
A Robust CNN Training Approach to Address Hierarchical Localization
with Omnidirectional Images
Juan Jos
´
e Cabrera, Sergio Cebollada
a
, Luis Pay
´
a
b
, Mar
´
ıa Flores
c
and Oscar Reinoso
d
Department of Systems Engineering and Automation, Miguel Hern
´
andez University, Elche, Spain
Keywords:
Hierarchical Localization, Omnidirectional Imaging, Deep Learning, Bayesian Optimization.
Abstract:
This paper reports and evaluates the training optimization process of a Convolutional Neural Network (CNN)
with the aim of addressing the localization of a mobile robot. The proposed method addresses the localization
problem by means of a hierarchical approach by using a visual sensor that provides omnidirectional images.
In this sense, AlexNet is adapted and re-trained with a twofold purpose. First, the rough localization step
consists of a room retrieval task. Second, the fine localization step within the retrieved room is carried out by
means of a nearest neighbour search by comparing a holistic descriptor obtained from the CNN with the visual
model of the retrieved room. The novelty of the present work lies in the use of a CNN and holistic descriptors
obtained from raw omnidirectional images as captured by the vision system, with no panoramic conversion.
In addition, this work proposes the use of a data augmentation technique and a Bayesian optimization to
address the training process of the CNN. These approaches constitute an efficient and robust solution to the
localization problem, as shown in the experimental section even in presence of substantial changes of the
lighting conditions.
1 INTRODUCTION
In recent years, the use of omnidirectional cameras
along with computer vision techniques has proven to
be a robust solution to address the task of localization
in mobile autonomous robotics. This kind of images
provide a lot of information with a 360 degree field
of view around it and the cost of the camera is rela-
tively low compared to other types of sensors. In ad-
dition, holistic (or global-appearance) description ap-
proaches have been also proven to present a success-
ful solution for extracting the most relevant informa-
tion from images, as they lead to more direct location
algorithms based on a pairwise comparison between
descriptors.
As for the mapping task, using hierarchical mod-
els with holistic descriptors allows solving the local-
ization task efficiently. This method involves sort-
ing the visual information hierarchically into different
layers of information in such a way that the localiza-
tion can be resolved in two main steps. First, a rough
localization to know an area of the environment, and
a
https://orcid.org/0000-0003-4047-3841
b
https://orcid.org/0000-0002-3045-4316
c
https://orcid.org/0000-0003-1117-0868
d
https://orcid.org/0000-0002-1065-8944
second, a fine localization, which is tackled in that
pre-selected area.
Furthermore, using artificial intelligence (AI)
techniques to carry out computer vision and robotics
problems has emerged during the past few years. This
is due to the fact that faster and more efficient hard-
ware devices are available with a relative low cost.
Among AI techniques, convolutional neural networks
(CNN) are a very popular technique for tackling a va-
riety of problems in mobile robotics. In the light of
the training process, this should be robust and varied.
This process plays an important role in the success of
the desired tasks. Hence, two topics should be espe-
cially considered: (1) a large set of training data must
be available and (2) training parameters must be cau-
tiously selected.
In light of the above information, the aim of this
work is to introduce and evaluate the performance of
a CNN training which is used to address the mapping
and localization tasks by using convolutional neural
networks. The efficiency of these techniques will be
assessed through the success for room retrieval and
the ability of the proposed approach to robustly esti-
mate the robot’s position using the information stored
on the map. This evaluation is done by using only the
set of images obtained by an omnidirectional vision
Cabrera, J., Cebollada, S., Payá, L., Flores, M. and Reinoso, O.
A Robust CNN Training Approach to Address Hierarchical Localization with Omnidirectional Images.
DOI: 10.5220/0010574603010310
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 301-310
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
301

sensor installed on the mobile robot, which moves in
an indoor environment in real operating conditions.
The novelty of the present work is a localization
approach based on a CNN which departs from omni-
directional images. Also, this work presents a CNN
training optimization process to carry out efficiently
the training task. In general, the objective of this work
is to re-adapt and use a CNN with a dual purpose: (1)
retrieving in which room the robot is currently located
(rough localization step) and (2) refining this localiza-
tion within the recovered room (fine localization step)
by means of global-appearance descriptors obtained
from intermediate layers of the CNN itself. Our main
contributions in this work can be summarized as fol-
lows.
• We adapt and train a CNN with the aim of retriev-
ing the room where an omnidirectional image was
captured.
• We propose a training process based on a data
augmentation approach and a training optimiza-
tion.
• We study the use of the proposed deep learning
technique to address localization in a hierarchical
way.
The remainder of the paper is structured as fol-
lows. Section 2 presents a review of the related lit-
erature. After that, section 3 presents the methods to
train the adapted CNN. Section 4 explains the pro-
posed localization method based on the adapted CNN
and presents all the experiments which were tackled
to test the validity of the proposed methods. Finally,
section 5 presents the conclusions and future works.
