
Empirical Evaluation of a Novel Lane Marking Type for Camera and
LiDAR Lane Detection
Sven Eckelmann
1
, Toralf Trautmann
2
, Xinyu Zhang
1
and Oliver Michler
1
1
Institute of Traffic Telematics, Technical University Dresden, Dresden, Germany
2
Mechatronics Department, University of Applied Science Dresden, Dresden, Germany
Keywords:
LiDAR, Point Clouds, Retro Reflecting, Lane Marking, 3M, Camera.
Abstract:
Highly automated driving requires a zero-error interpretation of the current vehicle environment utilizing state
of the art environmental perception based on camera and Light Detection And Ranging (LiDAR) sensors. An
essential element of this perception is the detection of lane markings, e.g. for lane departure warnings. In this
work, we empirically evaluate a novel kind of lane marking, which enhances the contrast (artificial light-dark
boundary) for cameras and 3D retro reflective elements guarantee a better reflection for light beams from a
LiDAR. Thus intensity of point data from LiDAR is regarded directly as a feature for lane segmentation.
In addition, the 3D lane information from a 2D camera is estimated using the intrinsic and extrinsic camera
parameters and the lane width. In the frame of this paper, we present the comparison between the detection
based on camera and LiDAR as well as the comparison between conventional and the new lane marking in
order to improve the reliability of lane detection for different sensors. As a result, we are able to demonstrate
that the track can be detected safely with the LiDAR and the new lane marking.
1 INTRODUCTION
Highly automated driving requires a zero-error inter-
pretation of the current environment. Camera, radar,
ultrasound and LiDAR sensors are primarily utilized
for environmental perception and the detection of ob-
jects. In order to increase the reliability of said sen-
sors, competing and cooperative fusion approaches
can be applied. At the same time, the determina-
tion of the current position based on Global Naviga-
tion Satellite System (GNSS) sensors in combination
with vehicle data, such as velocity, rotational speed of
wheel and yaw rates is indispensable.
A precise information about the course of the lane is
an essential prerequisite for driver assistance systems
and autonomous driving and can further be used to
support global positioning. Besides the comfortable
lateral guidance, it serves as a reference point for fur-
ther driving maneuvers such as lane change assistance
or the calculation of alternative trajectories. Lane de-
tection based on camera information has already been
sufficiently handled and represents the current state of
the art. Next to these conventional image processing
algorithms, new approaches of machine learning are
adopted. However, the basis for these types of eval-
uation strategies is the 2D camera, so that the 3D in-
formation are estimated by the intrinsic and extrinsic
camera parameters as well as the known lane width.
This estimation is accompanied by numerous false de-
tection. Examples are glare, bitumen joints or other
elements that create a similar contrast in the image
(Koch et al., 2015).
1.1 Related Works
1.1.1 LiDAR Lane Detection
In literature, several approaches have been proposed
using LiDAR as an input for lane detection. In
(Kammel and Pitzer, 2008) the disadvantage of low
resolution is compensated by increased subsequent
scans, registered and accumulated employing GNSS
and Inertial Measurement Unit (IMU) information.
The authors in (Hata and Wolf, 2014) used a modi-
fied Otsu thresholding method and were able to detect
lanes and any kind of road painting. In (Kodagoda
et al., 2006) a sensor fusion algorithm to fuse images
from camera and scanning laser radar (LADAR) is
used to identify curbs. For this task, the solution pre-
sented in this paper used nonlinear Markov switch-
ing. The authors in (Kumar et al., 2013) extracted the
lane lines by developing an algorithm that combines
Eckelmann, S., Trautmann, T., Zhang, X. and Michler, O.
Empirical Evaluation of a Novel Lane Marking Type for Camera and LiDAR Lane Detection.
DOI: 10.5220/0010550500690077
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 69-77
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
69

both Gradient Vector Flow (GVF) and Balloon Para-
metric Active Contour models. This technique was
not very accurate to detect lanes at the edges of the
road and the lane predicted interfered with the road
curbs. The same author published a lane detection
algorithm (Kumar et al., 2014) based on an inten-
sity threshold as well as Region Of Interest (ROI) to
limit the number of processed LiDAR data. Subse-
quently, the data was converted to a 2D image, with
a linear dilation to complete rubbed off lanes. The
algorithm was tested over 93 roads and managed to
detect the markings in 80 roads. The authors claimed
that the failures in detecting all the test roads was due
to road wipings and erosion, causing small intensi-
ties and low densities to be received by the LiDAR.
