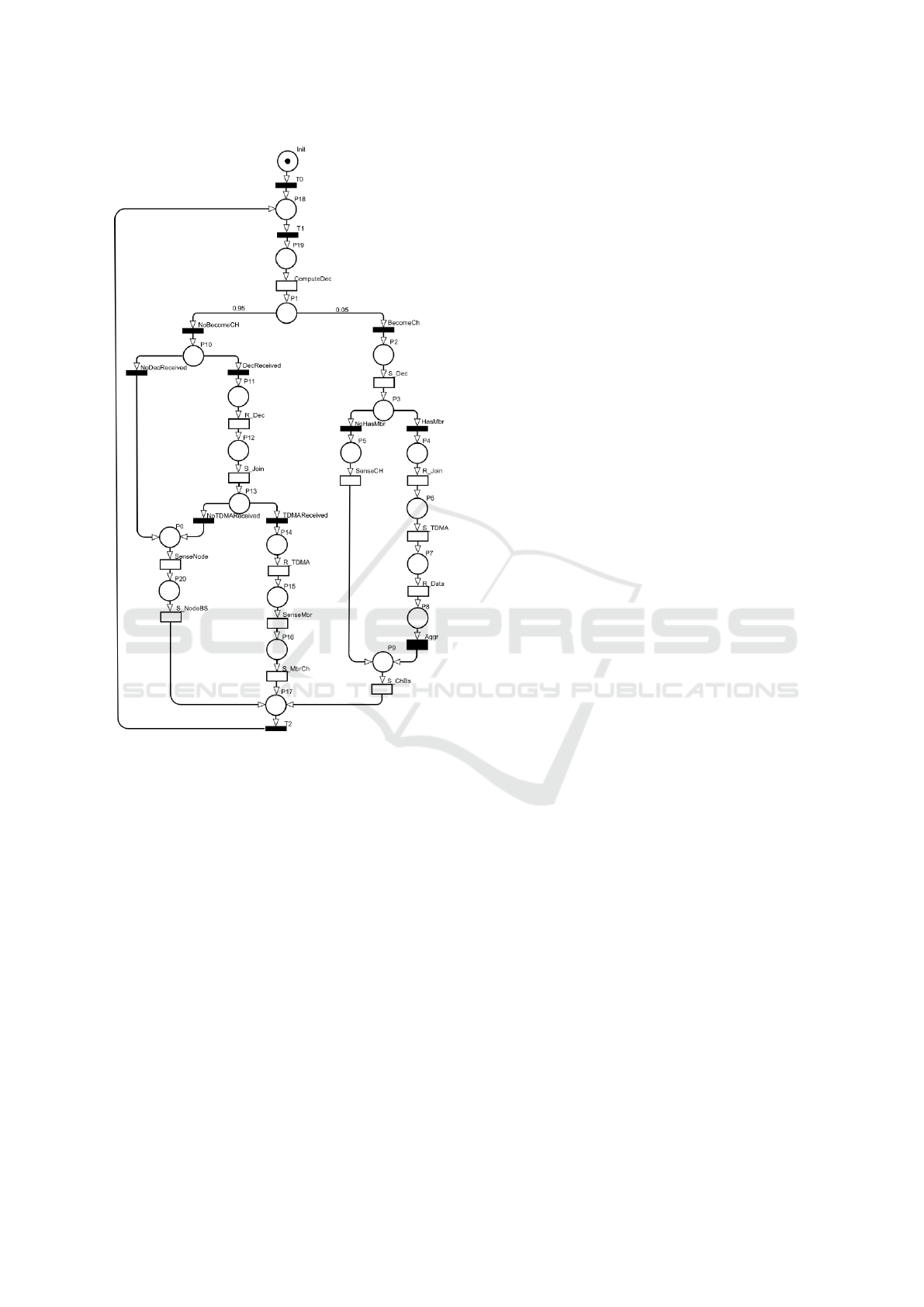
Figure 4: The resulting DSPN after mapping from SysML
AD.
returns to its initial state which is modeled by Begin-
Round merge node.
5.2 Mapping and Preliminary
Verification
As operations that sensor nodes perform, can last ei-
ther a predefined time (like the aggregation which
is fixed) or a random time (like emission/reception
tasks), the use of the DSPNs is necessary. In fact,
the predefined and random times are modeled by de-
terministic and exponential transitions respectively.
