
Unsupervised Domain Extension for Nighttime Semantic Segmentation
in Urban Scenes
Sebastian Scherer
∗
, Robin Sch
¨
on
∗
, Katja Ludwig and Rainer Lienhart
University of Augsburg, Universitatsstraße 1, 86159 Augsburg, Germany
Keywords:
Self-supervised Learning, Image-to-Image Translation, Semantic Segmentation, Nighttime.
Abstract:
This paper deals with the problem of semantic image segmentation of street scenes at night, as the recent ad-
vances in semantic image segmentation are mainly related to daytime images. We propose a method to extend
the learned domain of daytime images to nighttime images based on an extended version of the CycleGAN
framework and its integration into a self-supervised learning framework. The aim of the method is to reduce
the cost of human annotation of night images by robustly transferring images from day to night and training
the segmentation network to make consistent predictions in both domains, allowing the usage of completely
unlabelled images in training. Experiments show that our approach significantly improves the performance on
nighttime images while keeping the performance on daytime images stable. Furthermore, our method can be
applied to many other problem formulations and is not specifically designed for semantic segmentation.
1 INTRODUCTION
Semantic segmentation has accomplished amazing
performance on annotated data. However, the
datasets are limited to some cities and also often do
not include scenes that are outside the usual distri-
bution, such as situations with snow, rain or images
taken at night. If the trained neural network is guided
into such a new environment, it is of great interest
that it also works there without having to create a new
dataset. In general, one wants to adjust the training of
the neural network so that it is able to respond to the
new domain without degrading to the known domain.
We formulate this problem as Unsupervised Domain
Extension, i.e. given a dataset on a particular do-
main, our goal is to make the neural network robust
to other known domains for the problem under con-
sideration, without annotated data being available. To
tackle this problem, this paper proposes a method for
semantic segmentation that combines a semantic con-
sistent image-to-image translation framework with a
self-supervised learning framework. Given a source
dataset with labels and a dataset from a new domain
without labels, the goal is to adapt the network so that
it performs similarly in both domains while training
only with the labels of on one domain. This prob-
lem formulation is quite similar to the domain adap-
∗
indicates equal contribution.
tion formulation, where a network is usually trained
on a synthetic dataset and shall perform in the real
world. The difference is here, that we still care about
the source domain.
In this work, we consider this problem for the case
of semantic segmentation on daytime and nighttime
images. More specific, we want to achieve that while
we only have annotated data from the daytime do-
main, we also become more robust to nighttime im-
ages for which we do not have labelled data.
One of the biggest obstacles for a segmentation
network trained only with annotated data showing a
landscape during the day is the visual difference from
the landscape at night. To mitigate this problem, we
transform the annotated daytime images to incorpo-
rate the visual details of the nighttime images without
changing the content, so that we can continue to use
the existing annotations. A possible tool for such a
transformation is provided by the CycleGAN frame-
work (Zhu et al., 2017). However, this technique is
prone to hallucinate semantic inconsistencies into the
transformed image. Even the smallest hallucinations
can cause the annotations to be incorrect and the net-
work to receive negative, noisy feedback. In order to
suppress such inconsistencies, we will use the feature
loss from style transfer (Gatys et al., 2015) provided
by a pretrained network to keep the content of the im-
age.
In addition to such a transformations, we will in-
38
Scherer, S., Schön, R., Ludwig, K. and Lienhart, R.
Unsupervised Domain Extension for Nighttime Semantic Segmentation in Urban Scenes.
DOI: 10.5220/0010551500380047
In Proceedings of the 2nd International Conference on Deep Learning Theory and Applications (DeLTA 2021), pages 38-47
ISBN: 978-989-758-526-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

centivize additional robustness when training the seg-
mentation network itself. Inspired by (Tarvainen and
Valpola, 2017), we will use a student network and
a teacher network of identical architecture with the
teachers parameters being a exponential moving aver-
age of the student parameters. From this, we formu-
late two consistency losses that motivate the network
to respond to night images consistently, with the goal
of learning domain invariant features related to day
and night.
This paper will be structured as follows. Section 2
will show previous related work and explain the basic
functionality of the CycleGAN framework. Section 3
gives a detailed explanation of our proposed solution.
Section 4 provides results of our experiments and sec-
tion 5 contains our conclusion.
2 RELATED WORKS
Self-supervised Learning. The objective of self-
supervised learning (SSL) is to include unlabelled
data into the training and therefore perform better
than a supervised learning technique using labelled
data only. The dominant approaches for SSL are
pseudo-labelling and consistency regularization. A
complete review can be found in this survey (van En-
gelen and Hoos, 2020).
Pseudo-Labeling is probably the simplest ap-
proach for SSL. It was first proposed by (Lee, 2013).
(Xie et al., 2019) recently showed that pseudo labels
can indeed improve overall performance. In their ap-
proach, a model is first trained on the labelled dataset
until convergence. It is then used to make predictions
for the unlabelled data, so-called pseudo labels. From
these pseudo labels, the samples for which the pre-
diction is certain (above a predefined threshold) are
added to the pseudo label dataset and a new model is
then trained on the extended labelled dataset.
Recent SSL methods are based on consistency
regularization. They employ unlabelled data to pro-
duce consistent predictions under different perturba-
tions (Tarvainen and Valpola, 2017). Possible pertur-
bations can be data augmentation, dropout (Srivastava
et al., 2014) or simple noise on the input data. The
trained model should be robust against such perturba-
tions. Therefore, these approaches leverage the idea
that a classifier should output the same distribution for
different augmented versions of an unlabelled sample.
