
UAV Inspection of Large Components: Indoor Navigation Relative to
Structures
Martin Sch
¨
orner
a
, Michelle Bettendorf, Constantin Wanninger
b
, Alwin Hoffmann
c
and Wolfgang Reif
d
Institute of Software and Systems Engineering, Augsburg University, Universit
¨
atsstraße 6a, Augsburg, Germany
Keywords:
Inspeciton of Large Components, UAVs, Adaptive Navigation, Sensor Fusion.
Abstract:
The inspection of large structures is increasingly carried out with the help of Unmanned Aerial Vehicles
(UAVs). When navigating relative to the structure, multiple data sources can be used to determine the position
of the UAV. Examples include track data from an installed camera and sensor data from the orientation sensors
of the UAV. This paper deals with the fusion of this data and its use for navigation alongside the structure. For
the sensor fusion, a concept is developed using a Kalman filter and evaluated simulatively in a prototype. The
calculated position data are also fed into a vector flight control system, which dynamically calculates and flies
a trajectory along the component using the potential field method. This is done taking into account obstacles
detected by the onboard sensors of the UAV. The established concept is then implemented with the Robot
Operating System (ROS) and evaluated simulatively.
1 INTRODUCTION
The inspection of large structures using UAVs is be-
coming increasingly popular. Applications include
the inspection of railway tracks (AG, ), aircraft (Sap-
pington et al., 2019) or the inspection of ship hulls
in dry docks (Englot and S. Hover, 2014). A less
common application is the inspection of large com-
ponents in production. In previous work, we already
covered the derivation of a route through inspection
points based on a list of part positions (Wanninger.
et al., 2020). The next step is flying a trajectory that
visits all points on the route.
A challenge compared to outdoor flights is, that
the usual methods for determining position, such as
GPS, work poorly or not at all in a production hall.
This requires the use of other sensor data to success-
fully determine the UAV’s position. Since external
camera- or radar-based tracking systems are expen-
sive and complex to set up, the work focuses on sen-
sors that can be installed on the UAV. On the one hand,
the inertial measurement unit (IMU) of the UAV itself
allows for computing a position through odometry.
a
https://orcid.org/0000-0001-6237-222X
b
https://orcid.org/0000-0001-8982-4740
c
https://orcid.org/0000-0002-5123-3918
d
https://orcid.org/0000-0002-4086-0043
On the other hand, its inspection camera can be used
to orient itself relative to the component. The map-
ping between the camera image and the real world is
not presented in this paper. Problematic parameters
such as deviations or latency are simulated. These
sensor data are fused in our approach to obtain a more
accurate and stable position estimate.
We use this position data to fly the UAV au-
tonomously to inspection points calculated in a pre-
vious step. The points are not always approached di-
rectly, but a route is calculated with the help of the
obstacle detection sensors of the UAV, which avoids
unforeseen obstacles along the way. For this purpose,
the potential field method (Koren et al., 1991) is used,
in which the UAV is attracted to the nearest target
point (global minimum) and repelled by detected ob-
stacles (maxima).
The contribution of this paper can be summarized as
follows:
• A concept for the fusion of IMU data with camera
tracking data to realize an optimal position esti-
mation relative to a component.
• Adaptive navigation of the inspection UAV rela-
tive to the inspected part with reaction to obstacles
In the following sections, related work on the subject
of inspection by UAVs is presented before the concept
for sensor fusion and dynamic navigation is explained
Schörner, M., Bettendorf, M., Wanninger, C., Hoffmann, A. and Reif, W.
UAV Inspection of Large Components: Indoor Navigation Relative to Structures.
DOI: 10.5220/0010556301790186
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 179-186
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
179
in more detail. Subsequently, the implementation of
the concept is discussed and the results of the evalua-
tion are presented. Finally, a conclusion is drawn and
the further procedure is explained.
2 RELATED WORK
For adaptive navigation, different approaches are con-
sidered below, which support both orientation to ob-
jects and sensor fusions.
In the paper by McAree et al (McAree et al.,
2016), a semi-autonomous UAV is used for structural
inspections. The UAV is equipped with a laser dis-
tance sensor to keep a safe distance from the struc-
ture to assist the pilot. For the assistance feature, the
robotics framework Robot Operating System (ROS)
was used in combination with the simulation environ-
ment Gazebo. For the full automatic inspection pre-
sented in this paper, ROS is also adopted as the basis.
In (Kawabata et al., 2018) and (Mohta et al.,
2018), a depth imaging camera is used instead of a
laser sensor, which also provide 3-dimensional map-
ping of the infrastructure using Simultaneous Local-
ization and Mapping (SLAM). This concept is in-
tended to counteract inaccuracies of the GPS signal
in the proximity of infrastructures. However, navi-
gation is based on a two-dimensional mapping of the
environment. The solution of T. Zhang et al. (Zhang
et al., 2014) also uses SLAM, but in combination with
Monte Carlo simulation. Navigation also takes place
in 2-dimensional space with a laser sensor. The sonar
sensor is only used for the detection of glass.
In the work of L. V. Santana et al. (Santana et al.,
2014), multiple sensors are fused by a simple Kalman
filter for position tracking. The odometric data of the
UAV and an ultrasonic sensor are used. On the oppo-
site side, the advantages of an extended Kalman filter
for nonlinear acceleration in the field of UAVs is pre-
sented by Belokon et al.(Zolotukhin et al., 2013). In
this project, a trajectory with an average deviation of
0.2m could be flown indoors with only one camera in
combination with UAV odometry. In contrast, a simi-
lar project by Shen et al. (Shen et al., 2013) achieves
an average deviation of 0.5 m with stereoscopic cam-
eras, but at a speed of 4 m/s.
This paper combines the sensor fusion of a simu-
lated tracking camera with the odometry of a copter
and complements it with an adaptive collision detec-
tion and avoidance strategy in an indoor szenario.