In (Guan et al., 2014) the point cloud is segmented
into horizontal blocks. These blocks are then used
to detect the edges (road curbs) based on differences
in elevation in order to determine the surface as well
as the road boundaries. The authors claim to accom-
plish a success of 0.83 of correctness to detect lane
markings. In (Thuy and Le
´
on, 2010) the authors de-
veloped a lane marking detection algorithm based on
a dynamic threshold. First, the data points received
from the LiDAR is processed using Probability Den-
sity Function (pdf), and the maximum reflectively is
matched with the highest values of the pdf. The dy-
namic threshold is applied to this reflectively data,
since the lane markings are the ones that return high
reflectively (due to their color gradient). The author
of (Yan et al., 2016) transformed the segmented points
into scan lines based on scanner angle. Consequently,
the road data is determined based on a ”Height Dif-
ference” (HD). The road limits have been identified
with a moving least square, that only accepts certain
points that lie in a certain threshold set by the authors.
Besides a classification on intensity values, the au-
thors proposed using an ”Edge Detection and Edge
Constraints” (EDEC) technique that detects fluctua-
tions in the intensity. This method should minimize
the noise in the detected lanes. The algorithm was
tested on data from Jincheng highway China, the au-
thors claim that they have accomplished an accuracy
level of 0.9.
1.1.2 Camera Lane Detection
Camera based lane marking detection research is a
main research field and currently heavily studied.
Therefore in this section, only a brief overview of re-
lated works is provided. The lane detection algorithm
in (Mu and Ma, 2014) converts the raw images to grey
scale and applies a Otsu’s method for thresholding the
image. Sobel is used to detect the lane markings. The
results shows that it is effective for incomplete lane
markings and for fluctuations in the environment’s il-
lumination. (Li et al., 2014) uses Canny edge detec-
tion technique which results in a binary image. Then
Hough transform is implemented in order to detect the
straight lines from the image. In contrast, the author
of (Haque et al., 2019) uses thresholding based on
gradients and the HLS color space. Followed by the
perspective transformation they apply a sliding win-
dow algorithms. The centroids of the windows a fi-
nally composed to a lane.
1.2 Our Approach
For the approach presented in this paper, we tackle
the main problem where lane detection in urban areas
often fails, since the curving of the lane runs out of
the scope from the camera. In addition most of the
algorithms are mostly designed for straight lanes and
not for sharp curves. Thus a reliable lane information,
one of the basics for autonomous driving, is not guar-
anteed. In this paper we use a new type of lane mark-
ing which was developed by 3M (3M, 2021). This
lane marking enhances the contrast (artificial light-
dark boundary) for camera systems and the reflecting
of light beam from a LiDAR with 3D arranged retro
reflective elements. The intensities of the point data
can directly be used as a feature for the segmenta-
tion. Complex filters are not required to extract the
information from the lane marking and misinterpre-
tations are minimized. With transferring the LiDAR
points into the 2D area, the lanes are then extracted
through dynamic horizontal and vertical sliding win-
dows, which finally leads to the relevant points. For a
better comparison we take the raw points into account
and will not apply any filters for a smooth represen-
tation. It will also provide a comparison between the
detection based on camera and LiDAR. All the mea-
surements are done on the test field of the University
of Applied Science (HTW) Dresden. Since only one
lane is equipped with this new lane marker, a compar-
ison to the conventional lane marking can be given.
2 FUNDAMENTALS
2.1 LiDAR
A LiDAR emits infrared coherent light from a laser to
its environment. The energy is decisive for the clas-
sification of the sensor into the protective classes and
results from the integral of the pulse over time. Due to
the optics of the LiDAR, the light beam diverges and
spreads flat, depending on the distance. This means
that less light power is radiated onto the object in a
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
70

further distance. In addition particles in the atmo-
sphere, like dust, fog and rain cause diffuse reflec-
tions and absorb energy from the ray. Furthermore,
the surface of the object influences the reflected en-
ergy. Physical properties like total and diffuse reflec-
tion along with the kind of color have a significant
impingement. In contrast to the source of the LiDAR,
the light beam is reflected from the object with a full
solid angle and is significantly attenuated by the scat-
tering of infrared light. After all, the sensitivity and
surface size of the receiver influence the result of the
detection (Wagner et al., 2003).
The transmittance of the LiDAR is the quotient be-
tween the transmitted and the received light output.
This value is colloquially known as intensity. In or-
der to minimize the influence of attenuation by the
atmosphere, the transmission power can be increased
or the beam can be bundled more stronger. Another
approach is to change the composition of the object
color. Therefore BASF Coatings announced a new
technology called cool colors or cool coatings (Coat-
ings, 2016). This technology replaces a high propor-
tion of ash in the paint and can reflect energy better. In
addition to the cooler interior in the vehicle, LiDAR
beams are also better reflected. The distance d to an
object is calculated by the speed of light c and half of
the appertaining run time t:
d = c
o
·t/2 (1)
In summery, the LiDAR is the sensor with the high-
est accuracy, but with increasing distance and the re-
sulting minimization of the object-relevant back scat-
ter pulse, the reliability and integrity of object detec-
tion reduces. At the same time, object properties such
as surface texture, defined in color and gloss, relative
orientation and atmospheric properties affect the back
scatter intensity of the LiDAR.
