
Upper Limb Anthropometric Parameter Estimation through
Convolutional Neural Network Systems and Image Processing
Andres Guatibonza
a
, Leonardo Solaque
b
, Alexandra Velasco
c
and Lina Pe
˜
nuela
d
Militar Nueva Granada University, Bogot
´
a, Colombia
Keywords:
Estimation, Convolutional Neural Networks, Anthropometry, Upper Limb, Image Processing.
Abstract:
Anthropometry is a versatile tool for evaluating the human body proportions. This tool allows the orientation
of public health policies and clinical decisions. But in order to optimize the obtaining of anthropometric mea-
surements, different methods have been developed to determine anthropometry automatically using artificial
intelligence. In this work, we apply a convolutional neural network to estimate the upper limb’s anthropomet-
ric parameters. With this aim, we use the OpenPose estimator system and image processing for segmentation
with U-NET from a complete uncalibrated body image. The parameter estimation system is performed with
total body images from 4 different volunteers. The system accuracy is evaluated through a global average
percentage of 71% from the comparison between measured values and estimated values. A fine-tuning of
algorithm hyper-parameters will be used in future works to improve the estimation.
1 INTRODUCTION
Anthropometry is a technique that allows to analyze
the physical body features of each person and how
affects their performance. It is usually applied in
different areas such as nutrition, sports, clothing, er-
gonomics, and architecture. It is also commonly used
to study diseases and to assess the nutritional status
of the person (Tov
´
ee, 2012; Eaton-Evans, 2013). The
anthropometric study makes it possible to calculate a
series of measurements such sectional lengths, thick-
nesses, proportions, weights and sizes in order to ob-
tain information about the individual’s physical and
nutritional status, which allows treating, as the case
may be, certain deficiencies or physical aptitudes (Ca-
ballero, 2013; Gallagher et al., 2013).
Anthropometry undoubtedly varies between each
person (Tov
´
ee, 2012), and the measurement effective-
ness of traditional instruments is unquestionable, but
when measuring, it usually takes some time, this al-
lows the optimization of certain processes like this to
be improved and automated. This fact has led to ex-
ploring forms of parametric estimation of anthropom-
etry and how to develop automatic estimation sys-
a
https://orcid.org/0000-0001-6102-563X
b
https://orcid.org/0000-0002-2773-1028
c
https://orcid.org/0000-0001-7786-880X
d
https://orcid.org/0000-0002-1925-9296
tems, such as computational models based on neural
networks.
In this context, one of the most popular appli-
cations for human parametric estimation is the pose
estimation, and therefore, the estimation of anthro-
pometry (Agha and Alnahhal, 2012; Ayma et al.,
2016; Chang and Wang, 2015; Dama
ˇ
sevi
ˇ
cius et al.,
2018). Works related to development of techniques
for pose estimation have been widely tackled in liter-
ature. For example, in (Batchuluun et al., 2018) con-
volutional neural networks are used for human identi-
fication based on body movements. Moreover, (Brau
and Jiang, 2016) proposes a deep convolutional neural
network for estimating 3D human pose from monocu-
lar images with 2D annotations. In (Cao et al., 2017),
a efficient detection of pose in 2D of several peo-
ple in an image is carried out using non-parametric
representation that allows to associate parts of the
body with individuals in the image. A human body
posture recognition algorithm based on neural net-
works is developed in (Hu et al., 2016), using the
concept of wireless body area networks (WBAN). In
(Li et al., 2014), a simultaneous heterogeneous sys-
tem of a human pose regressor and detectors of artic-
ulation points and sliding window body parts is pro-
posed in a deep network architecture for the estima-
tion of human pose from monocular images. In (Tang
et al., 2019), a new method is proposed for estimat-
Guatibonza, A., Solaque, L., Velasco, A. and Peñuela, L.
Upper Limb Anthropometric Parameter Estimation through Convolutional Neural Network Systems and Image Processing.
