
A Holistic Methodology for Model-based Design of Mechatronic Systems
in Digitized and Connected System Environments
Xiaobo Liu-Henke, Sven Jacobitz, S
¨
oren Scherler, Marian G
¨
ollner, Or Aviv Yarom and Jie Zhang
Institute for Mechatronics, Ostfalia University of Applied Sciences, Salzdahlumer Str. 46/48, Wolfenbuettel, Germany
Keywords:
Model-based Design, Holistic Design Methodology, Mechatronic Systems, Digitized and Connected Systems,
Cyber-physical Systems, MiL, SiL, HiL, DSiL, Driving Simulation.
Abstract:
This paper presents a holistic methodology for model-based design of mechatronic systems in digitized and
connected system environments. On the one hand, this includes system structuring for the controllability of
complex system relations. On the other hand, it comprises the extension of the design and safeguarding pro-
cess by requirement, data and evaluation management as well as the integration of novel technologies (e.g.
Driving-Simulator-in-the-Loop (DSiL) simulations) for the execution of closed-loop simulations under realis-
tic and at the same time reproducible operation conditions. Furthermore, a low-cost rapid control prototyping
development platform (LoRra) is presented, with which the presented methodology can be applied. The new
holistic methodology is verified by case studies.
1 INTRODUCTION
Society and economy are undergoing disruptive
changes due to increasing digitization and network-
ing. One example is the automotive industry, which
has to cope with rapidly increasing demands on ve-
hicle development and software due to autonomous
driving and the challenge of flexible, application-
specific vehicle use (Zhou et al., 2020). But also
the manufacturing industry is imperatively dependent
on Industry 4.0 solutions to increase productivity and
flexibility (Matt et al., 2020). This is to maintain
its competitiveness while at the same time producing
more varied products. Therefore, new technologies
such as artificial intelligence (AI) and the Internet of
Things (IoT) are being used, more and more also by
small and medium-sized enterprises (SMEs).
Complex algorithms, e.g. from the field of AI
or complex feedback controllers, as well as the con-
stantly increasing degree of networking significantly
increase the effort required for the design and test-
ing of the resulting cyber-physical systems (CPS) (Al-
shareef and Sarjoughian, 2018). A holistic approach
is necessary to develop and test such intelligent sys-
tems in an increasingly fast-moving, complex, digi-
tized and interlinked environment (Maldonado et al.,
2019). However, current design methods do not take
this into account sufficiently. In this paper, we ex-
tend the proven mechatronic design method to a holis-
tic methodology for the model-based development of
mechatronic systems in digitized and networked sys-
tem environments. Main research goals are the inte-
gration of several methodology parts into a holistic
methodology as well as a seamless tool support. For
this purpose, both, the system structuring as well as
the design and validation process, are critically ques-
tioned and adapted to the new requirements by inte-
grating new concepts.
2 STATE OF THE ART
2.1 Definition of Mechatronic Systems
According to VDI guideline 2206 (VDI, 2004),
mechatronic systems (Figure 1) consist of a basic sys-
tem, sensors, actuators and information processing. It
interacts with its environment through the flow of in-
formation, energy and materials.
The basic system is a physical system, which usu-
ally consists of mechanical, electromechanical, hy-
draulic and pneumatic components. It constitutes the
core of the mechatronic system. With the help of sen-
sors, selected state variables of the basic system are
determined by measurement or observation. An in-
formation processing system calculates the necessary
actions to achieve the desired system behavior, which
are implemented by the actuators on the basic system.
A mechatronic system is always embedded in a (sys-