3 CONCEPT
In our use case, we assume that a larger structure in a
production hall is to be inspected by a UAV. For this
purpose, the UAV must fly to a sequence of inspection
points from which it can examine relevant parts of the
structure (Wanninger. et al., 2020). In the following,
we first give an overview of the overall concept for
flying this sequence of points. Then the individual
components of the architecture are explained in more
detail. These include the determination of the posi-
tion without external sensors and the navigation to the
respective inspection points while avoiding collisions
with obstacles.
3.1 Architecture Overview
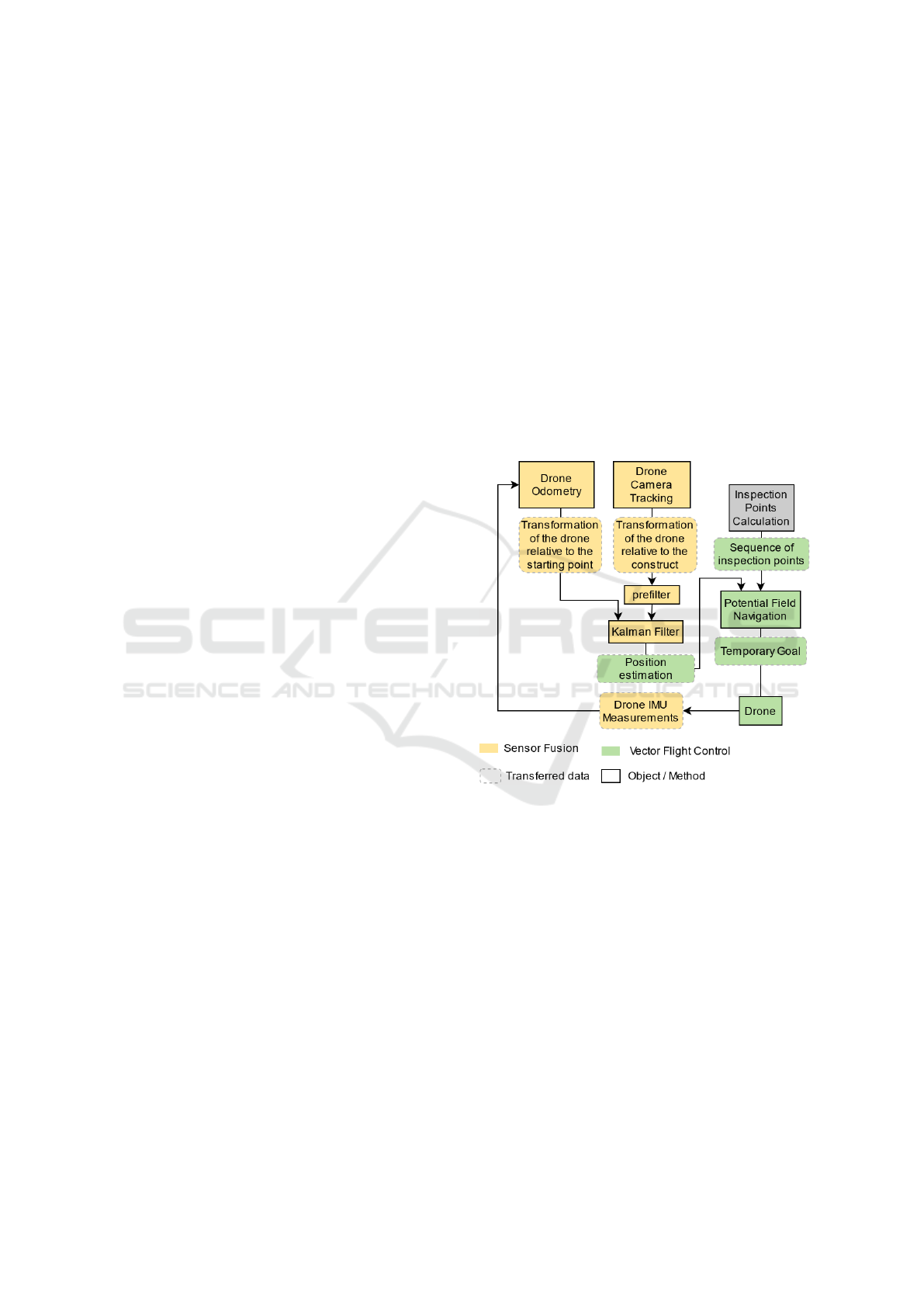
Figure 1: Sensor data of the camera tracking and the drone
odometry are fed to the Kalman filter which uses these val-
ues to estimates a new position. The estimated position is
used for the potential filed navigation.
The overall architecture of the system can be split
into two interconnected parts (see Fig. 1), the sen-
sor fusion (green) and the navigation system (yel-
low). The IMU provides the estimated position of
the UAV relative to the starting point. Additionaly
the inspection camera can be used to get position in-
formation relative to the inspected structure through
optical tracking algorithms (see (Shen et al., 2013),
(Mohta et al., 2018)). Data from the two input sources
can be used as input for the Kalman filter (Wan and
Van Der Merwe, 2000), which in turn outputs a more
accurate position estimation. In this paper, a normal
Kalman filter is used instead of an EKF or UKF (Wan
and Van Der Merwe, 2000) because after lineariza-
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
180
tion, the accuracy of the linearized system is sufficient
for our use case as shown in the evaluation. The po-
sition estimation is used as measured process variable
for the vector flight control. The flight control iterates
over a set of inspection points and generates tempo-
rary setpoints to navigate through the potential field
towards the next point. The UAV then feeds back
its IMU data to the Kalman filter and new camera
tracking data is continuously generated to complete
the control loop.