2 STATE OF THE ART
A variety of problems in computer vision and robotics
have been recently solved by using machine learn-
ing techniques (Cebollada et al., 2021). For instance,
Dymczyk et al. (2018) propose to tackle the localiza-
tion task by using a classifier that classifies landmark
observations. Regarding deep learning, this subfield
of machine learning has gained much interest due to
the improvements in processing systems. This tech-
nique has gained popularity in the field of robotics in
the last few years. For example, Shvets et al. (2018)
use segmentation to distinguish between different sur-
gical instruments. Levine et al. (2018) propose a con-
volutional neural network for robotic grasping from
monocular images by learning a hand-eye coordina-
tion. Regarding the use of CNNs in the field of mobile
robotics, many works have proven success by using
this tool. For instance, Sinha et al. (2018) propose a
robot re-localization in GPS-denied environments by
using a CNN to process data from a monocular cam-
era. Chaves et al. (2019) use a CNN to detect objects
in images and use this to build a semantic map.
Regarding the use of the visual information, in
line with previous works (Cebollada et al., 2019), the
present work focuses on addressing the mapping and
localization tasks by means of obtaining a unique de-
scriptor per image which contains global information
about it. A wide range of works has been proposed in
mobile robotics by using holistic descriptors. Origi-
nally, global-appearance description is based on hand-
crafted methods, that is, they depart from an image
and tackle some mathematical transformations to ob-
tain a single vector (
~
d ∈ R
l×1
) with characteristic in-
formation from the image.
Nevertheless, recently proposed works have pro-
posed the use of holistic descriptors that are calcu-
lated by using intermediate layers of CNNs. In this
regard, hidden layers provide descriptors that can be
used to characterize input data. To cite some ex-
amples, Arroyo et al. (2016) use a CNN that learns
to generate descriptors that are robust against station
changes, hence, they can be used to perform a long-
term localization task. More recently, Wozniak et al.
(2018) propose the use of feature extraction from a
Support Vector Machines (SVM) classifier. Cebol-
lada et al. (2020) show the advantages of using de-
scriptors obtained from the intermediate layers of a
retrained CNN to solve the localization as a batch im-
age retrieval problem. Nevertheless, this work pro-
poses a CNN based on panoramic images. Hence, in
order to work with omnidirectional images, a previ-
ous transformation to panoramic must be carried out.
As for the training process, deep learning tools re-
quire a large dataset. This is essential to obtain robust-
enough performances. However, in some cases, the
available dataset for training is small and, then, the
deep model cannot be trained properly. Among the
proposed techniques to address this problem, the
present work focuses on data augmentation and an
optimization of the training hyperparameters. Con-
cerning the data augmentation technique, this im-
proves the training performance of the model by in-
creasing the number of training instances and avoid-
ing over-fitting. Data augmentation basically consists
of creating new data (in this case, images) by apply-
ing different effects on the original ones. Some au-
thors have used data augmentation to improve their
deep learning tasks. For example, Ding et al. (2016)
use three data augmentation methods to tackle a Syn-
thetic Aperture Radar target recognition. The aim of
this work is to make the network robust against tar-
get translation, speckle variation in different observa-
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
302

tions, and pose missing. Salamon and Bello (2017)
propose audio data augmentation for overcoming the
problem of environmental sound data scarcity. By us-
ing this technique, they are able to develop a CNN
which is able to classify these data. Nevertheless,
none of the previously proposed data augmentation
methods match the visual effects that can occur when
the robot moves through the target environment under
real-operation conditions.
Regarding the optimization of training hypepa-
rameters, in the machine learning field, the hyperpa-
rameters are those values whose configuration is ex-
ternal and are not learned from the data. For exam-
ple, whereas the weights of the CNNs are parame-
ters (they are learned during the training process), the
learning rate is a hyperparameters (it is established
by the CNN architect and it is not learned during the
training process). Hence, hyperparameters are used
in processes to help to estimate the model parameters.
This kind of parameters are usually specified by the
practitioner and tuned according to a given predictive
modelling problem. The designer of the network can-
not know in advance the best hyperparameter values
on a given problem. Therefore, they may use rules of
thumb, copy values used on other problems, or search
for the best value by trial and error.
The correct training of many machine learning
methods depends to a large extent on hyperparame-
ters settings and thus on the method used to set hy-
perparameters. Optimization methods such as grid
search and random search have been shown to outper-
form established methods for this problem (Bergstra
and Bengio, 2012). These methods have been ca-
pable of obtaining similar or better hyperparameter
settings than the established by human domain ex-
perts (Bergstra et al., 2013; Kotthoff et al., 2019).
As a result, hyperparameter optimization has become
an active research area (Bergstra and Bengio, 2012;
Falkner et al., 2018; Feurer and Hutter, 2019). Dur-
ing the past few years, Bayesian optimization has
emerged as an efficient framework, achieving impres-
sive successes (Snoek et al., 2015; Domhan et al.,
2015). Through the Bayesian optimization, the loss
minimization is seen as a “black-box” problem, with
the aim of finding argmin
x∈X
( f (x)), where x ∈ X are
the hyperparameters and f(x) is the loss function of
the model.