Liu-Henke, X., Jacobitz, S., Scherler, S., Göllner, M., Yarom, O. and Zhang, J.
A Holistic Methodology for Model-based Design of Mechatronic Systems in Digitized and Connected System Environments.
DOI: 10.5220/0010566702150223
In Proceedings of the 16th International Conference on Software Technologies (ICSOFT 2021), pages 215-223
ISBN: 978-989-758-523-4
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
215
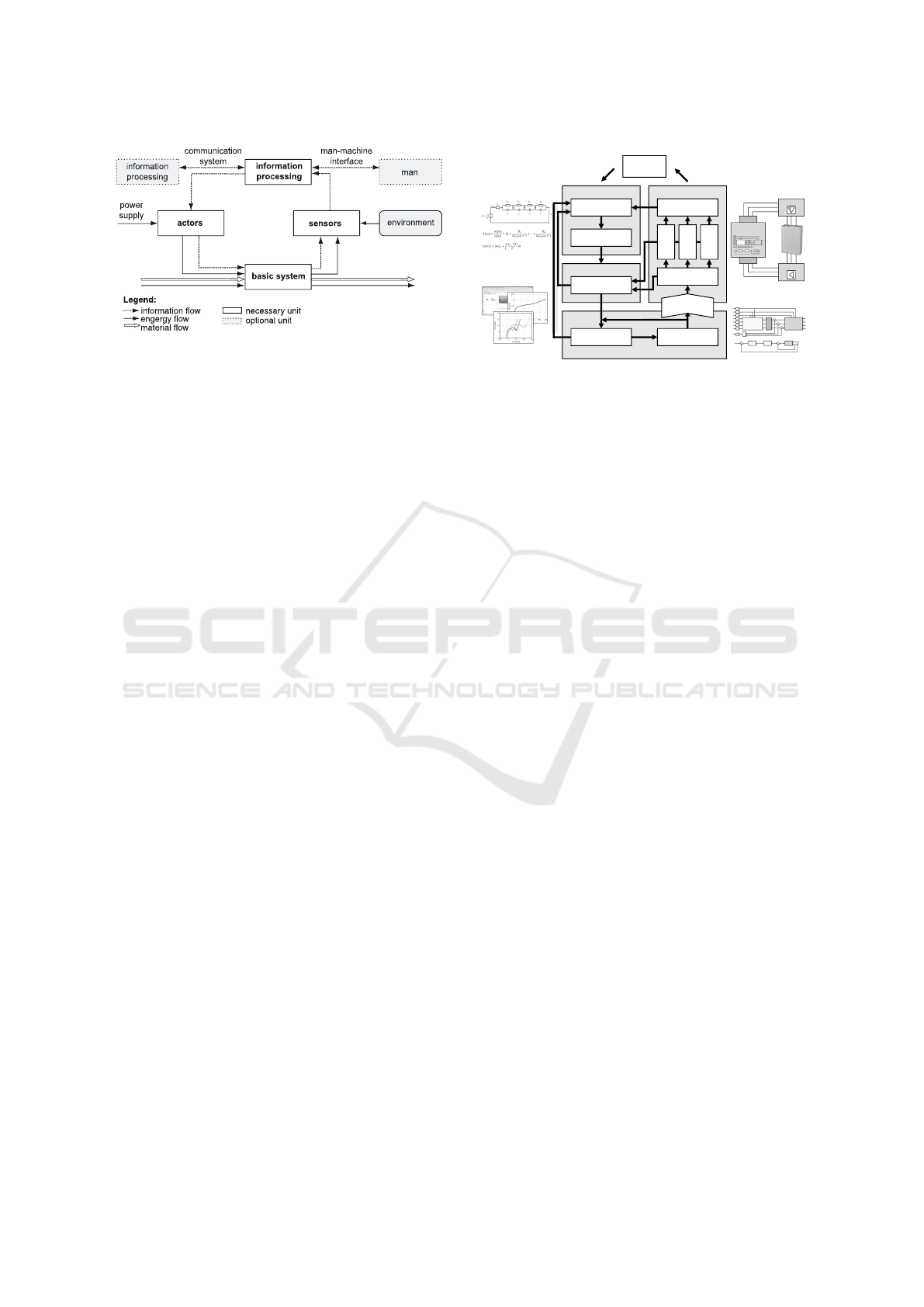
Figure 1: Basic structure of a mechatronic system according
to VDI 2206 (VDI, 2004).
tem) environment and can optionally have a human-
machine interface (HMI) and/or a communication in-
terface to other systems.
2.2 System Structuring
(Liu-Henke et al., 2002) describes an approach for
system structuring, that has been proven in numerous
research and development projects. It is based on the
generalized cascade principle, according to (L
¨
uckel
et al., 2001). A hierarchical structuring of the entire
system into encapsulated function modules with de-
fined interfaces is carried out in a top-down process.
It considers subordinate systems with higher dynam-
ics as part of the controlled system during design. The
following hierarchical levels are used for structuring:
• Mechatronic Function Module (MFM): The
MFMs are the basic elements of the system and
represent the lowest level of the hierarchy. They
consist of sensors, actuators, information process-
ing and basic system related mechanical structure.
This functionally encapsulated modules are the
most vital element of the system. It owns de-
fined physical and signal interfaces to the super-
ordinate parts.
• Mechatronic Function Group (MFG): The cou-
pling of several MFMs results in a MFG with its
own information processing and sensors. They
use the subordinate MFMs with their actuators
and mechanical structure. MFMs are mainly used
for structuring the information processing.
• Autonomous Mechatronic System (AMS): Sev-
eral MFGs, which are coupled by physical and
signal interfaces form an AMS in their entirety.
An AMS is completely independent of its envi-
ronment and has its own sensors and information
processing. It includes the top level of the me-
chanical structure.
• Cross-linked Mechatronic System (CMS): The
CMS is an signal based coupling of several AMS
modelling
analysis/synthesis
testing
hierarchic control
structure
hierarchic
control
structure
D/A
A/D
sensors
amplifiers
modelling
analysis (MiL)
testing
control design (MiL)
physical modelling
mathematic
modelling
analysis of the
controlled system
field test
requirements
specifications
requirements and
specifications
fulfilled
RCP
fullpassing
Hardware-
in-the-Loop
RCP
bypassing
Software-in-the-
Loop
automated code
generation
system
analysis of
system behaviour
synthesis and
control design
Figure 2: Mechatronic development cycle for design and
testing according to (Liu-Henke et al., 2002).
and is the top hierarchical level. It coordinates
and optimizes operations by regulating the flow of
information and passing on decisions that affect
all the AMSs in the network.
2.3 Design and Testing
After structuring the system, design and testing are
carried out seamlessly model-based, using the mecha-
tronic development cycle by (Liu-Henke et al., 2002)
(Figure 2) in the bottom-up procedure. This is charac-
terized by iteration possibilities at any time as well as
tests in early phases of the design, so that failures can
be eliminated at an early stage. This reduces the de-
velopment time and thus ultimately the development
costs.
The development cycle begins, always taking into
account the requirements and specifications, with the
description of the basic system in a physical and
mathematical model. The parameters are determined
from technical documents or by measurements on
the real (sub-)system in frequency and time domain.
Hardware-in-the-Loop (HiL) test benches, for exam-
ple, can be used for this purpose. Subsequently, the
model is validated and verified by comparing the sim-
ulation results with measurement data.