3.2 Sensor Fusion of UAV Odometry
and Camera Tracking Data
The aim of sensor fusion is to combine different sen-
sor and tracking data to produce a more accurate posi-
tion estimate. The position should not be determined
in a global coordinate system, but in relation to the
component. For this purpose, the IMU data of the
UAV as well as the position determined by camera
tracking are used in our example. The odometry data
provides the transformation from the starting point of
the UAV to its current location and has a relatively
steady course without jumps. However, the deter-
mined position drifts from the actual value over time
due to the dual integration of the IMU’s accelerome-
ter data. Camera tracking of the camera installed on
the UAV determines the position of the UAV relative
to the viewed component. A drift does not occur with
visual tracking. However, under poor visibility con-
ditions, the tracking can briefly output incorrect posi-
tions and thus lead to jumps in the position data. To
combine the advantages of both sensors and to miti-
gate their disadvantages as far as possible, we use a
Kalman filter to combine the two measured transfor-
mations. Due to the fact that the acceleration of the
UAV is non-linear, the system has to be linearized
in order to be used in conjunction with a standard
Kalman filter. For the linearization, the mean velocity
for each axis direction (x, y, z) as well as the rota-
tional velocity around the yaw axis will be calculated
in every step. As shown below using the velocity of
the x-axis as an example, the velocities are calculated
by dividing the change in position from time t to (t +
T) by the time difference since the last update (T).
v
x
=
x(t + T ) − x(t)
T
(1)
The linearization of y, z and yaw is performed analo-
gously. The estimated position from the Kalman filter
is then used for the trajectory planning.
3.3 Vector Flight Control
In this project, a feasible path which is as short as
possible and collision-free has to be computed out of
a sequence of given view points. The planning will be
done online due to the fact, that in later iterations, the
UAV should be able to avoid dynamic obstacles that
occur at runtime. Because of these constraint a vector
flight control based on a computed artificial potential
field (Chen et al., 2016) was used. The controller gen-
erates a potential field based on the current goal and
obstacles in the world. The goal represents a strong,
attracting force, whereas any obstacles have repulsive
potentials around them. The general idea is that at
any given point in the potential field the goal position
can be reached by following the potential vector at
the UAV’s current position. Static obstacle positions
are either derived from the CAD-File of the assembly
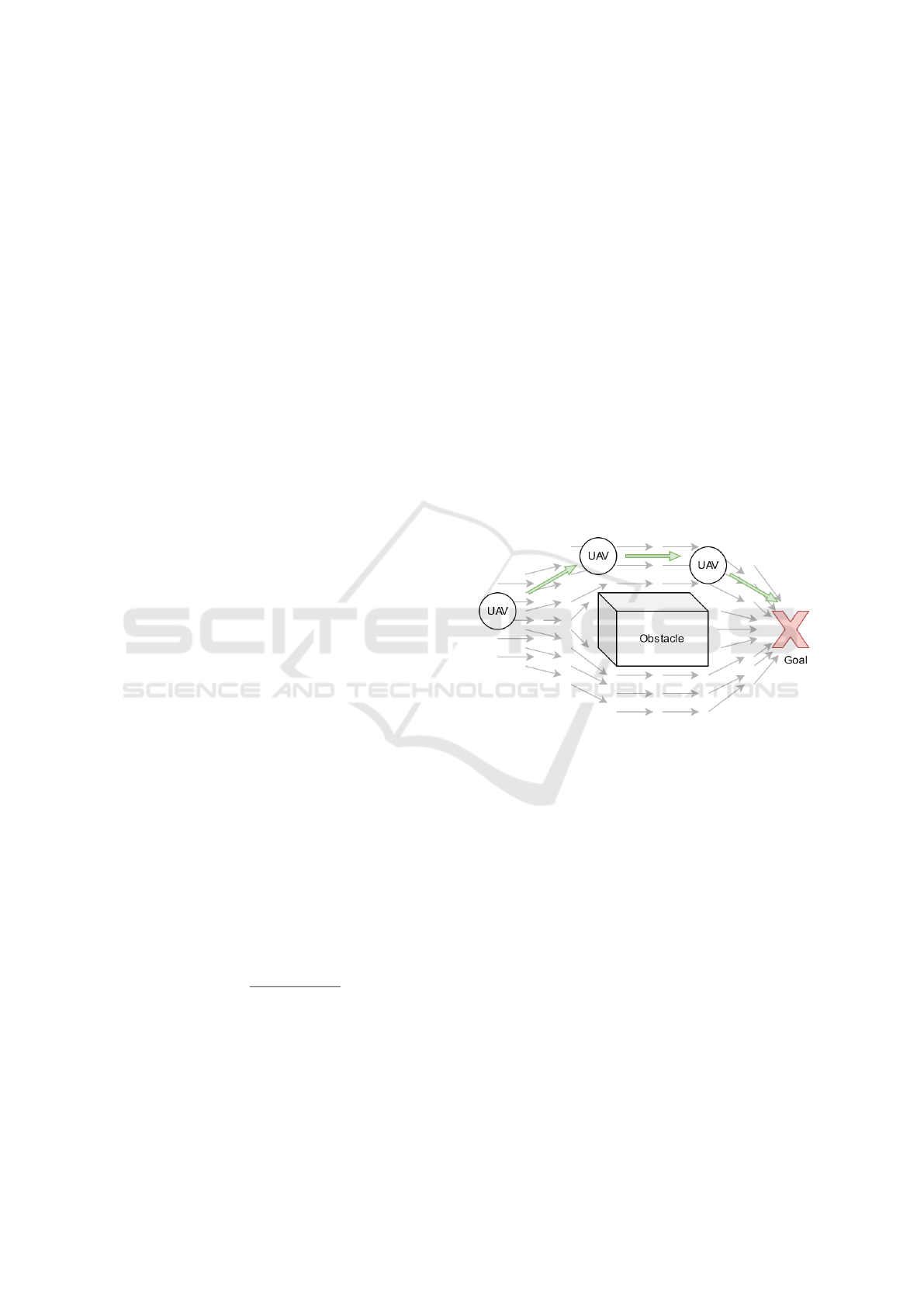
or defined manually. Figure 2 shows an example of
a UAV navigating to a goal point around a static ob-
stacle In this example, the attracting potential of the
Figure 2: UAV navigating around an obstacle in a potential
field.
goal pulls the UAV to the left. The obstacle between
the UAV and the goal alter the potential field in a way
that causes the UAV to fly around it. This method
works great with obstacles that are known in advance
(e.g. the inspected structure and its fixtures, walls...)
