
Integrating ROS and Gazebo Tools with a Network Security Module
to Support Secure Autonomous Robot Coordination
Mattia Giovanni Spina, Stefano Gualtieri and Floriano De Rango
a
Department of Computer, Modeling, Electronics and Systems Engineering (DIMES), University of Calabria,
Via P. Bucci, Rende, Italy
Keywords: Robot Coordination, Security, ROS, Gazebo, Autonomous Robots.
Abstract: Multi-robots system coordination is an important aspect to consider when complex task needs to be
performed. Even if robots are becoming always more autonomous, the collective behaviour and coordination
strategy can improve the overall performance in terms of execution time increasing the robustness of the
mission. However, few works addressed the issue of the network security related to the coordination strategy
and the current modelling and simulations tools are not ready to model security aspects that can affect the task
execution and in some case can compromise the mission The following paper proposes the integration of
some additional module on well-known tools such as ROS and GAZEBO in order to extend the modelling
aspects also on emerging trends to support technicians to evaluate the coordination strategies also form the
security point of view.
1 INTRODUCTION
Robot coordination and multi-robot applications are
gaining a lot of interest in these last years. Involving
more robots in missions or complex tasks has been
shown to produce many benefits in terms of success
of the mission or in terms or reduction of the overall
task execution time. A lot of attention in literature has
been given in these years about the coordination
strategy combining explicit coordination among
robot or implicit coordination. However, in our
opinion, a too few attentions have been given to
security aspects related to the robot coordination.
Even if a lot of work has been done on SLAM
technique (Park and Lee, 2017) to improve the
localization and perception of a surrounding
environment in a robot and also if some protocol to
distribute among robots partial built maps of the
surrounding environment, no attention has been
focused on some possible threats can be arise when a
robot can behave maliciously or some attacks can be
performed to degrade or compromise the task
execution.
The main contributions of this paper are listed below:
1. Network Layer Design: this contribution is
related to the introduction of a network layer in
a
https://orcid.org/0000-0002-3882-1678
ROS where all communication paradigm
supported is a publish/subscribe that is an
application layer mechanism. In our case we
simulated a network layer adopting an
application layer paradigm. This has been led
out introducing the channel model, the
communication range and the routing layer to
build the robot topology on the basis of the
exchanged packets. The main faced issues have
been the mapping of network functionalities at
the application layer to simulate the network
services.
2. Security Feature Design: ROS and Gazebo do
not consider any network security features.
This means that it is possible to model only
some robot characterization such as movement
and map building but it is not possible to
consider possible security threats related to
robotic applications. In future situations where
multi-robot systems can be involved in
complex tasks, the network security in the
robot communications and data sharing can be
a key issue to face because some critical
operations could be compromised. This means
that considering the current state of the art for
the mentioned simulators, security is not
supported (Rivera et al., 2019) (Mukhandi et
Spina, M., Gualtieri, S. and De Rango, F.
Integrating ROS and Gazebo Tools with a Network Security Module to Support Secure Autonomous Robot Coordination.
DOI: 10.5220/0010566303690377
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 369-377
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
369

al., 2019). At this purpose, some basic security
features for supporting authentication, integrity
check and encryption have been introduced and
integrated in the simulation and modeling
framework. More details on the network
security aspects will be presented in the next
sections.
All the proposal has been implemented integrating
two simulators such as ROS (Robot Operating
Systems) and GAZEBO that works at application
layer. The paper is organized as follows: section 2
presents the work in literature related to robot
coordination for unknown area discovery and
recruiting tasks; section 3 presents the main tools
adopted in our proposal to simulate map building of
the unknown area and robot coordination; section 4
introduces all modules and robot models considered
in our framework; the communication protocols and
modules for the recruiting task and robot coordination
are described in section 5; some security features and
threats are presented in section 6 and finally
conclusions are summarized in the last section.
2 RELATED WORK
Coordination of multi-robot systems received much
attention in recent years due to its vast potential in real
world applications. Simple robots work together to
accomplish some tasks. However, the execution of
complex task sometimes needs to involve multiple
robots. In this last case, robot coordination become an
essential point to guarantee. To perform this objective
the communication among robots is a key element to
consider and also possible threats to the
communication should be accounted. Robots’
coordination strategies can be broadly divided into
two main categories: explicit coordination and
implicit coordination.