This is typically achieved by minimizing the differ-
ence between the prediction of a model with weights
θ of different perturbed versions ˆx
i
1
, ˆx
i
2
of an input x
i
:
||( f (θ, ˆx
i
1
), f (θ, ˆx
i
2
)||
2
2
. (1)
Such a loss can be calculated on labelled and unla-
belled data. The recent approach Mean Teacher fur-
ther uses ensemble predictions during training, be-
cause an ensemble model generally gives better pre-
dictions compared to a single model (Tarvainen and
Valpola, 2017). Instead of comparing model predic-
tions for different versions of the image directly, the
predictions of the trained model are compared with
the predictions of a weighted average model from the
previous epochs. One term of Eq. 1 is therefore re-
placed with the output of the ensemble model. In this
setup, the teacher model is an exponential moving av-
erage (EMA) of the student model and is intended to
transfer the learned knowledge to the student. Typi-
cally, a Mean Square Error is used to ensure consis-
tency (Tarvainen and Valpola, 2017). Recently, the
usage of the Mixup (Zhang et al., 2018) augmentation
as perturbation has been used by (Verma et al., 2019)
and showed state-of-the art results, showing that dif-
ferent perturbations yield different results.
Image-to-Image Translation. During the last
years, multiple methods provide the possibility to
transform an image from a certain source domain
S to adopt the style of a target domain T without
changing the content of the original image. Pub-
lications like (Zhu et al., 2017), (Liu et al., 2017)
and (Huang et al., 2018) try to solve this problem
without having paired image data at hand (no exact
correspondences between images) by employing a
pixel-wise reconstruction constraint. Other publi-
cations, such as (Johnson et al., 2016), (Atapattu
and Rekabdar, 2019), (Zhao et al., 2020) and (Nizan
and Tal, 2020), try to avoid the utilization of the
pixel-wise reconstruction constraint.
One of the most well-known methods to do
so is the CycleGAN framework, originating from
(Zhu et al., 2017). This method provides a way of
transforming images from domain S to domain T
and backwards by training two image transformation
networks G
S→T
and G
T →S
simultaneously. The
adoption of the other domains style will be enforced
by an adversarial training scheme with discriminators
D
T
and D
S
, which learn to distinguish between real
and generated images from the domains T and S ,
respectively.
First, we draw one pair (x
s
, x
t
) ∈ X
S
×X
T
of train-
ing images. We assume that X
S
and X
T
constitute
an adequate representation of the data distributions
p
data
(x
s
) and p
data
(x
t
). The two images are fed to the
transformation networks to obtain the transformed
images
Unsupervised Domain Extension for Nighttime Semantic Segmentation in Urban Scenes
39

ˆ
x
s
= G
S→T
(x
s
) and (2)
ˆ
x
t
= G
T →S
(x
t
). (3)
These two images are going to be judged by the re-
spective discriminators. The transformation networks
have the role of the generators, being forced to create
images in a style that the discriminators find increas-
ingly appealing. The adversarial loss for G
S→T
and
D
T
can be formulated as
L
GAN
(G
S→T
, D
T
, X
S
, X
T
) = E
x
t
∼p
data
(x
t
)
[logD
T
(x
t
)]
+E
x
s
∼p
data
(x
s
)
[log(1 − D
T
(G
S→T
(x
s
))]
(4)
The adversarial loss for G
T →S
and D
S
is conceptually
equivalent.
The following steps motivate G
S→T
and G
T →S
to preserve the semantic content of the image during
transformation. The translated images
ˆ
x
s
and
ˆ
x
t
from
Equations 2 and 3, are translated backwards into
x
cyc
s
= G
T →S
(
ˆ
x
s
) = G
T →S
(G
S→T
(x
s
)) and (5)
x
cyc
t
= G
S→T
(
ˆ
x
t
) = G
S→T
(G
T →S
(x
t
)) (6)
with the aim of reconstructing the original image.
The corresponding loss will be provided by the L1-
distance between the original and its cyclical recon-
struction:
L
cyc
(G
S→T
, G
T →S
) =
E
x
s
∼p
data
(x
s
)
[||x
s
− G
T →S
(G
S→T
(x
s
))||
1
]
+E
x
t
∼p
data
(x
t
)
[||x
t
− G
S→T
(G
T →S
(x
t
))||
1
]
(7)
The overall optimization goal is then described by
the loss function
L(G
S→T
, G
T →S
, D
S
, D
T
, X
S
, X
T
) =
λ
cyc
L
cyc
(G
S→T
, G
T →S
)
+L
GAN
(G
S→T
, D
T
, X
S
, X
T
)
+L
GAN
(G
T →S
, D
S
, X
T
, X
S
)
(8)
where λ
cyc
is a hyperparameter that denotes the rela-
tive weight of the reconstruction loss. In the original
publication (Zhu et al., 2017), this weight is set to
λ
cyc
= 10. The loss can be viewed as being subject to
an adversarial min-max game, similar to the one for
GANs:
min
G
S→T
,G
T →S
max
D
S
,D
T
L(G
S→T
, G
T →S
, D
S
, D
T
, X
S
, X
T
)
(9)
Domain Adaption. Generally, convolutional neural
networks (CNNs) only learn features from the domain
they are trained on. This causes the networks to per-
form poorly on other domains, which is called a do-
main gap. Domain adaptation methods have been de-
veloped to overcome this problem. Many studies have
been conducted by training a network on synthetic
data and then evaluating it on real data. The work of
(Hoffman et al., 2018) is close to ours, as they also use
the CycleGAN framework and enforce image content
retention over a pretrained segmentation network. In
this framework, the generator also minimizes a seg-
mentation loss of the transformed image. However,
the segmentation network can only be trained on the
source domain. The generator is therefore encouraged
to produce images near the domain on which the seg-
mentation network was trained to minimize this loss,
i.e. the source domain. The authors of (Pizzati et al.,
2020) try to bridge the domain gap with images re-
trieved from online videos. Recent state-of-the art ap-
proaches also make usage of SSL approaches such as
pseudo labeling (Zou et al., 2018) or consistency reg-
ularization (Choi et al., 2019) to close domain gap.