DOI: 10.5220/0010566505830591
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 583-591
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
583
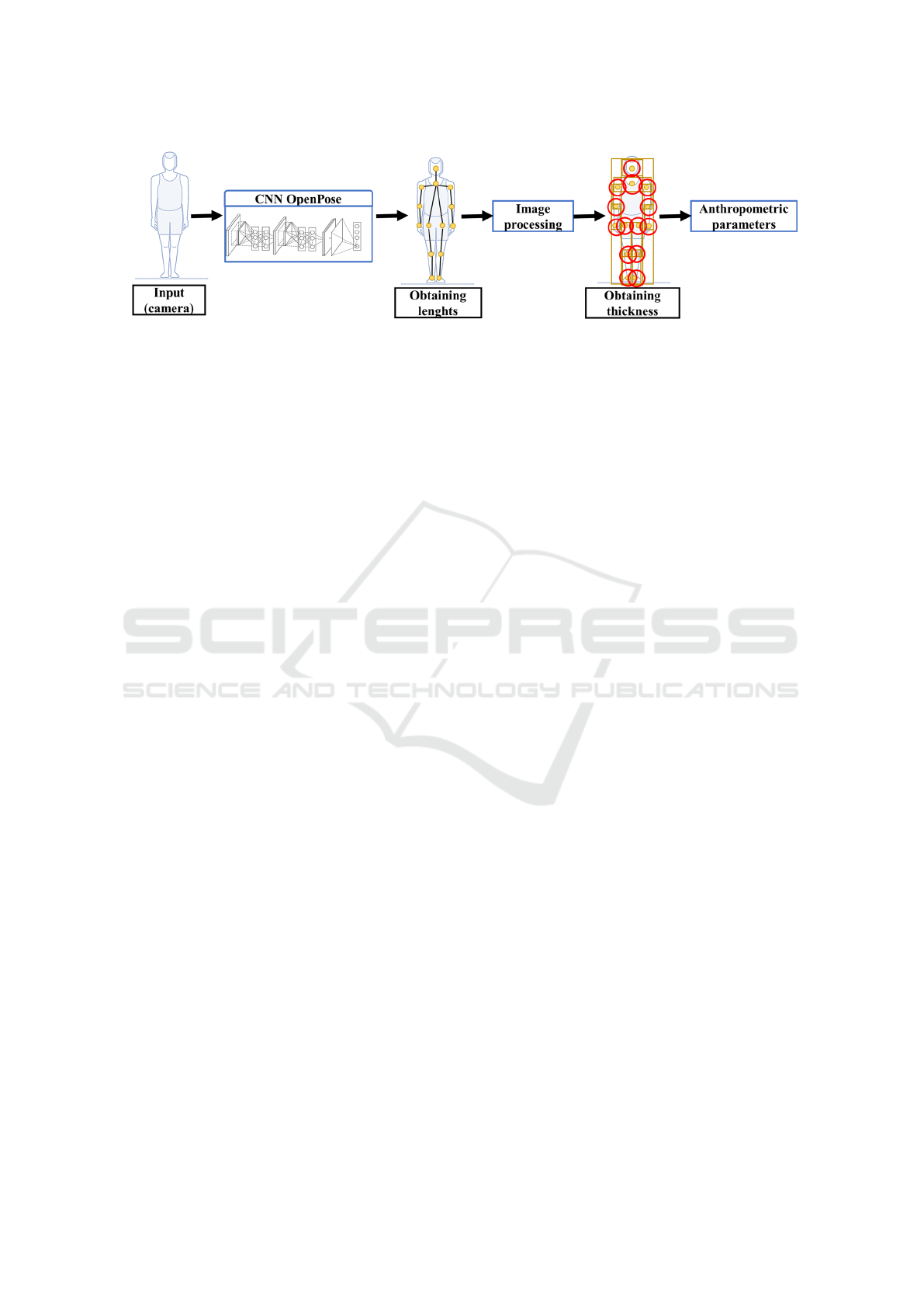
Figure 1: Simplified diagram of anthropometric parameter estimation.
ing the human pose in 3D from color images and in-
depth images through an RGBD camera using convo-
lutional neural networks. In (Zhu et al., 2017), an es-
timation of the human pose is performed in fixed im-
ages, using a multiple resolution convolutional neu-
ral network (MR-CNN) to train and learn the charac-
teristics of multiple scales of each part of the body.
In (Zhang et al., 2019), the study of pose estima-
tion is mainly focused on the dynamics of the human
limbs for the recognition of actions based on skeletons
by means of a graph edge convolutional neural net-
work (CNN). For some specific applications, (Farulla
et al., 2016) presents the estimation based on artifi-
cial vision for robot-guided hand tele-rehabilitation,
or the work proposed by (Chen et al., 2018), where
a surveillance human posture dataset (SHPD) based
on more specialized human pose reference points is
presented for surveillance tasks, and (Liu et al., 2018)
where a comprehensive pose network (IntePoseNet)
is proposed to assess the level of customer interest in
a business’ merchandise.
These studies lead to the integration of new meth-
ods or techniques associated with the estimation of
anthropometric indices. These indices are usually ob-
tained through body metrics or using anthropometric
measurement ratios to estimate human proportions or
complementary data that can be obtained from the es-
timation of human pose or other methods with neu-
ral networks as in (Agha and Alnahhal, 2012), where
a neural network and multiple linear regressions are
developed to predict the dimensions of school chil-
dren for an ergonomic design of school furniture.
Moreover, in (Ayma et al., 2016) an approach to
carry out nutritional evaluations to children under five
years of age, through a system focused on the estima-
tion of anthropometric indices, using image process-
ing techniques and neural network is presented. In
(Chang and Wang, 2015) a learning-based algorithm
is proposed for estimating body shape using multi-
view clothing images.
In the same way, other types of parameters can
be obtained; for instance, in the work proposed by
(Dama
ˇ
sevi
ˇ
cius et al., 2018) an automatic system is
developed by using 3D anthropometric measurements
of human subjects for gender detection with k-nearest
neighbors (KNN), Support Vector Machines (SVM)
and neural networks classifying parameters. Authors
in (Rativa et al., 2018) present a complete study of the
application of learning models to estimate height and
weight from anthropometric measurements using sup-
port vector regression, Gaussian process and artificial
neural networks, as well as in (Sarafianos et al., 2016)
a regression-based method is proposed to use privi-
leged information (LUPI) to estimate height using hu-
man metrology. Anthropometric-based true height es-
timation using multilayer perceptron ANN architec-
ture in surveillance areas is tackled in (Sriharsha and
Alphonse, 2019). All these proposed techniques gen-
erate new alternatives to improve or propose estima-
tion strategies with several applications.
