
PrendoSim: Proxy-Hand-Based Robot Grasp Generator
Diar Abdlkarim
1,3
, Valerio Ortenzi
2
, Tommaso Pardi
1
, Maija Filipovica
1
,
Alan M. Wing
1
, Katherine J. Kuchenbecker
2
and Massimiliano Di Luca
1
1
University of Birmingham, U.K.
2
Max Planck Institute for Intelligent Systems, Stuttgart, Germany
3
Obi Robotics Ltd, U.K.
www.obirobotics.com
Keywords:
Robot Grasping, Simulation, Virtual Environment, Virtual Reality.
Abstract:
The synthesis of realistic robot grasps in a simulated environment is pivotal in generating datasets that support
sim-to-real transfer learning. In a step toward achieving this goal, we propose PrendoSim, an open-source
grasp generator based on a proxy-hand simulation that employs NVIDIA’s physics engine (PhysX) and the
recently released articulated-body objects developed by Unity (https://prendosim.github.io). We present the
implementation details, the method used to generate grasps, the approach to operationally evaluate stability of
the generated grasps, and examples of grasps obtained with two different grippers (a parallel jaw gripper and
a three-finger hand) grasping three objects selected from the YCB dataset (a pair of scissors, a hammer, and a
screwdriver). Compared to simulators proposed in the literature, PrendoSim balances grasp realism and ease
of use, displaying an intuitive interface and enabling the user to produce a large and varied dataset of stable
grasps.
1 INTRODUCTION
Robots exhibit good manipulation skills in structured
environments, where objects are in controlled posi-
tions, information about the environment is complete
and accurate, and actions are repetitive. However,
grasping and manipulation become challenging in un-
structured environments, such as households and hos-
pitals. Here, perception can be noisy and unreliable,
so each action requires reasoning on imperfect sen-
sory data. Despite these problems, robots are in-
creasingly used in industry settings that require com-
plicated dexterous manipulation, such as grasping a
hammer to pound a nail. Sometimes, robots are used
in collaborative, joint-manipulation tasks with human
partners, e.g., during the assembly of a piece of furni-
ture, where the robot could pass tools to the human
partner (Ortenzi et al., 2020b) or directly tighten a
screw on a wood panel held by the human partner.
Collaboration adds another level of complication, as
there are two interacting agents sharing the space and
the tools (Ajoudani et al., 2017).
To be useful in these scenarios, robots need to be
able to grasp objects. Robot grasping has been studied
for over three decades, and enormous advances have
Figure 1: Spherical object grasped using PrendoSim’s Bar-
rettHand gripper (solid rendering) and depiction of the kine-
matic gripper employed in the proxy-hand method (mesh
lines).
been achieved in perception, planning, and grasp syn-
thesis. However, some of the assumptions on which
most of the work is based are still difficult to re-
lax: objects are usually assumed to be rigid, fric-
tion is generally ignored or assumed to be uniform
for the entire object, functional parts are usually not
accounted for, and the task to be performed with the
object is not considered (Ortenzi et al., 2019).
60
Abdlkarim, D., Ortenzi, V., Pardi, T., Filipovica, M., Wing, A., Kuchenbecker, K. and Di Luca, M.
PrendoSim: Proxy-Hand-Based Robot Grasp Generator.
DOI: 10.5220/0010549800600068
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 60-68
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Many current approaches to grasping are looking
into robot learning as a way of overcoming these limi-
tations (Levine et al., 2018). However, learning grasp-
ing policies applicable to a wide range of situations
requires large datasets of grasps, i.e., employing dif-
ferent objects, different poses for the objects, differ-
ent grippers, and different tasks. It is generally im-
practical to obtain a high number of successful grasps
with real robots; thus, simulators are commonly used
instead. However, the main challenges with simula-
tors are (i) to generate an extensive range of grasps
and (ii) to ensure that the grasps sufficiently replicate
the characteristics of real robots grasping real objects,
minimising sim-to-real differences.
Here, we present PrendoSim, an open-source
grasp generator based on the popular Unity game en-
gine (Unity Technologies, San Francisco, CA), which
allows one to create visually and physically realistic
grasping by using advanced physics simulation of dy-
namic properties, such as friction, weight, weight dis-
tribution, and inertia (Fig. 1). As opposed to most
other grasp generators, PrendoSim has been designed
to require only minimal knowledge of mechanics and
can be controlled with an intuitive user interface with
no programming requirements. The generated grasp
configurations are stored both as an image (PNG for-
mat) and in a standard JSON file format (JavaScript
Object Notation) to enable visual and numerical anal-
ysis and sharing to hardware systems. The version of
PrendoSim presented in this paper can be downloaded
for free from the following URL: https://prendosim.
github.io
2 RELATED WORK
The synthesis and evaluation of grasp candidates in-
volve several aspects that make selecting a suitable
grasp challenging, e.g., the object’s geometry, the ob-
ject’s friction parameters, and the mechanical charac-
teristics of the gripper. Some approaches capitalise
on the design of the hardware to ensure stable grasp-
ing and simplify control. This is the case for in-
dustrial applications where either suction or parallel
jaw grippers are generally used (Honarpardaz et al.,
2017). When more sophisticated grippers are em-
ployed, e.g., multi-fingered hands inspired by the hu-
man hand, the increase in dexterity comes at the cost
of higher complexity and control effort (Berceanu and
Tarnita, 2012).
Given a gripper and an object to grasp, there are
usually a number of possible grasps to choose from.