3 METHOLOGY
Our approach consists of a combination of an image-
to-image translation module and a SSL method. In
Section 3.1 we first formalize the problem setup. Sec-
tion 3.2 considers the image-to-image translation with
the goal to transfer the style of nighttime images to
daytime images while keeping the image content. In
Section 3.3 we consider the training for semantic seg-
mentation that combines the image-to-image transla-
tion with a SSL framework.
3.1 Problem Setup
Let S , T be the source and target domain and let X
S
,
X
T
be sets of images from each domain, respectively.
We denote x
s
∈ X
S
and x
t
∈ X
T
as data samples. We
have access to N labelled segmentation masks for the
source domain {(x
i
s
, y
i
s
)}
N
i=1
with y
i
s
as labelled se-
mantic segmentation masks. The target domain has
no labelled samples and shares C categories of the
source domain. Our task is to train a segmentation
network f
S
that performs well on both domains. More
precisely, we want to additionally learn the new target
domain without neglecting the source domain.
3.2 Stabilizing CycleGAN
The aforementioned CycleGAN method may seem as
a straightforward way of obtaining additional train-
ing data when adapting domains. The problem here
is, however, that CycleGAN requires the generators
to only submit to a reconstruction goal. This way, the
networks are allowed to learn any arbitrary transfor-
mation, as long as it can be reversed. In some cases,
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
40
this leads to transformations which perturb the seman-
tic content of an image, a phenomenon the authors of
(Chen et al., 2019) describe with the term hallucinat-
ing. This is because the cyclical invertibility of the
transformation does not necessarily enforce seman-
tic correctness. Such hallucinations lead to a drasti-
cally impaired usability of generated images as train-
ing data in subsequent tasks. When adapting or ex-
tending to other domains, such images would pose the
threat of the segmentation networks learning some-
thing false. It might come to mind that in order to
enforce a stricter content preservation policy during
training, we could simply increase the value of λ
cyc
.
However, due to being a pixel wise loss this would
only lead the networks G
S→T
and G
T →S
to learn a
transformation that is increasingly similar to the iden-
tity transformation. We thus require a loss function
that puts a stricter constraint on the preservation of
content without suppressing the alteration of the im-
ages style.
The feature loss from style transfer (see (Gatys
et al., 2015), (Gatys et al., 2016)) would in fact be
exactly what we need here. It also has been used
as a loss function for the training of networks pre-
viously. In (Johnson et al., 2016) it is combined with
style loss, and in (Atapattu and Rekabdar, 2019) ad-
versarial loss is used to change the visual details of
the images. (Hoffman et al., 2018) also use a network
based loss, but the network they use has been trained
for semantic segmentation.
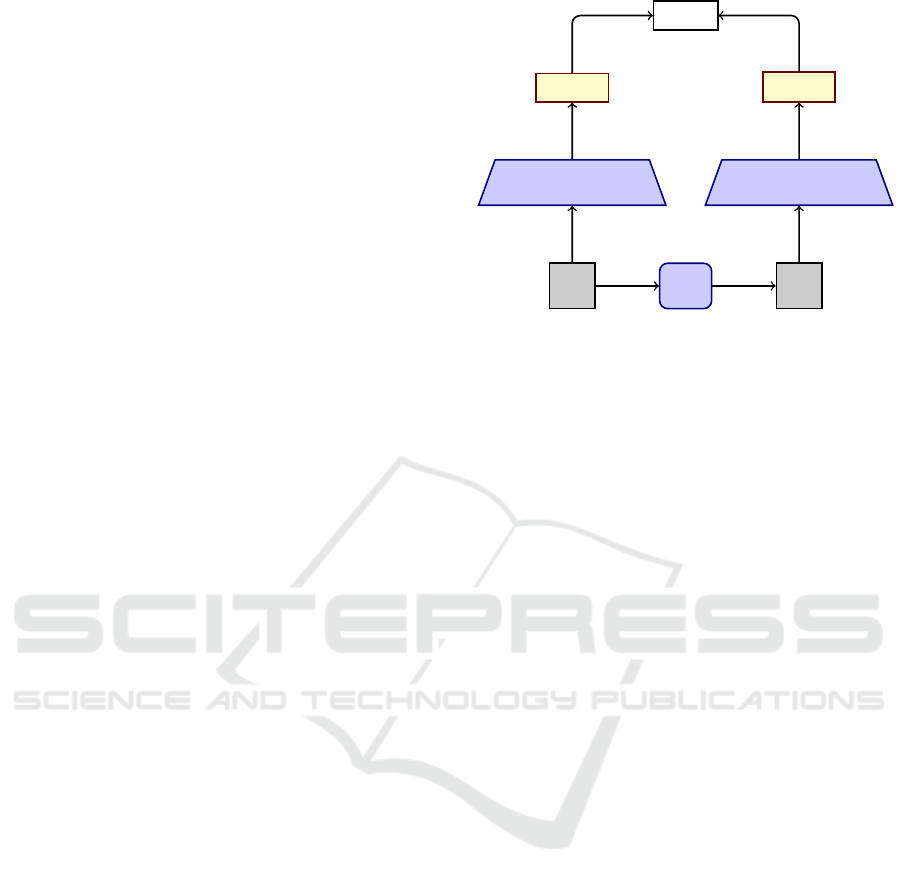
Feature loss utilizes the insight that a network
which has been trained for the task of image recog-
nition, will produce feature tensors that meaningfully
represent the content of the image. In our case, we
will use a VGG-19 network that has been pretrained
on ImageNet. To measure the difference between
the contents of two images, we simply compare the
L2 distance of their feature tensors. The compu-
tation of the feature loss itself is as follows. Let
ˆ
x
s
= G
S→T
(x
s
) be the transformed image. Let k ∈ K
be the set of indices of the layers that are going to be
used for the feature loss, and let T
k
∈ R
h
k
×w
k
×d
k
and
ˆ
T
k
∈ R
h
k
×w
k
×d
k
for k ∈ K be the tensors that contain
these layers’ output activations for x
s
and
ˆ
x
s
, respec-
tively. The feature loss is then defined as follows:
L
feature
(G
S→T
) =
∑
k∈K
E
x
s
∼p
data
(x
s
)
[||T
k
−
ˆ
T
k
||
2
2
].