2.2 Lane Markings
The examined novel type of lane marker tapes (3M,
2021) (Figure 1) have retro reflective characteristics,
which are achieved by embedding glass beads. Inci-
dent light in this direction is scattered directly back.
The black stripe increases the contrast to the white
lane marking and therefore provides a defined con-
trast. This is particularly helpful on light surfaces,
such as concrete. With the tall design, better visibil-
ity in rain and snow should be achieved. Originally,
they were developed to improve recognition by hu-
man drivers or a camera.
The visibility in daylight as well as the retro re-
flective properties are defined by the Luminance Co-
efficient Q
d
or R
L
2, which is the quotient of Lumi-
ance Density L
V
[
cd
/m
2
] and Illumiance E
V
[lx].
Figure 1: Left: Standard Lane Marking Right: Retro reflec-
tive lane marking tape of 3M (3M, 2021) with embedded
glass beads.
R
L
=
L
V
E
V
[
mcd
m
2
lx
] (2)
R
L
is defined in EN 1436, 2007 which defines mini-
mum Luminance Coefficents in different classes de-
pending on the color of the road marking, the kind
of surface (alphalt or concrete) and the dampness. In
addition to the new markings on the outer lane, the
conventional markings are applied to the center lane
and the inner lane on the test field. The retro reflective
marking has a seven times higher Luminance Coeffi-
cient of R
L
3M
= 352 comparing to the conventional
lane marking of R
L
conv
= 50.
3 EXPERIMENTAL SETUP
3.1 Vehicle
For the investigations a BMW i3 is used as test vehi-
cle. Additional information like vehicle speed, steer-
ing angle and wheel speed are directly provided from
the car via a CAN interface. All information are cap-
tured by a mini PC over Ethernet and uniquely time
stamped. Thus it is possible to play back the data at a
later time and to optimize the implemented algorithm.
3.2 LiDAR
For the approach, the LiDAR system Ouster OS1 is
used. With a range of 120 m, a 360
◦
horizontal field
of view and a given angular resolution of 0.1
◦
as well
as a
+
/- 22.5
◦
vertical field of view divided into 64
levels, it generates up to 1.310.720 points per second
with a sampling frequency of 20Hz (Ouster, 2014).
The LiDAR is mounted at a height of 1.8 m. Figure 2
shows the point data from the LiDAR of a measure-
ment.
The LiDAR as well as a GNSS receiver is
mounted on a mobile platform, which can easily be
adapted to the roof of different vehicles.
Empirical Evaluation of a Novel Lane Marking Type for Camera and LiDAR Lane Detection
71
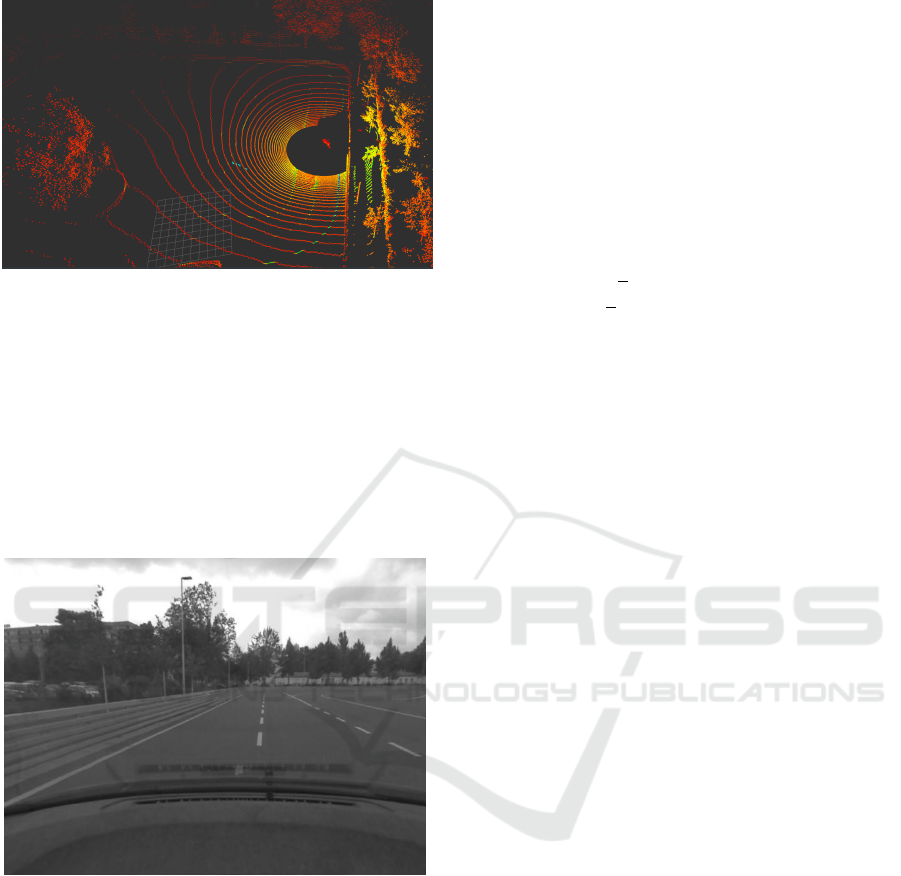
Figure 2: Recorded point cloud of a straight street on the
reference track with a LiDAR sensor. The outer line is
equipped with the retro reflecting lane from 3M.