In order to react to dynamic obstacles like people
or tool carts, an extension of this strategy is needed.
Many UAV have onboard collision avoidance sensors
that can detect obstacles in the surroundings of the
UAV. In order fly around these obstacles, the collision
avoidance data can be used to dynamically add obsta-
cles to the potential field and recalculate the potentials
based on the new obstacles. By doing this, the UAV
avoids previously known and unforeseen obstacles.
One drawback of the potential field method is that
local minimum traps can appear. The goal should al-
ways be the global minimum. However, local min-
ima can occur and if the UAV gets pulled into one
of these minima by the potential, it gets stuck there.
UAV Inspection of Large Components: Indoor Navigation Relative to Structures
181
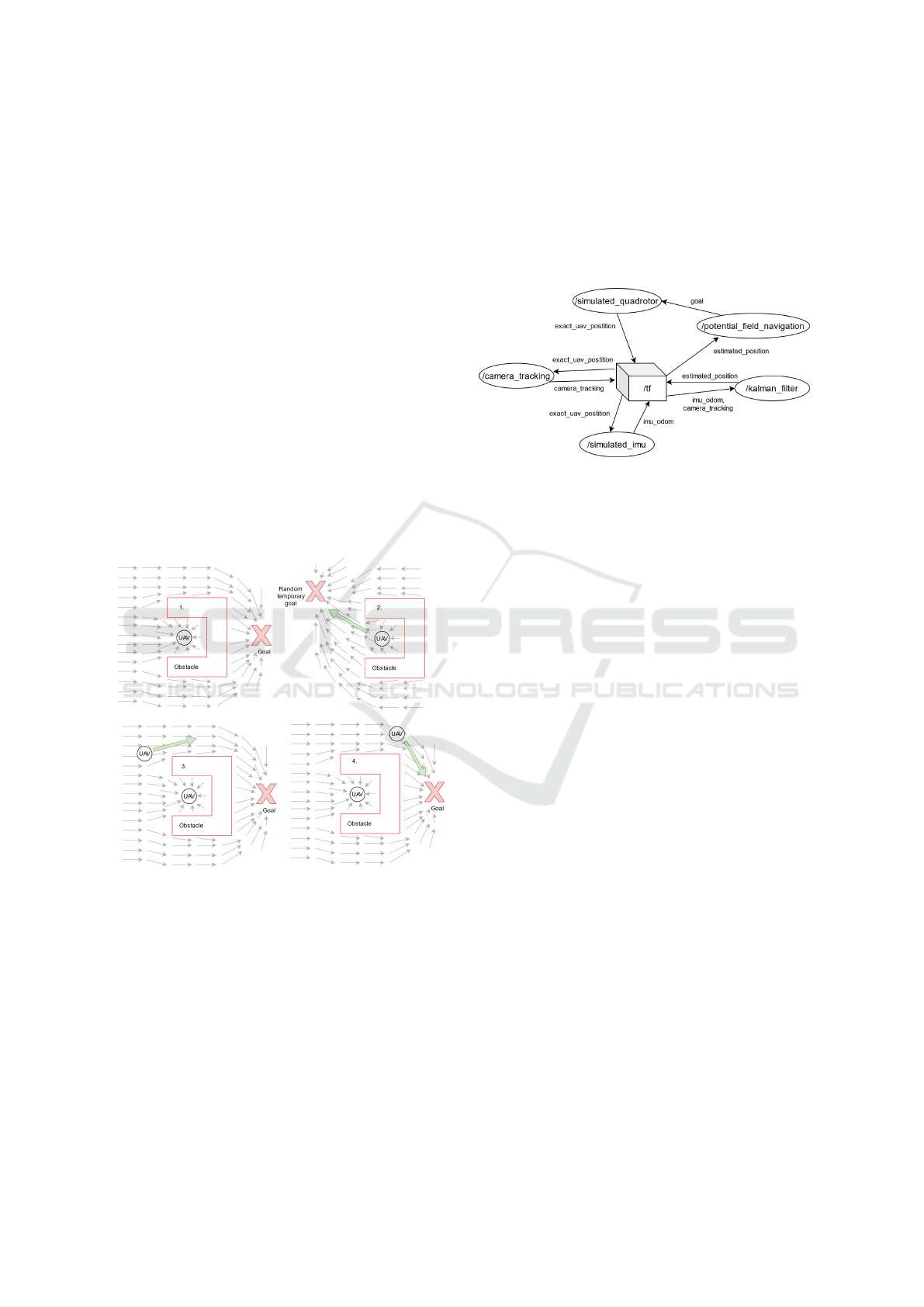
For solving this issue, we first detect, if the UAV is
stuck in a local minimum by checking if its position
stays within a small area for longer periods of time.
We then generate a random point in space as a new,
temporary goal and adjust the potential field to acco-
modate the new goal. The random walk method is
illustrated in figure 3. The robot is moving in a ran-
dom direction, which does not collide with the obsta-
cle. The UAV then approaches the temporary goal for
a certain amount of time to get out of the local min-
imum (see step 2 of Fig. 3). After some time, actual
destination point is set as the goal again and the UAV
either continues towards it or flies back to the local
minimum. If the UAV flies back to the local mini-
mum, the procedure is repeated until the minimum is
escaped.
If the UAV reaches the same minimum for multi-
ple times, there is a possibility that there is no way to
get out of the local minimum. In this case an abort
scenario can be defined where the UAV returns to its
original starting point and lands after a certain number
of unsuccessfull escape attempts.
Figure 3: Escaping the local minimum by defining a random
temporary goal.