Explicit coordination refers to the direct exchange of
information between robots, which can be made in the
form of the unicast or broadcast of intentional
messages. This often requires a dedicated on-board
communication module.
Existing coordination methods are mainly based
on the use of explicit communication that allows the
accuracy of the exchange of information among the
robots’ swarm (De Rango et al.,2018), (Tropea et
al.,2019). Instead, implicit coordination is usually
associated with implicit communication, which
requires the explorative robots to perceive, model,
and reason others’ behavior. In this case, an
individual robot makes independent decisions on how
to behave, based on the information it gathers through
its own perception with others. When the robots use an
implicit communication to coordinate, although the
information obtained by the robots is not completely
reliable, and the stability, reliability, and fault tolerance
of the overall system can be improved (Palmieri et al.,
2019), (Palmieri et al., 2018). However, in this last
case, an increase in the execution task among robots
can be observed. In our case we are interested in hybrid
approach where robots applying SLAM can move and
perceive the environment independently through its
sensors, but it can also receive information about
neighbor robots about part of the map already built by
them in order to speed up the overall task of unknow
space discovery.
Main contributions in comparison with the state
of the art are related to the integration of multiple
well-known tools for the robots modeling and
simulations with some modules to account for the
energy consumption, network layer modeling for
supporting the topology discovery and for the security
features to apply in the communication to reinforce
the explicit coordination mechanism. These two
aspects are essential to model and simulate real
context where robots can move and where some
threats can be present that can compromise the overall
mission.
3 SIMULATION TOOLS
Different tool and technologies have been applied to
implement our simulation scenario of robots under
security threats and coordination strategies.
3.1 Robot Operating System (ROS)
Robot Operating Systems (ROS) (Gatesichapakorn et
al., 2019) is a framework for the design and
programming of robot. It can create a robot network
where many processes can be connected. Moreover,
it offers all functionalities to design a distributed
system providing also services typical of an operative
system (OS) such as: hardware abstraction, device
controller through drivers, process communication,
application management (package) and other
features. Processes inside ROS can be represented
through graph structure where nodes can send,
receive and route messages coming from other nodes.
Nodes can also be sensors and/or actuators. Some
basic elements of ROS are recalled in the following:
1. Roscore: it is the master node that provides the
names registration and the discovery service of
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
370

the other nodes. It can also set the connections
among nodes. If this node is not instantiated, no
communication is allowed among nodes.
2. Nodes: These are the entities that can store data
or computing tasks. Every process that needs to
interact with other nodes inside the ROS
network needs to be instantiated as a node and
it should be connected to the master node
(Roscore). In our case, robots are represented
by nodes.
3. Messages: they are the structure that represent
the messages exchanged among nodes. ROS
presents different default messages. However,
it is possible customize new messages with
additional info.
4. Topic: When a node sends data, it needs to
publish data on a particular data structure called
topic. It is like a publish/subscribe paradigm
where nodes can exchange data publishing
their data and other nodes can receiver these
data if they subscribe on the same topic. This
paradigm allows a separation between data
generation and data consumption.
3.2 Gazebo
Gazebo is an open-source 3D robotic simulator (Raje
and Sumit, 2020). It integrates the dynamic physic
engine called ODE (Open Dynamic Engine) that is
written in C/C++. It is equipped with a rendering tool
in OpenGL and it provides code to support robots,
sensors and actuators simulator. It supports a high-
resolution realistic rendering of the environment
where robots can move including lights and shadows
in the image detected by cameras. It can model
sensors that can perceive the surrounding
environment such as laser sensors, cameras (with the
large angle view) and sensors such as Microsoft
Kinect. Gazebo is very useful for robotic modeling
applications allowing also complex and detailed
simulations. A well-designed simulator allows to
quickly test algorithms, to design robots, to execute
regression test and to train artificial intelligence
systems using realistic scenarios. Gazebo offers the
possibility to simulate with high precision and
efficiency multi-robot systems for complex indoor
and outdoor environments. It can be integrated with
ROS through the package Gazebo-ROS.