3.3 Camera
In addition, a camera-based lane marking detection is
evaluated. The camera used in this work is a grey
scale camera (Axis M3114-R) with a resolution of
640x480 pixels. It is mounted in the center of wind-
shield, close to the roof. A sample of the camera’s
raw image is shown in figure 3.
Figure 3: Rectified gray scale image frame of AXIS
M3114-R (640x480).
3.4 Reference Positioning System
In order to provide a geo-reference as well as a quan-
titative comparison between the examined lane de-
tection methods, the current position of the vehicle
must be determined as precisely as possible. For this,
an u-blox multi-constellation GNSS receiver (ublox,
2017) is utilized to estimate the current global po-
sition. They include already integrated fusion algo-
rithm to countervail the current GNSS error. In our
case we use the automotive and static setting to en-
courage a low deviation and thus a reliable position.
In addition we combine the output from the GNSS
modules with information provided by the vehicle
CAN bus system, which are the current vehicular ve-
locity v and the yaw rate ψ. The absolute position x,y
and the heading of the vehicle Θ are calculated by an
Extended Kalman Filter (EKF). The state vector x
ctrv
of the fusion model is described in 3. For the applied
prediction motion model we use a Constant Turn Rate
and Velocity (CTRV) model (equation 4) described in
(Obst et al., 2015).
x
ctrv
= (x,y, Θ,v,ψ) (3)
x
k+1
= x
k
+
v
ψ
∗ (sin(Θ + ψ ∗ T ) − sin(Θ))
v
ψ
∗ (−cos(Θ + ψ ∗ T ) + cos(Θ))
Θ ∗ ψ ∗ T
0
0
(4)
3.5 Test Field with Reference Track
The equipped and examined track (figure 4) is part of
the test field from the University of Applied Science
located in Dresden, Germany. It has a dimension of
approximately 50 m by 70 m. Contrary to common
available data, like Open Street Map (OSM), the test
field is geodetically surveyed with an high accuracy.
In addition we are able to map lanes, intersections and
we are able to set geographical referenced markers.
The red coordinate system depicted in figure 4 repre-
sents the origin point of the local map. The surveyed
data acquisition includes a complete lap around the
outer test track. In addition to the LiDAR data, the
data set also contains the relative position in relation
to our coordinate origin (red) and raw camera data.
4 DATA PROCESSING
4.1 Camera Lane Detection
The whole workflow is given in figure 5. After recti-
fying the raw image in the first step, we set the ROI
from the lower edge of the windshield up to the hori-
zon, which is approximately the half of the image. In
this ROI we improved the contrast and minimized the
influence of ambient lighting by taking the histogram
of this region in account.
A Canny edge detector followed by an morpho-
logical operation for closing unfilled regions converts
the gray image to a binary. Finally we crop the im-
age again by setting vertices of a trapezoid to reduce
the influence of obstacles in the edge area. Up next,
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
72

Figure 4: Reference track on the test field. The red frame
represents the local coordinate system. The retro reflecting
lane marking is only applied to the outer lane.
Figure 5: Workflow of the camera lane detection.
we perform a perspective transformation, which re-
sults in a bird eye view image (figure 6, Center). This
image is the starting point for the lane detection algo-
rithm. Therefore, we are using a sliding window start-
ing from the lower left corner and moving horizontal
to the end of the image. In each window we are us-
ing convolution to detect the maximum of white pix-
els. By passing a threshold, the position of the max-
imum convolution becomes a valid point of the lane,
which we name centroid. Once we find a centroid we
start going vertical in the image. Simultaneously we
use the orientation of the centroid to define the next
vertical window position. This vertical iteration ends,
once we find no valid point and then start over from
the last horizontal position. The algorithm ends once
we reached the right side of the image. As result we
get the relevant points of the lanes in the bird’s eye
perspective. Finally we can augment our centroids
into the rectified image (figure 6, Right).
