
Improved Output Feedback Control of Constrained Linear Systems
using Invariant Sets
Ana Theresa F. O. Mancini, Tiago A. Almeida and Carlos E. T. D
´
orea
Dept. Computer Engineering and Automation, Lab. Computacional Methods for Control and Automation,
Universidade Federal do Rio Grande do Norte - UFRN, Natal-RN, Brazil
Keywords:
Linear Systems, Invariant Sets, Output Feedback, Constraints.
Abstract:
We propose an improved design method for output feedback control of discrete-time linear systems subject
to state and control constraints, additive disturbances and measurement noise. Output Feedback Controlled-
Invariant polyhedral sets are used to ensure that state and input constraints are satisfied all time. The control
strategy seeks to enforce the set of states consistent with the measured output into a closed ball around the
origin. The control input is computed through the solution of Linear Programming (LP) problems, whose goal
is to minimize the size of the ball one step ahead. Then, we use the optimization results to reduce the set
of admissible states, steering the state to a smaller ball around the origin. The improvement provided by the
proposed strategy is illustrated by numerical examples.
1 INTRODUCTION
The theory of positively invariant sets is an important
tool to deal with constrained control systems (Blan-
chini and Miani, 2015). Constraints arise naturally
in real-life control problems from physical limitations
on state, control and output variables, which can be
represented as convex polyhedral sets, in general.
A set is said to be positively invariant with respect
to a given system if any trajectory originated from this
set does not leave it. When considering state feed-
back control, if there exists a control action based on
the measured state that keeps the state trajectory in a
given set, such a set is said to be controlled-invariant
(Blanchini and Miani, 2015). Most known techniques
assume that the system state can be fully measured,
however this may not be possible in some applica-
tions. One then has to consider invariance under out-
put feedback.
In (Artstein and Rakovi
´
c, 2011) the notion of in-
variance with respect to output feedback under non-
parametric disturbances was proposed within a set
dynamics approach, in a more conceptual and gen-
eral framework. In (D
´
orea, 2009) an output feedback
structure was studied and conditions were defined to
check if a given polyhedral set can be made invari-
ant under output feedback. Such sets were said to
be Output Feedback Controlled-Invariant (OFCI). If
a set is OFCI, then, a suitable sequence of control in-
puts can be computed, based on the knowledge of the
measured output, in order to confine the state trajec-
tory therein. Using this concept, the computation of a
picewise affine (PWA) law using multiparametric pro-
gramming was proposed in (Dantas et al., 2018).
Model Predictive Control (MPC) techniques have
also been used to solve constrained problems via out-
put feedback as in (Lee and Kouvaritakis, 2000),
(Mayne et al., 2006), (Goulart and Kerrigan, 2007),
(Løvaas et al., 2008), (Subramanian et al., 2017).
Typically, a stabilizing state feedback gain and a full-
order linear observer to estimate the state are de-
signed, and a Robust Controlled-invariant (RPI) set
with respect to the error dynamics is computed.
Based on OFCI polyhedral sets, in a recent paper
(Almeida and Dorea, 2020) the authors proposed an
output feedback strategy for the regulation problem
in discrete-time linear systems subject to state and
control constraints, and unknown-but-bounded distur-
bances and measurement noise. Given an OFCI poly-
hedron included in the set of state constraints, a Lin-
ear Programming (LP) problem was set up in order
to compute a control action that enforces constraints
satisfaction and minimizes, one step ahead, a guaran-
teed distance from the admissible states to the origin.
A dynamic control strategy was also proposed, for
which an OFCI polyhedron is obtained for an aug-
mented system that comprises the system and com-
pensator states. By using the dynamic controller, the
566
Mancini, A., Almeida, T. and Dórea, C.
Improved Output Feedback Control of Constrained Linear Systems using Invariant Sets.
DOI: 10.5220/0010556705660573
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 566-573
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

uncertainty on the state is progressively reduced us-
ing information about the contraction of an invariant
set defined in the estimation error space.
In this paper, starting from the strategy proposed
in (Almeida and Dorea, 2020), we show that the un-
certainty on the state can be further reduced by using
information given by the solution of the LP problem.