With these strategies the UAV is able to safely fly
to an inspection point without colliding with its sur-
roundings. Completing a whole inspection is simply
a matter of flying to each of the inspection points of
the given sequence using the method described in this
subsection.
4 IMPLEMENTATION
The following section describes the implementation
of the concept described in 3. It was implemented
using the robotic framework Robot Operating System
(ROS). For the simulation of the UAV we used Ro-
torS (Furrer et al., 2016).
Figure 4: Communication of the implemented ROS nodes.
The camera tracking and imu odometry calculate their sim-
ulated sensor values based of the exact drone position. The
Kalman filter node uses these positions to create an esti-
mate which is in turn used by the potential field navigation
to control the simulated quadrotor.
4.1 Simulated Sensors
In a first step, the concept was implemented within a
simulation. Therefore, sensors with similar properties
to their real counterparts were implemented. The sim-
ulated camera tracking data calculates the exact trans-
formation from the UAV to the part to be inspected
and adds “jumps” to the position at randomized times
to simulate tracking erros. This is done by generat-
ing uniformly distributed random distances between
2 and 4 m and adding them to the translation. The
UAV’s odometry is generated by calculating the trans-
formation from the UAV’s starting point to its cur-
rent position. After that an offset that is increasing
by 0.00001 m each step is added to each axis of the
transformation to simulate an error due to drift.
4.2 Kalman Filter
The simulated sensor values are used by the Kalman
filter to generate a position estimation. Figure 4
shows the Kalman filter receiving the simulated IMU
and camera tracking sensor data. The camera position
is passed through a pre-filter that eliminates big jumps
in the camera tracking (see Fig. 1). Since accelera-
tion of the UAV is finite, it can only move a certain
amount in one control loop. If the change in the po-
sition of the UAV exceeds a predefined threshold, the
measurement is discarded. After this prefilter step,
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
182

both sensor inputs are passed to the actual Kalman fil-
ter. The actual Kalman filter was implemented using
the filterpy python library (Labbe, 2021).
The state matrix X contains the system states. It
is defined as: [x, vx, y, vx, z, vz, yaw, vyaw]
T
. The
velocities are calculated by the numerical differenti-
ation of the position. The state transition matrix F is
used to generate the state for the next timestep.
F =
1 dt 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 0 1 dt 0 0 0 0
0 0 0 1 0 0 0 0
0 0 0 0 1 dt 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 dt
0 0 0 0 0 0 0 1
(2)
The measurement martix H is used to connect the
measurements to the states and was defined as a iden-
tity matrix (I). The control transition matrix B is de-
fined as [0,0,0,0]
T
. For measurement and process
noise R and Q, the value 0.2*I was determined empir-
ically. The system state variable is initialized with the
initial position of the odometry and a velocity of zero.
In each step, a prediction is made using the system
model of the Kalman filter. Afterwards, new sensor
values of the odometry and the cameratracking are de-
rived from the ROS TF graph. These values are then
used to correct the state estimation of the Kalman fil-
ter. As a last action, the calculated estimated position
of the Filter is published to the TF graph. This posi-
tion is then used by the navigation stack to reach the
predefined inspection points.
4.3 Potential Field Method
Implementation
The inspection points (route) are generated in a previ-
ous step, presented in (Wanninger. et al., 2020) and
loaded by the navigation node which tries to reach
these points sequentially. For reaching each inspec-
tion point the potential field method is used, a vec-
tor based navigation with attracting (targets) and re-
pelling (obstacles) potentials. Instead of taking the in-
spection point as the target point, our approach creates
temporary intermediate targets in each iteration that
are approached by the UAV but never reached. This
procedure is necessary because due to proprietary in-
terfaces of the UAV only points and no direction vec-
tors can be submitted. The targets (x) are regularly re-
calculated based on the current potential acting on the
UAV, so that potentially dynamic obstacles can also
be taken into account.
x = x + r ∗ f x (3)
The force in x-direction (fx) is internally defined
cyclically, while the rate (r) is a constant that glob-
ally defines the distance of the new targets from the
current UAV position and was set to 0.5 in our tests.
The equations for the y and z position are performed
analogously. The resulting temporary target is rede-
fined in fixed time cycles until an inspection point is
reached which can be defined with a deviation, in our
tests this is set to 30cm.
To prevent the UAV from getting stuck in a local
minimum, e.g. a U-shaped obstacle, the random walk
method is utilized. If the UAV has not moved signifi-
cantly within the last time cycle, it is assumed that the
UAV has encountered a local minimum. To get out
of the local minima, new targets are randomly created
each time cycle for the UAV to reach, taking into ac-
count potential repulsive forces. This is repeated until
a target is found that leads out of the minima. Af-
ter leaving the local minima, the distance to the view-
point is recalculated and the last position is updated to
avoid an infinite loop. If no solution to the local min-
ima is found after a defined time, manual interven-
tion is required. When an inspection point is reached,
the process is repeated with the next inspection point
of the route. In a real scenario, the actual inspection
must be performed before proceeding to the next in-
spection point.
5 EVALUATION
The evaluation ist structured in three parts. Initially
the sensor fusion was evaluated by introducing errors
into the camera tracking and imu position. As a sec-
ond step, the vector flight control was tested with us-
ing the exact UAV position. Finally, the position esti-
mated by the Kalman filter was used to navigate to a
sequence of viewpoints using the vector flight control.
5.1 Sensor Fusion Evaluation
The evaluation of the Kalman filter is done by man-
ually flying the UAV to predefined points. During
flight, the exact position of the UAV is recorded and
compared to the output of the Kalman filter. For sim-
plicity we only show one axis of the UAV’s move-
ment. Each graph contains the simulated odometry of
the UAV (blue), the simulated tracking data (green)
and the output of the Kalman filter (red). The posi-
tions are calculated in relation to the starting position
of the UAV.