Once the DSPN model is created, the performances
measures can be evaluated. The DSPN model associ-
ated to the sensor node AD seen previously, is given
in the figure 4.
Before talking about the verification of non-
functional properties and working out the remain-
ing steps of the proposed methodology, we have to
assume that some functional properties have to be
checked on the long run of the studied model. With
TimeNET, if the simulation at the steady state occurs,
it means that the DSPN model admits a stationary
state and therefore the basic properties are checked.
Three basic properties have to be discussed: the
bounded nature of the modeled system, its degree of
activity and finally its reset. The first property an-
swers the question of whether the number of tokens
circulating in the network is limited or not. The sec-
ond considers whether a part or all of the network may
or may not evolve. The last one checks whether the
network admits an initial state and therefore it can be
reset. After verifying these properties, TimeNET dis-
plays results.
In addition, TimeNET can perform the station-
ary evaluation of the DSPN, with the restriction of
”not more than one enabled transition with non-
exponentially distributed firing time in each marking”
(Marsan, 1990). As our analytical model admits only
one deterministic transition, i.e., we can never have
more than one enabled deterministic transition in each
marking, then this restriction is satisfied.
However, the initial node in the AD shall not have
any incoming ActivityEdges. This implies that in the
resulting DSPN, we cannot have an initial node with
an input arc. In this case, we will have a DSPN which
has a place that cannot be accessed after a certain
time, which does not preserve a basic functionality
called liveliness, so the second base property is not
checked. In addition we notice that there are imme-
diate unnecessary transitions which will not influence
the functioning of the DSPN model. We must there-
fore proceed to a reduction of the graph without losing
the semantics of the resulting model. These gaps will
be the subject of a future work.
6 CONCLUSION
Nowadays, the use of the semi-formal and formal
models, in order to design complex systems and ex-
press their properties, becomes a very active research
topic. In this paper, we proposed an approach based
on both SysML and DSPN models. This approach
consists on a specification and verification methodol-
ogy for designing WSNs. It helps to produce easy and
clear models, to reduce the time and the development
and maintenance costs, and to increase the efficiency
and the productivity.
However, the SysML/AD-to-DSPN transforma-
tion has not been performed in an automatic way. In
addition, we got a model having unnecessary immedi-
ate transitions and in which the liveliness property is
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
90

not done. These gaps are research topics we consider
later. Once the resulting model is relevant, we have
to exploit the SysML PD, and so, the non functional
parameters modeled by it should be injected into the
DSPN model in an automatic manner too.
Important work remains to be done, to provide a
formal framework for a better properties verification
and performance evaluation of the WSNs technology.
REFERENCES
Ahmad, M., Dragomir, I., Bruel, J., Ober, I., and Belloir,
N. (2013). Early analysis of ambient systems sysml
properties using omega2-ifx (regular paper). In In-
ternational Conference on Simulation and Modeling
Methodologies, Technologies and Applications, pages
147–154, http://www.scitepress.org/. SciTePress.
Akyildiz, I., Su, W., Sankarasubramaniam, Y., and Cayirci,
E. (2002). Wireless sensor networks: a survey.
J. Computer Networks: The International Journal
of Computer and Telecommunications Networking,
38:393–422.
Baouya, A., Bennouar, D., Mohamed, O. A., and Ouchani,
S. (2015). A probabilistic and timed verification ap-
proach of sysml state machine diagram. In 2015 12th
International Symposium on Programming and Sys-
tems (ISPS), pages 1–9.
Berrachedi, A., Rahim, M., Ioualalen, M., and Hammad, A.
(2017). Validation of a sysml based design for wire-
less sensor networks. AIP Conference Proceedings,
1863(1):330002.
Berrani, S., Hammad, A., and Mountassir, H. (2013). Map-
ping sysml to modelica to validate wireless sensor net-
works non-functional requirements. In In IEEE 11th
International Symposium on Programming and Sys-
tems (ISPS’2013), pages 191–200.
Chandrakasan, A., Balakrishnan, H., and Heinzelman,
W. R. (2000). Energy-efficient communication pro-
tocol for wireless microsensor networks. Proceedings
of the 33rd Hawaii International Conference on Sys-
tem Sciences, 2:1–10.