By doing so, we can achieve faster convergence of
the state trajectory to a ball around the origin, which
is smaller than that obtained by (Almeida and Dorea,
2020), specially in the static output feedback case.
The improvement provided by the proposed strategy
is illustrated by numerical examples.
2 INVARIANT SETS
Consider the linear, time-invariant, discrete-time sys-
tem described by:
x(k + 1) = Ax(k) + Bu(k) + Ed(k),
y(k) = Cx (k) +η(k),
(1)
where x ∈ R
n
is the state vector, d ∈ R
r
is the distur-
bance, y ∈ R
p
is the measured output, η ∈ R
p
is the
measurement noise and k ∈ N is the sampling time.
The disturbance and the measurement noise are as-
sumed to be unknown but bounded to C-sets D ⊂ R
r
and N ⊂ R
p
, respectively. Moreover, the system is
subject to state and control constraints: x ∈ Ω
x
and
u ∈ U, where Ω
x
⊂ R
n
and U ⊂ R
m
are also C-sets. A
C-set is a convex and compact (closed and bounded)
set containing the origin.
The constraints on the state variables and control
inputs, and the bounds on disturbance and measure-
ment noise are given by the following convex polyhe-
dral sets containing the origin:
Ω
x
= {x : G
x
x ≤
¯
1}, U = {u : Uu ≤
¯
1},
D = {d : Dd ≤
¯
1}, N = {η : Nη ≤
¯
1},
(2)
with G
x
∈ R
g
x
×n
, U ∈ R
v×m
, D ∈ R
s×r
, N ∈ R
q×p
.
We now present some important definitions to
characterise invariant sets and invariance under out-
put feedback control.
Definition 2.1. Given λ, 0 ≤ λ < 1, the set Ω ∈ R
n
is said to be controlled-invariant with contraction rate
λ with respect to system (1) if ∀x ∈ Ω, ∃u ∈ U : Ax +
Bu + Ed ∈ λΩ, ∀d ∈ D (Blanchini, 1994).
If Ω is controlled-invariant then, for any initial
condition x(0) ∈ Ω, there exists a state feedback law
u(x(k)) satisfying the control constraints which is
able to keep the state trajectory of the controlled sys-
tem within λΩ,∀k ≥ 0, for all admissible disturbances
d ∈ D.
We now consider to accomplish constraints en-
forcement through output feedback control. Even
though the state of the system is not known exactly,
each measurement y carries information about its lo-
cation. Consider the set Y (Ω) ∈ R
p
, which con-
tains all admissible outputs y that can be associated
to x ∈ Ω:
Y (Ω) = {y : y = C x + η for x ∈ Ω, η ∈ N }. (3)
Consider also the set C (y(k)), which represents
the set of states compatible with each measurement
y(k) ∈ R
p
:
C (y) = {x : Cx = y − η, for η ∈ N }. (4)
Set-invariance under output feedback can be char-
acterized by the following definition (D
´
orea, 2009):
Definition 2.2. The set Ω is said to be Output Feed-
back Controlled-Invariant (OFCI) with contraction
rate λ, 0 ≤ λ < 1, with respect to system (1) if
∀y ∈ Y (Ω), ∃u ∈ U : Ax +Bu+Ed ∈ λΩ, ∀d ∈ D and
∀x ∈ Ω, η ∈ N such that Cx = y − η.
If Ω is OFCI with contraction rate λ, if x(k) ∈
Ω, then there exists a control u(y(k)) ∈ U, com-
puted from the measured output at time k, such that
x(k+1) ∈ λΩ, ∀k, in spite of the disturbance d(k) ∈ D
and noise η ∈ N .
In (D
´
orea, 2009), necessary and sufficient condi-
tions were established to check if a polyhedral set Ω
is OFCI with contraction rate λ.
The dynamic output feedback control strategy
used here employs state observers. The possibility of
confining the related estimation error into an invariant
set can be characterized by conditioned-invariant sets,
defined as follows:
Definition 2.3. (D
´
orea, 2009) The set Ω is said to
be conditioned-invariant with contraction rate λ, 0 ≤
λ < 1, with respect to system (1) if ∀y ∈ Y (Ω), ∃v :
Ax + v + Ed ∈ λΩ, ∀d ∈ D and ∀x ∈ Ω, η ∈ N such
that Cx = y − η.