Force- and form-closure methods select grasp candi-
dates based on stability. For example, force-closure
is based on a mathematical formula that analytically
determines whether the gripper and the object form
a system resistant to external wrenches (Nguyen,
1988). For this, physical quantities like the geometric
configuration of the grasp and of the object, the forces
applied, gravity, and friction all need to be considered
to compute whether the grasp is stable (Ferrari and
Canny, 1992; Bicchi and Kumar, 2000; Ding et al.,
2001). However, there is no consensus on how to de-
fine stability across the community. More operational
definitions consider grasps to be stable whenever the
object is held by the robot gripper for more than a
certain amount of time, or after shaking (Bekiroglu
et al., 2020). PrendoSim similarly adopts an opera-
tional definition of stability, which we will cover in
detail in the following sections.
There are a number of different approaches for
grasp selection. Work like (Gualtieri et al., 2016)
proposed to use artificial neural networks to gener-
ate and evaluate grasps for parallel grippers. At first,
the network learns the key features for grasping ob-
jects from a dataset. Then, it picks the grasp config-
uration that is similar to the ones that had a greater
degree of success. Such simulation-based approaches
can be successful in simulated environments and with
known objects, but they do not usually allow for suc-
cessful sim-to-real transfer learning. Other methods
propose employing local features to make the grasp
more robust (Adjigble et al., 2018). In this case an
algorithm scans the object surface to identify areas
where the local object curvature matches the finger’s
curvature. This method yields more robust results as
it is based on real point clouds and on the kinematics
of the gripper, and it could extend to more complex
grippers with more than two fingers. However, sev-
eral factors (dynamics, forces, friction and the task
context) are not considered in selecting and evaluat-
ing the grasps.
Although researchers are attempting to improve
grasping generation strategies to include new ele-
ments such as friction coefficients (Nguyenle et al.,
2021), only a few of these new grasp generators are
open source and available for download. GraspIt!
(Miller and Allen, 2004) is among the most frequently
used simulators. It provides a framework for test-
ing grasp strategies on a variety of hands. It has a
3D graphical interface, and both robots and obsta-
cles can be loaded using Python scripts. URDF and
XML configuration files allow the user to simulate
complex scenes with more than one robot and ob-
ject, e.g., a kitchen with a service robot. The soft-
ware generates a set of grasps that satisfy the force-
closure metric and are feasible considering the robot
kinematics. The physics engine of GraspIt! allows
PrendoSim: Proxy-Hand-Based Robot Grasp Generator
61

the user to pick up objects and check the dynamic be-
haviour of both robot and object. Because of its ver-
satility, researchers have developed several packages
that integrate GraspIt! with the Robot Operating Sys-
tem (ROS) and Gazebo, a popular visualization and
development tool in the robotics community. How-
ever, the main branch of GraspIt! has been discontin-
ued, and only a few volunteers are maintaining the
software for specific applications. Also, GraspIt! is
platform dependent and only available for the Linux
operating system.
Another very common simulator is Simox
(Vahrenkamp et al., 2012). Simox is a robotic tool-
box for motion and grasp planning, and it allows the
import of complex kinematic chains, like humanoids
and mobile robots. Simox is developed in C++, which
affords efficiency, and it can be used by either script or
interface. An additional strength is that it is platform
independent. The user may load the CAD model of an
object and a hand using an XML file. Then, the algo-
rithm generates a sequence of robust grasp points on
the object surface. A collection of metrics are already
available in the software. Additionally, users may de-
fine their own metric. By default, Simox produces
grasp locations according to the force-closure metric.
This software considers friction by defining friction
cones at the contact points between hand and object.
However, it discounts the effects of an object’s weight
and distribution of mass while grasping. Thus, grasps
produced by Simox may fail to keep the object in-
hand in a real scenario due to mismatches between the
simulated and real interactions. Moreover, Simox in-
stallation requires advanced programming skills to set
up the environment correctly. Our PrendoSim eases
the burden for the user with a friendly installation pro-
cess suitable also for programming-naive users.
Beside specific software targeted at grasping, the
robotics community also resorts to more general
simulators, e.g., CoppeliaSim
1
, PyBullet
2
, MoveIt
3
and MuJoKo
4
. These software packages offer well-
rounded physics engines and allow the simulation of
complex scenes, so that they can be employed to test
grasps. However, they are not designed to generate
grasps and do not implement any grasp generator by
default. Therefore, users must code a generator that
is tailored to the application at hand. Only a few
programmers have released grasp generators for these
software packages, e.g., multi-contact-grasping
5
is a
grasp generator for CoppeliaSim, and OpenAI devel-
1
https://www.coppeliarobotics.com/
2
https://pybullet.org/wordpress/
3
https://moveit.ros.org/
4
http://www.mujoco.org/
5
https://github.com/mveres01/multi-contact-grasping
oped a Python package for PyBullet.
In addition to the custom grasp generators and
more generic simulators mentioned so far, there is
another class of simulation engines offered through
game engines, such as Unity. Until recently, how-
ever, it was challenging to create realistic simulators
in this class of software, because engines emphasised
smooth game performance rather than physical real-
ism. In other words, modelling kinematic chains or a
system of connected hinges, as often seen in robotics,
would have resulted in unstable and unrealistic mo-
tion, unfit for translating to a real robot. With the
latest release of Unity v2020.1 beta, this situation has
now changed. Major game engines like Unity are now
incorporating state-of-the-art, hardware-accelerated,
real-world physics simulators with the aim to support
a growing robotics community in research and proto-
type development.
In the following sections we describe how our
grasp generator takes advantage of Unity’s new and
powerful physics simulator, our proxy-hand-based
grasping method, and the performance test to evalu-
ate generated grasps. We report a number of resulting
grasps and describe the output of PrendoSim.