Concerning the localization task from a hierarchi-
cal point of view, previous works (Cebollada et al.,
2019; Pay
´
a et al., 2018) have demonstrated that using
these models with holistic descriptors and omnidirec-
tional images leads to an efficient and robust solution
to tackle the localization task. These previous works
consist basically of calculating the nearest neighbour
in two layers. First, for the high-level layer, the visual
descriptors are grouped according to their similitude
and a representative descriptor R = {~r
1
,~r
2
,...,~r
n
g
} is
obtained for each group, where n
g
is the number of
groups. Afterward, in order to solve the localization
task, a new image is obtained im
test
and its holistic
descriptor is calculated
~
d
test
. This descriptor is com-
pared with all the representatives R and the most sim-
ilar representative ~r
k
is retained (rough localization
step); after that, a new comparison is carried out be-
tween
~
d
test
and the descriptors contained in the group
k, D
k
= {
~
d
k,1
,
~
d
k,2
,...,
~
d
k,N
k
}. Finally, the position of
the image im
test
is estimated as the position where the
most similar image in the k-th group was captured
(fine localization step).
Hence, this work proposes addressing a hierar-
chical localization task by using a CNN, which has
been trained with omnidirectional images, to obtain a
model with the aim of: (a) retrieving the room where
the image was captured and (b) obtaining global-
appearance descriptors departing from the re-trained
network and solving the fine localization by means
of an image retrieval problem. With this aim, a pre-
trained CNN architecture is re-adapted and re-trained.
Additionally, with the aim of improving the training
process, this work presents a data augmentation tech-
nique and a Bayesian optimization of the main hyper-
parameters. The aim of this work is to provide a feasi-
ble solution that simplifies the CNN development and
also solves efficiently the localization task concerning
localization error.
3 TRAINING PROCESS
The idea of the present work is to build a deep learn-
ing tool that, apart from retrieving the room where
the image was captured, is also capable of providing
holistic description information that characterizes the
image better than hand-crafted methods. As for the
CNN to tackle a classification task, the idea basically
consists of training the network with visual data and
the corresponding labelling for each image from the
training dataset. Once the CNN is properly trained, it
will be able to solve the rough localization step (i.e.,
the room retrieval). Moreover, this work proposes to
use the layers of the re-trained CNN to obtain holis-
tic descriptors and to use those descriptors to estimate
the position within a room where an omnidirectional
image was captured.
A Robust CNN Training Approach to Address Hierarchical Localization with Omnidirectional Images
303

3.1 CNN Adaption
Due to the fact that building and training a net-
work from scratch requires experience with network
architectures, a huge amount of data for training,
and, hence, a significant computing time. This
work continues the proposal carried out in previous
works (Cebollada et al., 2020): adapting and train-
ing networks. This work proposes departing from the
AlexNet (Krizhevsky et al., 2012), since it presents
a basic architecture and has been successfully used
in previous works to develop new classification tasks
by means of transfer learning (such as Han et al.
(2018)). Also, it presented successful results by
means of architecture re-adaption and retraining (Ce-
bollada et al., 2020). Unlike these previous works,
which were based on conventional (non-panoramic
and panoramic) images, the aim of the present work
is to study the feasibility of this architecture by de-
parting from omnidirectional images. This proposal
presents a twofold benefit: (1) saving computing time,
since it is not necessary a transformation from om-
nidirectional to panoramic images and (2) obtaining
holistic descriptors based on omnidirectional images,
which have been scarcely proposed in the current state
of the art. Moreover, the present work also develops
a robust hyperparameters optimization with the aim
of addressing an optimal training of the deep learning
model.
Therefore, first, some layers of the AlexNet ar-
chitecture are modified to adapt the network to the
proposed room retrieval task. In this case, the layers
fully-connected layer ( f c
8
), softmax layer and clas-
sification layer are replaced. The layer f c
8
is re-
adapted to output a vector of nine components. The
softmax and classification layers are replaced to cal-
culate the probabilities among nine categories and to
compute the cross-entropy loss for multi-class classi-
fication with nine classes (classification into one of
the 9 rooms that the target environment contains).
Fig. 1 shows the architecture used throughout this
work.
3.2 Data Augmentation
Data augmentation technique has been proposed as a
method to improve the performance of the model by
augmenting the number of training instances and pre-
venting over-fitting. This basically consists of creat-
ing new pieces of ‘data’ by applying different effects.
Moreover, by considering visual effects, the deep
learning model ‘learns’ to be robust against them. Re-
garding the present work, the data augmentation pro-
posed consists of applying visual effects over the orig-
inal images from the training dataset. The effects ap-
plied are those that can actually occur when images
are captured in real operating conditions:
• Rotation: A random rotation between 10 and 350
degrees is applied over the omnidirectional image.
• Reflection: The panoramic image is reflected.
• Brightness: The low intensity values are re-
adjusted (increased) in order to create a new im-
age brighter than the original one.
• Darkness: The high intensity values are re-
adjusted (decreased) in order to create a new im-
age darker than the original one. The brightness
and darkness effects try to imitate the changes
that the illumination conditions of the environ-
ment may experience. Moreover, no brightness
and darkness are applied at the same time on the
same image.
• Gaussian Noise: White Gaussian noise is added
to the image.