In what follows, the invariant sets defined in this
section will be used to build an online optimization
strategy to compute an output feedback control able
to enforce state and control constraints and steer the
state trajectory to a as small as possible ball around
the origin.
3 OUTPUT FEEDBACK
CONTROLLERS
In this section, we describe the online optimization
strategy to compute static and dynamic output feed-
Improved Output Feedback Control of Constrained Linear Systems using Invariant Sets
567

back constrained controllers proposed in (Almeida
and Dorea, 2020), on which our approach is based.
3.1 Static Controller
Let Ω = {x : Gx ≤
¯
1} ⊂ Ω
x
, G ∈ R
g×n
be an OFCI
polyhedral set. We consider the solution to the fol-
lowing output regulation problem under constraints:
Based on the measurements y(k), ∀x(0) ∈ Ω ⊂ Ω
x
,
compute u(k) ∈ U such that x(k) ∈ Ω, ∀k ≥ 0, ∀d ∈
D, ∀η ∈ N , and x(k) converges to a small ball around
the origin B(ε).
From Definition 2.2, the design goal can be
achieved if x(0) belongs to the OFCI set Ω. From
Definition 2.2 and the set of admissible outputs (3), Ω
is OFCI with contraction rate λ if, and only if (D
´
orea,
2009),(Almeida and Dorea, 2020):
∀y ∈ Y (Ω), ∃u :G(Ax + Bu + Ed) ≤ λ
¯
1
Uu ≤
¯
1
∀x, η, d : y −Cx = η, Gx ≤
¯
1, Nη ≤
¯
1, Dd ≤
¯
1.
(5)
Since the disturbances acting on the system are
unknown, at a given step k, the input signal u(k) must
enforce the constraints for all d ∈ D. Also, as the state
at step k is not available, u(k) must enforce the con-
straints for all x ∈ Ω consistent with the output y(k).
That can be achieved by considering the worst case
row-by-row of G as follows (D
´
orea, 2009).
Let the elements of the vector φ(y) ∈ R
g
, which
depend on the current output, be defined by the solu-
tion of the following LP problems:
φ
j
(y) = max
x
G
j
Ax,
s.t. Gx ≤
¯
1, − NCx ≤ −Ny(k) +
¯
1
(6)
with j = 1, . . . , g, and let the elements of vector δ ∈ R
g
be given by the solution of the following LP prob-
lems:
δ
j
= max
d
G
j
Ed,
s.t. Dd ≤
¯
1,
(7)
with j = 1, . . . , g.
Considering (6) and (7) condition (5) can be
rewritten as:
∀y ∈ Y (Ω), ∃u ∈ U :
φ(y)
¯
0
+
GB
U
u ≤
λ
¯
1 − δ
¯
1
.
(8)
Besides constraints satisfaction, we also seek to
steer the state x to the smallest ball B(ε) around the
origin. To this end, we use the strategy of enforc-
ing the one-step evolution of the set of states consis-
tent with the measurement y(k) into the smallest ball
B(ε) = {x : Hx ≤ ε
¯
1}, where H =
I −I
T
. Then,
∀y ∈ Y (Ω), we must enforce:
H(Ax + Bu + Ed) ≤ ε
¯
1,
∀x, η, d : y −Cx = η, Gx ≤
¯
1, Nη ≤
¯
1, Dd ≤
¯
1.
(9)
Let ϕ(y) ∈ R
2n
be a vector whose components are
given by the solution of the following LP problems:
ϕ
j
(y) = max
x
H
j
Ax,
s.t. Gx ≤
¯
1, − NCx ≤ −Ny(k) +
¯
1
(10)
with j = 1, . . . , 2n and the vector γ ∈ R
2n
whose com-
ponents are given by:
γ
j
= max
d
H
j
Ed,
s.t. Dd ≤
¯
1
(11)
with j = 1, . . . , 2n.