3.3 Slam-Gmapping: Navigation
It is a module able to simulate the robot’s movement
applying the Gmapping technique (Abdelrasoul et al.,
2016). This last one is a highly efficient Particle Filter
technique such as Rao-Blackwellized designed to re-
build a map on the basis of data received by specific
sensors such as Laser whose robot is equipped. These
filters have been recently introduced to face issues
such as SLAM (Simultaneous Localization and
Mapping) (Ibáñez et al., 2017). In this approach, each
particle maintains an individual environment map.
This specific technique has the objective to reduce the
uncertainty related to robot location and it is
optimized for long-range laser sensors.
SLAM represents a process that allows a robot to
move in an unknown environment building at run-
time an environment map localizing itself inside the
MAP. It applies well-known techniques such as
Kalman filter, Covariance Intersection and
GraphSLA. SLAM algorithms can be applied and
adapted on the basis of the available resources in
order to reach a targeted objective. SLAM can be
applied in many robotic applications involving UAV,
underwater rovers or home robots. The module
supporting SLAM can be very useful for our purpose
because we can model the robot movement avoiding
collision during the movement and focusing more on
other objectives such as security or coordination
strategies. SLAM will support the robot navigation
system supporting a robot in detecting its position in
the reference frame related to the map and to plan a
path toward a target position. A robot to move needs
of an environment representation building a map and
interpreting correctly all info included in this map
representation. Even if in many applications the robot
can move with pre-loaded maps, in our case, we
applied SLAM to build MAP at run-time on the basis
of data collected by sensors.
4 MODULES AND
COMPONENTS FOR THE
ROBOT ASSESMENT
In the following sub-sections all modules and tools
adopted to simulate robots, sensors and environment
where robots move will be briefly presented.
4.1 Turtlebot 3
It is considered in our evaluation the Turtlebot3 robot
such as presented in (ROS.org “About Turtlebot 3”).
It represents a low-cost robot with open-source
control software and based on ROS environment. It is
often used in the academic environment, in the
research field and for prototyping embedded
solutions. TurtleBot3 can be customized and it is
Integrating ROS and Gazebo Tools with a Network Security Module to Support Secure Autonomous Robot Coordination
371
possible to extend its basic functionality introducing
additional modules focusing on specific target and
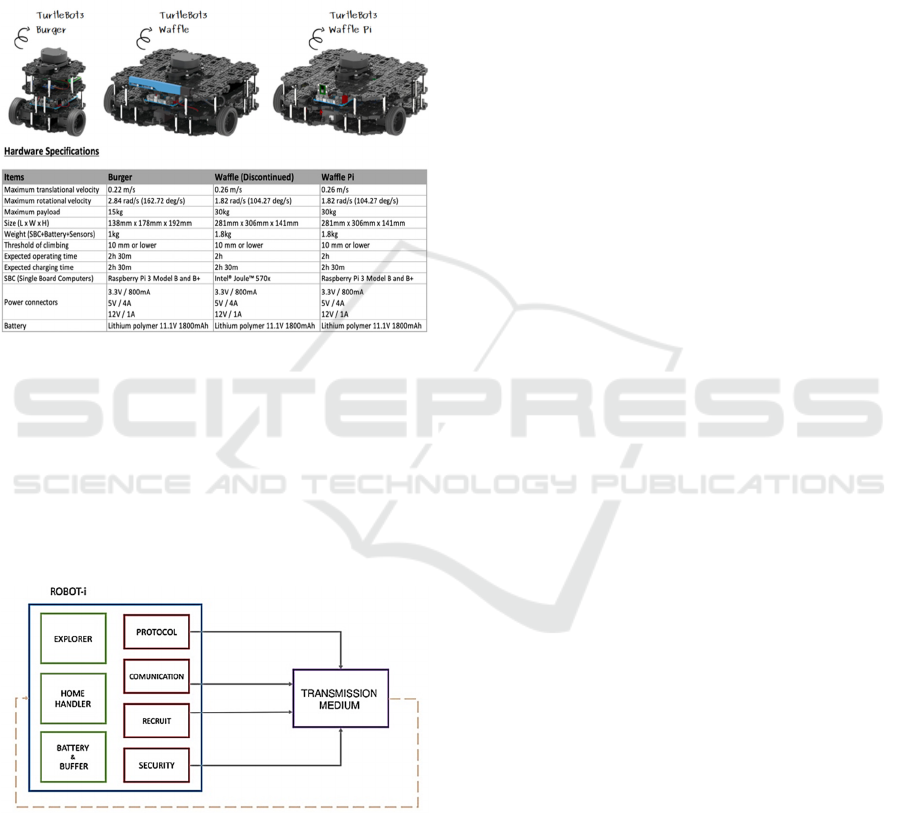
actions. The basic features include three different
versions: Burger, Waffle and Waffle Pi. Each of these
versions present different physical and technical
characteristics. In our case we considered the first one
because on the basis of its characteristics it can
present a lower energy consumption prolonging more
the battery lifetime such as shown in Figure 1.