• Occlusion: This effect simulates the cases when
some parts of the picture are hidden either by
some parts of the sensor setup, or some event
(such as a person who is in front of an object).
This effect is applied by introducing geometrical
gray objects over random parts of the image.
• Blur Effect: This effect occurs when the image is
captured while the camera is moving (the image
is blurred).
Fig. 2 shows some examples of the effects applied
over a training image. The first image is the orig-
inal one, obtained directly from the original training
dataset, the rest of the images are the original but with
a visual effect over them. Departing from the original
training dataset, which contains 519 images, the data
augmentation is applied and either one or more than
one effects are simultaneously applied (except for the
bright and dark effects). Hence, the total number of
training images is enlarged to 49824 images.
3.3 Bayesian Optimization
The proposed hyperparameters optimization consists
of varying those values which can be crucial to ad-
dress the training process and, at the same time, can
be very different depending on the objective of the
network. The aim of finding the best setting is to opti-
mize the training process of the CNNs. The hyperpa-
rameters considered to be evaluated are the following:
• Max Epochs. Positive integer value that indicates
the maximum number of epochs to use for train-
ing.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
304
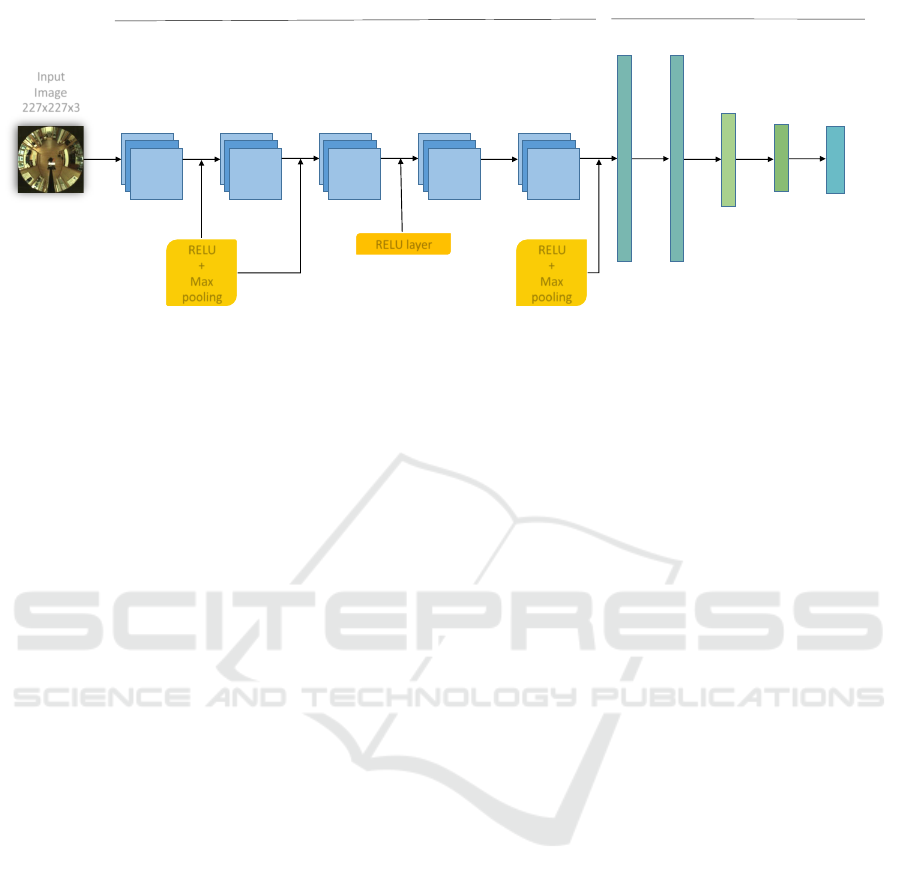
Input
Image
227x227x3
Conv 1
Conv 2
Conv 3
Conv 4
Conv 5
FC6 FC7
FC8
Softmax
Classification
output layer
RELU
+
Max
pooling
RELU
+
Max
pooling
FEATURE LEARNING CLASSIFICATION
RELU layer
Figure 1: Architecture of the CNN. This network was created departing from AlexNet, adapted and re-trained to retrieve the
room where the image was captured within the Freiburg dataset.
• Initial Learn Rate. Positive scalar value that con-
trols how much to change the model in response
to the estimated error each time the model weights
are updated.
• Momentum. Scalar value from 0 to 1 that indi-
cates the contribution of the parameter update step
of the previous iteration to the current iteration. A
value of 0 means no contribution from the pre-
vious step, whereas a value of 1 means maximal
contribution from the previous step. This hyper-
parameter is only used with SGDM.
• L2 Regularization. Positive scalar value that
adds a regularization term for the weights to the
loss function. The regularization term is also
called weight decay.
• Squared Gradient Decay Factor. Positive scalar
(less than 1) that indicates the decay rate of
squared gradient moving average. This hyperpa-
rameter is only used with Adam and RMSProp.
• Gradient Decay Factor. Positive scalar (less than
1) that indicates the decay rate of gradient moving
average. This hyperparameter is only used with
Adam.