Figure 6: Examples of the camera lane detection. Left:
Original rectified image. Center: Binary image in bird eye’s
view. The yellow points represents the segmented points
and the blue points (centroids) are extracted by the sliding
window algorithm. Right: The segmentation (yellow) and
the centroids (blue) are augmented in the rectified image.
4.2 LiDAR Lane Detection
The entire workflow for LiDAR lane detection is
given in Figure 7.
Figure 7: Workflow of the LiDAR lane detection.
We process the raw point cloud data from the
LiDAR and start down sampling with a Voxel Fil-
ter and a leaf size of 0.2. We crop the point cloud
to predefined ROI and focus on the relevant area in
front of the vehicle. A Random Sample Consensus
(RANSAC) is used to extract the roadway (cf. fig-
ure 8, left image). Since the intensity value decreases
over the distance, we normalize and adjust that value
with a linear function. Finally we set a threshold, ex-
tract the remaining lane points and convert these to an
image. At this point we can use the same approach to
extract the lanes with a sliding window as described
in section 4.1. Finally we convert the lane points back
from the image plane to the vehicle coordinate sys-
tem and create optional a second degree polynomial
(cf. figure 8, right image).
5 RESULTS
Out of the approximated lane points and our current
known position (cf. section 3.4), we can transform
each point of our detection algorithm into the global
coordinate system, which is exemplary depicted in
figure 9.
Since our test field and all lanes are geodetically
surveyed we are able to compare the results with the
ground truth. For evaluation and comparison, the
Empirical Evaluation of a Novel Lane Marking Type for Camera and LiDAR Lane Detection
73

Figure 8: Examples for LiDAR Lane Detection. Form Left
to Right: Extracted roadway as top view image; Segmented
Lane with adjusted Intensity threshold; Extracting relevant
lane points with sliding window algorithm; Fitted points
(purple) with second degree polynomial.
Figure 9: Transformed lanes into the global coordinate sys-
tem. The ground truth is represented by the 3M -, Center-
and Inner Lane and the black cross marks the current car
position. The colored points represent the centroids of the
detected lanes. The values of the Camera and Lidar detected
lanes specify the Root Mean Square Error (RMSE) from the
ground truth.
maximum length of the lane l
Lane
, the deviation from
the ground truth RMSE and the fail rate f
f
(cf. equa-
tion 5) are assessed. The length l
Lane
is defined as
the distance from the center point of the car up to
the farthest detected point. For calculating f
f
we de-
fine that all lanes which have an higher deviation than
RMSE
max
count as not detected n
f
alse. Since we
have the same sample rate of our LiDAR and camera,
we also count the number of frames where no lane
was detected n
not
. Based on the evaluation of the test
drive, RMSE
max
is set to 1.5 m.
RMSE
Lane
=
s
1
n
Σ
n
i=1
d
i
− f
i
σ
i
2
(5)
f
f
=
n
not
+ n
f alse
n
f rames
(6)
n
f alse
=
∑
Frames
n=0
(RMSE
Lane
n
> RMSE
max
)
(7)
5.1 Camera Lane Detection
The 3M marking can be used to examine if the con-
trast strip allows a better detection compared to con-
ventional lane markings. Figure 11 shows the devia-
tion from the ground truth for each lane and allows us
to make the following statements:
• Camera Fails in Curves: Especially in narrow
curves the lanes are running out of the cameras
field of view. A detection of an inner lane mark-
ing is very unlikely. Only center and outer lane
markings could be detected. Due to the structure
of our text field, there is a crash barrier near the
outer lane, which leads additionally to an incor-
rect detection.
• Incorrectly Assigned Lanes: The assignment of
each lane to the ground truth is done by calculat-
ing the RMSE of each point to the ground truth.
In that case, the course of the lane approaches the
other reference track (cf. figure 10). As a result,
the lanes were assigned incorrectly (cf. figure 11
at A).
• Low Deviation on Straight Lanes: In regions of
straight lanes the RMSE is lower than 1.0m.
• Uncertainty Due to Position Determination: In
B of figure 11 the car did not move along the cen-
ter line. Additionally the uncertainty of the posi-
tion determination caused a higher RMSE and a
false detection.
The error rate of the 3M marking is between the mid-
dle and inner lane. At this point we cannot assess
whether the 3M marking improves the lane detection,
since the inner lane runs out of the field of view while
passing curves and the crash barriers often causes a
false detection. Furthermore, the roadway on the test
field is already very dark, so that only a minimal im-
provement in the contrast can be achieved.
Figure 10: Error due transforming the points from the cam-
era coordinate system into the global coordinate system.