3 PrendoSim
Our simulator takes advantage of Unity’s articulated
bodies to define a set of connected objects organized
in a hierarchical parent-child tree. This framework
can be used to define mutually constrained parts, such
as joints, digits and rotational limits in a robot gripper.
The root of the hierarchy tree is the base of the robot
gripper, and the furthest components in the tree are the
tips of the gripper’s digits. Moreover, we implement a
new method of contact force estimation for simulated
robotic object grasping. The estimated grip forces are
checked in our grasp stability test, where we gradually
increase the loading on the object until it slips.
Our grasp generator also takes advantage of
Unity’s physics materials to define friction. To com-
pute the friction coefficient, which determines the ra-
tio between lateral force and normal force, our ap-
proach combines material-dependent parameters of
the gripper and object and a Coulomb friction model
with separate static and kinetic coefficients. We de-
scribe the implementation details in Sect. 3.3. Finally,
physics materials also define a term for elasticity, but
in our simulations we have set this term to zero. In
other words, we simulated only rigid surfaces even
though elasticity could be varied to extend the scope
of the project.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
62
3.1 Proxy-Hand Method
We adopted a method that is commonly employed in
haptic rendering and virtual reality simulation. The
method can take several names depending on the spe-
cific implementation such as proxy, avatar, virtual
tool, or god-object. Because it is under direct user
control, the proxy is not amenable to exact predic-
tion (Dworkin and Zeltzer, 1993). Its interactions
with objects cannot be anticipated and thus need to
be simulated. An algorithm was proposed where such
a user-controlled object retains information about its
contacts with objects to improve force rendering by
considering the history of the interaction (Zilles and
Salisbury, 1995).
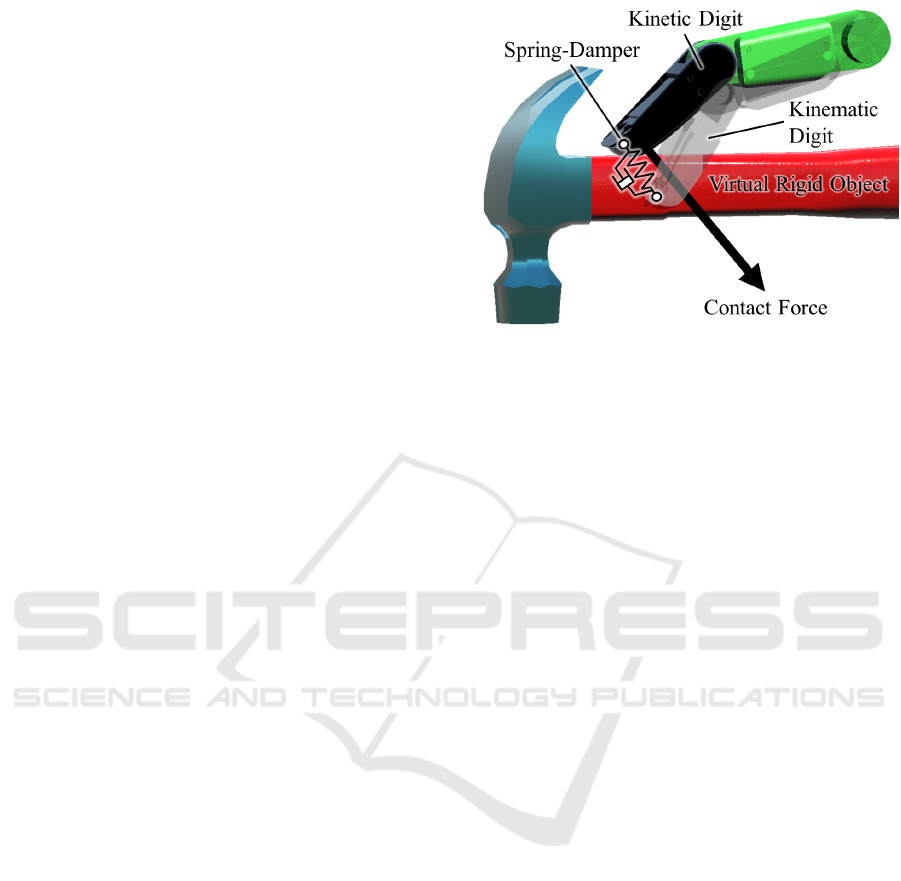
The proxy-hand method (Borst and Indugula,
2005) applies similar principles to simulate grip-
force-based object grasping without attempting to
predict the action of the robot gripper. We use a
kinetic gripper that physically interacts with the vir-
tual objects and is driven by a kinematic copy, which
does not interact with the virtual object. We apply
this method using Unity’s “Articulated Body” compo-
nent. The articulated component of each of the grip-
per’s joints defines the associated stiffness and damp-
ing parameters, the maximum force or torque a joint
can exert, and the joint’s positional or angular lim-
its, all according to the manufacturer’s specifications.
The opening and closing motions of the kinetic grip-
per are driven gradually by updating the target angle
or position of the kinematic gripper. Without a gras-
pable object, all joints are driven to their angular or
positional limit, reaching the gripper’s closed state at
the same time.
The tips of each of the kinematic and kinetic grip-
per’s digits are coupled with a spring and a damper
(Fig. 2). Because of this coupling, the configuration
of the kinetic gripper closely follows that of the kine-
matic gripper unless there are contacts with objects.