• Epsilon. Positive scalar that indicates denomina-
tor offset. That is, the solver adds the offset to
the denominator in the network parameter updates
to avoid division by zero. This hyperparameter is
only used with Adam and RMSProp.
4 EXPERIMENTS
4.1 Localization
This work proposes to use the CNN as a hierarchical
model with the aim of: (a) addressing the rough local-
ization as a room retrieval problem (high-level layer)
departing from the test image and (b) obtaining holis-
tic descriptors from the input images. The descriptors
of the training images will form the low-level layer,
and they allow to solve a fine localization as an image
retrieval problem, with the holistic descriptors of the
test images (also obtained from the CNN).
Regarding the hierarchical localization, the high-
level layers permit a rough localization and the low-
level layers a fine localization. The rough step pro-
vides faster localization and the fine step considers
more accurate information which is used to perform
a fine localization step. The proposed hierarchical lo-
calization is carried out as the diagram in fig. 3 shows.
First (rough localization step), a test image im
test
is in-
troduced into the CNN and the most likely room c
i
in
which the image was captured is estimated from the
information in the output layers. At the same time,
the CNN is also capable of providing holistic descrip-
tors from intermediate layers. Subsequently, after re-
trieving the room, a more accurate localization is con-
ducted (fine localization step). In this stage, one of
the descriptors
~
d
test
is compared with the descriptors
D
c
i
= {
~
d
c
i
,1
,
~
d
c
i
,2
,...,
~
d
c
i
,N
i
} from the training dataset
which belong to the retrieved room c
i
and the most
similar descriptor
~
d
c
i
,k
is retained. Finally, the posi-
tion where the test image was captured is estimated
as the coordinates where im
c
i
,k
was captured.
4.2 The Freiburg Dataset
The images used in the present work were ob-
tained from the Freiburg dataset, which is in-
cluded in the COLD (COsy Localization Database)
database (Pronobis and Caputo, 2009). This dataset
contains omnidirectional images captured while the
robot traversed several paths within the environment.
A Robust CNN Training Approach to Address Hierarchical Localization with Omnidirectional Images
305

(a) (b)
(c) (d)
(e) (f)
(g) (h)
Figure 2: Example of data augmentation. (a) Original im-
age captured within the Freiburg environment. One ef-
fect is applied over each image: (b) blur effect, (c) ran-
dom rotation (d) reflection, (e) darkness, (f) brightness,
(g) Gaussian noise and (h) occlusion. The images con-
tained in this dataset can be downloaded from the web site
https://www.cas.kth.se/COLD/.
It includes several rooms such as corridors, personal
offices, printer areas, kitchens, bathrooms, etc. The
robot tackle the image capturing task under real op-
Distance calculation
= (
⃗
,
⃗
,
)
= 1,…,
⃗
CNN Classifier
Descriptors pre-selection
in room
Descriptors in
,1
·
·
·
,
(
,1
,
,1
)
⃗
,1
(
,
,
,
)
⃗
,
K = arg min( ⃗
)
=
,
=
,
⃗
= {
1
, … ,
}
Most likely
room
·
·
·
Figure 3: Hierarchical localization diagram. The test image
im
test
is introduced into the CNN. The most likely room
is retrieved c
i
and the holistic descriptor
~
d
test
is obtained
from one of the layers. A nearest neighbour search is done
with the descriptors from the training dataset included in
the retrieved room and the most similar descriptor (im
c
i
,k
) is
retained. The position of im
test
is estimated as the position
where im
c
i
,k
was captured.
erating conditions, that is, people that appear and dis-
appear from scenes, changes in the furniture, etc. We
use omnidirectional images that were captured in a
building of the Freiburg University under three il-
lumination conditions (cloudy days, sunny days and
nights). Therefore, with the aim of evaluating how
those changes affect the localization, we propose us-
ing some of the images captured on a cloudy day for
training. Furthermore, the total dataset of cloudy im-
ages is used to evaluate the localization error with-
out illumination changes. In addition, the datasets
captured during sunny days and at night are used to
evaluate the proposed localization approach under il-
lumination changes (brightness and darkness respec-
tively). Apart from the images, a ground truth is also
available. This is provided by a laser sensor and it is
used only to measure the localization error produced.
Concerning the capturing process, the information
was captured following a trajectory along with the
whole environment. Therefore, some images contain
blur effects and dynamic changes. Moreover, this en-
vironment presents the longest trajectory among all
the available environments and it also presents wide
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
306
windows and some glass walls that make the visual
localization task tougher. Hence, these issues provide
suitability to evaluate the method under real operating
conditions.
The images of the dataset were captured in 9 dif-
ferent rooms: a printer area, a kitchen, four offices,
a bathroom, a stair area and a long corridor that con-
nects the rooms. The cloudy dataset is downsampled
with the aim of obtaining a resultant dataset with a
distance of 20 cm between consecutive images. Af-
terward, the resultant dataset (training dataset) is used
to train the CNNs. To summarize, this work proposes
the use of a training dataset captured under cloudy
conditions and a distance of 20 cm between capture
points; a cloudy test dataset, a sunny test dataset and
a night test dataset with 519, 2778, 2231 and 2876
images respectively.