This modelling process is followed by an analy-
sis of the system behavior, using model-in-the-loop
(MiL) simulations. If the requirements, e.g. for mod-
eling depth and accuracy, are not met, a feedback loop
to the modeling takes place. The analysis results are
then used for function design and synthesis. Further
MiL simulations are used to analyze and optimize the
controlled system with respect to the specifications.
Once a sufficient functional state has been reached,
the function is transformed to program code (e.g. C
code) by automated code-generation without error-
prone manual programming. For testing, this gener-
ated code is examined again in software-in-the-loop
ICSOFT 2021 - 16th International Conference on Software Technologies
216

(SiL) simulations before further verification and opti-
mization is carried out under real-time conditions in
rapid control prototyping (RCP) full- or bypassing or
in HiL simulations. Suitable development tools and
test benches are used for these tasks. Finally, field
tests are carried out, which end the mechatronic de-
velopment cycle when all requirements and specifica-
tions are met.
2.4 Development Platforms
The presented development and testing process
is seamlessly supported by a highly automated
computer-aided engineering (CAE) development
platform, consisting of software and hardware (Liu-
Henke et al., 2014). The resulting minimization of
manual work avoids random errors and significantly
reduces development time. The high reproducibility
of the results also simplifies validation and certifica-
tion processes.
In the industry, the expensive combination of Mat-
lab / Simulink and a real-time system from dSPACE
(Hanselmann, 1996) is widely used (Liu-Henke et al.,
2014). The model is built using existing libraries
such as the dSPACE Automotive Simulation Model
(ASM). For analysis and synthesis, extensive Matlab
/ Simulink functions such as pole/zero calculation or
frequency response analyzers are available. Using the
Simulink Coder, the developed function model can
be automatically transformed into C code and then
be implemented on a target hardware using dSPACE
Real-Time Interface. Depending on the requirements,
a selection of different real-time platforms such as the
Scalexio system is available. Online experiments for
measurement and calibration tasks can be performed
via the HMI ControlDesk by using widespread proto-
cols like the Universal Measurement and Calibration
Protocol (XCP) (Lemon, 2003).
3 CONCEPTION
3.1 Challenges
Customers and users are constantly demanding inno-
vations and more functionality at ever shorter inter-
vals. This challenge can only be met by high end
mechatronic products. These growing demands are
accompanied by increased system complexity, which
on the one hand makes the system design and test-
ing increasingly complicated and on the other hand
requires a higher level of safety. Shorter product
life-cycles and increasing competition in the course
of globalization are exerting ever greater cost pres-
sure, especially on SMEs. Furthermore, the increas-
ing individualization of systems or products to meet
customer demands requires that the user and his us-
age behavior must be considered during development.
Current methods of MiL, SiL and HiL simulation are
performed ”open-loop”, i.e. without integration of the
user into the control loop. This results in user needs
being disregarded.
Due to the increasing computing power, more
and more AI-based functions are being used. How-
ever, their behavior in unknown situations is not pre-
dictable due to their complex structure (Montavon
et al., 2018). Therefore, especially high demands are
placed on the verification of such methods (Aeberhard
et al., 2015). Also, in contrast to conventional func-
tions, the design is no longer possible analytically but
is done via machine learning. For these processes, a
lot of preprocessed data is needed, which covers most
operating situations.
Another challenge is the increasing networking
of mechatronic systems in CPS and the IoT. This
makes new types and sources of information avail-
able, which can lead to innovative, cross-system func-
tionalities. The use of novel algorithms and proce-
dures changes the system structure and sometimes re-
sults in deviations from the generalized cascade prin-
ciple (cf. section 2.2), since not only reference val-
ues but also further information may be communi-
cated between different hierarchical levels. In addi-
tion, tests for validation in the real system environ-
ment are often safety-critical. Tests for validation in
a virtual simulation environment, on the other hand,
usually do not offer any possibility for the system to
interact with the user.
It is obvious, that existing methods have to be ex-
tended, based on the new requirements. Also, com-
pletely new methods need to be developed. Further-
more, there is only one approach known that tries to
deal with these challenges. Further research as pre-
sented in this paper is necessary.
3.2 Requirements for the Holistic
Methodology
The requirements for the holistic methodology are de-
rived from the challenges by using a structured anal-
ysis, intensive literature review and experience from
various projects. In the following, the main require-
ments for a holistic methodology, which result from
the challenges elaborated above, are derived.
R1 A procedure for system structuring is required to
reduce the complexity of the strongly intercon-
nected system by defining encapsulated functional
A Holistic Methodology for Model-based Design of Mechatronic Systems in Digitized and Connected System Environments
217

modules with clearly specified interfaces to each
other. In addition to existing approaches (cf. sec-
tion 2), this procedure must offer opportunities to
deviate from the generalized cascade principle.
R2 The development process has to be supplemented
by a system for requirements management in or-
der to take these fully into account on the one
hand and to be able to check their fulfillment on
the other. This is particularly necessary from the
point of view of interdisciplinary cooperation.
R3 The functional design and testing shall be supple-
mented by a system for data management of learn-
ing and test data. The data management system
must enable the data to be reused and thus enable
reproducible test scenarios.
R4 To generate the exorbitantly large amount of test
data, it must be possible to supplement real data
with synthetic data from simulation-based devel-
opment tools.
R5 Functional safeguarding shall evaluate the behav-
ior of complex functions (like AI) with respect
to safety of the intended functionality (SOTIF,
cf. (ISO, 2019)) and functional safety (cf. (ISO,
2018)). It shall be possible to reliably detect faulty
learning results such as under- and overfitting.