Unity’s collision-detection algorithm prevents inter-
penetration between the kinetic gripper and the ob-
ject, while the kinematic gripper penetrates into the
object. If the kinetic gripper is in contact with the ob-
ject, the configuration of the two simulated grippers
differs and loads the springs that connect the finger-
tips, thus creating a contact force applied by the ki-
netic gripper. The contact force is proportional to the
distance between the tips of the kinematic and kinetic
grippers (penetration distance) (H
¨
oll et al., 2018). To
achieve a grasp that does not overly squeeze the ob-
ject, we set a force threshold to stop the squeeze based
on the known object mass. For example, we set a
5.5 N contact force threshold for an object with 500 g
mass, which is about 10% larger than the minimum
Figure 2: Contact force generation using the proxy-hand
method. The positional discrepancy between the kinematic
and kinetic digits results in a force (F ) computed from the
spring-damper linking the two.
5 N required to hold the object. This contact force is
divided evenly between the digits in contact with the
object so that the set total grip force is exerted on the
object.
3.2 Grasp Generation
Our simulator synthesises gripper configurations
based on a grasp quality index computed through
a dynamically changing load force, which also ac-
counts for friction. The following steps estimate the
performance of a randomly generated object grasp
under friction and dynamics. This sequence of ac-
tions forms the core strategy of PrendoSim; it allows
derivation and validation of every grasp candidate for
any given target object.
1. The gripper starts in a fully open configura-
tion. Any degree of freedom (DOF) available for
changing the type of grasp is set to a random joint
value.
2. One of the provided target objects is randomly
chosen and instantiated in front of the gripper,
with a random pose held statically for one second.
3. Within the one-second window the gripper pro-
ceeds to close as described in section 3.1.
4. The target object is then released to allow physical
interaction with the gripper’s digits.
5. The object will then either fall due to gravity or
reach a stable state (i.e., no motion for two sec-
onds) within the gripper. In the former case, we
discard the grasp. In the latter, we consider the
grasp successful.
PrendoSim: Proxy-Hand-Based Robot Grasp Generator
63
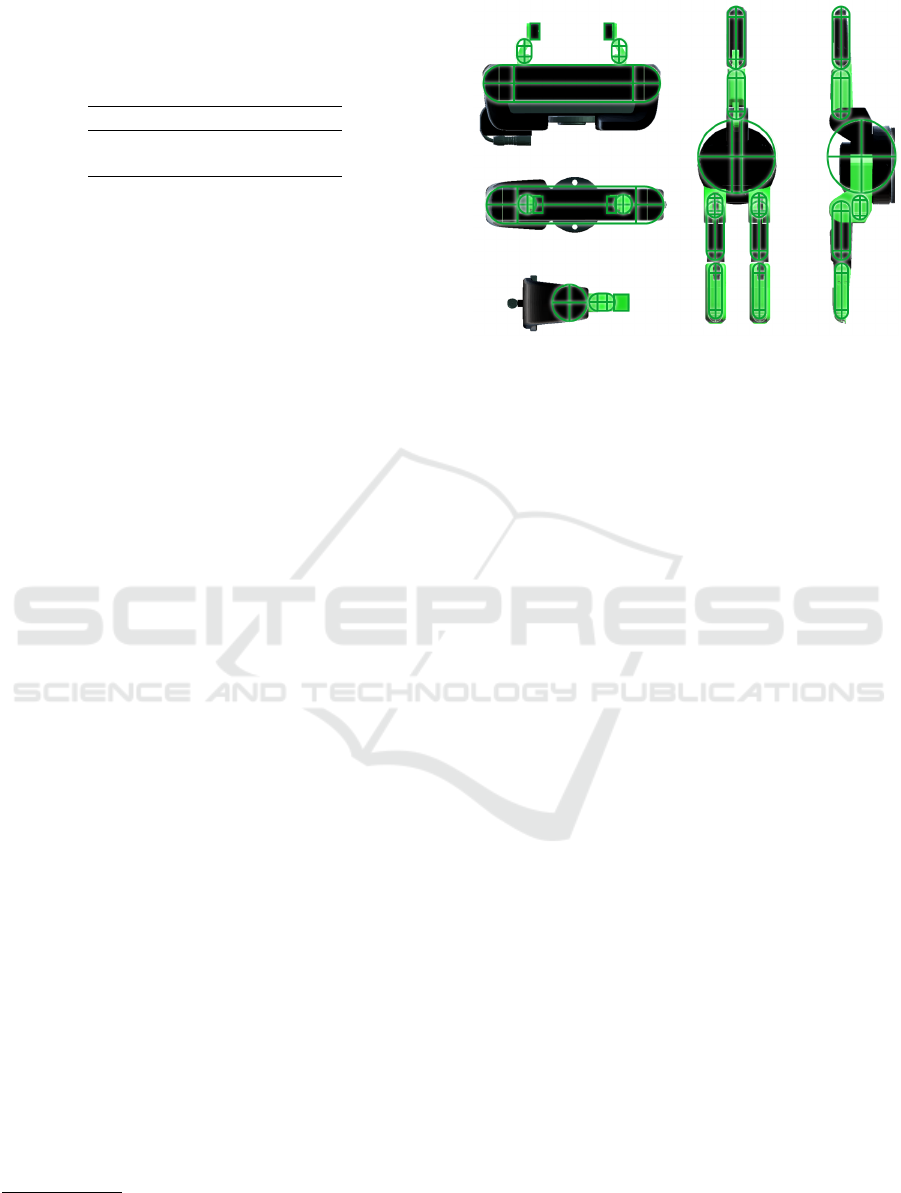
Table 1: Static (π
s
) and kinetic (π
k
) friction parameters for
the two grippers used in PrendoSim. Friction coefficients
µ
s
and µ
k
are calculated by averaging the friction parameter
value of the gripper and the value of the object surface that
it is touching (shown in Table 2).