Figure 1: Three types of Turtlebot.
4.2 Modules
The robot has been designed considering a modular
approach. This means that each robot is composed by
a set of modules executing specific tasks. Each
module has been implemented in Python and a
conceptual scheme of all modules implemented are
presented in Figure 2 below.
Figure 2: Block diagram of modules implemented in ROS.
The channel module has been designed to simulate
the physical channel that allow the communication
among nodes. In our case we considered this channel
as a broadcast wireless channel able to simulate
collisions, transmission and propagation delay in the
data forwarding. Through this channel module it is
possible to monitor all packets that travel on the
network and this will be useful in the security analysis
that will be presented in the next sections.
The specific component included in the robot model
are now briefly introduced:
1. Explorer Component: It is the module that
manages the exploration task. It is an important
module that allows the exploration of unknown
or known spaces in an autonomous way. It
allows the implementation of exploration
strategy that can use local knowledge of cells to
explore or novel points where to move.
Moreover, this module is connected with all the
other components coordinating the other
modules.
2. Battery-Buffer Component: it is an internal
module for the management of the battery and
the message buffer. It is considered in our case
a simple battery discharge model that considers
the time as variable to reduce the energy. On the
other hand, the buffer is considered to store
video frame produced by cameras on robot
about the surrounding environment. In our case,
it is considered a simple model to save a number
of frames proportional to the travelled distance.
3. Security Manager Component: it is the
module designed to manage all security
features. It manages the authentication, the
cryptography to support the confidentiality in
the data forwarding and the key negotiation and
exchange. In our case we considered ephemeral
keys and this means that the adopted keys are
applied for a limited amount of time and then
they need to be re-generated and exchanged
again. This approach has been used to mitigate
the key leak issue.
4. Home Handler Component: this module
manages the charging stations for robots. It is
essential because it allows robots to come back
home when their resources are exhausting. After
coming back to some of deployed base stations,
they can re-charged and it is possible also to
download all frames produced and stored during
the exploration.
5. Protocol Component: this module allows the
neighbor discovery and the topology table
update. The neighbor discovery is useful to
understand in a given time which robots are
directly connected to a specific robot. The
topology table building and propagation is
important instead to build the overall topology.
This last one is essential when we need to
involve/recruit some robots in more complex
tasks. Through these two submodules is possible
to maintain in the time the robots’ topology
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
372
under dynamic condition such as robot
movements.
6. Recruit Component: it is a key component
because it focused on the logic to recruit other
robots on the basis of the perceived environment
and on the basis of the task to be executed. It is
also related to the communication protocol that
can be implanted and it can affect the overall
performance of the coordination and
cooperation strategy.
7. Communication Component: it is related to
the communication protocol and to the
periodical data forwarding to let other robots
know about neighbors and already explored
maps. The communication strategy is based on
the communication protocol selected and it is
related to the module presented above. This
module used in a joint way with the protocol
module are useful to reduce the exploring task
because they try to reduce the overlapping in the
exploration among robots.
5 COMMUNICATION NETWORK
LAYER PROTOCOLS
In order to model the topology table building and
propagation, it has been designed a network layer
protocol based on the publish-subscribe paradigm.
This choice has been determined by the basic
programming module implemented in ROS tool.
Avoiding to violate this basic feature offered by the
tool, we implemented a network layer adopting this
novel paradigm but considering all physical
conditions in the data propagation such as channel
modules (such as explained in the previous section),
radio propagation range etc. For our purposed we
considered a modified and enhanced version of the
Link State routing protocol where some metrics such
as residual energy, buffer space and robot distance
has been considered to build the robot connectivity
graph. The link-state based topology has been
essential to offer the possibility to the robot to recruit
other robots in order to cooperatively explore a
specific area reducing the exploration task time. In
addition to the link-state protocol, it has been
considered also another simple approach to recruit
robots that is based on a progressive recruiting
request forwarding. This recruiting protocol has been
called expanding ring - recruiting request protocol
because it propagates the recruit request considering
an incremental hop in the propagation whereas the
target number of robots to be recruited is not reached.