R6 HiL technology must be used and extended to
minimize safety risks and to perform reproducible
learning and test scenarios for interconnected sys-
tems under real operating conditions in real-time.
R7 Methods to ensure the real-time capability of
novel functions based on AI and Big Data must
be integrated into the design process.
R8 There shall be possibilities to consider the user in
the testing process by closed-loop simulations.
R9 The development tools for applying the methodol-
ogy should also be affordable for SMEs to enable
them to maintain and increase their competitive-
ness.
3.3 Conception of the Holistic
Methodology
In order to meet the requirements derived in sec-
tion 3.2, the following elements are added to the
methodology presented in section 2:
• Extended System Structuring: Two new hier-
archical levels in mechatronic system structuring
are introduced to meet the requirements of CPS
and deviations from the generalized cascade prin-
ciple.
• Advanced Design and Testing Process: The de-
sign and testing process is extended by a system-
atic requirements management, a continuous data
management and an evaluation management. In
addition, measures to ensure real-time capability
throughout the process are considered.
• Closed-loop Driving Simulator: The process
gap between open-loop simulation methods (MiL,
SiL, HiL) and prototype testing is closed for au-
tomotive applications by integrating a closed-loop
driving simulator.
• Development Platform: A low-cost RCP de-
velopment platform is introduced, which enables
usage of the development methodology also by
SMEs.
4 HOLISTIC METHODOLOGY
4.1 Extended System Structuring
Since distributed systems with decentralized intelli-
gence in a cyber-physical environment have a highly
complex and heterogeneous structure, the method of
mechatronic structuring presented in section 2.2 is ex-
tended by two additional function levels to master the
system complexity:
• Autonomous Function Group (AFG): If several
AMS are networked with each other so that they
can exchange information, a swarm is formed,
which is called AFG. The autonomy of each in-
dividual AMS is still given, only the sum of avail-
able information has grown. The AFG has addi-
tional sensors that provide data for all subordinate
AMS. The difference to the original definition of
the CMS is that no decisions are made for sub-
ordinated systems, but information is exchanged
and cooperative operation is possible.
• Cross-linked Function Group (CFG): Several
CMSs can be grouped across domain boundaries
as CFG, so that data can be exchanged in struc-
tured clusters. A CFG establishes an exchange of
information between the CMS in the sense of a
complete networking and digitization.
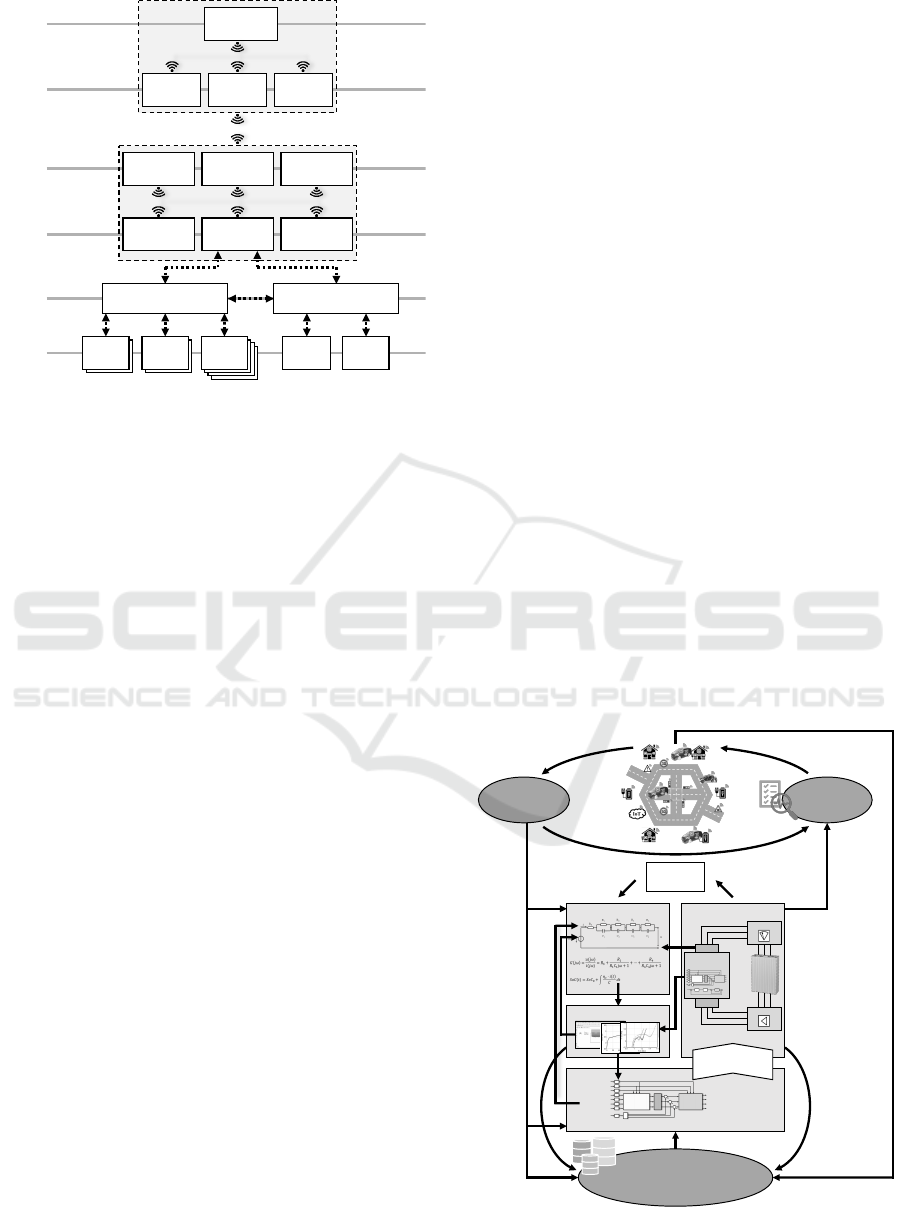
Furthermore, the interfaces of AMS and CMS
from section 2.2 are redefined. The application of this
extended approach to system structuring is explained
using the restructuring of FREDY as an example in
Figure 3. The advantage of this new structure is that
it allows differentiated treatment of systems outside
the vehicle at the levels above the AMS. In this way,
ICSOFT 2021 - 16th International Conference on Software Technologies
218
energy management
MFG
MFM
AMS
AFG
ego vehicle
management
(FREDY)
chassis management
Aktive
Lenkung
active
steering
Aktiver
Antrieb
active
drive
Aktive
Federung
Aktive
Federung
Aktive
Federung
…
battery
with BMS
fuel cell
CMS
CFG
cyber-physical
traffic system
parking
garage
management
intersection
management
further
cooperative
management
environmental
perception
cooperative
navigation
communication
further traffic
infrastructure
further traffic
participants
Figure 3: Hierarchical system structure of the mechatronic
system FREDY as an example (Liu-Henke et al., 2016).