Then, condition (9) can be then rewritten as:
∀y ∈ Y (Ω) : HBu − ε
¯
1 ≤ −ϕ(y) − γ. (12)
Now it is possible to compute a control action that
simultaneously satisfies state and control constraints,
ensuring output feedback invariance, and drives the
states consistent with the measured output to the
smallest closed ball around the origin. This control
action can be computed online from the solution of
the following LP problem:
u(y(k)) = arg min
u,ε
ε
s.t
GB
¯
0
U
¯
0
HB −
¯
1
u
ε
≤
¯
1 − φ(y(k)) − δ
¯
1
−ϕ(y(k)) − γ
.
(13)
For the online solution of problem (13), at each
time step k, from the current measured output y(k)
the vectors φ(y) and ϕ(y) are computed through the
solutions of (6) and (10). The vectors δ and γ do not
depend on the system evolution and should be com-
puted only once.
3.2 Dynamic Controller
Achieving output feedback invariance of a polyhedral
set is far from being an easy task. This is mainly
due to the fact that the set of states consistent with
a single measurement y(k) is, in general, very large.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
568

Hence, a control action u(k) able to enforce the one-
step evolution of this set of states into the polyhedron
does not always exist. In (D
´
orea, 2009) a state ob-
server structure was proposed to tackle this problem.
Once one has an estimate of the state x(k), and the
estimation error is bounded to another polyhedral set,
then, the set of admissible states can be significantly
reduced, making it easier to achieve output feedback
invariance.
In (D
´
orea, 2009), (Almeida and Dorea, 2020) the
following compensator structure is used:
z(k + 1) = v(z(k), y(k)),
u(k) = κ(z(k), y(k)).
(14)
System (1) under this compensator (14) can be
represented in an extended state space formulation:
ξ(k + 1) =
ˆ
Aξ(k) +
ˆ
Bω(k) +
ˆ
Ed(k)
ζ(k) =
ˆ
Cξ(k) +
ˆ
η(k)
(15)
where ξ =
x
z
is the extended state vector, ω =
u
v
is
the extended input vector, ζ =
y
z
is the extended out-
put vector,
ˆ
η =
η
0
is the extended noise vector and
ˆ
A =
A 0
0 0
,
ˆ
B =
B 0
0 I
,
ˆ
E =
E
0
,
ˆ
C =
C 0
0 I
.
Moreover, u(k) and v(k) are functions of the extended
output vector
y
z
as expressed in (14).
Control constraints and bounds on the measure-
ment noise for the extended system can be defined
over the extended space accordingly. Since (15) is a
linear system with the same structure as (1) the in-
put computation method illustrated previously can be
equally applied.
Consider now a pair of compact convex polyhe-
dral sets (S , V ), represented by: S = {x : G
s
x ≤
¯
1},
V = {x : G
v
x ≤
¯
1} and satisfying the assumption:
S ⊂ V ⊂ Ω
x
, S is conditioned-invariant and V is
controlled-invariant.
It turns out that the polyhedral set
ˆ
Ω below sat-
isfies a necessary condition for output feedback in-
variance with respect to the augmented system, being
simultaneously controlled and conditioned-invariant
(D
´
orea, 2009).
ˆ
Ω =
x
z
:
G
v
¯
0
G
s
−G
s
| {z }
ˆ
G
x
z
≤
¯
1
¯
1
(16)
where G
v
∈ R
g
v
×n
, G
s
∈ R
g
s
×n
and
ˆ
G ∈ R
(g
v
+g
s
)×2n
.
If we interpret the compensator state z(k) as an
estimate of the system state x(k ), then the estimation
error is bounded by the conditioned-invariant set S ,
for G
s
(x − z) ≤
¯
1.
The compensator structure (14) is quite general,
allowing the design of nonlinear observers. However,
as discussed in (Almeida and Dorea, 2020), there is
no evidence that such a nonlinear observer would per-
form better than a linear one. Then, a linear observer
has been adopted as follows:
z(k + 1) = Az(k)+ Bu(k) + L[y(k) − ˆy(k)] (17)
where ˆy = Cz(k) is the estimated output and the ob-
server gain L ∈ R
n×p
is a parameter to be designed so
that the eigenvalues of (A−LC) lie inside the complex
unit disc.