Initially a control flight is performed, where both
sensors report the exact UAV position without any er-
rors. Figure 5 shows how the output of the Kalman
UAV Inspection of Large Components: Indoor Navigation Relative to Structures
183
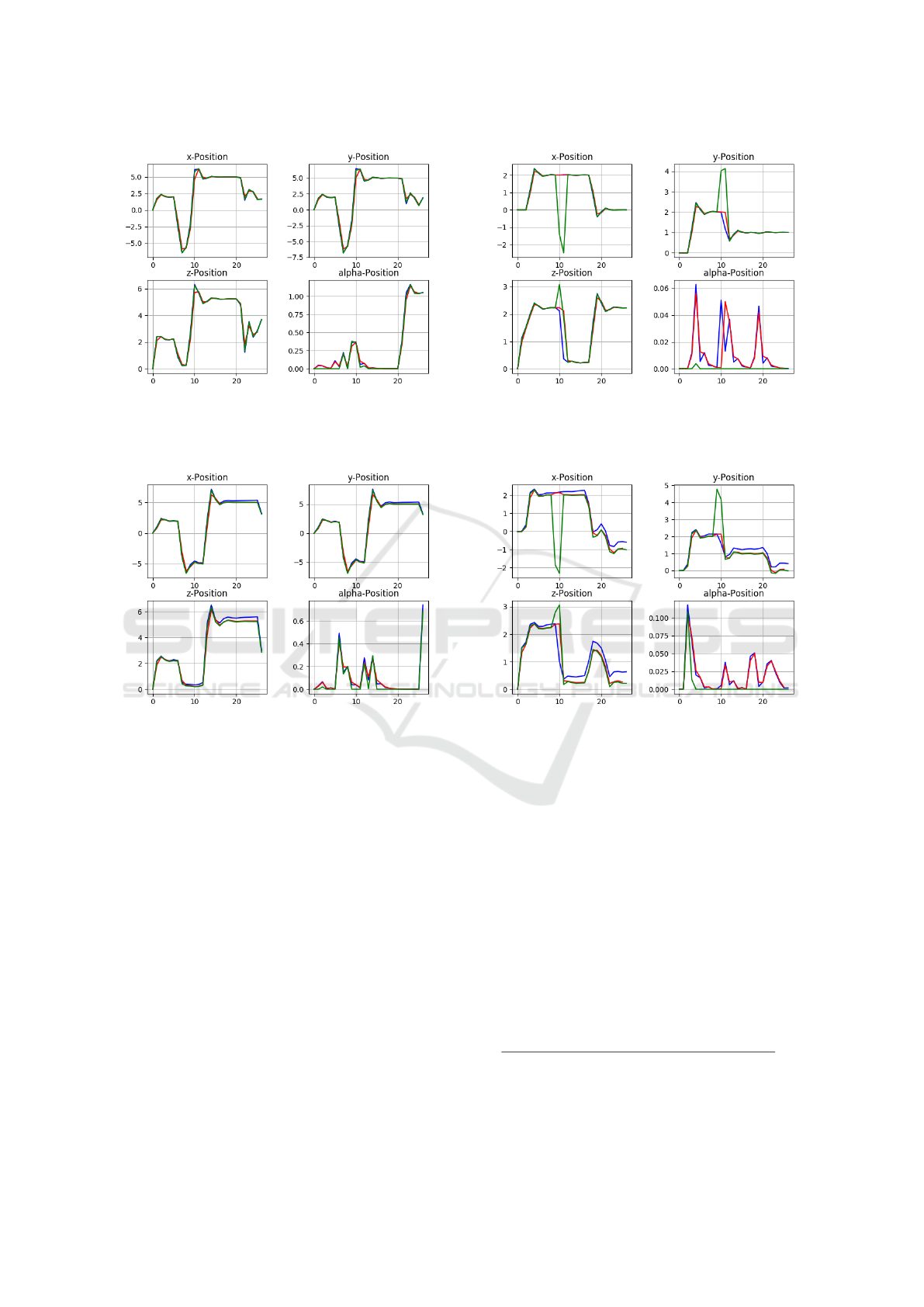
Figure 5: Output of the Kalman filter (red) with drift-
free imu-position (blue) and jump-free camera tracking data
(green).
Figure 6: Output of the Kalman filter (red) with drift-
ing imu-position (blue) and jump-free camera tracking data
(green).
filter follows the sensor data input.
In the next step, we introduced a slowly increas-
ing drift into the IMU position. Figure 6 shows how
the drift only minimally influences the output of the
Kalman filter.
We also tested the influence of jumps in the cam-
era tracking along with clean IMU data (7). Since the
prefilter keeps these jumps from getting to the Kalman
filter, the output remains unaffected of the jump.
Finally, we fed the Kalman filter the drifting IMU
data and introduced jumps in the camera tracking data
(see Fig. 8). With increasing drift of the IMU posi-
tion, the Kalman filter trusts the camera tracking data.
When the tracking data cuts out due to the jump, the
estimate deviates towards the drifting IMU position,
but recovers as soon as the tracking data is available
again.
The evaluation of the Kalman filter shows, that er-
rors like an increasing drift or jumps only influence
Figure 7: Output of the Kalman filter (red) with drift-
free imu-position (blue) and jumps in the camera tracking
(green).
Figure 8: Output of the Kalman Filter (red) with drift-
ing imu-position (blue) and jumps in the camera tracking
(green).
the position estimate minimally. Therefore the esti-
mated position can be used for the evaluation of the
vector flight control.
5.2 Vector Flight Control Evaluation
The goal of the vector flight controller is to reach all
inspection points while avoiding static obstacles. For
evaluating the vector flight control, the position esti-
mation from the Kalman filter is neglected at first and
the exact position values are used instead.
In the evaluation scenario the UAV needs to reach
a sequence of three points in 3-dimensional space.
Viewpoint x y z yaw
1 4m 1m 1m 1 degree
2 6m -1m 2m 2 degree
3 2m -2m 3m 1 degree
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
184
The point is considered as reached, if the position
of the UAV deviates less than 0.3
˜
m from the point.