the cooperative functionalities at AFG level can be de-
signed in a more targeted manner with a view to ex-
ploiting synergies by all participants. The spatially or
domain-specifically separated functionalities at CMS
level can be coupled to form a cyber-physical over-
all system that enables the transfer of information and
data between different CMS by CFG. This will enable
new functionalities using prediction and AI.
4.2 Advanced Design and Testing
Process
In the following, the extensions to the design and test-
ing process (cf. section 2.3) are described. The result-
ing new process is shown in Figure 4. Requirements
management, data management and evaluation man-
agement as well as the test level Driving Simulator-
in-the-Loop (DSiL) were added.
In order to meet the new challenges, despite the
increasing complexity of products or systems, the
mechatronic development cycle is expanded to in-
clude the requirements management process. This en-
sures systematic elicitation, documentation and man-
agement of requirements as well as their linking with
the system structure or its components. Requirements
management offers the possibility of managing dy-
namic requirements throughout the entire product de-
velopment process or life-cycle. It also clearly com-
municates and tracks changes of requirements and the
impact on the entire system (Inkermann et al., 2019).
In particular, AI algorithms or even functions
based on (V2X) communication often rely on enor-
mous amounts of data for design and validation. Also,
they generate a lot of data (Kumar et al., 2017).
Therefore, the tasks of data management are, among
others, the acquisition, preprocessing (like filtering or
annotation), storage and management of all required
and generated data, e.g., for training an artificial neu-
ral network. The origin of the data is flexible. De-
pending on the use case, they can originate, for exam-
ple, from measurements, the requirements, communi-
cation or simulations (Siddiqa et al., 2016).
The objective of design is a function that fulfills
the initially established requirements. The subsequent
verification of whether this goal has been achieved
takes place during function validation. However, this
usually generates a lot of information and signals with
a physical context, which, in the case of complex
systems, can hardly be reconstructed, despite a well-
founded understanding (Conrad et al., 2005). There-
fore, it is the task of evaluation management to trans-
form this data into a form that can be interpreted and
evaluated with reference to the requirements (Garousi
and Elberzhager, 2017).
The existing design and testing process (sec-
tion 2.3) contains only open-loop simulations without
user influence. For the design of vehicle mechatronic
systems, not only the driver assistance systems but
also the user’s (cognitive) behavior plays an important
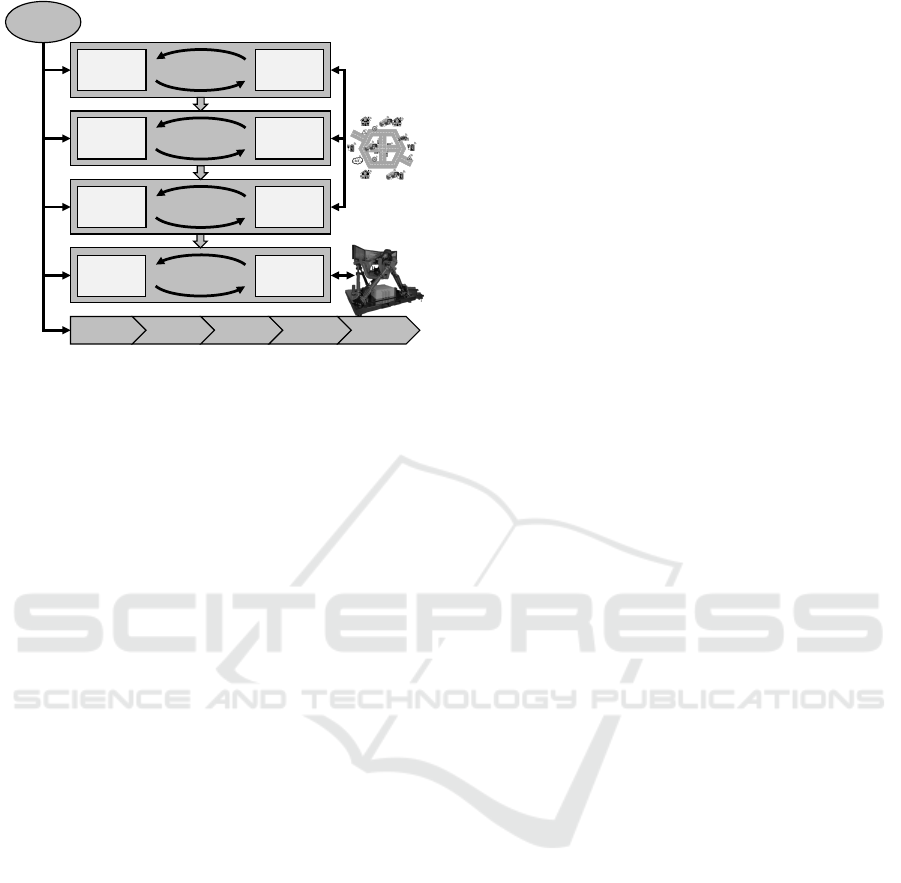
role. To take this influence into account, a multi func-
tional driving simulator can be used in the domain
of vehicle mechatronics. Therefore, the model-based,
verification-oriented development and validation pro-
cess was extended by the test level DSiL simulation in
addition to the already established MiL, SiL and HiL
modelling
analysis (MiL)
testing
control design (MiL)
requirements
specifications
requirements and
specifications fulfilled
automated code
generation
system
data management
for intelligent and cross-
linked information
processing
evaluation
management
requirements
management
hierarchic
control structure
D/A
A/D
sensors
amplifiers
Figure 4: Extended Mechatronic development cycle for de-
sign and testing.