Estefan, J. (2008). Survey of model-based systems engi-
neering (mbse) methodologies, rev.b. INCOSE MBSE
Focus Group, 25:1–70.
Foures, D., Albert, V., Pascal, J., and Nketsa, A. (2012).
Automation of sysml activity diagram simulation with
model-driven engineering approach. In Proceed-
ings of the 2012 Symposium on Theory of Modeling
and Simulation - DEVS Integrative M&S Symposium,
number 11 in TMS/DEVS ’12, pages 1–6, San Diego,
CA, USA. Society for Computer Simulation Interna-
tional.
Friedenthal, S., Moore, A., and Steiner, R. (2008). Omg
systems modeling language (omg sysml
TM
) tutorial.
INCOSE International Symposium, 18:1731–1862.
Gauthier, J., Bouquet, F., Hammad, A., and Peureux, F.
(2015). Tooled process for early validation of sysml
models using modelica simulation. In Dastani, M.
and Sirjani, M., editors, Fundamentals of Software
Engineering, pages 230–237, Cham. Springer Inter-
national Publishing.
Gutierrez, A., Chamorro, H., Jimenez, F., Villa, L., and
Alonso, C. (2015). Hardware-in-the-loop simulation
of pv systems in micro-grids using sysml models. In
2015 IEEE 16th Workshop on Control and Modeling
for Power Electronics (COMPEL), pages 1–5.
Huang, C., Huang, Z., Hu, J., Wu, Z., and Wang, S. (2015).
A mde-based approach to the safety verification of ex-
tended sysml activity diagram. Journal of Software,
10:56–70.
Huang, E., McGinnis, L. F., and Mitchell, S. W. (2020).
Verifying sysml activity diagrams using formal trans-
formation to petri nets. the Journal of the Interna-
tional Council of Systems Engineering, 23(1):118–
135.
Jarraya, Y. and Debbabi, M. (2014). Quantitative and qual-
itative analysis of sysml activity diagrams. Inter-
national Journal on Software Tools for Technology
Transfer, 16:399–419.
Knorreck, D., Apvrille, L., and de Saqui-Sannes, P. (2011).
Tepe: a sysml language for time-constrained prop-
erty modeling and formal verification. ACM SIGSOFT
Software Engineering Notes, ACM, 36(1):1–8.
Marsan, M. and Chiola, G. (1987). On petri nets with deter-
ministic and exponentially distributed firing times. In
Rozenberg, G., editor, Advances in Petri Nets 1987,
pages 132–145, Berlin, Heidelberg. Springer Berlin
Heidelberg.
Marsan, M. A. (1990). Stochastic petri nets: An elemen-
tary introduction. In Rozenberg, G., editor, Advances
in Petri Nets 1989, pages 1–29, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Pedroza, G., Apvrille, L., and Knorreck, D. (2011). Avatar:
A sysml environment for the formal verification of
safety and security properties. 2011 11th Annual In-
ternational Conference on New Technologies of Dis-
tributed Systems, NOTERE 2011 - Proceedings, pages
1–10.
Peterson, J. L. (1977). Petri nets. J. ACM Computing Sur-
veys, 9:223–252.
Rahim, M., Hammad, A., and Ioualalen, M. (2017). A
methodology for verifying sysml requirements using
activity diagrams. Innovations in Systems and Soft-
ware Engineering, 13(2):1–14.
Wolny, S., Mazak, A., Carpella, C., Geist, V., and Wim-
mer, M. (2020). Thirteen years of sysml: a system-
atic mapping study. Software and Systems Modeling,
19:111–169.
Zhu, S., Tang, J., Gauthier, J., and Faudou, R. (2019). A
formal approach using sysml for capturing functional
requirements in avionics domain. Chinese Journal of
Aeronautics, 32(12):2717–2726.
Zimmermann, A. (2012). Modeling and evaluation of
stochastic petri nets with timenet4.1. In In: 6th In-
ternational Conference on Performance Evaluation
Methodologies and Tools (VALUETOOLS), pages 1–
10.
Towards the Formal Modeling Methodology of WSN through the Transformation of SysML into DSPNs
91