(10)
The loss for G
T →S
is analogous. The overall loss
of CycleGAN (see Equation 8) can be expanded to be
x
s
ˆ
x
s
G
S→T
V GG − 19 V GG − 19
T
k
|k ∈ K
ˆ
T
k
|k ∈ K
|| · , · ||
2
2
Figure 1: This picture illustrates the functionality of the fea-
ture loss for the specific case of the transformation
ˆ
x
s
=
G
S→T
(x
s
).
L(G
S→T
, G
T →S
, D
S
, D
T
, X
S
, X
T
) =
λ
cyc
L
cyc
(G
S→T
, G
T →S
)
+L
GAN
(G
S→T
, D
T
, X
S
, X
T
)
+L
GAN
(G
T →S
, D
S
, X
T
, X
S
)
+λ
feature
L
feature
(G
S→T
)
+λ
feature
L
feature
(G
T →S
)
(11)
such that λ
feature
poses an additional hyper parameter
for the relative weight of the feature loss. The weights
of the VGG-19 network will not be altered during
training. Similar to style transfer, we can achieve a
higher freedom in texture for the generator if we only
take few layers that are occurring later in the network,
due to them having developed a more high level rep-
resentation of the image content. An illustration of
the content loss for the special case of G
S→T
can be
found in Figure 1.
3.3 Segmentation Training
As illustrated in Figure 2, our overall objective func-
tion is defined by a supervised term from labelled
data and a self-supervised term from unlabelled data.
As already mentioned, we assume that only the im-
ages from the source domain have annotations and
that there is unlabelled data for both domains avail-
able. Following (Tarvainen and Valpola, 2017), we
make use of two networks: A student network f
S
and
a teacher network f
T
, where the architecture of the
teacher network is identical to the one of the student
network. The student network f
S
will be subject to
gradient based optimization, whereas the teacher net-
work f
T
will not experience any direct training, but
only updates its weights as an exponential moving av-
erage of the student networks weights. As supervised
loss we simply define the cross-entropy loss on the
Unsupervised Domain Extension for Nighttime Semantic Segmentation in Urban Scenes
41
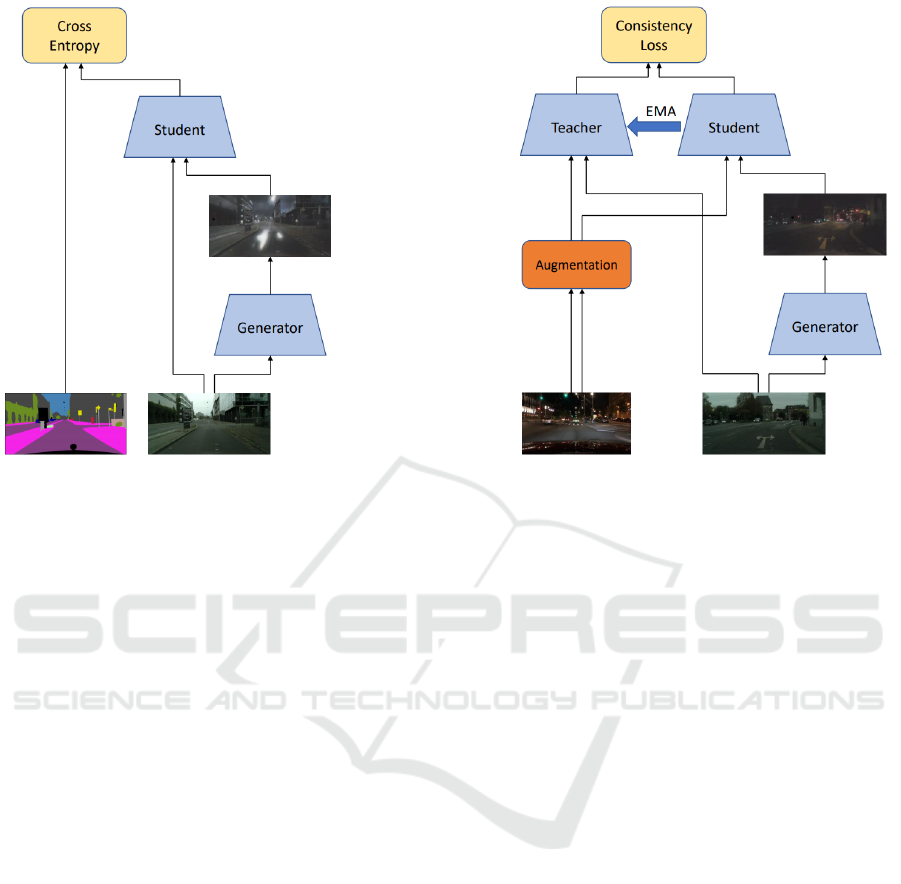
(a) Supervised Learning. (b) Self-Supervised Learning.