A Holistic Methodology for Model-based Design of Mechatronic Systems in Digitized and Connected System Environments
219
requirements
management
system models
control
algorithms
Model-in-the-Loop
(MiL)
Software-in-the-Loop
(SiL)
system models
generated code,
external code,
dll, …
real-time
system models
real
components,
ECUs
Hardware-in-the-Loop
(HiL)
test
specifications
test
execution
test
documentation
test
evaluation
test
implementation
real-time
system models
incl. driver
real
components,
ECUs
Driving-Simulator-
in-the-Loop (DSiL)
measurement
validation
verification
measurement
validation
verification
Figure 5: Holistic model-based function development and
testing process extended by DSiL simulation.
simulations (cf. Figure 5).
5 SEAMLESS TOOL SUPPORT
5.1 Closed-loop Driving Simulator
Test scenarios can be carried out realistically and re-
producible including human behavior using a closed-
loop simulator. Key elements of the simulation sys-
tem are actuators for the stimulation of vestibular, au-
ditory and visual stimuli as well as sensors to mea-
sure the test person’s behavior. By using a hexapodic
motion platform, the test person’s sense of balance
is stimulated. The simulation is coordinated by a
higher-level simulator control computer. Sensors and
actuators are initially controlled locally by subordi-
nate control systems in mechatronic function groups.
Further communication with the higher-level simula-
tor components takes place via a central router using a
UDP Ethernet protocol. Due to the real-time informa-
tion processing, the simulator can be interfaced with
additional HiL test benches or real ECUs (Liu-Henke
et al., 2020a).
Using this simulator, the closed loop system in-
cluding the driver’s behavior can be investigated be-
fore tests are carried out in real prototypes (G
¨
ollner
and Tao, 2018). In addition, driver assistance func-
tions - e.g. assistance systems for pedestrian protec-
tion - can be tested without having to accept safety
risks in real driving tests. It is thus possible to in-
vestigate at an early stage of development how a user
reacts physiologically and psychologically in inter-
action with the functions and how the functions are
influenced by the human driver. Concrete examples
are the brake stuttering of an anti-lock braking sys-
tem (ABS), which can lead to an anxiety reaction or
the vehicle’s distance control system (ACC), which
may react unpredictably due to the intervention of the
driver. But higher-level autonomous driving functions
can also be tested.
5.2 Low-cost Development Platform
The development platform presented in section 2.4
supports the original development process. However,
in order to implement the enhancements presented in
this paper, various modifications and extensions are
necessary, especially in the area of requirements, data
and evaluation management. In addition, the combi-
nation presented is very cost-intensive and is therefore
only conditionally suitable for use in SMEs. The low-
cost RCP development platform LoRra (cf. (Jacob-
itz and Liu-Henke, 2020)) developed at Ostfalia ad-
dresses exactly these gaps. Based on the open-source
CAE environment Scilab/Xcos, a seamless platform
is provided to support the presented holistic develop-
ment and validation methodology, according to Fig-
ure 4. By using a low-cost microcontroller as real-
time hardware, SMEs will also be able to use the new
methodology.
The starting point for system design with the de-
velopment platform LoRra are the LoRra model li-
braries. By means of version and configuration man-
agement, existing models from previous projects can
be optimally used and further developed. The synthe-
sis and analysis of the controlled system is performed
by the dynamic system simulator Xcos, which is part
of the open source CAE environment Scilab. With the
LoRra code generator, Xcos models can be automati-
cally transformed into effective C code. Online simu-
lations are enabled by the LoRra Real-Time Interface
(RTI). This offers the possibility to control interfaces
of the real-time hardware from the model as well as
to implement the generated program automatically
on the real-time hardware (Jacobitz and Liu-Henke,
2019). Due to the open interfaces of the LoRra RTI,
the real-time hardware can be chosen flexibly, from
low-cost microcontrollers to powerful multi-core sys-
tems. As a human-machine interface for online exper-
iments, the integrated Graphical Experimental Soft-
ware (iGES) provides an intuitive graphical user inter-
face. Flexibly configurable instruments can be used to
measure functional states and manipulate parameters.