In this paper, a study of the application of con-
volutional neural networks and image processing to
estimate anthropometric proportions is presented. We
have developed a method based on neural networks
and pre-calculated systems, such as OpenPose and U-
NET, that allows optimizing anthropometric measure-
ment processes in time and without using measure-
ment instruments. The process is carried out from
image analysis. This study aims to estimate anthropo-
metric parameters from a single uncalibrated image,
using convolutional neural networks for pose estima-
tion and image processing. In this way, we obtain the
lengths and widths of the upper limb. We apply neu-
ral networks and the Euclidean minimization Random
Search technique (EMRS) to estimate the real anthro-
pometric parameters of a person’s upper limb. This
work is limited to the anthropometric estimation of
the upper limb, but it can be applied to the entire hu-
man body. This kind of neural networks models cre-
ates new opportunities for applications related to hu-
man anthropometry in safety and health.
This document is organized as follows: section II
presents the methodology followed to obtain the esti-
mation of human pose, anthropometric lengths, thick-
nesses and perimeters, and a description of the com-
plete system that includes the networks used, and the
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
584
techniques of measurement for the estimation. In sec-
tion III we present the experimental results obtained
by the application of this algorithm to the images of
4 different healthy volunteers. We compare the re-
sults with the actual anthropometric measurements of
the participant. Finally we present, in Section IV, the
conclusions of the work carried out and some future
actions.
2 METHODOLOGY
A neural network system is developed for the acqui-
sition of people’s anthropometric data. The system
estimates anthropometric parameters from an uncali-
brated image. The first step is resizing and calibrating
the image. For this, an algorithm based on convolu-
tional neural networks for pose estimation finds the
points of the joints. Then, the limb lengths are cal-
culated through the Euclidean distance between the
points that make up the body structure. Finally, the
original image is processed to find the contours and
segmentation of the person to isolate it from the envi-
ronment. Additionally, other measurements such as
perimeters and thicknesses are calculated using the
EMRS technique. In summary, the system is com-
posed of 3 main phases:
1. Estimation of the human pose using convolutional
networks from an input image.
2. Estimation of the anthropometric lengths from the
keypoints obtained in the convolutional network.
3. Estimation of thickness of the upper limb joints
using image processing to obtain segmental con-
tours of the person.
2.1 Application of Convolutional
Networks for Human Pose
Estimation
The pose estimation is formulated as a CNN-based
regression problem at the body joints. It consists on
detecting the coordinates of a 2D pose (x, y) for each
joint from a RGB image. This pose estimation has
been heavily reshaped by CNN since the introduc-
tion of ”DeepPose” by (Toshev and Szegedy, 2014).
As part of the development of this work, the method
proposed by OpenPose for the estimation of human
posture is used with a non-parametric representation
called Part Affinity Fields (PAF), to ”connect” each
of the body joints found in an image. In essence, the
model consists of pieces based on heat maps for an
approximate location, and a module to sample and
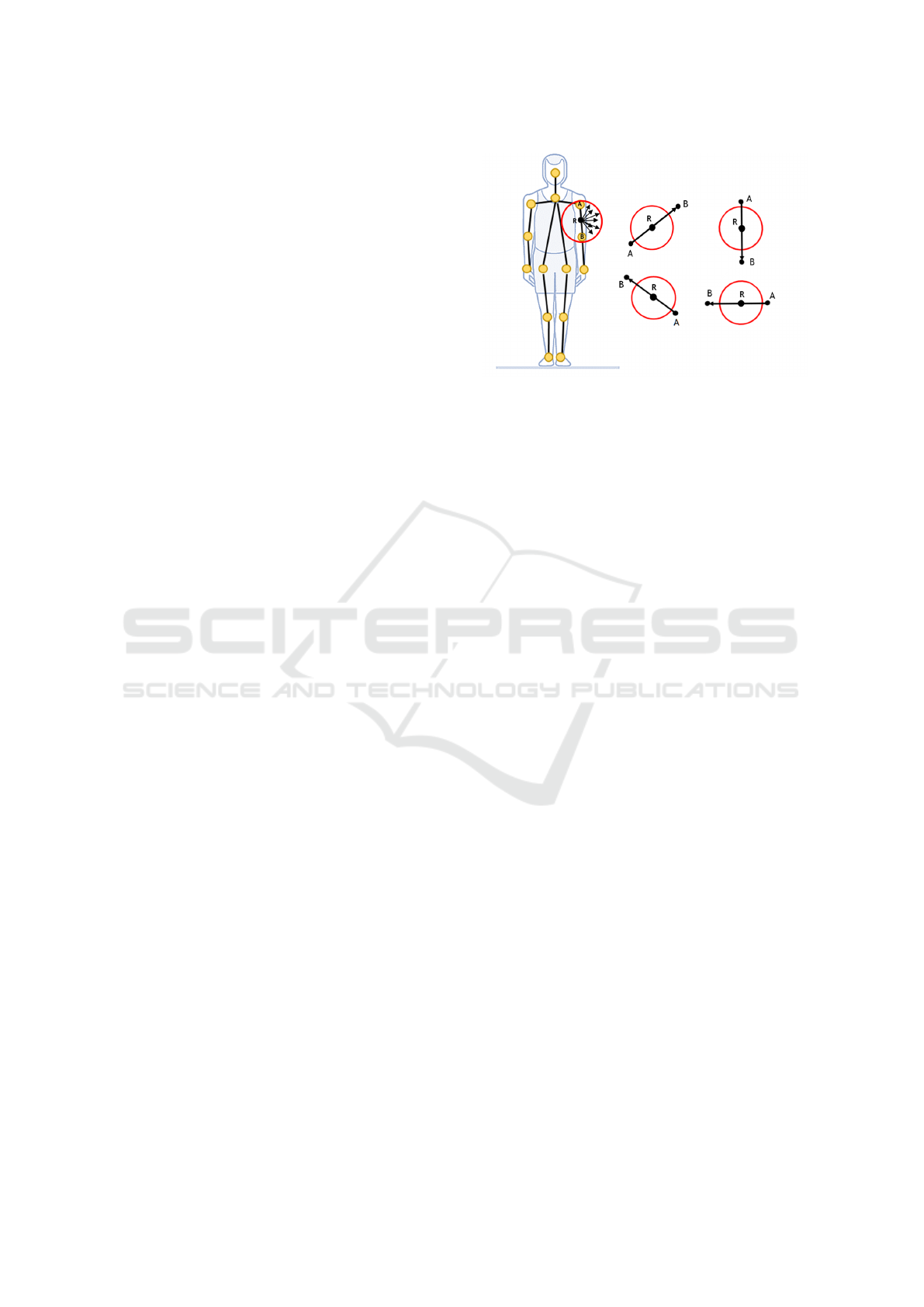
Figure 2: Concept of random search of distance minimiza-
tion.
clip the convolution characteristics at a specified point
(x,y) for each joint as shown in Fig. 1, as well as
an additional convolutional model for fine adjustment.