Gripper π
s
π
k
Franka Emika 0.90 0.50
BarrettHand 0.70 0.25
6. To further evaluate grasp stability, we gradually
increase the mass of the object at a rate of 1.2 kg/s
to measure the point at which the object starts to
fall out of the gripper. An empirically selected ve-
locity threshold of 2.5 cm/s is used to detect when
the object starts to fall.
7. The object mass at this point is defined as the crit-
ical mass.
8. Optionally, this value, together with the gripper’s
joint configuration, applied contact forces, and a
screenshot of the scene are stored in a JSON-data
and PNG-image file, respectively.
By repeatedly following this procedure, Pren-
doSim obtains a collection of successful grasps and
provides a metric for grip stability based on the crit-
ical mass. This approach is agnostic to the gripper
type and target object.
3.3 Grippers and Objects
PrendoSim provides two types of grippers and a set of
three target objects with different shapes.
3.3.1 Grippers
The two built-in grippers consist of a two-finger,
parallel jaw gripper (Franka Emika gripper
6
), and
a three-digit gripper (BarrettHand BH8-series from
Barrett Technology
7
); both appear in Fig. 3. Each
gripper has a set of primitive shape colliders to de-
fine its physical shape. Unlike other simulators, we
use primitive shape colliders for improved computa-
tional efficiency as our simulator runs in real time (up
to 500 frames per second). Finally, we equip each
gripper with one physics material to describe the grip-
per’s contact-point friction parameters (Table 1).
The choice of these two grippers allows for a large
range of variability in the types of grasps that can
be generated. Parallel jaw grippers are particularly
favoured in industry as they offer a high degree of ro-
bustness, and only two opposite grasping points must
be selected to pick up an object. However, more
6
https://github.com/frankaemika
7
https://advanced.barrett.com/barretthand
Figure 3: Franka Emika (left) and BarrettHand grippers
(right) with highlighted primitive-shapes colliders (green
lines).
sophisticated behaviours, such as the distinction be-
tween precision and power grasps, are not possible.
In contrast, a multi-finger hand allows for more flex-
ibility in the choice of grasp. This higher complexity
comes at a cost of generally lower grasp robustness
and higher control effort.
The BarrettHand is a multi-fingered gripper with
a higher degree of dexterity that can grasp objects of
various sizes and shapes and at different orientations.
The three articulated fingers are composed of two in-
dependently moving joints with ranges of 140
◦
(finger
base joint) and 48
◦
(fingertip). They can each apply a
maximum force of 20 N at the fingertip. Two of the
fingers have a 180
◦
spread (mirrored joint) that allows
a change in grasp configuration, e.g., from cylindrical
grasp to spherical grasp. We obtain the open-hand
configuration from the kinematic description of the
BarrettHand when every finger is fully open. As for
the closed-hand configuration, we first load the grip-
per into Unity. Then, we set a capsule collider for
every digit of the gripper. The BarrettHand has three
fingers with two phalanges for each finger; therefore,
we obtain a total of six capsule colliders. Moreover,
we set a collider for the base of the gripper.
PrendoSim contains two built-in grippers, but it
is possible to include a new gripper by defining the
open-hand configuration and the colliders for each
of its digits, which will drive the kinematic gripper
throughout the closure movement.
3.3.2 Objects
There are presently three built-in objects in Pren-
doSim: a pair of scissors, a hammer, and a screw-
driver. We selected these models from the YCB
dataset (Calli et al., 2017), because they are famil-
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
64

iar to most people and offer different degrees of con-
straint difficulty for their intended use (Ortenzi et al.,
2020a). All objects are considered to be rigid, i.e.,
the blades of the scissors cannot open and close. We
divided each object into two functional areas: a tool
interface (grey area) and a grasp interface (red area)
(Fig. 4) (Osiurak et al., 2017). We accounted for ma-
terials, weight distribution, and friction separately on
both parts of each object (Table 2).
The pair of scissors present the most stringent con-
straints among the three tools. Although they have a
handle like a hammer and a screwdriver, this handle
requires the user to insert the fingers through the rings
to achieve the correct cutting motion. The blades must
enclose the material while an opening-and-closing
motion of the fingers performs the cut.
In particular, a hammer is designed to be grasped
by the handle (graspable side) and used by the head
(tool side). The handle is quite large, with respect to
the entire body, and can be grasped at any point. The
only constraint to its use is the head orientation with
respect to the object to pound. Thus, a hammer offers
loose constraints on the grasp.
Finally, the screwdriver is generally smaller than a
hammer, but the two structures are similar. The body
can be divided into two main functional areas: the
handle and the metallic rod. The handle is the gras-
pable part, and the metallic rod is the interface be-
tween the tool and the object to be tightened or loos-
ened with the screwdriver. A screwdriver presents
tighter constraints with respect to the hammer, as the
orientation of the rod has to match the approaching
direction of the screw, and the tip must be slightly in-
serted into the head of the screw.
Each object has a set of two specifically chosen
colliders that conform to the object’s shape as closely
as possible (Fig. 4). For the scissors, we have chosen
a concave mesh collider for the graspable side, which
more accurately wraps around the handle, leaving the
two holes as empty space. For the tool side of the
scissors, we have chosen a mesh collider. As for the
other two objects, a capsule collider was sufficient to
define the objects for accurate grasping.