ICSOFT 2021 - 16th International Conference on Software Technologies
220

6 VERIFICATION BY CASE
STUDIES
In various currently ongoing and future research
and development projects, the presented development
methodology is applied, further verified and opti-
mized using the requirements from section 3. Fig-
ure 6 shows an example usage of data and evaluation
management for the model-based design of a function
for automated lateral guidance using Artificial Neu-
ral Networks (ANN) and Genetic Algorithms (GA).
ANN consist of several networked layers of comput-
ing units (neurons), similar to the human brain, which
accumulate input signals and calculate an associated
output. GA are nature-analogous optimization meth-
ods, which are suitable for training ANN.
These AI algorithms are very data- and
computation-intensive procedures, both in the
functional design and in their validation. Therefore,
data management was used to store and manage
all data needed for the training and test processes,
such as requirements, training routes, simulation
parameters and results. Evaluation management was
evaluation management
data management
0 100 200 300 400 500
-0.4
-0.2
0
0.2
y (m)
b) lateral deviation
0 100 200 300 400 500
-100
0
100
y (m)
a) test track 5
0 100 200 300 400 500
x (m)
-4
-2
0
2
4
(°)
c) steering angle
p
y
= 20% p
y
= 50% p
y
= 80%
a) cumulated crashs
02 04 08 16
0
1
2
n
hLay
=1 n
hLay
=2 n
hLay
=3
b) arrived individuals
02 04 08 16
0
2
4
c) Generations
02 04 08 16
hidden neurons per layer
0
2
4
0 200 400 600
-100
0
100
track 3
0 200 400 600
-0.5
0
0.5
lateral deviation
Fit
20%
Fit
50%
Fit
80%
0 200 400 600
-5
0
5
steering angle
0 200 400 600
-5
0
5
lateral acceleration
lateral deviation
RMS
20 50 80
0
0.2
0.4
steering angle speed
20 50 80
0
1
2
0 200 400 600 800 1000 1200
x (m)
-400
-200
0
200
y (m)
requirements management
Figure 6: Example of the requirements, data and evaluation
management for an AI application.
used to analyze the designed functions in detail and
to evaluate them with regard to the requirements.
The lower part of Figure 6 shows the result of an
ANN that meets the requirements for lane center
keeping without strong oscillations. The results of
the evaluation are fed back to the data management.
More information about this application can be found
in (Yarom et al., 2020). Further verifications were
performed by setting up a cyber-physical laboratory
test field for smart mobility applications (Liu-Henke
et al., 2020b) and a predictive energy management
system for fuel cell electric-hybrid vehicles in a
connected traffic system (Scherler et al., 2020).
7 CONCLUSION AND OUTLOOK
In this paper, first an overview of the current devel-
opment process of mechatronic systems is given. Af-
terwards, the presentation of current challenges due
to the changing technological framework (e.g. digiti-
zation and networking in CPS, increasing system in-
telligence through AI, increasing influence of user be-
havior on system development) is presented. Require-
ments are derived which are used to design measures
for the optimization of the development methodology.
These measures include on the one hand the extension
of the system structuring approach for the controlla-
bility of the increasingly complex system intercon-
nection. On the other hand, they include the extension
of the design and testing process by a requirements,
data and evaluation management as well as the inte-
gration of new technologies, e.g. for DSiL simulation,
to perform closed-loop simulations under realistic and
at the same time reproducible operating conditions.
In summary, a holistic methodology for model-
based development of connected digitized mecha-
tronic systems with seamless tool support was pre-
sented. Furthermore, a low-cost RCP development
platform (LoRra) is presented. With this platform, the
presented methodology can be applied even by SMEs.
The new holistic methodology was basically verified
by case studies from different application areas. Fur-
ther work is dealing with more extensive verification
and optimization of the seamless low-cost tool sup-
port. The focus here is in particular on the setup of a
cyber-physical laboratory test field for the real-time
simulation of complex networked mechatronic sys-
tems.
A Holistic Methodology for Model-based Design of Mechatronic Systems in Digitized and Connected System Environments
221

ACKNOWLEDGEMENTS
Funded by the Lower Saxony Ministry of Science
and Culture under grant number ZN3495 within the
Lower Saxony ”Vorab” of the Volkswagen Founda-
tion and supported by the Center for Digital Innova-
tions (ZDIN).
REFERENCES
Aeberhard, M., Rauch, S., Bahram, M., Tanzmeister, G.,
Thomas, J., Pilat, Y., Homm, F., Huber, W., and
Kaempchen, N. (2015). Experience, Results and
Lessons Learned from Automated Driving on Ger-
many’s Highways. IEEE Intelligent Transportation
Systems Magazine, 7(1):42–57.
Alshareef, A. and Sarjoughian, H. S. (2018). Model-driven
time-accurate DEVS-based approaches for CPS de-
sign. In Model-driven Approaches for Simulation En-
gineering. Society for Modeling and Simulation Inter-
national.
Conrad, M., Sadeghipour, S., and Wiesbrock, H.-W. (2005).
Automatic Evaluation of ECU Software Tests. In SAE
Technical Paper Series, volume 2005-01-1659, War-
rendale, PA, United States. SAE International.
Garousi, V. and Elberzhager, F. (2017). Test Automation:
Not Just for Test Execution. IEEE Software, 34(2):90–
96.
G
¨
ollner, M. and Tao, H. (2018). Simulator develop-
ment. Automotive Testing Technology International,
September 2018:102–106.