5.2 LiDAR Lane Detection
As already mentioned, the LiDAR lane detection only
takes the retro reflecting lane markings into account.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
74

Figure 11: Left: RMSE from each lane to the ground truth.
None colored regions are areas there the algorithm didn’t
detect any valid lane points n
f alse
.Right: Represents the fail
rate of the camera detection on each lane.
Thus, only the outer lane can be evaluated. Based on
figure (12) we can point out the following statements:
• Low Fail Rate: The false detection is equally dis-
tributed on the whole track. In region A of fig-
ure 12 the detection fails because the segmenta-
tion returns a high intensity due to retro reflecting
objects. The overall fail rate is f
f
Lidar
= 7.94%
• Correctly Assigned Lanes: The extracted lane
points were assigned to the outer lane in each
frame.
• Low Deviation: The deviation along the whole
track is below 1 m. It only raises at regions where
the segmentation process failed due of high inten-
sity obstacles.
Figure 12: Lidar Lane Detection - Left: RMSE of the 3M
lane to the ground truth. None colored regions are areas
where the algorithm was not able to detect any valid lane
points n
f alse
. Right: Fail rate of the LiDAR lane detection
on each lane.
5.3 Comparison of LiDAR and Camera
Figure 13 shows the length of the detected lanes. The
maximum of the LiDAR and thus the prediction hori-
zon is l
Lane
Lidar
= 30m, compared to the camera with
l
Lane
Camera
= 16m. The lower installation position of
the camera, creates a higher perspective distortion.
Therefore, the area of the image, which represents the
roadway and the lanes is smaller. That leads to the
fact, that only few points in a smaller area can be used
for subsequent processing. In addition the transfor-
mation from birds-eye-view to real coordinates fails
in narrow curves, which leads to a wrong assignment
of the lane (figure 10). Currently, only the camera is
Table 1: Final results of the comparison between the LiDAR
and camera lane detection.
LiDAR Camera
Max Length of Lane [m] 31 16
Fail Rate of Conventional
Lane Marking [%]
– 22,26
Fail Rate of 3M Lane
Marking [%]
7.9 22,68
Average RMSE of
Conventional
Lane Marking [m]
– 0.86
Average RMSE of 3M
Lane Marking [m]
0.76 0.88
able to detect multiple lanes. If we define the error
rate in such a way, that at least one marking has to
be recognized, the fail rate drops to 1%. The LiDAR
is mounted on the roof of the car and already pro-
vides 3D data. So any perspective transformation
steps do not need to be performed. The resolution of
the LiDAR based on the design of the LiDAR system.
In relation to our LiDAR, the vertical field of view is
divided into 64 layers. The blind areas between the
layers increases with the distance. As result, fewer
points in the lane are recorded and changes in between
can not be perceived. That also leads to the fact the
the maximum length, and thus the prediction horizon
depends on the visibility of each specific layer. Com-
pared to this, the camera has a fixed and usually a
higher resolution. In subject to the condition that the
whole marking is visible, changes in the course of the
trajectory can be better recognized.
Figure 13: Length of Lane Detection - Left: Lidar Right:
Camera.
Concluding, table 1 provides a comprehensive
overview of all quantitative results.
6 CONCLUSION AND FUTURE
WORKS
In this paper we compared a new type of lane mark-
ing (3M, 2021) using a LiDAR(Ouster OS1 (Ouster,
2014)) sensor with a camera-based lane detection.
With varieties in data processing steps and coordinate
Empirical Evaluation of a Novel Lane Marking Type for Camera and LiDAR Lane Detection
75
transformations, the same lane detection algorithm is
applied for both sensors. The paper shows that the
new lane marking together with the LiDAR gives the
best results. The length of the predicted lane is two
times higher and the fail rate is less than one third
of the camera. It also shows, due the cameras lim-
ited field of view, narrow curves can not be detected
as well. The new lane marking did not improve the
detection algorithm of the camera at all. This is ba-
sically due to the already dark pavement of the test
field. For future work, we will invest more research
in the following topics.
• Various Undergrounds: Evaluating the influ-
ence of the contrast stripe on brighter roadways
like concrete.
• Various Weather Condition: Since the new lane
marking has certain height, questions like how
rain and snow influences the detection should be
evaluated.
• Night Vision: It needs to be evaluated if the retro
reflecting influences the night visibility for the
camera detection.
• Combine with V2X Technology: A Road Side
Unit (RSU) could provide the information, if a
lane is equipped with this special feature. Under
the condition a vehicle is equipped with a LiDAR,
the detection of the lane could be supported and
serve as a prerequisite for highly automated driv-
ing.
• Sensor Fusion: A sensor fusion of camera and
LiDAR would increase the reliability of the lane
detection
Since 2020 where is new version of the 3M lane
marking on the market. We are looking forward to
equipped also the inner lane, which enables us to
compare the three variants.