5.1 Link State Routing Module
The routing protocol implemented in the routing
module is the link state (LS). It is a protocol that
supports a local periodical update to build the
neighbor table and an event driven topology update
forwarded in broadcast to all robots to build an overall
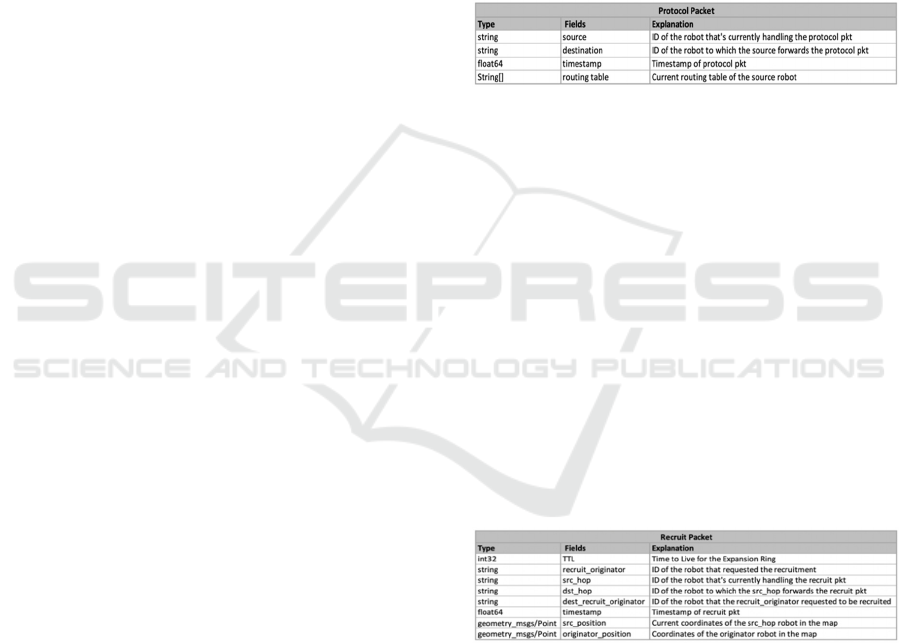
consistent topology. The Link State Update (LSU)
packet considered for our purpose brings some
information useful for the specific coordination task
such as robot coordinates (X,Y), residual energy,
timestamp, sequence number etc.
Table 1: Some protocol packets field in the LS protocol.
Some fields included in the recruiting protocol are
presented in table II.
The protocol uses Dijkstra to build the minimum
spanning tree among robots. The metric adopted is the
minimum hop count and the residual energy is
important to evaluate if the recruited robot has
enough energy to reach the target position where to
perform the task. The routing module is flexible and
it is possible to select the local broadcast for updating
the neighbor table and it is possible to establish also
the metric to build the minimum spanning tree. This
module is connected with the security module when
some protection mechanism is applied in the LSU or
HELLO packet (local broadcast) update.
In the following some fields included in the link-state
routing protocol are presented.
Table 2: Protocols packet fields in the recruiting protocol.
5.2 Expanding Ring: Recruiting
Request
This strategy consists in forwarding the recruit
request at the beginning setting the TTL=1. This
allows a propagation of the recruit request just on the
first ring and on the direct neighbors. If no robots are
available to be recruited, after the recruit request
timeout, a novel request is sent with TTL=2 and so
on. This will allow to reach farer robots using
Integrating ROS and Gazebo Tools with a Network Security Module to Support Secure Autonomous Robot Coordination
373

intermediate robots to forward the recruit requests.
Two possible recruiting requests are possible:
Specific Recruit Request: a robot can recruit
another robot that, after accepting the request,
will move towards the position indicated by the
recruiter.
General Recruit Request: a robot can recruit
another robot that is at the base station to
recharge. This request will activate a robot that
was inactive at the base station.