4.3 CNN Training
The room retrieval problem has been addressed as a
classification problem approach. That is, a deep learn-
ing model is re-trained with the objective of retrieving
the room where the input image was captured. Con-
cerning the hyperparameters optimization by means
of the Bayesian Optimization, five experiments have
been carried out. They consist of varying the training
dataset, the number of explored points the values of
the hyperparameters. The five tackled experiments to
train the CNN are as follows:
• Experiment 1: Training with the original dataset.
Hyperparamaters to optimize: Initial Learn Rate,
Momentum and L2 Regularization. In this exper-
iment, 30 combination of hyperparameters values
were carried out.
• Experiment 2: Training with the augmented
dataset and hyperparameters that were found as
optimal for experiment 1.
• Experiment 3: Training with the augmented
dataset and hyperparameters to optimize: Mo-
mentum. In this experiment, 8 combination of hy-
perparameters values were carried out.
• Experiment 4: Training with the augmented
dataset and hyperparameters to optimize: Initial
Learn Rate and Momentum. In this experiment, 8
combination of hyperparameters values were car-
ried out.
• Experiment 5: Training with the augmented
dataset and hyperparameters to optimize: Initial
Learn Rate and L2 Regularization. In this exper-
iment, 30 combination of hyperparameters values
were carried out.
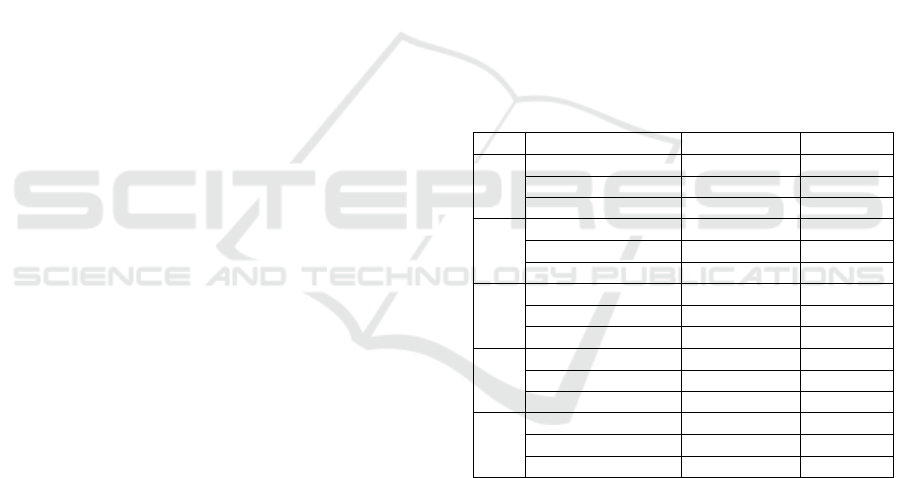
The optimization training is shown for experi-
ments 4 and 5 in the fig. 4. Concerning the tackled
experiments for training optimization, table 1 shows
the range of hyperparameters and the obtained opti-
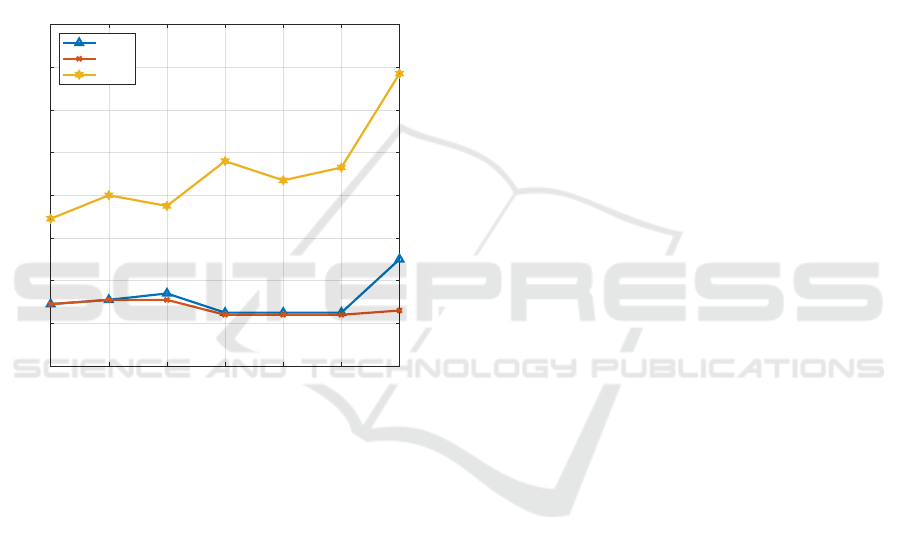
mal values for each experiment. In addition, the clas-
sification accuracy for the test images of the previous
experiments can be seen in the fig. 5.
As we can see, the best result for sunny condi-
tions is obtained in experiment 1, which is the only
one that does not use the data augmentation images.
As we have researched, it does not prove that data
augmentation does not work well with sunny condi-
tions in general. The CNN only performs mistakes in
a room where the sun’s beams pass through the win-
dows at an oblique angle. This fact in combination
with the effects of data augmentation, causes confu-
sion in the algorithm reducing the global accuracy.