Specifically, this system is a pose machine (Wei et al.,
2016a) that takes as input a color image, and produces
the 2D locations of anatomical keypoints. This sys-
tem consists of a feed-forward network that predicts a
set of 2D confidence maps of body part locations and
a set of 2D vector fields of part affinity fields (PAFs),
which encode the degree of association between parts.
The architecture iteratively predicts the affinity fields
that encode the association between parts, and the de-
tection confidence maps. The iterative prediction ar-
chitecture refines the predictions in successive stages
with intermediate supervision at each stage. If the
reader wants more information about the operation of
Openpose, please refer to (Cao et al., 2019; Wei et al.,
2016a; Simon et al., 2017; Cao et al., 2017; Wei et al.,
2016b)
In our case, the estimation of the human pos-
ture was limited to the detection of a single person
in the image due to the focus of this work. We
use the COCO model from Microsoft (Lin et al.,
2014), which includes an extensive default dataset of
118.000 images for training and 5.000 images for val-
idation that can be used for object detection, segmen-
tation, and captioning dataset, among other features.
For the COCO model, 14 points are produced, as-
sociated as follows: p
0
= forehead, p
1
= Chest, p
2
=
Right shoulder, p
3
= Right elbow, p
4
= right wrist,
p
5
= Left shoulder, p
6
= Left elbow, p
7
= Left wrist,
p
8
= Right thigh, p
9
= Right knee, p
10
= Right an-
kle, p
11
= Left thigh , p
12
= Left knee, p
13
= Left
ankle. Once the image is passed to the model, the net-
work makes a prediction of the coordinates where the
previously defined points are located. The model pro-
duces confidence maps and affinity maps of the pieces
that would be concatenated. Then it verifies whether
Upper Limb Anthropometric Parameter Estimation through Convolutional Neural Network Systems and Image Processing
585

each keypoint belongs to the image. The keypoint lo-
cation is obtained by finding its maximum value on
the confidence map, and also, includes an algorithm
to find false detections, for more information please
refer to (Cao et al., 2019).
2.2 Estimation of Anthropometric
Lengths and Thicknesses of the
Upper Limb from Estimation of
Human Pose and Image Processing
(Regionprops)
Once the coordinates of the body’s joints are obtained
with the pose estimation, the extraction of the charac-
teristics related to the upper limb is carried out. We
consider the distance from shoulder to elbow SEd,
elbow to wrist EW d, and the biacromial width Bw.
These characteristics can be obtained by calculating
the Euclidean distance between two points in pixels
expressed by
d
i
=
q
(p
x(i+1)
− p
x(i)
)
2
+ (p
y(i+1)
− p
y(i)
)
2
, (1)
Where d
i
is the Euclidean distance between two
points for i = 1, .., 8 upper limb joints; (P
x
i, P, yi) are
the cartesian position coordinates of the current key-
point, and (P
x
(i + 1), P, y(i + 1)) are the cartesian po-
sition coordinates of the next adjacent keypoints.
Regarding the characteristics associated with the
thicknesses and the perimeters, such as the wrist
width W w, the arm perimeter Ap, the forearm perime-
ter F p and the elbow width Ew, we obtain them
through image processing. A common way to per-
form segmentation is through a Fully Convolutional
Network (FCN), better known as U-NET. In the same
way, this network has pre-trained models with an ex-
tensive image dataset of people with pointers or iden-
tifiers to perform the segmentation. The result ob-
tained at the output of the network is a mask of the
person excluding the background. This approach to
image processing will allow to segment it into re-
gions. Similarly, if the reader wants more information
about the operation of U-NET, please refer to (Ron-
neberger et al., 2015).