The estimation error dynamics e(k) = x(k) − z(k)
is given by:
e(k + 1) = A
e
e(k) + E
e
d
e
(k) (18)
where A
e
= A − LC, E
e
=
E − L
and d
e
(k) =
d(k)
η(k)
. Bounds on the additive disturbance d
e
can
be easily obtained combining the bounds on d and η.
Given the stabilizing observer gain L, one must
compute an invariant polyhedron S with respect to
(18). A natural choice is the minimal Robust Pos-
itively Invariant (mRPI) set (Rakovic et al., 2005),
which is the smallest invariant set of (18) comply-
ing with the disturbances. Let, then S
m
be the mRPI
of (18) with contraction rate λ
m
, which can be com-
puted using the algorithm proposed in (Rakovic et al.,
2005). It will be used to compute a pair (S
m
, V ) that
composes an OFCI polyhedron
ˆ
Ω (16) .
A natural choice for V is the maximal controlled-
invariant set contained in Ω
x
, which can be computed
using the algorithm proposed in (D
´
orea and Hennet,
1999).
The set of admissible initial states is given by the
projection of
ˆ
Ω onto the state space. With the aim of
enlarging this set, S is scaled up to α
∗
S, with α
∗
=
max
α≥1
α such that
ˆ
Ω remains OFCI.
In (Almeida and Dorea, 2020) it is also shown
that it is possible to compute offline a strictly decreas-
ing sequence {
¯
α(k)}, k = 0, 1, . . . ,
¯
k
m
, starting from
¯
α(0) = α
m
, where
¯
k
m
is the smallest value of k such
that
¯
α(k) ≤ 1. Hence, we have that e(k) ∈
¯
α(k)S
m
for
k <
¯
k
m
and e(k) ∈ S
m
for k ≥
¯
k
m
. This information
is used in the control action computation in order to
progressively reduce the uncertainty on the state x(k).
Then, as long as the pair (α
m
S
m
, V ) forms an
OFCI polyhedron, u(k) can be computed similarly as
Improved Output Feedback Control of Constrained Linear Systems using Invariant Sets
569

in (13), but with G replaced by G
v
and φ(k) and ϕ(k)
given by:
(
φ
j
(k) = max
x
G
v j
Ax, j = 1, . . . , g
v
ϕ
j
(k) = max
x
H
j
Ax, j = 1, . . . , 2n
(19)
s.t.
G
v
G
s
x ≤
¯
1
¯
α(k)
¯
1 + G
s
z(k)
, −NCx ≤ −Ny(k)+
¯
1.
It has been shown through numerical examples in
(Almeida and Dorea, 2020) that the strategy described
above is, in general, less conservative than MPC ap-
proaches based on linear observers, in terms of ob-
taining larger sets of admissible initial states. How-
ever, no performance assessment was presented. In
the next section we propose an improvement of the
strategy aiming at speeding up the convergence of the
state trajectories to a guaranteed smaller ball around
the origin.
4 IMPROVED STATE
TRAJECTORY OPTIMIZATION
The difficulty in optimizing performance via output
feedback under constraints lies in the fact that a sin-
gle control action must cope with constraint satisfac-
tion of a set of states consistent with the measure-
ment. This is specially difficult in the static feedback
case, where only the present output measurement is
available. The optimization strategy described in the
previous section minimizes one step ahead the worst
case distance from the set of states consistent with the
measurement to the origin. Here, we propose to use
the solution of the optimization problem in order to
further reduce the set of possible states and, as a con-
sequence, improve the convergence of the states to a
smaller ball around the origin.
Let ε(k + 1) be the optimal solution of the LP
problem (13). Then, from (9), one can see that:
x(k) ∈ B(ε(k)) (20)
This information can now be added to the compu-
tation of the vectors φ(y) and ϕ(y) to further reduce
the uncertainty on x(k), as follows:
(
φ
j
(k) = max
x
G
j
Ax, j = 1, . . . , g
ϕ
j
(k) = max
x
H
j
Ax, j = 1, . . . , 2n
(21)
s.t. Gx ≤
¯
1, Hx ≤ ε(k)
¯
1,
−NCx ≤ −Ny(k) +
¯
1.