For night and cloudy the best results are found in ex-
periment 2. Moreover, considering the three lighting
conditions, the best solution is presented for experi-
ment 3.
Table 1: Hyperparameters values for Bayesian optimiza-
tion.
Exp Hyperparameters Range Optimum
1
Initial Learn Rate [1e-4, 1] 0.006
Momentum [0.5, 1] 0.539
L2 Regularization [1e-10, 1e-2] 3.87e-9
2
Initial Learn Rate 0.006021 -
Momentum 0.53961 -
L2 Regularization 3.873e-9 -
3
Initial Learn Rate 1e-3 -
Momentum [0, 1] 0.911
L2 Regularization 1e-4 -
4
Initial Learn Rate [1e-5, 1e-2] 0.007
Momentum [0, 1] 0.384
L2 Regularization 1e-4 -
5
Initial Learn Rate 1e-3 -
Momentum [0, 1] 0.979
L2 Regularization [1e-5, 1e-3] 3.06e-4
4.4 Hierarchical Localization by using
Holistic Descriptors
As mentioned above, the localization method pro-
posed to address this task is based on a hierarchical
localization approach. This consists of using holis-
tic descriptors obtained from an intermediate layer of
the trained CNN. This localization is addressed in two
steps. The first step is the rough localization, which
consists of carrying out the room retrieval task by
means of the re-trained CNN. The second step is the
fine localization and it consists in estimating the cap-
turing position by using a nearest neighbour search
A Robust CNN Training Approach to Address Hierarchical Localization with Omnidirectional Images
307

(a)
(b)
Figure 4: Optimization training for experiments 4 and 5.
method using holistic descriptors. Among the dif-
ferent intermediate layers, we have decided to study
the fully connected layers 6 and 7, since they pre-
sented more robustness against changes of illumina-
tion. Moreover, in general, using the f c
6
layer leads
to better results than using f c
7
.
Therefore, the considered hierarchical localization
approaches are as follows:
1. CNN
0
+ f c
6
: (rough step) A CNN whose training
was not optimized (default hyperparameters were
selected) and (fine step) using the layer f c
6
to ob-
tain holistic descriptors.
2. CNN
0
+ f c
7
: (rough step) A CNN whose training
was not optimized (default hyperparameters were
Room retrieval accuracy
1 2 3 4 5
Experiment
80
85
90
95
100
Success ratio (%)
cloudy
night
sunny
Figure 5: The success ratio (room retrieval) of the CNN
trained by means of Bayesian optimization. Results ob-
tained under cloudy (blue), night (red) and sunny (yellow)
illumination conditions.
selected) and (fine step) using the layer f c
7
to ob-
tain holistic descriptors.
3. CNN
1
+ f c
6
: (rough step) CNN with training op-
timization associated to experiment 1 (see subsec-
tion 4.3) and (fine step) using the layer f c
6
to ob-
tain holistic descriptors.
4. CNN
2
+ f c
6
: (rough step) CNN with training op-
timization associated to experiment 2 (see subsec-
tion 4.3) and (fine step) using the layer f c
6
to ob-
tain holistic descriptors.
5. CNN
3
+ f c
6
: (rough step) CNN with training op-
timization associated to experiment 3 (see subsec-
tion 4.3) and (fine step) using the layer f c
6
to ob-
tain holistic descriptors.
6. CNN
4
+ f c
6
: (rough step) CNN with training op-
timization associated to experiment 4 (see subsec-
tion 4.3) and (fine step) using the layer f c
6
to ob-
tain holistic descriptors.
7. CNN
5
+ f c
6
: (rough step) CNN with training op-
timization associated to experiment 5 (see subsec-
tion 4.3) and (fine step) using the layer f c
6
to ob-
tain holistic descriptors.
The localization error is measured as the eu-
clidean distance between the estimated position and
the current position (given by the ground truth of the
dataset). Moreover, the localization error is evaluated
against different illumination conditions. Since the
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
308
objective is to study the robustness of the proposed
method against illumination changes in the environ-
ment of work. Obtained results are shown in the fig. 6.
In general, the localization error is related to the
success rate. That is, when the CNN is more capable
of retrieving successfully the images, the localization
error is lower. Furthermore, the worst localization er-
ror under sunny illumination conditions is found in
the CNN associated with training 5, which presented
the lowest success ratio among all the tackled train-
ing processes. Regarding the best values for cloudy
and night, they are given in CNN
2
,CNN
3
and CNN
4
,
whose training was based on the Bayesian optimiza-
tion.
0 + fc6 0 + fc7 1 + fc6 2 + fc6 3 +fc6 4 + fc6 5 + fc6
CNN + layer
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Localization error (m)
Hierarchical localization
cloudy
night
sunny
Figure 6: Hierarchical localization results. Seven combi-
nations of CNN and its associated intermediate layer are
evaluated to address the localization task in a hierarchical
way. Results presented under cloudy (blue), night (red) and
sunny (yellow) illumination conditions. The average local-
ization error was calculated by using 2778 (cloudy), 2231
(night) and 2876 (sunny) robot positions.