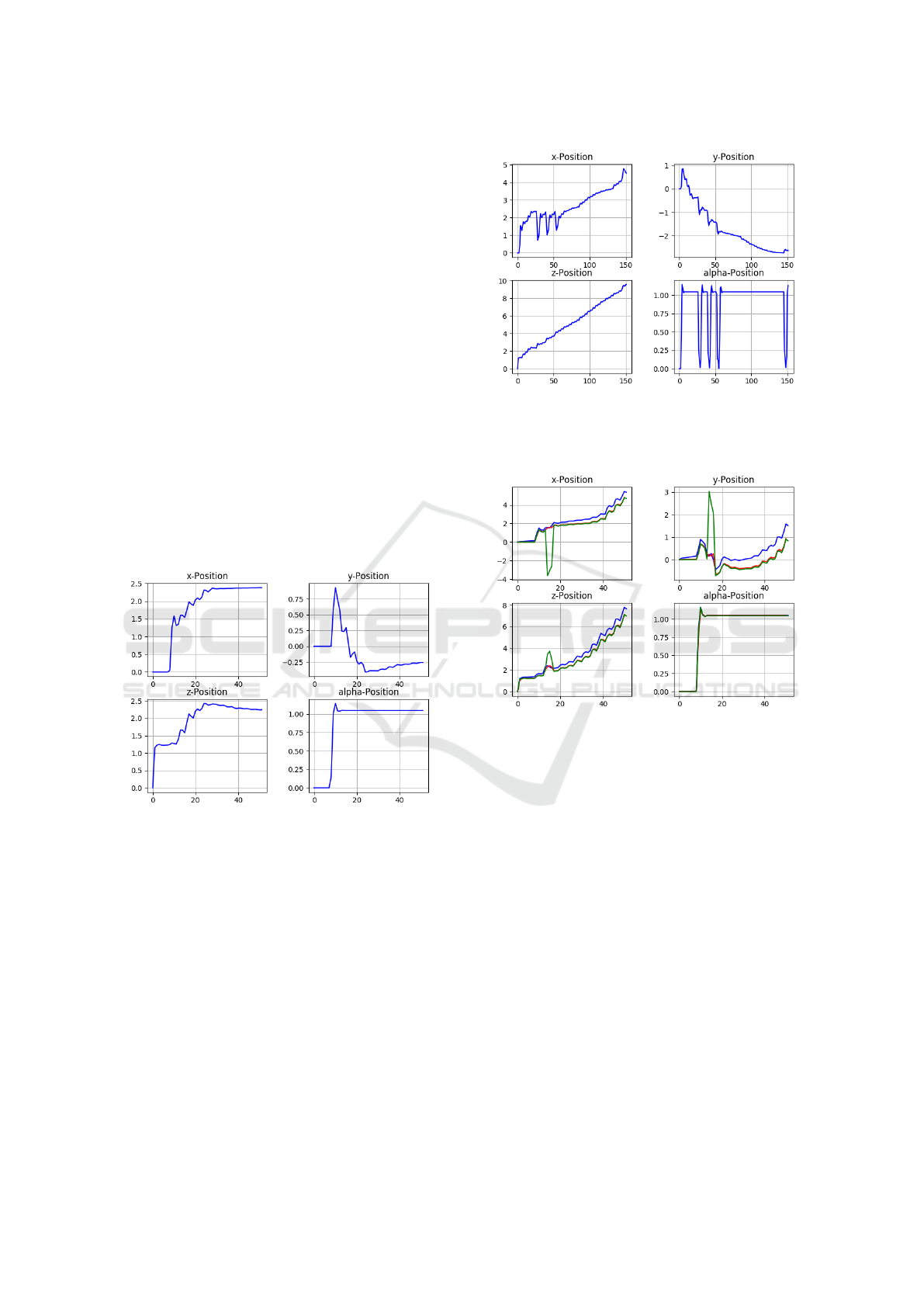
One problem that can occur during navigation is
the UAV getting stuck in a local minimum of the po-
tential field The obstacle that causes the minimum in
the potential field is shaped like the letter “U” (see
Fig. 3) Figure 9 shows the reaction to a u-shaped lo-
cal minimum trap when only using the potential field
method. The UAV is trapped around (2.5, -0.25, 2.5),
because of the u-shaped obstacle. The goal is set to
(5,-3, 10). The UAV can’t escape the trap using the
potential field method alone. This is why in the next
pass, the random walk method mentioned in the con-
cept was is performed to escape the minimum. Fig-
ure 10 shows the movement of the UAV with the same
goal as in figure 9, but with the implemented random
walk method. The random walk method caused the
UAV to fly out of the local minimum, which can be
mainly seen in the x position in figure 10. It took the
random walk strategy three tries to escape the local
minimum completely. After that, the potential field
method was used again to reach the acutal goal with-
out colliding with any obstacles.
Figure 9: UAV stuck in a local minimum at (2.5, -0.25, 2.5).
5.3 Evaluation of the Combined
Architecture
After evaluating the sensor fusion and the navigation
separately, a final test was used to evaluate the com-
bination of the two procedures. The UAV was given
multiple goals to fly to sequentially while using the
position estimation generated by the Kalman filter.
The filter was fed with a drifting IMU position and
tracking data that had jumps in it. Figure 11 shows
that the filtered position (red) is just slightly affected
by the drift in the odometry data (blue) or the jump
in the camera tracking (green). Despite the two poor
input signals, the UAV manages to reach all targets
within the specified precision of 0.3
˜
m.
Figure 10: UAV using the random walk method to escape
the local minimum at (2.5, -0.25, 2.5) by flying towards a
random temporary goal before continuing to the actual goal
at (5,-3, 10).
Figure 11: UAV flying to multiple viewpoints while getting
its position from faulty sensor data.