For the dynamic output feedback control the vec-
tors φ(y) and ϕ(y) with the additional constraint are
given by:
(
φ
j
(k) = max
x
G
v j
Ax, j = 1, . . . , g
v
ϕ
j
(k) = max
x
H
j
Ax, j = 1, . . . , 2n
(22)
s.t.
G
v
G
s
H
x ≤
¯
1
¯
α(k)
¯
1 + G
s
z(k)
ε(k)
¯
1
,
−NCx ≤ −Ny(k) +
¯
1.
This way, our proposed optimization problem
guarantees that the set of states x(k) consistent
with the measured output y(k) belongs to both the
controlled-invariant set, by forcing Gx ≤ 1 in (21) (if
Ω is OFCI) and G
v
x ≤ 1 in (22) (if the par (V , α
m
S
m
)
is OFCI), and the closed ball B(ε(k)). As a result,
the set of states consistent with the measurements be-
comes smaller improving, therefore, the performance
of the controller.
It is worth mentioning that, for the dynamic feed-
back case, we are able to compute offline the decreas-
ing sequence
¯
α, which defines the contraction rate of
the invariant sets related to the estimation error, based
on λ
m
. On the other hand, we do not have the same
previous information for the state x(k). We have to
compute ε(k) online because the closed ball B(ε) is
not an invariant set, then, there is no defined contrac-
tion rate.
5 NUMERICAL EXAMPLES
Example 5.1. (Static feedback) Consider the lin-
earized discrete-time system (1) obtained for a two
coupled-tank system (Martins et al., 2014), that can
be seen in Figure 1, for which:
A =
0.9448 0
0.0537 0.9448
, B =
0.1357
0.0028
;
E =
0
0
; C =
0 1
(23)
State and control constraints are given respec-
tively by:
Ω
x
= {x : |x
i
| ≤ 15, i = 1, 2}, U = {u : |u| ≤ 4} (24)
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
570

Figure 1: Coupled-tank system.
The measurement noise is bounded by: N = {η :
|η| ≤ 0.05}. The system is not subjected to distur-
bances.
A λ
v
-contractive controlled-invariant set V con-
tained in Ω
x
with a contraction rate of λ
v
= 0.95 was
computed. It was verified that V is also OFCI with
contraction rate λ = 0.9876. Then, a static output
feedback can be computed to enforce state and con-
trol consraints.
State vector trajectories resulting from the static
controller with and without the additional constraints
(13) are shown in Figure 2. It is possible to see that
the state trajectory resulting from the control action
using the additional constraint reaches a smaller ball
around the origin and is faster than the one resulting
from the controller proposed in (Almeida and Dorea,
2020).
Figure 2: State vector trajectories inside Hx ≤ ε(k)
¯
1 for k =
3 and k = 100.
In Figure 3 it is also possible to see that when con-
sidering the additional constraint the state trajectory is
associated to a sequence with smaller values of ε(k).
We can also see that, as the system is not affected by
disturbances, then ε(k) tends to 0.
0 10 20 30 40 50 60 70 80 90 100
k
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure 3: Evaluation of ε(k).
Example 5.2. (Dynamic controller) Consider the
discrete-time system (1) for which (Almeida and
Dorea, 2020):
A =
0.745 −0.002
5.61 0.780
, B =
−5.6 · 10
−4
0.464
, E = I
2
,
C =
1 0
(25)
State and control constraints are given respec-
tively by:
Ω
x
= {x : |x
1
| ≤ 0.4, |x
2
| ≤ 15}, U = {u : |u| ≤ 10}
(26)
Bounds for disturbance and measurement noise
are given by: D = {d : |d
1
| ≤ 0.02, |d
2
| ≤ 0.4} and
N = {η : |η| ≤ 0.1}.