PrendoSim additionally considers two, often ne-
glected, physical characteristics: weight distribution
and friction, for which appropriate values were se-
lected based on the material that made up each part
of the objects. These values are unique for each
target object, and they physically match their real-
world equivalents as closely as possible; however, a
few physics properties were globally set for all ob-
jects, i.e., angular and translational drag coefficients,
which were set to 0.05, Unity’s default setting. Unity
provides several collision detection algorithms, from
Figure 4: Geometry of the object colliders. Top: pair of
scissors in closed fixed position with a concave collider ap-
plied to the handle (graspable side) and a mesh collider ap-
plied to its tool side. Middle and bottom: Hammer and
screwdriver with two capsule colliders each; a capsule for
the tool side and another one for the graspable side. All
colliders are shown as green lines.
which we selected the “Continuous Dynamics” op-
tion, because it optimises the simulation while pre-
venting objects from intersecting one another.
Table 2 presents details about the physical char-
acteristics of each object deployed in the simulator.
Static and dynamic friction parameters match the real-
world equivalents based on the materials of each part
(tool or graspable interface) of the objects. We ob-
tained these coefficients from The Engineering Tool-
box
8
. The bounce coefficient was set to 0 for all ob-
jects to simulate perfectly plastic contacts, with no
rebound speed. Simulating grasps where the object
bounces around within the hand after contact is be-
yond the scope of PrendoSim.
3.4 User Interface
The user interface (UI) is a critical point of our grasp
generator. PrendoSim provides an easy-to-use UI,
which allows an effortless selection of the various op-
tions and parameters for the simulations. The UI has
three sections: Section A with major inputs (Fig. 5A);
section C with minor inputs (Fig. 5C); and section
B with the simulation screen (Fig. 5B). In section A,
users are prompted to type the key parameters for the
simulation, i.e., number of simulations, gripper type,
target object, and the directory path where the data
will be stored after the simulation. Each trial is shown
in the simulation screen in section B. This section ren-
ders the 3D model of both gripper and object, and it
shows the current grasp in real time. The user can
8
https://www.engineeringtoolbox.com/friction-
coefficients-d 778.html
PrendoSim: Proxy-Hand-Based Robot Grasp Generator
65
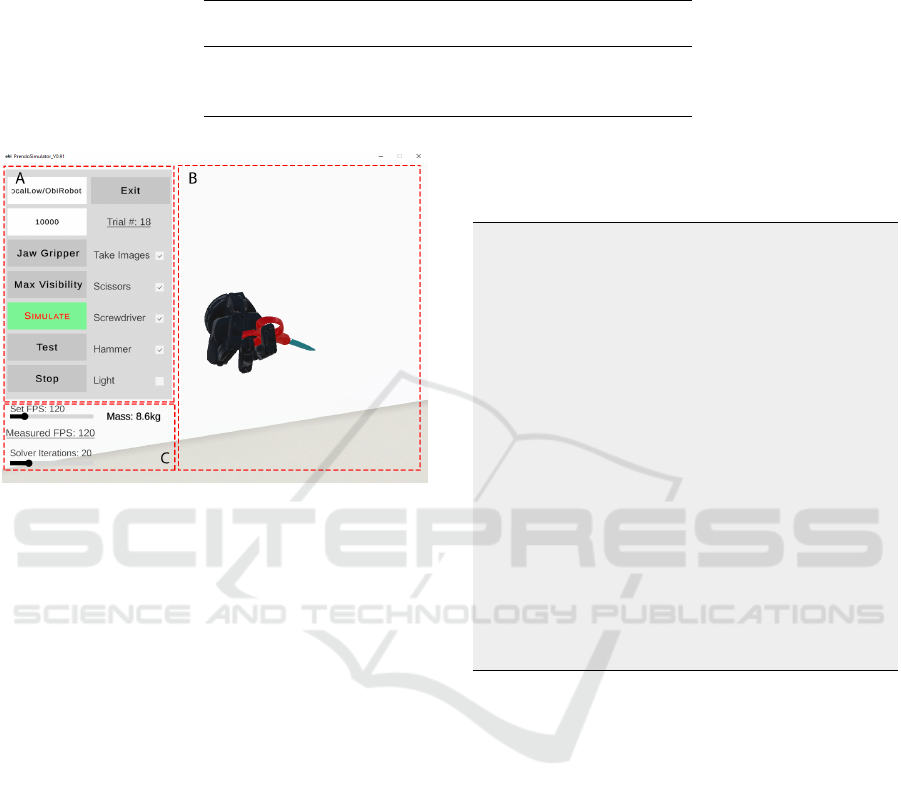
Table 2: Simulated mass (m), static friction parameter (π
s
), and kinetic friction parameter (π
k
) of the two functional areas
(Osiurak et al., 2017) of the three objects in PrendoSim. Friction coefficients µ
s
and µ
k
are calculated by averaging the friction
parameters of the gripper (shown in Table 1) and the object surface it is touching.
Handle Side Tool Side
Object m (g) π
s
π
k
m (g) π
s
π
k
Scissors 25 0.78 0.25 80 1.05 0.47
Hammer 70 0.40 0.65 280 0.50 0.30
Screwdriver 50 1.13 1.40 85 0.35 0.80
Figure 5: PrendoSim user interface, with A: user input
fields, B: 3D visual rendering of the simulation scene, and
C: physics engine adjustment fields.
visually confirm the gripper’s configuration and qual-
itatively evaluate the input parameters. The viewpoint
can be regulated via mouse. In section C the user can
further adjust simulation-related parameters such as
sampling rate and the number of physics solver itera-
tions. Moreover, a display shows the current weight
of the object when the algorithm executes point 6 of
our strategy, as described in Sec. 3.2.