Hanselmann, H. (1996). Automotive control: from con-
cept to experiment to product. In Proceedings of the
Joint Conference on Control Applications Intelligent
Control and Computer Aided Control System Design,
pages 129–134.
Inkermann, D., Huth, T., Vietor, T., Grewe, A., Knieke,
C., and Rausch, A. (2019). Model-Based Require-
ment Engineering to Support Development of Com-
plex Systems. Procedia CIRP, 84:239–244.
ISO (2018). Road vehicles - Functional safety. Number ISO
26262:2018. Beuth Verlag GmbH, Berlin, Germany.
ISO (2019). Road vehicles: Safety of the intended func-
tionality. Number ISO/PAS 21448:2019. Beuth Ver-
lag GmbH, Berlin, Germany.
Jacobitz, S. and Liu-Henke, X. (2019). A Real-Time
Interface for Xcos – Demonstrated on a Battery-
management System. In Proceedings of the 2nd Scilab
Conference.
Jacobitz, S. and Liu-Henke, X. (2020). The Seamless
Low-cost Development Platform LoRra for Model
based Systems Engineering. In Proceedings of the
8th International Conference on Model-Driven En-
gineering and Software Development, pages 57–64.
SCITEPRESS.
Kumar, A., Boehm, M., and Yang, J. (2017). Data Man-
agement in Machine Learning. In Proceedings of
the 2017 ACM International Conference on Manage-
ment of Data, pages 1717–1722, New York, NY, USA.
ACM.
Lemon, K. (2003). Introduction to the Universal Measure-
ment and Calibration Protocol XCP. In SAE Technical
Paper Series, Warrendale, PA, United States. SAE In-
ternational.
Liu-Henke, X., Feind, R., Roch, M., and Quantmeyer,
F. (2014). Investigation of low-cost open-source
platforms for developing of mechatronic functions
with rapid control prototyping. In 10th International
Conference on Mechatronic Systems and Materials,
Opole, Polen.
Liu-Henke, X., Gollner, M., Jacobitz, S., Scherler, S.,
Zhang, J., and Yarom, O. A. (2020a). Driving-
Simulator-in-the-Loop — Virtual Function Design
with Consideration of Human Behaviour. In IEEE In-
ternational Symposium on Systems Engineering.
Liu-Henke, X., Jacobitz, S., Gollner, M., Zhang, J., Scher-
ler, S., and Yarom, O. A. (2020b). Cyber-physical
Industry 4.0 laboratory test field to simulate self-
optimizing intralogistics. In 19th International Con-
ference on Mechatronics.
Liu-Henke, X., L
¨
uckel, J., and J
¨
aker, K.-P. (2002). An ac-
tive suspension/tilt system for a mechatronic railway
carriage. Journal of IFAC - Control Engineering Prac-
tice, 10(9):991–998.
Liu-Henke, X., Scherler, S., Fritsch, M., and Quantmeyer,
F. (2016). Holistic development of a full-active elec-
tric vehicle by means of a model-based systems engi-
neering. In IEEE International Symposium on Systems
Engineering.
L
¨
uckel, J., Hestermeyer, T., and Liu-Henke, X. (2001).
Generalization of the cascade principle in view of
a structured form of mechatronic systems. In
IEEE/ASME International Conference on Advanced
Intelligent Mechatronics, pages 123–128.
Maldonado, L., Chang, W., Roy, D., Annaswamy, A.,
Goswami, D., and Chakraborty, S. (2019). Exploiting
System Dynamics for Resource-Efficient Automotive
CPS Design. In Design, Automation & Test in Europe
Conference & Exhibition, pages 234–239.
Matt, D., Modrak, V., and Zsifkovits, H. E. (2020). Industry
4.0 for SMEs: Challenges, opportunities and require-
ments. Springer International Publishing, Cham.
Montavon, G., Samek, W., and M
¨
uller, K.-R. (2018). Meth-
ods for interpreting and understanding deep neural
networks. Digital Signal Processing, 73:1–15.
Scherler, S., Liu-Henke, X., and Henke, M. (2020). Pre-
dictive Energy Management for an Electric Vehicle
with Fuel Cell Range Extender in Connected Traffic
Systems. In 19th International Conference on Mecha-
tronics - Mechatronika. IEEE.
ICSOFT 2021 - 16th International Conference on Software Technologies
222

Siddiqa, A., Hashem, I. A. T., Yaqoob, I., Marjani, M.,
Shamshirband, S., Gani, A., and Nasaruddin, F.
(2016). A survey of big data management: Taxonomy
and state-of-the-art. Journal of Network and Com-
puter Applications, 71:151–166.
VDI, editor (2004). Design methodology formechatronic
systems. Number VDI 2206:2004-06. Beuth Verlag
GmbH, Berlin, Germany.
Yarom, O., Scherler, S., Goellner, M., and Liu-Henke, X.
(2020). Artificial Neural Networks and Reinforce-
ment Learning for Model-based Design of an Au-
tomated Vehicle Guidance System. In 12th Inter-
national Conference on Agents and Artificial Intelli-
gence, pages 725–733. SCITEPRESS.
Zhou, H., Xu, W., Chen, J., and Wang, W. (2020). Evolu-
tionary V2X Technologies Toward the Internet of Ve-
hicles: Challenges and Opportunities. Proceedings of
the IEEE, 108(2):308–323.
A Holistic Methodology for Model-based Design of Mechatronic Systems in Digitized and Connected System Environments
223