Figure 2: Schematic of our proposed domain extension method. It is divided into a supervised and a self-supervised training
section. The supervised section has access to the ground truth annotations. We calculate a loss on the original image at
daytime as well as its transformation to nighttime. The self-supervised training step has access to unlabelled images from
daytime and nighttime, respectively. We enforce consistent predictions between the student and the teacher network, where
the teacher gets a daytime and an augmented nighttime image, while the student gets the transformed day2night image as well
as a different augmented nighttime image.
daytime images as well as their corresponding trans-
formation to nighttime via the network G
S→T
. Since
the transformation network has been trained to main-
tain the content of the image, the labelled annotations
can be assumed to be correct even after the daytime to
nighttime transformation, and can be propagated into
the network without damage. The supervised loss is
therefore defined as:
L
sup
= L
ce
(σ( f
S
(x
s
)), y
s
)
+L
ce
(σ( f
S
(G
S→T
(x
s
))), y
s
)
(12)
where L
ce
is the standard cross-entropy loss and σ
is the softmax function.
The teacher’s weights w
t,i
at time step i are up-
dated by the student’s weights w
s,i
with the formula:
w
t,i
= αw
t,i−1
+ (1 − α)w
s,i
, (13)
where α refers to the exponential moving average
(EMA) decay that controls the updating rate. Dur-
ing training on unlabelled data, the teacher network
guides the learning of the student network by provid-
ing its outputs as a reference.
We use a self-supervised loss for two different
types of inputs that encourages the output consistency
between different styles of the same image. This al-
lows the network to learn the feature space of the tar-
get domain. In particular, given an image at nighttime
x
t
∈ X
T
, we construct a weak augmentation A
w
(x
t
)
which we feed into the teacher and a strong augmen-
tation A
s
(x
t
) which we feed into the student network
and minimize the consistency loss defined as the dif-
ference between the outputs of the two networks. In
this setup, we use Gaussian noise and color jittering as
augmentations. Furthermore, given a daytime image
x
s
and its transformation into nighttime G
S→T
(x
s
),
we feed x
s
into the teacher and G
S→T
(x
s
) into the
student. Since it is more challenging to predict the
correct segmentation for nighttime images than for
daytime images, we can view the transformation from
day to nighttime as a form of perturbation for the stu-
dent network input. This motivates our system to give
consistent predictions between daytime and nighttime
images, despite the visual appearance of the images.
In addition to that, our segmentation network has ac-
cess to real nighttime images to align the different
features of both domains and to learn the underlying
structure and style of nighttime images. Following
(Tarvainen and Valpola, 2017), we further use dropout
at the forward pass of the student as additional pertur-
bation. No dropout is performed at the forward pass
of the teacher and when the student receives an image
for the supervised loss computation.
As the predictions of the teacher f
T
are error-
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
42

prone, we found it useful to try to remove uncertain
predictions from the teacher network for the loss cal-
culation. For each pixel, we can view the maximum
output probability over all the C categories as a mea-
surement of how confident f
T
is about its prediction,
and exclude pixels for which the probability is below
a certain threshold. The excluded pixels will not play
a role in the loss propagation in order to stabilize the
training. Only pixels with high confidence will be left
and the student network can learn reliable target pre-
dictions from the teacher. We can calculate a mask for
each sample x as
w
i, j
( f
T
(x)) =
(
1 if max
c∈{1,...,C}
σ( f
T
(x))
i, j,c
≥ ρ
0, otherwise
(14)
where σ refers to the softmax activation function for
pixel positions (i, j) and ρ is the previously mentioned
confidence threshold. We can use this mask to mask
out uncertain predictions. The final self-supervised
loss is now defined as:
L
ssl
=
||w
i, j
( f
T
(x
t
)) · (σ( f
T
(A
w
(x
t
))) − σ( f
S
(A
s
(x
t
))))||
2
2
+
||w
i, j
( f
T
(x
s
)) · (σ( f
T
(x
s
)) − σ( f
S
(G
S→T
(x
s
))))||
2
2
(15)
Note that this loss is only propagated into the student
network and not into the teacher network.
By combining the consistency loss (Eq. 15) with
the supervised loss (Eq. 12), the overall objective
function is defined as:
L
overall
= L
sup
+ λ
ssl
L
ssl
, (16)
where λ
ssl
is a trade-off parameter.
4 EXPERIMENTS
This section describes the experimental setup and de-
tails of the proposed approach. We provide experi-
mental results for our stabilized CycleGAN as well as
the SSL learning procedure.
4.1 Datasets
Cityscapes (CS). The Cityscapse dataset (Cordts
et al., 2016) contains images of urban street scenes
collected from 50 cities around Germany and neigh-
boring countries. It consists of a training set of 2975
images and a validation set of 500 images. The im-
ages were all taken at daytime and have moderate di-
versity in weather and lighting conditions. We use
this dataset for supervised training and report results
using the standard 19 training classes. The dataset
further comprises 19998 coarsely annotated images.
BDD Dataset (BDD). The BDD dataset (Yu et al.,
2018) is a large driving video dataset which consists
of 100.000 images collected from different cities. It
has a large set of images taken at nighttime. It further
provides pixel-wise semantic segmentation labels for
a very small subset. However, by manual inspection
we observed that they contain labeling errors which
makes them unsuitable for evaluation. This has also
been mentioned in (Sakaridis et al., 2020). We there-
fore only use the images of this dataset.