On the basis of the recruiting requests presented
above, two conditions have been considered to be
managed:
The robot exhausts its resources coming back to
the base station. In this case the robot requests a
specific recruit requests by other active robots.
Incremental recruit: every pre-fixed amount of
time a robot is resumed and it can come back to
scan the area in order to reduce the overall tack
of map building;
In the recruiting phase, a robot can be recruited if it
has enough resources to be recruited. In our case it is
considered the battery level to know in advance if, on
the basis of the position where the robot should go, it
has enough energy to go there. It is preferred the
recruit if a robot that is inactive on the base station in
order to involve it in the space exploration task.
Secondly, the robot will be involved also considering
the distance. This means that the robot nearest in
terms of base station will be selected. When a robot is
terminating its resources, it will go to recharge on the
base stations that is closer to the robot.
6 SECURITY EVALUATION IN
ROBOT COORDINATION
In this section different security threats scenarios will
be considered. In the first scenario a personification
attack is considered and then an authentication
procedure is proposed as countermeasure.
Then, a second scenario where a specific integrity
attack has been considered with the correspondent
mitigation countermeasure; the last scenario
considered an attack to the confidentiality.
Performance metrics considered for the comparison
between secure and not secure recruiting strategies
are the following: number of exchanged packets,
dropped packets and energy consumption.
Another parameter accounted in the performance
evaluation has been the cryptography algorithm
applied. In our case we considered elliptic curve
cryptography applying three different elliptic curves:
secp192r1, secp256k1, secp384r1 (Shaikh et al.,
2017), (De Rango et al.,2020).
6.1 Authentication Attack
In the first scenario, 2, 3 and 4 robots have been
considered in the simulation and not security features
have been considered. In the network a malicious
robot has been accounted and it informs all robots that
it already explored the MAP in order to disincentive
other robots to explore the unknown area. This attack
will determine that each robot will present an
incomplete MAP and the overall task will fail. Under
this attack robots think that the task is complete and
they terminate to explore the area. In Figure 3 and
Figure 4 it is possible to see the number of exchanged
packets under attack and under a legacy behavior. It
is possible to see as the exchanged packets are less
among robots under attack because they assume that
the overall task has been performed. However, this
reduction in the protocol and control overhead leads
to an incomplete MAP formation such as it is possible
to see in Figure 5.
Figure 3: Task execution time for increasing number of
robots in legacy conditions or under attack.
Figure 4: Number of transmitted and lost packets for
increasing robot number and under attack 1.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
374
In the following it is shown the number of sent
packets. It is shown in Figure 5 the map building
under attack condition or in absence of malicious
behavior. It is possible to see as on the left side, a
correct map building is observed where red, green ad
grey colors represent the scanned map by legacy
robots. On the contrary, on the right side it is possible
to see the map building considering the same
simulation time when an attack is performed. In the
right figure, the area with oblique lines represents the
unexplored areas. This testifies as an attack in this
situation can compromise the mission and the task.
Figure 5: Map building in a scenario with and without
attack.
6.2 Mitigation at Scenario 1 Attack
In this case, a considered countermeasure is the
application of authentication procedure. In particular,
the robot starts an authentication procedure before
accepting the recruiting request. In this case the
following steps will be performed:
The RSA has been applied to negotiate the
symmetric keys considered to encrypt the recruit
requests and messages where info about map is
included.
The message integrity is guaranteed signing the
message through ECC cryptography.
It the symmetric keys are successfully
exchanged between two robots, this assures that
the key and robots are authenticated.