To obtain the widths and perimeters, we start from
the original image M
original
which is entered into pre-
trained U-NET model where the matrix of the identi-
fied person mask is obtained at the output M
mask
. Ad-
ditionally, noise filtering is performed to soften the
edges of the mask and eliminate unwanted disper-
sion. Filtering is done with a morphological transfor-
mation since the image can be described as a binary.
The morphological operators used for the decision are
erosion and threshold. A kernel array H(u, v) slides
through the image (as in 2D convolution) where 1 is
assigned if all pixels below the kernel are greater than
the threshold; otherwise it erodes (reduces to zero).
The matrix resulting from filtering M
f ilter
can be ob-
tained by
M
f ilter(i, j)
= M
mask(i, j)
∗ H(u, v)
n
∑
i=0
n
∑
j=0
M
f ilter(i, j)
(
1 if M
f ilter(i, j)
> threshold
0 if M
f ilter(i, j)
≤ threshold
,
(2)
where M
f ilter(i, j)
is the resulting matrix after the fil-
tering; H(u, v) is the kernel matrix that performs the
convolution across the image and evaluates with re-
spect to the threshold. The selection of the threshold
is free, typically, a value 0.5 is used.
Then, the background is eliminated by subtracting
the matrix belonging to the original image M
original
from the matrix resulting from the filtered mask
M
f ilter
. After that, a blur filter is applied to the binary
image to eliminate the residual noise and preserve the
smoothness of the edges. To do this, we apply the im-
age convolution. Then, we take the average of all the
pixels below the kernel area, to replace the central ele-
ment with this average. We use cv2.blur () function of
OpenCV with this purpose. For more information of
this library the reader is encouraged to review (Mord-
vintsev and K, ).
From the binarized image, the contours of the per-
son can be easily obtained by evaluating the matrix
of pixels when a change from 0 to 1 is detected, and
viceversa. Each individual contour is a matrix of co-
ordinates (x,y) of the object border points. These con-
tours are the limits of a shape with the same intensity.
We use OpenCV function cv2.findContours () with
this purpose. This function generates contours elimi-
nating redundant points and keeping those that offer a
great amount of information to save processing mem-
ory. The stored points that belong to the contour are
included in the original image.
Subsequently, the Canny edge detection algorithm
(Canny, 1986) is applied. This algorithm first removes
noise in the image with a 5x5 Gaussian filter, since
edge detection is susceptible to noise in the image.
Then, the intensity of the gradient is found for hor-
izontal, vertical and diagonal detection at the edges
of the filtered image. Sobel’s edge detection operator
(Patnaik and Yang, 2012) for example, returns a value
for the first derivative in the horizontal direction (Gx)
and the vertical direction (Gy). Then, the edge gradi-
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
586

ent and direction are determined by
EdgeGradient(G) =
q
G
2
x
+ G
2
y
Angle(θ) = tan
−1
G
y
G
x
(3)
The pixels of the edges are kept or eliminated by
the hysteresis threshold in the magnitude of the gradi-
ent. In our case, we used a Gaussian width σ = 1. The
function skimage.feature.canny () of Scikit-image li-
brary performs this detection (Canny, 2020).
After calculating the edges, an exact Euclidean
distance transform is used to evaluate the distances
between the points obtained from the edges and their
correlation using a heat map. For this, we used
the function distance transform edt() of SciPy (Scipy,
2020).
Using the resulting distance map, we calculate
the coordinates of the local maxima found in the im-
age. If the peaks are flat, that is, several adjacent
pixels have identical intensities, the coordinates of
all those pixels are returned as local maxima. The
calculation of local maxima is be defined by a re-
gion of 2 ∗ mindistance + 1 where the selection of
mindistance will define the amount of points that
the algorithm manages to find. We use the func-
tion feature.peak local max() of scikit-image library
(OpenCV, 2020b).
Then, with the definition of the local maxima,
edge segmentation is used where the limits between
the highlighted labeled regions are applied to the
original image. We use the function segmenta-
tion.mark boundaries() of scikit-image library for this
purpose (OpenCV, 2020a). Subsequently, the mark-
ers obtained by the segmentation will serve to fill in
the areas enclosed by the segmentation, evaluating the
color values of the pixels in each area including the
background, and then calculating the average values
to normalize the segmented area. The background of
the image is normalized by assigning a user-defined
color that represents a differentiation with the person
to avoid confusing the colors between the person and
the background.
Then, the thickness and the perimeters are esti-
mated on the resulting image using a random search
technique to minimize the euclidean distances. This
technique consists in selecting the joint and mid-
point between the joints and evaluating the euclidean
distance between a series of random points located
outside the person’s space and the chosen reference
point. The workspace radius that restricts this evalua-
tion is defined as shown in Fig. 2.
The orientation of the points near A and B to the
reference point R determine the arms orientation in
the photo (raised or relaxed) and whether it is the right
arm or the left arm. Then we define the radius of the
workspace on which the search is carried out by using
r = 0.5 ∗
q
(A
2
x
− B
2
x
) + (A
2
y
− B
2
y
)
Subsequently, a series of random points is gener-
ated on the radial space, and each distance towards the
reference point is evaluated iteratively until obtaining
the smallest possible distance that occurs when the
edge of the person is reached. In this way, we ob-
tain the estimates of the thicknesses and the perime-
ters of the upper limb. Then it is necessary to make a
conversion of the estimates calculated from pixels to
centimeters as
ExtractedLength
cm
= α ∗ ExtractedLength
px
(4)
where α is a proportionality constant associated with
a known horizontal distance between the camera and
the person.