3.5 Output
PrendoSim outputs the object category, camera pose,
and the gripper’s pose in a JSON file. We record
the condition as the target object involved in the sim-
ulation, for example “Screwdriver”. We record the
camera’s view angle onto the scene in world coordi-
nates (position and rotation in quaternions). Then we
record the gripper’s digit positions and rotation an-
gles in both local (relative to the gripper’s root) and
world coordinates. The same data is also recorded for
the target object. Finally we take note of the target
object’s categorical orientation, defined in four cate-
gories: up, down, pointing away from the hand, and
turned with respect to the tool interface. For example
in Fig. 6, the tool interface of the screwdriver is point-
ing away from the gripper; hence it has been labelled
as “pointing” in the output file, which format is shown
below:
{
" conditionInfo ": " S c r e w d r i v er " ,
" cameraPose " : [ posX , po sY , p osZ ,
ro tX , r otY , ro tZ , rot W " ] ,
" join t D a t a " : [
" Di g it_ 1 _j oint _ 1 , pos X , posY , po sZ ,
ro tX , r otY , ro tZ , rot W "
" Di g it_ 1 _j oint _ 2 , pos X , posY , po sZ ,
ro tX , r otY , ro tZ , rot W "
" D ig i t _ n _ j o i n t _ n , po sX , posY , p osZ ,
ro tX , r otY , ro tZ , rot W " ]
" root " : [ po sX , po sY , p osZ , ro tX , r otY
, rotZ , ro tW "] ,
" objec t P o s e " : [ " scr e w d ( Cl one ) ,
po sX , p osY , po sZ , rot X , rotY , ro tZ ,
ro tW "],
" categoricalDir " : [ " po i nting , rot X
, rotY , ro tZ , r otW " ]
}
Finally, in Fig. 7 we present a series of stable grasps
generated by PrendoSim. We report four grasps
per object to show qualitatively the variety of stable
grasps generated by PrendoSim. Interestingly, some
of the grasps are not human-like (see example grasp
1 for the scissor in Fig. 7) and could not have been
generated by following a human-inspired generation
process based on learning from demonstration.
4 DISCUSSION AND
CONCLUSION
We present a novel grasp generator that accounts for
dynamic properties of the gripper and the grasped ob-
ject, including static and dynamic friction, weight,
and weight distribution. PrendoSim is built on Unity’s
latest physics articulated-body component, and it
presents two built-in grippers (a parallel jaw gripper
and a three-finger hand) and three built-in objects (a
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
66

Figure 6: BarrettHand successfully grasping a screwdriver
pointing away from the gripper.
Figure 7: Four examples of grasps for each of the target ob-
jects (a pair of scissors, a hammer, a screwdriver) arranged
in columns.
pair of scissors, a hammer, and a screwdriver). Pren-
doSim utilises the proxy-hand method to compute
forces at the contacts and provide an operational defi-
nition of grasp stability. The intuitive interface allows
the user to easily set up the simulations.
PrendoSim has the great advantage of describ-
ing objects realistically, allowing non-uniform mate-
rials by defining areas with different dynamic prop-
erties. Moreover, it is easy to use, open source and
downloadable for free from the following URL: https:
//prendosim.github.io. We believe that it can be ex-
tended to VR simulation with haptic rendering con-
sidered a god-object (Dworkin and Zeltzer, 1993) that
retains information about contact with objects (Zilles
and Salisbury, 1995).
PrendoSim has a few limitations and room for im-
provement. At the moment, a gripper configuration
is considered successful if the object remains in the
grasp after the hand first closes on it with a moder-
ate grasp force. We are planning to add more grasp
stability measures, such as force closure, in order to
enable a wider validation of the results. The addi-
tion of further objects and grippers would give an even
wider range of variation to the simulations. Currently,
such additions are possible by directly working on the
files in the open-source project of PrendoSim. While
the consideration of parameters such as friction and
weight distribution has reduced the gap between sim-
ulation and the real world, we are also planning to
replicate the grasps generated by PrendoSim on a real
robot in order to more thoroughly verify its output.
To enable more advanced image analysis, such as
3D image reconstruction or deep learning, our simu-
lator could be extended to include depth-imaging or
multi-camera functionalities by adding more cameras
in the scene in Unity, which is currently possible with
the provided open-source project.
One of the problems with the proxy-hand method,
which has been highlighted in haptic rendering, is that
the simulated objects are rigid; thus, they have only
point contacts. This is a problem especially in hu-
man hand simulations, where contact areas are gen-
erally wider considering the soft deformations of the
fingertips. Contact area simulations can be added to
improve realism of contact dynamics, for example to
add point torques as in (Talvas et al., 2013).
We believe that PrendoSim is a tool that can bene-
fit multiple communities, as its applications span from
the development of grasp algorithms, to the recording
of grasp datasets, to the development of VR applica-
tions and human-subject experiments.
ACKNOWLEDGMENTS
This work was supported by the UK Engineering and
Physical Sciences Research Council (EPSRC) grant
EP/L016516/1 and by the Biotechnology and Bio-
logical Sciences Research Council (BBSRC) grant
PrendoSim: Proxy-Hand-Based Robot Grasp Generator
67

BB/R003971/1 for the University of Birmingham.
This work was partially supported by the Deutsche
Forschungsgemeinschaft (DFG, German Research
Foundation) under Germany’s Excellence Strategy –
EXC 2120/1 – 390831618.