The evaluation has shown that the output of the
Kalman filter in combination with a prefilter for the
cameratracking improves the quality of the position
data compared to the use of a single sensor as a po-
sition source. Our flight control algorithm is capable
of reaching a sequence of waypoints while avoiding
static obstacles, even when using the position estima-
tion provided by the Kalman filter. It was also demon-
strated, that the algorithm can handle being stuck in a
local minimum of the potential field.
6 CONCLUSIONS
This paper covered the inspection of a large structure
like a ship hull. The addressed topics are sensor fu-
sion and vector flight control. To estimate the position
of the UAV the internal IMU and tracking from the in-
spection camera were used. These signals with differ-
UAV Inspection of Large Components: Indoor Navigation Relative to Structures
185

ent fault characteristics were fused by a Kalman filter.
The camera tracking signal was pre-filtered before it
was sent to the Kalman filter in order to filter out harsh
jumps in the tracked position. The estimated position
was fed to a vector flight control based on the poten-
tial field method, which allowed the UAV to reach a
sequence of inspection points without colliding with
obstacles in its environment. We also proposed a solu-
tion for the local minimum problem using the random
walk. In our evaluation we demonstrated that fusing
the two sensor values creates an estimate, that is ro-
bust to faulty inputs of one of the sensors. Addition-
ally we demontrated, that our navigation concept al-
lows the UAV to reach a sequence of inspection points
while avoiding surrounding obstacles. Finally it was
shown that the navigation works in conjunction with
the position estimate calculated by the Kalman filter.
In the future, we are planning on implementing the
proposed algorithms on real hardware. Additionally,
we plan on expanding the navigation to react to dy-
namic obstacles that are not known in advance. This
can be done by dynamically placing obstacles that are
detected by the UAV in the potential field and recal-
culating the force vecotor based on the new data. Fi-
nally, using a sensor that tracks the position of the
UAV relative to the part and not relative to a global
coordinate system, could allow the UAV to navigate
relative to the part even when it is in motion. This
would allow inspections of a structure while it is be-
ing craned from one assembly station to another one.
The feasability of this concept will have to be evalu-
ated in future work.
ACKNOWLEDGEMENTS
This work was created in collaboration with Kevin
Dittel, Teoman Ismail, Christian Adorian and
˚
Asa
Odenram from Premium AEROTEC GmbH.
REFERENCES
AG, D. B. Kompetenzcenter multicopter db. last accessed:
08.03.2021.
Chen, Y.-b., Luo, G.-c., Mei, Y.-s., et al. (2016). Uav
path planning using artificial potential field method
updated by optimal control theory. International Jour-
nal of Systems Science, 47(6):1407–1420.
Englot, B. and S. Hover, F. (2014). Sampling-based cov-
erage path planning for inspection of complex struc-
tures. ICAPS 2012 - Proceedings of the 22nd In-
ternational Conference on Automated Planning and
Scheduling.
Furrer, F., Burri, M., Achtelik, M., and Siegwart, R. (2016).
Rotors—a modular gazebo mav simulator framework.
In Robot operating system (ROS), pages 595–625.
Springer.
Kawabata, S., Nohara, K., Lee, J. H., et al. (2018). Au-
tonomous flight drone with depth camera for inspec-
tion task of infra structure. In Proceedings of the Inter-
national MultiConference of Engineers and Computer
Scientists, volume 2.
Koren, Y., Borenstein, J., et al. (1991). Potential field meth-
ods and their inherent limitations for mobile robot
navigation. In ICRA, volume 2, pages 1398–1404.
Labbe, R. R. (2021). Filterpy documentation. last accessed:
08.03.2021.
McAree, O., Aitken, J. M., and Veres, S. M. (2016).
A model based design framework for safety verifi-
cation of a semi-autonomous inspection drone. In
2016 UKACC 11th International conference on con-
trol (CONTROL), pages 1–6. IEEE.
Mohta, K., Sun, K., Liu, S., et al. (2018). Experiments
in fast, autonomous, gps-denied quadrotor flight. In
2018 IEEE International Conference on Robotics and
Automation (ICRA), pages 7832–7839. IEEE.
Santana, L. V., Brandao, A. S., Sarcinelli-Filho, M., and
Carelli, R. (2014). A trajectory tracking and 3d po-
sitioning controller for the ar. drone quadrotor. In
2014 international conference on unmanned aircraft
systems (ICUAS), pages 756–767. IEEE.
Sappington, R. N., Acosta, G. A., Hassanalian, M., et al.
(2019). Drone stations in airports for runway and air-
plane inspection using image processing techniques.
In AIAA Aviation 2019 Forum, page 3316.
Shen, S., Mulgaonkar, Y., Michael, N., and Kumar, V.
(2013). Vision-based state estimation and trajectory
control towards high-speed flight with a quadrotor. In
Robotics: Science and Systems, volume 1, page 32.
Citeseer.
Wan, E. A. and Van Der Merwe, R. (2000). The un-
scented kalman filter for nonlinear estimation. In Pro-
ceedings of the IEEE 2000 Adaptive Systems for Sig-
nal Processing, Communications, and Control Sym-
posium (Cat. No. 00EX373), pages 153–158. Ieee.
Wanninger., C., Katschinsky., R., Hoffmann., A., Sch
¨
orner.,
M., and Reif., W. (2020). Towards fully automated
inspection of large components with uavs: Offline
path planning. In Proceedings of the 17th Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics - Volume 1: ICINCO,, pages 71–80.
INSTICC, SciTePress.
Zhang, T., Chong, Z. J., Qin, B., et al. (2014). Sensor fu-
sion for localization, mapping and navigation in an in-
door environment. In 2014 International Conference
on Humanoid, Nanotechnology, Information Technol-
ogy, Communication and Control, Environment and
Management (HNICEM), pages 1–6.
Zolotukhin, Y. N., Kotov, K. Y., Mal’tsev, A., et al. (2013).
Using the kalman filter in the quadrotor vehicle tra-
jectory tracking system. Optoelectronics, Instrumen-
tation and Data Processing, 49(6):536–545.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
186