Besides lane marking, pole feature has seen a
tremendous interest amongst research community in
recent years because of their ubiquity on the urban
street and stability under different weather and light
conditions. It appears normally as part of street light,
traffic lights and trees. In a future work we will
present a new pole detection method, combining high
retro reflective foils and LiDAR, which enables the
calculation of lateral and longitudinal relative posi-
tion of the vehicle. The test field is already equipped
with nine traffic lights, which provides an excellent
basis for this investigation.
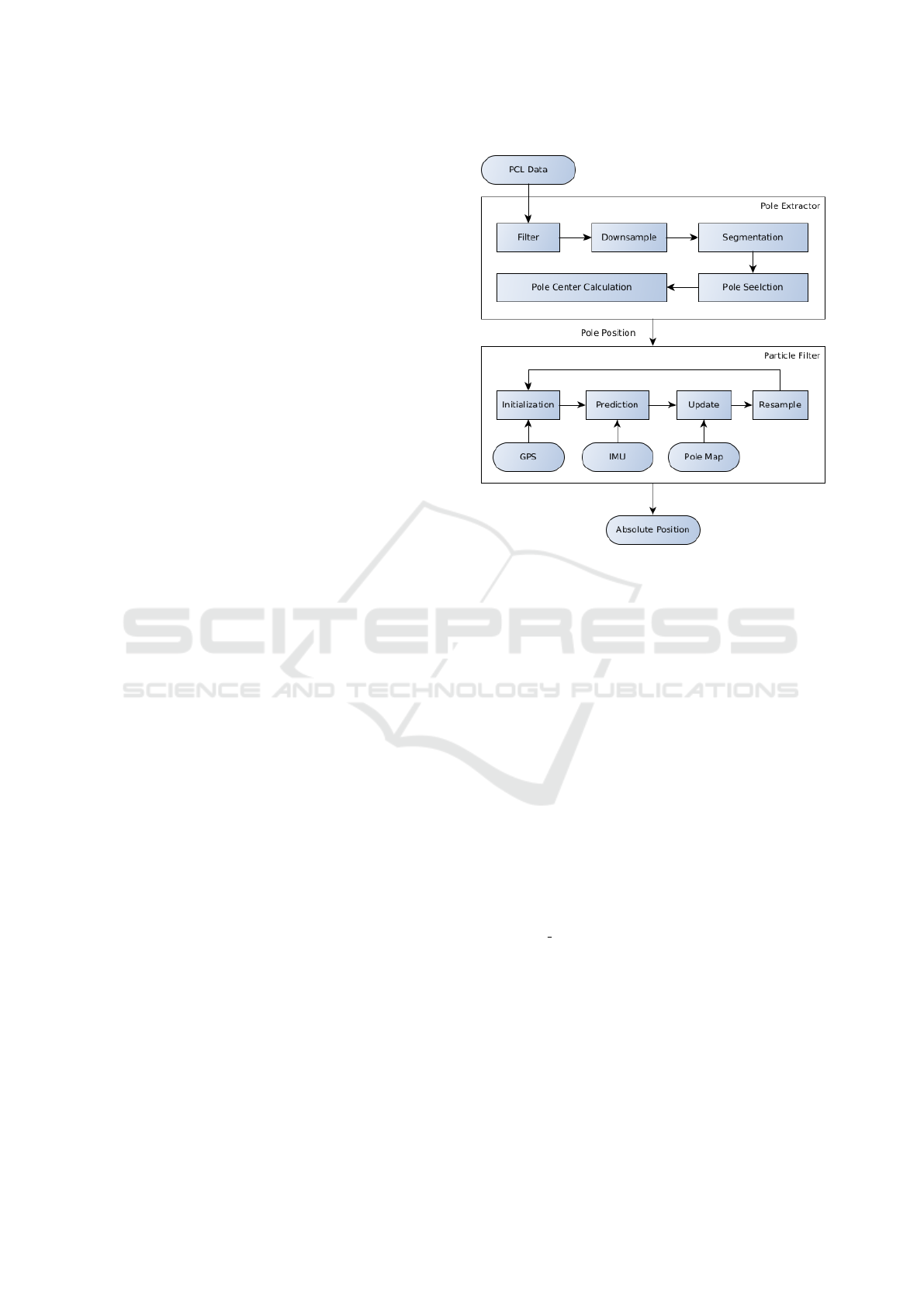
Figure 14 shows the flow chart for the localization
process based on pole feature. It is divided in a Pole
Extractor and Particle Filter. After filtering, down
sampling and segmentation, the point cloud data is
Figure 14: Flow chart for relative pose estimation with
LiDAR and poles.
extracted into multiple independent clusters. A pre-
defined condition selects the relevant pole cluster and
with the transformation it into a 2D plane, it serves as
input for the localization process. Therefore we are
using a particle filter. The initial position and ground
truth are provided from GNSS sensor. The prediction
step uses the speed and yaw rate information which
are gathered from IMU. With the combination a the
lane detection algorithm and the pole extraction al-
gorithm we combine two position determination ap-
proaches, with the goal to enhance the autonomous
driving.