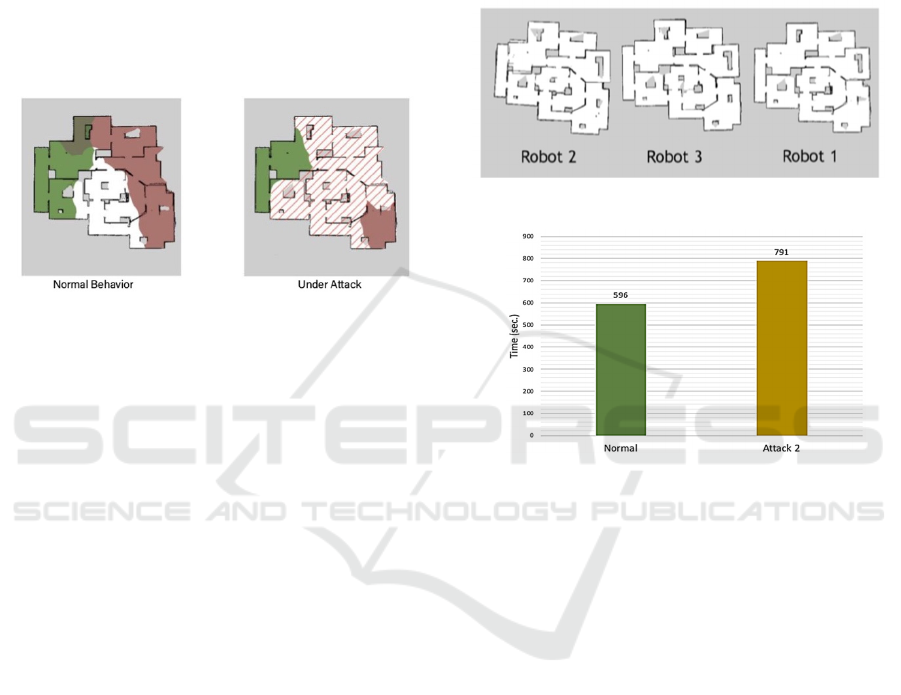
6.3 Integrity Attack
In the second scenario it is attacked the
communication module because a man in the middle
attack (MiM) is considered. In this case, the MiM
robot will try to modify the packet info erasing the
info included in the packets. This will determine the
sensible reduction of the robot cooperation
determining an independent behavior of each robot
that will not know the already discovered area by
other robots. This attack will produce a useless packet
exchange among robots that want to share their info
without obtaining the main task objective and an
increase in the task completion time will be observed.
In Figure 6 it is shown the map to be discovered by
each robot and in Figure 7 it is shown the task
execution time under attack or under a legacy robots’
behavior. The same type of attack can be applied on
other component or procedure such as the recruiting
phase and requests.
Figure 6: Map representation within each robot.
Figure 7: Task execution time for a scenario without attack
and another one (Attack 2) with security attack.
6.4 Mitigation at the Scenario 2 Attack
The countermeasure adopted in the second scenario is
the adoption of hash function in order to guarantee the
integrity. In particular, the SHA256 has been applied
to manage the message integrity.
6.5 Eavesdropping Attack
Such as explained in section 1, ROS does not include
in its features any security features for messages
created to offer integrity and confidentiality. In
particular, all topics in the publish/subscribe
architecture are public and all robots can see all
messages that fall in the communication range. This
kind of issue is well-known, in literature, as
“Eavesdropping Attack” and it is usually used as a
starting point for more dangerous attacks.
6.6 Mitigation at the Scenario 3 Attack
In order to avoid possible attack to the confidentiality
all robot communications have been encrypted using
Integrating ROS and Gazebo Tools with a Network Security Module to Support Secure Autonomous Robot Coordination
375

a block encryption such as AES-128 (Kousalya and
Kumar, 2019) using ephemeral symmetric keys such
as explained in section 4. Moreover, in order to
mitigate the reflection attack, we managed a couple
of keys to manage encryption and decryption for
ingoing and outgoing traffic. It is possible to see in as
the ROS system, without our extension allows robots
to see all info exchanged in the packets. It is possible
to see as in the considered system the cryptographic
approach is effective hiding all info and providing
confidentiality property and complicating the attacker
work. In the following it is shown as the ECC curve
selected in the proposed approach to digitally sign the
packet can affect the execution time.
Figure 8: Task execution time under different ECC curves.
7 CONCLUSIONS
The following paper proposed to consider the security
aspects in the modeling and performance evaluation
of multi-robots systems. The coordination strategy
can be degraded or compromised by some possible
threats and it is important to include security features
in the communication protocols and on-board to
robots in order to protect them by possible cyber-
attacks. Current simulation tools such as ROS and
GAZEBO do not include in the basic features
modules able to consider security aspects and how
security aspects affect some constrained resources
such as battery and communication channel. Some
modules have been integrated in ROS and GAZEBO
to extend the modeling aspects to security. Some
mechanisms to support authentication, integrity and
encryption have been implemented. Moreover, some
security attacks have been applied to show how
mission or task can be compromised. Security
features have been introduced to mitigate these
attacks and performance evaluation has been
evaluated in a legacy or under attack scenario.