Nighttime Driving (ND). The Nighttime dataset
(Dai and Gool, 2018) was collected during 5 rides in
multiple Swiss cities and their suburbs using a GoPro
Hero 5 camera. The dataset contains 50 annotated
nighttime images, referred to as Nighttime Driving-
test. The semantic annotations follow the 19 evalu-
ation classes of the Cityscapes dataset. It further as-
signed a void label to pixels which shall not be used
for evaluation. In this paper, we utilize the annotated
nighttime images for evaluation. At the time of this
work, the unlabelled nighttime images were not avail-
able. We have noticed that only 17 of the standard 19
classes are annotated in this test set. We therefore re-
port results only for those 17 classes.
Dark Zurich Dataset (DZ). The Dark Zurich
dataset (Sakaridis et al., 2019) was recorded in Zurich
using a GoPro 5 camera as well. It comprise 3041
daytime, 2920 twilight and 2416 nighttime images.
In summary, for the image-to-image translation
training, we use all images of the CS dataset as day-
time images and all nighttime images of the BDD and
DZ dataset. The 2975 fine labelled images from CS
are used for supervised training. For SSL training, we
utilize all images from CS and all nighttime images
of BDD and DZ. The ND dataset is used for the eval-
uation of the nighttime domain.
4.2 Implementation Details
The image transformation framework and the net-
works used for segmentation are trained separately.
The generators used for image transformation have
the same architecture as in (Zhu et al., 2017), with
one exceptio. In order to suppress checkerboard ar-
tifacts (Odena et al., 2016), the deconvolution lay-
ers have been replaced by a concatenation of a bilin-
ear upsampling layer and a subsequent regular con-
Unsupervised Domain Extension for Nighttime Semantic Segmentation in Urban Scenes
43
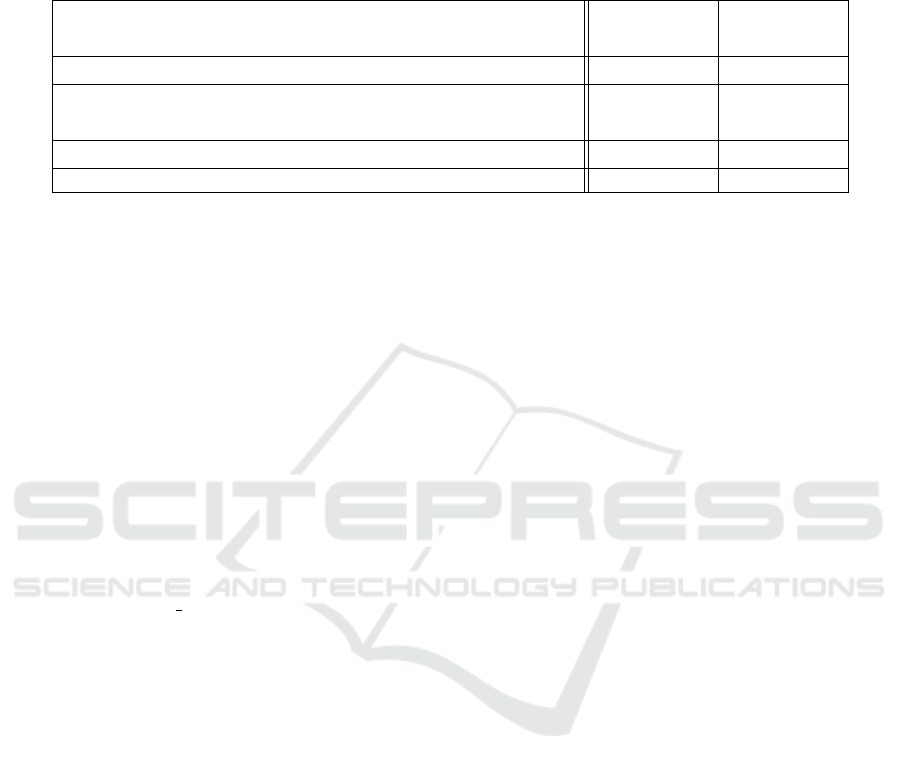
Table 1: Results of our methods on the CS and ND validation set in the center and right column. The leftmost column contains
the method and the respective training data separated with a ”-”, while a ”+” indicates a combination of multiple methods or
datasets. The ”Baseline” model was only trained on the Cityscapes training set and without SSL. ”Day2Night (CS)” denotes
the Cityscapes dataset translated to nighttime prior to the segmentation training. If ”Day2Night (CS)” is used, the translation
was carried out with the respective image translation method mentioned in the row.
Cityscapes Nighttime
Method - Train Data mIoU Acc mIoU Acc
Baseline - Daytime (CS) 68.8 94.7 35.0 80.0
CycleGAN - Day2Night (CS) 52.9 90.9 40.34 84.8
CycleGAN + FL - Day2Night (CS) 63.7 93.5 44.7 85.4
CycleGAN + FL - Day2Night (CS) + Daytime (CS) 67.4 94.3 45.1 85.5
SSL + CycleGAN + FL - (CS + Day2Night (CS) + DZ + BDD) 68.2 94.4 56.5 90.1
volutional layer with the same filter size and chan-
nel number as the replaced deconvolution. Due to
the high resolution of our images, we use the ver-
sion with 9 residual blocks. Similar as in the Cycle-
GAN framework, our discriminator is a PatchGAN
discriminator (Isola et al., 2017). The Adam opti-
mizer (β
1
= 0.5, β
2
= 0.999) (Kingma and Ba, 2017)
is used for training the networks, with an initial learn-
ing rate of 0.0002 for the first 100.000 iterations and
0.0001 after that. The generators / discriminators are
trained for a total of 700.000 iterations. Additionally,
the gradient norms are clipped to 5.0 per network,
in order to stabilize the training. Following common
practise, we save the exponential moving average of
the generator for further usage (Yazici et al., 2019),
with an EMA decay of 0.9999. For the feature loss,
we utilize the block5 conv2 layer of the VGG-19 ar-
chitecture. We have noticed empirically that this layer
gives slightly more stable results than others.