A λ
v
-contractive controlled-invariant set V con-
tained in Ω
x
with a contraction rate of λ
v
= 0.99 was
computed. The gain L =
0.728 5.610
T
was de-
signed for the observer, to result in the eigenvalues of
A − LC at 0.017 and 0.780. An approximation of the
mRPI S
m
was then computed with λ
m
= 0.99. It was
checked that the pair (V , S
m
) forms an OFCI polyhe-
dron with respect to the extended system (15).
State trajectories resulting from the dynamic con-
troller with and without the additional constraints
(22), starting from x(0) =
0.4 15
, with z(0) =
0.1 10
, under random disturbance and noise, are
shown in Figure 4 illustrating that state constraints are
satisfied. It also shows the closed balls Hx ≤ ε(k)
¯
1
for k = 3 and k = 50. We can see that the final set
is smaller in the trajectory considering the additional
constraint.
Improved Output Feedback Control of Constrained Linear Systems using Invariant Sets
571
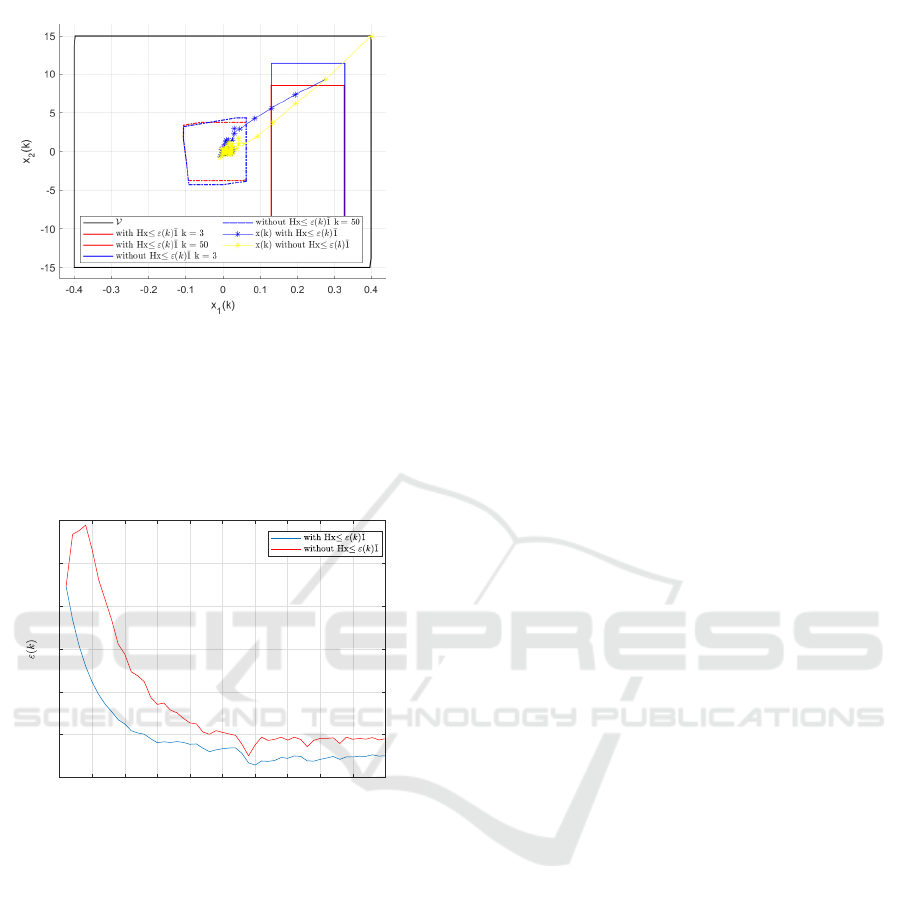
Figure 4: State vector trajectories inside Hx ≤ ε(k)
¯
1 for k =
3 and k = 50.
The property of keeping the state trajectory in
smaller sets for each sample k can also be seen in Fig-
ure 5. When considering the additional constraint the
state trajectory is associated to a sequence of smaller
values of ε(k).
0 5 10 15 20 25 30 35 40 45 50
k
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Figure 5: Evaluation of ε(k).