REFERENCES
S. Park and G. Lee, "Mapping and localization of
cooperative robots by ROS and SLAM in unknown
working area," 2017 56th Annual Conf. of the Society
of Instrument and Control Engineers of Japan (SICE),
Kanazawa, 2017, pp. 858-861.
S. Rivera, S. Lagraa, C. Nita-Rotaru, S. Becker and R. State,
"ROS-Defender: SDN-Based Security Policy
Enforcement for Robotic Applications," 2019 IEEE
Security and Privacy Workshops (SPW), San
Francisco, CA, USA, 2019, pp. 114-119.
M. Mukhandi, et al., "A novel solution for securing robot
communications based on the MQTT protocol and
ROS," 2019 IEEE/SICE International Symposium on
System Integration (SII), Paris, France, 2019, pp. 608-
613.
F De Rango, N Palmieri, XS Yang, S Marano, “Swarm
robotics in wireless distributed protocol design for
coordinating robots involved in cooperative tasks,” in
Soft Computing, Vol. 22 (13), 2018, pp.4251-4266.
M. Tropea, N. Palmieri, and F. De Rango, F. “Modeling the
Coordination of a Multiple Robots Using Nature
Inspired Approaches”. In Italian Workshop on
Artificial Life and Evolutionary Computation (pp. 124-
133). 2019, Springer, Cham.
N Palmieri, XS Yang, F De Rango, S Marano, “Comparison
of bio-inspired algorithms applied to the coordination
of mobile robots considering the energy consumption,”
in Neural Computing and Applications, Vol. 31 (1),
2019, pp.263-286.
N Palmieri, XS Yang, F De Rango, AF Santamaria, “Self-
adaptive decision-making mechanisms to balance the
execution of multiple tasks for a multi-robots team,” in
Neurocomputing, Vol. 306, 2018, pp.17-36.
S. Gatesichapakorn, J. Takamatsu and M. Ruchanurucks,
"ROS based Autonomous Mobile Robot Navigation
using 2D LiDAR and RGB-D Camera," 2019 First
International Symposium on Instrumentation, Control,
Artificial Intelligence, and Robotics (ICA-SYMP),
Bangkok, Thailand, 2019, pp. 151-154.
Raje, Sumit. (2020). Evaluation of ROS and Gazebo
Simulation Environment using TurtleBot3 robot.
Y. Abdelrasoul, A. B. S. H. Saman and P. Sebastian, "A
quantitative study of tuning ROS gmapping parameters
and their effect on performing indoor 2D SLAM," 2016
2nd IEEE Int. Symposium on Robotics and
Manufacturing Automation, Malaysia, 2016, pp. 1-6.
A. L. Ibáñez, R. Qiu and D. Li, "An implementation of
SLAM using ROS and Arduino," 2017 IEEE Intern.
Conference on Manipulation, Manufacturing and
Measurement on the Nanoscale (3M-NANO),
Shanghai, China, 2017, pp. 1-6.
ROS, ”About Turtlebot 3”, ROS.org. [Online]. Available:
https://emanual.robotis.com/docs/en/platform/turtlebot
3/overview/
J. R. Shaikh, M. Nenova, G. Iliev and Z. Valkova-Jarvis,
"Analysis of standard elliptic curves for the
implementation of elliptic curve cryptography in
resource-constrained E-commerce applications," 2017
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
376

IEEE International Conference on Microwaves,
Antennas, Communications and Electronic Systems
(COMCAS), Tel-Aviv, Israel, 2017, pp. 1-4.
F. De Rango, G. Potrino, M. Tropea, and P. Fazio, P.
“Energy-aware dynamic Internet of Things security
system based on Elliptic Curve Cryptography and
Message Queue Telemetry Transport protocol for
mitigating Replay attacks”. Pervasive and Mobile
Computing, 61, 2020, 101105.
R. Kousalya and G. A. Sathish Kumar, "A Survey of Light-
Weight Cryptographic Algorithm for Information
Security and Hardware Efficiency In Resource
Constrained Devices," in ViTECoN, Vellore, India,
2019, pp. 1-5.
Integrating ROS and Gazebo Tools with a Network Security Module to Support Secure Autonomous Robot Coordination
377