3 EXPERIMENTAL RESULTS
For the validation of the estimation system, a set of
images with known anthropometric values are used.
Four volunteers (2 men and 2 women) participated
in the experiment. Their anthropomorphic measure-
ments were previously obtained with measurement in-
struments. We used rulers to measure distances and
calipers to measure thicknesses. Due to current san-
itary restrictions, we worked with a limited number
of volunteers, however, in future work we will extend
the participation to give a greater validity to the esti-
mation method.
The images are inserted into the subsystem to
obtain the pose estimation, calculating the coordi-
nates (x,y) associated with the joints and other de-
fined points. The images were taken in uncontrolled
environments to validate the effectiveness of the al-
gorithm. For this reason, in this paper we present the
cases of four volunteers in a non-controlled environ-
ment, with raised arms, which is a particular exam-
ple where the person is doing any pose gesture and
the background is not one color. In Fig.3 we show
the resulting estimation of the defined points and the
association of these points to each joint. The input
image has a resolution of 500x500 pixels. The algo-
rithm returns the parts that belong to the background
and those that belong to the person’s body to place the
points of the joints. Some points of the lower limbs
are not fully centered in the human body joints due to
the similarity of colors with the background. Then,
the lengths in pixels of SEd, EW d and Bw are calcu-
lated using (1). The proportionality of distances cal-
culated in the image in Fig. 3 keeps a certain consis-
tency if it is compared with the proportionality of the
Upper Limb Anthropometric Parameter Estimation through Convolutional Neural Network Systems and Image Processing
587

Figure 3: Sample image pose estimation.
Figure 4: Segmentation process and image processing.
Table 1: Measured vs estimated anthropometric values.
Volunteer 1 Volunteer 2 Volunteer 3 Volunteer 4
Parameter
Measured
(cm)
Estimated
(cm)
Measured
(cm)
Estimated
(cm)
Measured
(cm)
Estimated
(cm)
Measured
(cm)
Estimated
(cm)
SEd 35 36,6 33 38,4 30 35 24 31,3
EW d 26 31,5 27 38 26 35,6 24 27,1
Bw 42 41,4 40 53,4 38 47,8 38 42,8
W w 5,7 4,32 5,6 5,1 5,4 8,6 5,7 3,7
Ap 30 33,06 35 73 33 34,9 35 21,6
F p 25 21,18 25 10,5 20 10,7 28 32,1
Ew 8,9 5,64 8,7 10 8,9 7 8,9 3,7
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
588

Figure 5: Shortest distance search in processed image.
anthropometric data in (Avila-Chaurand et al., 2007).
Proportionality must maintain a fixed value for all the
measured parameters. Table. 2 shows that SEd and
EW d have a fixed proportionality value of 0.3± 0.025
but Bw differs in 0.15 units approximately, this is due
to the fact that the estimation of the points that belong
to the shoulders’ biacromial width are not accurately
located.
Table 2: Proportionality estimation values.
Parameter Estimated
(px)
Measured
(cm)
Proportion
SEd 56 35 0.375
EW d 40 26 0.35
Bw 35 42 0.2
Then, we calculate the thicknesses and the
perimeters using the original image for the segmen-
tation system with U-NET. The result of the esti-
mation is shown in Fig.4.b where the identified ma-
trix of the person mask M
f ilter
, with noise filtering
and edge smoothing using a threshold of 0.5 is ob-
tained. By subtracting the matrix M
original
from the
M
f ilter
we eliminate the background, as shown in
Fig.4.c. In addition to matrix M
f ilter
, a blur filter is
applied to eliminate residual noises that may have re-
mained in the first filtering. The idea is to approx-
imate the contour of the person as closely as possi-
ble so the estimation can be improved. The result
of the second filtering is shown in Fig.4.d. Subse-
quently, the outlines of the binary and filtered im-
age are found using regionprops and combined with
the original image as shown in Fig.4.e. Then, the
characteristic edges and strokes found throughout the
body are calculated with Canny’s edge detection al-
gorithm (Canny, 1986) using a Gaussian width σ = 1,
as shown in Fig.4.f. The correlation of the edges and
distances between the points obtained from the edge
are shown in Fig.4.g, where later in Fig.4.h-i, the lo-
cal max peak distances and IDs are calculated using
a region with mindistance = 5 . Then, the segmen-
tation of the points obtained is carried out and the
segmented areas are repainted with the average RGB
value as shown in Fig.4.j-k. The background color
has on average a bluish color so when repainting the
areas, the background is also repainted. Finally, the
background is normalized by assigning a RGB value
of (255,255,255) corresponding to white color, thus
resulting in the image of Fig.4.l as the output image
for estimating thickness and perimeters.