As segmentation network architecture we use the
DeeplabV2 (Chen et al., 2018) architecture for the
student and teacher network. The backbone is a VGG-
16 (Simonyan and Zisserman, 2015) network, which
has been pretrained for classification on ImageNet.
For stabilization, we report results of our teacher
model for evaluation. For those trainings without
SSL, we still maintain an EMA version of the seg-
mentation network. We train the segmentation net-
work for 50.000 iterations with a batch size of 8 on
random crops of resolution 256 × 256 from images
rescaled to 512 × 1024. The EMA decay for the
teacher network is at 0.999. The confidence threshold
ρ is set to 0.5 at the beginning and linearly increased
to 0.9 during training. We select a warm-up phase of
10.000 steps, where no SSL loss is used for training.
After the 10.000th iteration both the SSL loss and the
supervised loss are used to compute the gradient. A
batch consists of daytime images, converted daytime
images and nightime images. Since the total SSL loss
is generally quite small during training, we set the rel-
ative weight λ
ssl
(if used) to an initial value of 50 and
linearly increase the value until it has doubled at the
end of the training. The optimizer in use is Adam with
a learning rate of 0.0001. The image generation net-
works will not be updated during the training of the
segmentation network.
4.3 Results
We run several experiments and compare the results
to a baseline model. The baseline version was only
trained on the Cityscapes training set without SSL
or transformed images. First, we compare our ex-
tended CycleGAN method with the standard Cycle-
GAN without feature loss. The two implementations
differ in the additional feature loss alone. To quan-
titatively evaluate whether the generated images of
our extended method are better suited for segmenta-
tion, we trained a segmentation network only on the
transformed images of the Cityscapes training set for
both our extended method and those from the stan-
dard CycleGAN. We report standard IoU and accu-
racy as performance measurements. Table 1 summa-
rizes the evaluation on the CS and the ND dataset.
It can be seen that the segmentation network that re-
ceives only transformed CS images with standard Cy-
cleGAN performs worse both on CS and ND com-
pared to our modification with an additional feature
loss. The fact that the model trained with CycleGAN
images is significantly worse on the CS validation set
can be explained by the fact that standard CycleGAN
does not preserve semantic content well. Compared
to the baseline, the segmentation network trained on
CycleGAN + FL images performs better on the night-
time dataset and slightly worse at the daytime dataset.
This can be explained by the fact that the network
only receives transformed images and therefore no
images from the source domain directly. To analyse
this more precisely, we also trained our segmentation
network on 50% transformed CS images as well as
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
44

(a) (b) (c) (d)
Figure 3: [Best viewed in color] (a) Input image. (b) Ground-truth segmentation mask. (c) Prediction of our baseline model
trained only on (CS). (d) Prediction of our extended method.
50% non-transformed images per batch. This way
the trained model has access to both domains. Com-
pared to the baseline we can see that we improved
mIoU by 10% at the nighttime domain while slightly
dropping performance on the daytime domain. Ta-
ble 1 also reports results of our segmentation network
trained with our SSL approach. It can be seen that
it further improves the performance at the nighttime
dataset. Compared to the baseline, we improved the
mIoU on the nighttime dataset by 21.5%, while keep-
ing the performance on the daytime dataset stable.
Two reasons may explain the slight drop in per-
formance in the daytime validation set in our trained
models with CycleGAN+FL images on the one hand
and with additional SSL loss on the other hand.
Firstly compared to the baseline, the network now
learns features of an additional domain. It either does
so by learning domain invariant features or by differ-
ent modes within the network. Furthermore, the net-
work is no longer strongly adapted to a single domain,
which means that we no longer overfit this domain
strongly. Secondly, even though we enforce to keep
the content of the image after the day to night trans-
formation, it may still be possible that the borders of
the segmentation masks slightly change. As we use
a lower dimensional feature map for the loss calcula-
tion, we can not guarantee that this is avoided.
We also show the improvement on nighttime im-
ages qualitatively in Figure 3. It compares the predic-
tions of our proposed method to the baseline. With
our extended training, the predicted labels are more
precise. In all rows, the examples show a better esti-
mation of the road and also smaller objects like people
and vehicles are detected more finely.
5 CONCLUSION
In this work, we investigated the problem of unsu-
pervised domain extension by training a network for
the task of semantic segmentation on daytime images
and additionally making it robust for nighttime im-
ages. We proposed two complementary approaches to
solve this task. In the first step, daytime images were
transformed into nighttime images and vice versa via
the CycleGAN framework. We proposed a simple
additional mechanism to retain more of the seman-
tic content during the transformation for better super-
vised segmentation learning. In the second step, we
integrated the transformation network into a state-of-
the art self-supervised learning approach. Overall, we
improved the performance on nighttime images com-
pared to a baseline by a large margin, while keeping
the performance on the source domain stable. These
results demonstrate the effectiveness of our approach,
making segmentation networks trained with only la-
belled daytime images perform robustly at night.
REFERENCES
Atapattu, C. and Rekabdar, B. (2019). Improving the real-
ism of synthetic images through a combination of ad-
versarial and perceptual losses. In 2019 International
Unsupervised Domain Extension for Nighttime Semantic Segmentation in Urban Scenes
45

Joint Conference on Neural Networks (IJCNN), pages
1–7.
Chen, L., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2018). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE Trans. Pattern
Anal. Mach. Intell., 40(4):834–848.
Chen, Y., Li, W., Chen, X., and Gool, L. V. (2019). Learn-
ing semantic segmentation from synthetic data: A ge-
ometrically guided input-output adaptation approach.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Choi, J., Kim, T., and Kim, C. (2019). Self-ensembling
with gan-based data augmentation for domain adapta-
tion in semantic segmentation. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion (ICCV).