REFERENCES
Adjigble, M., Marturi, N., Ortenzi, V., Rajasekaran, V.,
Corke, P., and Stolkin, R. (2018). Model-free
and learning-free grasping by local contact moment
matching. In Proceedings of the 2018 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS), pages 2933–2940, Madrid, Spain.
Ajoudani, A., Zanchettin, A. M., Ivaldi, S., Albu-Sch
¨
affer,
A., Kosuge, K., and Khatib, O. (2017). Progress
and prospects of the human-robot collaboration. Au-
tonomous Robots.
Bekiroglu, Y., Marturi, N., Roa, M. A., Adjigble, K. J. M.,
Pardi, T., Grimm, C., Balasubramanian, R., Hang, K.,
and Stolkin, R. (2020). Benchmarking protocol for
grasp planning algorithms. IEEE Robotics and Au-
tomation Letters, 5(2):315–322.
Berceanu, C. and Tarnita, D. (2012). Mechanical design and
control issues of a dexterous robotic hand. Advanced
Materials Research, 463-464:1268–1271.
Bicchi, A. and Kumar, V. (2000). Robotic grasping and
contact: a review. In Proceedings of the IEEE In-
ternational Conference on Robotics and Automation
(ICRA), volume 1, pages 348–353.
Borst, C. and Indugula, A. (2005). Realistic virtual grasp-
ing. In Proceedings of the IEEE Conference on Virtual
Reality (VR), pages 91–320, Bonn, Germany.
Calli, B., Singh, A., Bruce, J., Walsman, A., Konolige, K.,
Srinivasa, S., Abbeel, P., and Dollar, A. M. (2017).
Yale-CMU-Berkeley dataset for robotic manipulation
research. The International Journal of Robotics Re-
search, 36(3):261–268.
Ding, D., Lee, Y.-H., and Wang, S. (2001). Computation
of 3-D form-closure grasps. IEEE Transactions on
Robotics and Automation, 17(4):515–522.
Dworkin, P. and Zeltzer, D. (1993). A new model for ef-
ficient dynamic simulation. In Proceedings of the
Fourth Eurographics Workshop on Animation and
Simulation, pages 135–147.
Ferrari, C. and Canny, J. (1992). Planning optimal grasps.
In Proceedings of the IEEE International Conference
on Robotics and Automation, volume 3, pages 2290–
2295.
Gualtieri, M., ten Pas, A., Saenko, K., and Platt, R. (2016).
High precision grasp pose detection in dense clutter.
In Proceedings of the IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
598–605.
H
¨
oll, M., Oberweger, M., Arth, C., and Lepetit, V. (2018).
Efficient physics-based implementation for realistic
hand-object interaction in virtual reality. In Proceed-
ings of the IEEE Conference on Virtual Reality and
3D User Interfaces (VR), pages 175–182.
Honarpardaz, M., Tarkian, M.,
¨
Olvander, J., and Feng, X.
(2017). Finger design automation for industrial robot
grippers: A review. Robotics and Autonomous Sys-
tems, 87:104 – 119.
Levine, S., Pastor, P., Krizhevsky, A., Ibarz, J., and Quillen,
D. (2018). Learning hand-eye coordination for robotic
grasping with deep learning and large-scale data col-
lection. The International Journal of Robotics Re-
search, 37(4-5):421–436.
Miller, A. T. and Allen, P. K. (2004). GraspIt! a versa-
tile simulator for robotic grasping. IEEE Robotics Au-
tomation Magazine, 11(4):110–122.
Nguyen, V.-D. (1988). Constructing force- closure grasps.
The International Journal of Robotics Research,
7(3):3–16.
Nguyenle, T., Verdoja, F., Abu-Dakka, F., and Kyrki, V.
(2021). Probabilistic surface friction estimation based
on visual and haptic measurements. IEEE Robotics
and Automation Letters, pages 1–8.
Ortenzi, V., Cini, F., Pardi, T., Marturi, N., Stolkin, R.,
Corke, P., and Controzzi, M. (2020a). The grasp strat-
egy of a robot passer influences performance and qual-
ity of the robot-human object handover. Frontiers in
Robotics and AI, 7:138.
Ortenzi, V., Controzzi, M., Cini, F., Leitner, J., Bianchi, M.,
Roa, M. A., and Corke, P. (2019). Robotic manipula-
tion and the role of the task in the metric of success.
Nature Machine Intelligence, 1(8):340–346.
Ortenzi, V., Cosgun, A., Pardi, T., Chan, W., Croft, E., and
Kulic, D. (2020b). Object handovers: a review for
robotics. arXiv.
Osiurak, F., Rossetti, Y., and Badets, A. (2017). What is an
affordance? 40 years later. Neuroscience & Biobehav-
ioral Reviews, 77:403–417.
Talvas, A., Marchal, M., and L
´
ecuyer, A. (2013). The god-
finger method for improving 3d interaction with vir-
tual objects through simulation of contact area. In
Proceedings of the IEEE Symposium on 3D User In-
terfaces (3DUI), pages 111–114.
Vahrenkamp, N., Kr
¨
ohnert, M., Ulbrich, S., Asfour, T.,
Metta, G., Dillmann, R., and Sandini, G. (2012).
Simox: A robotics toolbox for simulation, motion and
grasp planning. In International Conference on Intel-
ligent Autonomous Systems (IAS), pages 585–594.
Zilles, C. B. and Salisbury, J. K. (1995). A constraint-based
god-object method for haptic display. In Proceedings
of the IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS), volume 3, pages
146–151.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
68