Now, we calculate the thicknesses and the perime-
ters W w, Ap, F p and Ew. For this, we identify the ori-
entation of the points A and B with the slope of those
points and we evaluate the highest and lowest values
of the coordinates in (x, y) in the cartesian plane of
the image as shown in Fig.5.a. Then, we define the
searching radius (red circle), and we evaluate the mi-
nor euclidean distance performing the random search
algorithm with 100 points as shown in Fig.5.b.
Then, the obtained anthropometric proportions es-
timation results are converted from px to cm with
α = 0.6. This procedure was repeated for the other
volunteers. Table 1 shows a comparison of the esti-
mated and measured data. In average, the accuracy is
71% between the measured values and the estimated
values. SE
d
is the parameter with the highest aver-
age accuracy (83%), while A
p
is the parameter with
the lowest average accuracy (59%). Volunteer 1 has
the highest average accuracy (84%), while volunteer
2 has the lowest average accuracy (60%). The accu-
racy can be increased using an image with a more
controlled environment. On the other hand, the res-
olution of the camera, the image processing indices
and the number of points in the EMRS technique can
also improve the estimation.
4 CONCLUSIONS
In this paper, we presented a system for the estima-
tion of anthropometric parameters. This system was
implemented through the use of convolutional neural
networks and image processing. We proposed a sys-
tem based on 3 phases: estimation of the human pose,
estimation of anthropometric lengths and estimation
of thickness using image processing.
Upper Limb Anthropometric Parameter Estimation through Convolutional Neural Network Systems and Image Processing
589

Human pose estimation is made from an image of
total body. Four volunteers participated in this study.
A particular example of an uncalibrated image was
analyzed. This image was taken in a random environ-
ment where the pose estimation algorithm finds ad-
equately the joint points. Then, the anthropometric
lengths are calculated from the coordinates obtained
from the human pose by means of a euclidean cal-
culation. Then, we obtained the thicknesses and the
perimeters of the upper limb through segmentation,
image processing and a Euclidean minimization ran-
dom search (EMRS). The results obtained were com-
pared with measurements previously taken with rulers
for the distances and calipers for the thicknesses, get-
ting a global average accuracy of 71% between the
measurements in all the subjects. We define empir-
ically the hyperparameters, but other strategies can
be proposed in the future to make a more accurate
fine-tunning of these hyperparameters in order to get
better results. This method promises to optimize the
estimation of anthropometric measurements automat-
ically without using other instrumentation, only from
an image and the distance between the camera and the
person.
Currently we are performing more tests of the es-
timation system, considering a higher number of par-
ticipants. In this way we will have different anthropo-
metric proportions in order validate and generalized
the algorithm by fine-tuning the hyperparameters of
the estimation. In the future we will also general-
ize the estimation to obtain other data such as muscle
strength to use it for example, in rehabilitation appli-
cations.
ACKNOWLEDGEMENTS
This work is supported by Universidad Militar Nueva
Granada- Vicerrectoria de Investigaciones, under re-
search project IMP-ING-3127, entitled ’Dise
˜
no e im-
plementaci
´
on de un sistema rob
´
otico asistencial para
apoyo al diagn
´
ostico y rehabilitaci
´
on de tendinopat
´
ıas
del codo’.
REFERENCES
Agha, S. R. and Alnahhal, M. J. (2012). Neural network
and multiple linear regression to predict school chil-
dren dimensions for ergonomic school furniture de-
sign. Applied Ergonomics, 43(6):979–984.
Avila-Chaurand, R., Prado-Le
´
on, L., and Gonz
´
alez-Mu
˜
noz,
E. (2007). Dimensiones antropom
´
etricas de la
poblaci
´
on latinoamericana : M
´
exico, Cuba, Colom-
bia, Chile / R. Avila Chaurand, L.R. Prado Le
´
on, E.L.
Gonz
´
alez Mu
˜
noz.
Ayma, V. A., Ayma, V. H., and Torre, L. G. A. (2016). Nu-
tritional assessment of children under five based on
anthropometric measurements with image processing
techniques. In 2016 IEEE ANDESCON. IEEE.
Batchuluun, G., Naqvi, R. A., Kim, W., and Park, K. R.
(2018). Body-movement-based human identification
using convolutional neural network. Expert Systems
with Applications, 101:56–77.
Brau, E. and Jiang, H. (2016). 3d human pose estimation
via deep learning from 2d annotations. In 2016 Fourth
International Conference on 3D Vision (3DV). IEEE.
Caballero, B. (2013). Nutritional assessment: Clinical
examination. In Encyclopedia of Human Nutrition ,
pages 233–235. Elsevier.
Canny, J. (1986). A computational approach to edge de-
tection. IEEE Transactions on Pattern Analysis and
Machine Intelligence, PAMI-8(6):679–698.
Canny, J. (2020). Canny edge detector. https://scikit-
image.org/docs/dev/auto examples/edges/plot canny.
[Online; accessed october-2020].
Cao, Z., Hidalgo Martinez, G., Simon, T., Wei, S., and
Sheikh, Y. A. (2019). Openpose: Realtime multi-
person 2d pose estimation using part affinity fields.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In CVPR.
Chang, W.-Y. and Wang, Y.-C. F. (2015). Seeing through the
appearance: Body shape estimation using multi-view
clothing images. In 2015 IEEE International Confer-
ence on Multimedia and Expo (ICME). IEEE.
Chen, Q., Zhang, C., Liu, W., and Wang, D. (2018).