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Dai, D. and Gool, L. (2018). Dark model adaptation: Se-
mantic image segmentation from daytime to night-
time. 2018 21st International Conference on Intel-
ligent Transportation Systems (ITSC), pages 3819–
3824.
Gatys, L. A., Ecker, A. S., and Bethge, M. (2015). A neural
algorithm of artistic style.
Gatys, L. A., Ecker, A. S., and Bethge, M. (2016). Im-
age style transfer using convolutional neural networks.
2016 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 2414–2423.
Hoffman, J., Tzeng, E., Park, T., Zhu, J.-Y., Isola, P.,
Saenko, K., Efros, A. A., and Darrell, T. (2018).
Cycada: Cycle consistent adversarial domain adapta-
tion. In International Conference on Machine Learn-
ing (ICML).
Huang, X., Liu, M.-Y., Belongie, S., and Kautz, J. (2018).
Multimodal unsupervised image-to-image translation.
In ECCV.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. CVPR.
Johnson, J., Alahi, A., and Fei-Fei, L. (2016). Perceptual
losses for real-time style transfer and super-resolution.
In European Conference on Computer Vision.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
Lee, D.-H. (2013). Pseudo-label : The simple and efficient
semi-supervised learning method for deep neural net-
works. ICML 2013 Workshop : Challenges in Repre-
sentation Learning (WREPL).
Liu, M.-Y., Breuel, T., and Kautz, J. (2017). Unsuper-
vised image-to-image translation networks. In Guyon,
I., Luxburg, U. V., Bengio, S., Wallach, H., Fer-
gus, R., Vishwanathan, S., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 30. Curran Associates, Inc.
Nizan, O. and Tal, A. (2020). Breaking the cycle - col-
leagues are all you need. In IEEE conference on com-
puter vision and pattern recognition (CVPR).
Odena, A., Dumoulin, V., and Olah, C. (2016). Deconvolu-
tion and checkerboard artifacts. Distill.
Pizzati, F., Charette, R. d., Zaccaria, M., and Cerri, P.
(2020). Domain bridge for unpaired image-to-image
translation and unsupervised domain adaptation. In
Proceedings of the IEEE/CVF Winter Conference on
Applications of Computer Vision (WACV).
Sakaridis, C., Dai, D., and Van Gool, L. (2019). Guided cur-
riculum model adaptation and uncertainty-aware eval-
uation for semantic nighttime image segmentation. In
The IEEE International Conference on Computer Vi-
sion (ICCV).
Sakaridis, C., Dai, D., and Van Gool, L. (2020).
Map-guided curriculum domain adaptation and
uncertainty-aware evaluation for semantic nighttime
image segmentation. IEEE Transactions on Pattern
Analysis and Machine Intelligence.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In Bengio, Y. and LeCun, Y., editors, 3rd Interna-
tional Conference on Learning Representations, ICLR
2015, San Diego, CA, USA, May 7-9, 2015, Confer-
ence Track Proceedings.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: a simple way
to prevent neural networks from overfitting. The jour-
nal of machine learning research, 15(1):1929–1958.
Tarvainen, A. and Valpola, H. (2017). Mean teachers are
better role models: Weight-averaged consistency tar-
gets improve semi-supervised deep learning results. In
Guyon, I., Luxburg, U. V., Bengio, S., Wallach, H.,
Fergus, R., Vishwanathan, S., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 30. Curran Associates, Inc.
van Engelen, J. E. and Hoos, H. H. (2020). A sur-
vey on semi-supervised learning. Machine Learning,
109(2):373–440.
Verma, V., Lamb, A., Kannala, J., Bengio, Y., and Lopez-
Paz, D. (2019). Interpolation consistency training
for semi-supervised learning. In Proceedings of the
Twenty-Eighth International Joint Conference on Arti-
ficial Intelligence, IJCAI-19, pages 3635–3641. Inter-
national Joint Conferences on Artificial Intelligence
Organization.
Xie, Q., Hovy, E. H., Luong, M., and Le, Q. V. (2019). Self-
training with noisy student improves imagenet classi-
fication. CoRR, abs/1911.04252.
Yazici, Y., Foo, C., Winkler, S., Yap, K., Piliouras, G.,
and Chandrasekhar, V. (2019). The unusual effective-
ness of averaging in GAN training. In 7th Interna-
tional Conference on Learning Representations, ICLR
2019, New Orleans, LA, USA, May 6-9, 2019. Open-
Review.net.
Yu, F., Xian, W., Chen, Y., Liu, F., Liao, M., Madhavan,
V., and Darrell, T. (2018). BDD100K: A diverse driv-
ing video database with scalable annotation tooling.
CoRR, abs/1805.04687.
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
46

Zhang, H., Cisse, M., Dauphin, Y. N., and Lopez-Paz, D.
(2018). mixup: Beyond empirical risk minimiza-
tion. International Conference on Learning Represen-
tations.
Zhao, Y., Wu, R., and Dong, H. (2020). Unpaired image-to-
image translation using adversarial consistency loss.
In Vedaldi, A., Bischof, H., Brox, T., and Frahm, J.-
M., editors, Computer Vision – ECCV 2020, pages
800–815, Cham. Springer International Publishing.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. In Computer Vision
(ICCV), 2017 IEEE International Conference on.
Zou, Y., Yu, Z., Kumar, B. V., and Wang, J. (2018). Un-
supervised domain adaptation for semantic segmen-
tation via class-balanced self-training. In Proceed-
ings of the European Conference on Computer Vision
(ECCV), pages 289–305.
Unsupervised Domain Extension for Nighttime Semantic Segmentation in Urban Scenes
47