6 CONCLUSIONS
In this work, an improved design method for out-
put feedback control for constrained, linear, discrete-
time systems subject to persistent disturbances was
proposed using the concept of Output Feedback
Controlled-Invariance (OFCI) sets.
A modification was proposed in the algorithm of
(Almeida and Dorea, 2020) in order to further re-
duce the set of states consistent with the measure-
ment, by taking into account the results of an opti-
mization problem solved in the previous step.
Both static and dynamic controllers were consid-
ered. The performance improvement of the modi-
fied controller was illustrated through numerical ex-
amples, being more remarkable in the static case.
Future work must consider using a set which is
homothetic with respect to the controlled invariant set
as a target, in order to guarantee ultimate boundedness
of the state trajectories.
ACKNOWLEDGEMENTS
This study was financed in part by the Coordenac¸
˜
ao
de Aperfeic¸oamento de Pessoal de N
´
ıvel Superior –
Brazil (CAPES) – Finance Code 001, and by the Na-
tional Council for Scientific and Technological Devel-
opment - Brazil (CNPq), grant #309862/2019-1.
REFERENCES
Almeida, T. A. D. and Dorea, C. E. T. (2020). Output
feedback constrained regulation of linear systems via
controlled-invariant sets. IEEE Transactions on Auto-
matic Control, pages 1–1.
Artstein, Z. and Rakovi
´
c, S. V. (2011). Set invariance under
output feedback: a set-dynamics approach. Interna-
tional Journal of Systems Science, 42(4):539–555.
Blanchini, F. (1994). Ultimate boundedness control for
uncertain discrete-time systems via set-induced lya-
punov functions. IEEE Transactions on Automatic
Control, 39(2):428–433.
Blanchini, F. and Miani, S. (2015). Set-theoretic methods in
control. Birkh
¨
auser, 2 edition.
Dantas, A. D. O. S., Dantas, A. F. O. A., and D
´
orea, C.
E. T. (2018). Static output feedback control design
for constrained linear discrete-time systems using data
cluster analysis. IET Control Theory Applications,
12(18):2541–2550.
D
´
orea, C. E. and Hennet, J. C. (1999). (A, B)-
invariant polyhedral sets of linear discrete-time sys-
tems. Journal of Optimization Theory and Applica-
tions, 103(3):521–542.
D
´
orea, C. E. T. (2009). Output-feedback controlled-
invariant polyhedra for constrained linear systems. In
Proceedings of the 48h IEEE Conference on Decision
and Control (CDC) held jointly with 2009 28th Chi-
nese Control Conference, pages 5317–5322.
Goulart, P. J. and Kerrigan, E. C. (2007). Output feedback
receding horizon control of constrained systems. In-
ternational Journal of Control, 80(1):8–20.
Lee, Y. I. and Kouvaritakis, B. (2000). Receding horizon
output feedback control for linear systems with input
saturation. In Proceedings of the 39th IEEE Confer-
ence on Decision and Control (Cat. No.00CH37187),
volume 1, pages 656–661 vol.1.
Løvaas, C., Seron, M. M., and Goodwin, G. C. (2008).
Robust output-feedback model predictive control for
systems with unstructured uncertainty. Automatica,
44(8):1933–1943.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
572

Martins, R., Vale, M., and Maitelli, A. (2014). Hybrid
methods for detection and identification of faults in
dynamic systems. Asian Journal of Control, 17.
Mayne, D., Rakovi
´
c, S., Findeisen, R., and Allg
¨
ower, F.
(2006). Robust output feedback model predictive
control of constrained linear systems. Automatica,
42(7):1217–1222.
Rakovic, S. V., Kerrigan, E. C., Kouramas, K. I., and
Mayne, D. Q. (2005). Invariant approximations of the
minimal robust positively invariant set. IEEE Trans-
actions on Automatic Control, 50(3):406–410.
Subramanian, S., Lucia, S., and Engell, S. (2017). A novel
tube-based output feedback mpc for constrained lin-
ear systems. In 2017 American Control Conference
(ACC), pages 3060–3065.
Improved Output Feedback Control of Constrained Linear Systems using Invariant Sets
573