REFERENCES
3M (2021). 3m
TM
stamark
TM
high performance
contrast tape 380aw-5. https://www.3m.com/
3M/en US/company-us/all-3m-products/
∼
/3M-
Stamark-High-Performance-Contrast-Tape-380AW-
5/?N=5002385+8709322+3294235158&rt=rud.
Accessed: 20121-02-24.
Coatings, B. (2016). Basf cool coatings. https:
//www.basf.com/global/de/who-we-are/organization/
locations/europe/german-sites/Muenster/News-
Releases/BASF-erhaelt-Bundespreis-Ecodesign-
fuer-Cool-Coatings.html. Accessed: 2021-02-24.
Guan, H., Li, J., Yu, Y., Wang, C., Chapman, M., and Yang,
B. (2014). Using mobile laser scanning data for auto-
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
76

mated extraction of road markings. ISPRS Journal of
Photogrammetry and Remote Sensing, 87:93–107.
Haque, R., Islam, M., Alam, K. S., Iqbal, H., and Shaik,
E. (2019). A computer vision based lane detection
approach. International Journal of Image, Graphics
& Signal Processing, 11(3).
Hata, A. and Wolf, D. (2014). Road marking detection us-
ing lidar reflective intensity data and its application to
vehicle localization. In 17th International IEEE Con-
ference on Intelligent Transportation Systems (ITSC),
pages 584–589. IEEE.
Kammel, S. and Pitzer, B. (2008). Lidar-based lane marker
detection and mapping. In 2008 IEEE Intelligent Ve-
hicles Symposium, pages 1137–1142. IEEE.
Koch, C., Georgieva, K., Kasireddy, V., Akinci, B., and
Fieguth, P. (2015). A review on computer vision based
defect detection and condition assessment of concrete
and asphalt civil infrastructure. Advanced Engineer-
ing Informatics, 29(2):196–210.
Kodagoda, K., Wijesoma, W. S., and Balasuriya, A. P.
(2006). Cute: Curb tracking and estimation.
IEEE Transactions on Control Systems Technology,
14(5):951–957.
Kumar, P., McElhinney, C. P., Lewis, P., and McCarthy, T.
(2013). An automated algorithm for extracting road
edges from terrestrial mobile lidar data. ISPRS Jour-
nal of Photogrammetry and Remote Sensing, 85:44–
55.
Kumar, P., McElhinney, C. P., Lewis, P., and McCarthy,
T. (2014). Automated road markings extraction from
mobile laser scanning data. International Journal
of Applied Earth Observation and Geoinformation,
32:125–137.
Li, Y., Iqbal, A., and Gans, N. R. (2014). Multiple lane
boundary detection using a combination of low-level
image features. pages 1682–1687.
Mu, C. and Ma, X. (2014). Lane detection based on object
segmentation and piecewise fitting. TELKOMNIKA
Indones. J. Electr. Eng. TELKOMNIKA, 12(5):3491–
3500.
Obst, M., Hobert, L., and Reisdorf, P. (2015). Multi-sensor
data fusion for checking plausibility of V2V com-
munications by vision-based multiple-object tracking.
IEEE Vehicular Networking Conference, VNC, 2015-
Janua(January):143–150.
Ouster (2014). Ouster os1 datasheet. https://data.ouster.
io/downloads/OS1-lidar-sensor-datasheet.pdf. Ac-
cessed: 2021-02-24.
Thuy, M. and Le
´
on, F. (2010). Lane detection and track-
ing based on lidar data. Metrology and Measurement
Systems, 17(3):311–321.
ublox (2017). NEO-M8P u-blox M8 High Precision GNSS
Modules Data Sheet. Document Number UBX-
15016656, Revision R05, January 2017.
Wagner, W., Ullrich, A., and Briese, C. (2003). Der laser-
strahl und seine interaktion mit der erdoberfl
¨
ache.
¨
Osterreichische Zeitschrift f
¨
ur Vermessung & Geoin-
formation, VGI, 4(2003):223–235.
Yan, L., Liu, H., Tan, J., Li, Z., Xie, H., and Chen, C.
(2016). Scan line based road marking extraction from
mobile lidar point clouds. Sensors, 16(6):903.
Empirical Evaluation of a Novel Lane Marking Type for Camera and LiDAR Lane Detection
77