SHPD: Surveillance human pose dataset and perfor-
mance evaluation for coarse-grained pose estimation.
In 2018 25th IEEE International Conference on Image
Processing (ICIP). IEEE.
Dama
ˇ
sevi
ˇ
cius, R., Camalan Seda, Sengul Gokhan, Misra
Sanjay, and Maskeli
¯
unas Rytis (2018). Gender detec-
tion using 3d anthropometric measurements by kinect.
Eaton-Evans, J. (2013). Nutritional assessment: Anthro-
pometry. In Encyclopedia of Human Nutrition, pages
227–232. Elsevier.
Farulla, G. A., Pianu, D., Cempini, M., Cortese, M., Russo,
L., Indaco, M., Nerino, R., Chimienti, A., Oddo, C.,
and Vitiello, N. (2016). Vision-based pose estimation
for robot-mediated hand telerehabilitation. Sensors,
16(2):208.
Gallagher, D., Chung, S., and Akram, M. (2013). Body
composition. In Encyclopedia of Human Nutrition,
pages 191–199. Elsevier.
Hu, F., Wang, L., Wang, S., Liu, X., and He, G. (2016). A
human body posture recognition algorithm based on
BP neural network for wireless body area networks.
China Communications, 13(8):198–208.
Li, S., Liu, Z.-Q., and Chan, A. B. (2014). Heteroge-
neous multi-task learning for human pose estimation
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
590

with deep convolutional neural network. International
Journal of Computer Vision, 113(1):19–36.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. In Com-
puter Vision – ECCV 2014, pages 740–755. Springer
International Publishing.
Liu, J., Gu, Y., and Kamijo, S. (2018). Integral cus-
tomer pose estimation using body orientation and vis-
ibility mask. Multimedia Tools and Applications,
77(19):26107–26134.
Mordvintsev, A. and K, A. Smooth-
ing images. https://opencv-python-
tutroals.readthedocs.io/en/latest/py tutorials/py imgp
roc/py filtering/py filtering.html.
OpenCV (2020a). Module: segmentation. https://scikit-
image.org/docs/dev/api/skimage.segmentation.html.
[Online; accessed october-2020].
OpenCV (2020b). peak local max. https://scikit-
image.org/docs/0.7.0/api/skimage.feature.
peak.html. [Online; accessed october-2020].
Patnaik, S. and Yang, Y.-M., editors (2012). Soft Computing
Techniques in Vision Science. Springer Berlin Heidel-
berg.
Rativa, D., Fernandes, B. J. T., and Roque, A. (2018).
Height and weight estimation from anthropometric
measurements using machine learning regressions.
IEEE Journal of Translational Engineering in Health
and Medicine, 6:1–9.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Navab, N., Hornegger, J., Wells,
W. M., and Frangi, A. F., editors, Medical Image Com-
puting and Computer-Assisted Intervention – MICCAI
2015, pages 234–241, Cham. Springer International
Publishing.
Sarafianos, N., Nikou, C., and Kakadiaris, I. A. (2016).
Predicting privileged information for height estima-
tion. In 2016 23rd International Conference on Pat-
tern Recognition (ICPR). IEEE.
Scipy (2020). distance transform edt.
https://docs.scipy.org/doc/scipy/reference/genera-
ted/scipy.ndimage.distance transform edt.html.
[Online; accessed october-2020].
Simon, T., Joo, H., Matthews, I., and Sheikh, Y. (2017).
Hand keypoint detection in single images using mul-
tiview bootstrapping. In CVPR.
Sriharsha, K. V. and Alphonse, P. (2019). Anthropometric
based real height estimation using multi layer pecep-
tron ANN architecture in surveillance areas. In 2019
10th International Conference on Computing, Com-
munication and Networking Technologies (ICCCNT).
IEEE.
Tang, H., Wang, Q., and Chen, H. (2019). Research on 3d
human pose estimation using RGBD camera. In 2019
IEEE 9th International Conference on Electronics In-
formation and Emergency Communication (ICEIEC).
IEEE.
Toshev, A. and Szegedy, C. (2014). DeepPose: Human pose
estimation via deep neural networks. In 2014 IEEE
Conference on Computer Vision and Pattern Recogni-
tion. IEEE.
Tov
´
ee, M. (2012). Anthropometry. In Cash, T., editor, En-
cyclopedia of Body Image and Human Appearance,
pages 23 – 29. Academic Press, Oxford.
Wei, S., Ramakrishna, V., Kanade, T., and Sheikh, Y.
(2016a). Convolutional pose machines. CoRR,
abs/1602.00134.
Wei, S.-E., Ramakrishna, V., Kanade, T., and Sheikh, Y.
(2016b). Convolutional pose machines. In CVPR.
Zhang, X., Xu, C., Tian, X., and Tao, D. (2019). Graph edge
convolutional neural networks for skeleton-based ac-
tion recognition. IEEE Transactions on Neural Net-
works and Learning Systems, pages 1–14.
Zhu, A., Jin, J., Wang, T., and Zhu, Q. (2017). Human pose
estimation via multi-resolution convolutional neural
network. In 2017 4th IAPR Asian Conference on Pat-
tern Recognition (ACPR). IEEE.
Upper Limb Anthropometric Parameter Estimation through Convolutional Neural Network Systems and Image Processing
591