5 CONCLUSIONS
In this work, we have evaluated the use of a deep
learning technique to build hierarchical topological
models for localization. The developed tool consists
of a convolutional neural network trained with om-
nidirectional images for addressing a room retrieval
task. Moreover, the re-trained CNN is also proposed
to obtain holistic descriptors from intermediate lay-
ers with the aim of obtaining information that char-
acterizes the input image. Therefore, throughout the
present work, we have evaluated the use of two tech-
niques to improve the training process of the CNN
and the use of the network to solve the localization by
means of a method based on a hierarchical localiza-
tion approach.
As for the training optimization process, Bayesian
optimization is capable of improving the training pro-
cess of the CNN in general, since the average suc-
cess rate increases when this approach is considered.
Furthermore, data augmentation also leads to obtain
CNNs that perform better results. Concerning the
outputs obtained under night illumination conditions,
they have been considerably improved. Since they
lead to reach a similar success ratio than those per-
formances that do not consider illumination changes
(i.e., under cloudy conditions). However, perfor-
mance is not considerably improved when the sunny
illumination condition is evaluated. After a profound
analysis, we reached the conclusion that this increase
of mistakes is due to the fact that room number 1
(printer area) is severely affected by the beams of
light since the orientation of the windows is north.
This fact, together with the effects of data augmen-
tation, causes confusion during the training process
and, hence, reduces global accuracy.
Regarding the training of a pre-trained CNN, this
presents good results to carry out a room retrieval task
departing from omnidirectional images. This result
presents a novelty in the field, since, until now, scarce
works had proposed a deep learning model based on
omnidirectional images for localization purposes. In
addition, the intermediate layers also are capable of
providing vectors of information that can be used to
obtain global-appearance descriptors.
Therefore, a hierarchical localization approach is
addressed by using the CNN to retrieve the room and
also to obtain holistic descriptors. This method has
been evaluated and has demonstrated to be suitable to
address the localization task. Obtained results show
that the localization error is considerably low under
cloudy and night conditions since the minimum er-
ror obtained is 25 cm and the considered environ-
ment presents an average distance between images of
around 20 cm. As for the sunny illumination condi-
tions, the localization error is higher, due especially to
the lower success rate, given by the beams of light in
the printer area. On the contrary, the effects produced
by darkness have been completely reduced, since the
localization error associated with the night illumina-
tion condition is equal to the ones obtained without
illumination changes.
In future works, we will focus on reducing the lo-
calization error under sunny illumination conditions.
Furthermore, we will extend the use of deep learn-
ing techniques for localization by using different tools
such as autoencoders or LSTM networks. Last, we
A Robust CNN Training Approach to Address Hierarchical Localization with Omnidirectional Images
309

would also like to create and evaluate localization ap-
proaches based on CNNs in outdoor environments.
ACKNOWLEDGEMENTS
This work has been supported by the General-
itat Valenciana and the FSE through the grant
ACIF/2020/141 and the project AICO/2019/031:
“Creaci
´
on de modelos jer
´
arquicos y localizaci
´
on ro-
busta de robots m
´
oviles en entornos sociales”; and
by the Spanish government through the project DPI
2016-78361-R (AEI/FEDER, UE): “Creaci
´
on de ma-
pas mediante m
´
etodos de apariencia visual para la
navegaci
´
on de robots”.
REFERENCES
Arroyo, R., Alcantarilla, P. F., Bergasa, L. M., and Romera,
E. (2016). Fusion and binarization of cnn features
for robust topological localization across seasons. In
2016 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 4656–4663.
Bergstra, J. and Bengio, Y. (2012). Random search for
hyper-parameter optimization. Journal of machine
learning research, 13(Feb):281–305.
Bergstra, J., Yamins, D., and Cox, D. D. (2013). Mak-
ing a science of model search: Hyperparameter op-
timization in hundreds of dimensions for vision archi-
tectures.
Cebollada, S., Pay
´
a, L., Flores, M., Peidr
´
o, A., and Reinoso,
O. (2021). A state-of-the-art review on mobile
robotics tasks using artificial intelligence and visual
data. Expert Systems with Applications, 167:114195.
Cebollada, S., Pay
´
a, L., Flores, M., Rom
´
an, V., Peidr
´
o,
A., and Reinoso, O. (2020). A deep learning tool
to solve localization in mobile autonomous robotics.
In ICINCO 2020, 17th International Conference on
Informatics in Control, Automation and Robotics
(Lieusaint-Paris, France, 7-9 July, 2020). Ed. IN-
STICC.
Cebollada, S., Pay
´
a, L., Rom
´
an, V., and Reinoso, O. (2019).
Hierarchical localization in topological models under
varying illumination using holistic visual descriptors.
IEEE Access, 7:49580–49595.
Chaves, D., Ruiz-Sarmiento, J., Petkov, N., and Gonzalez-
Jimenez, J. (2019). Integration of cnn into a robotic
architecture to build semantic maps of indoor environ-
ments. In International Work-Conference on Artificial
Neural Networks, pages 313–324. Springer.
Ding, J., Chen, B., Liu, H., and Huang, M. (2016). Con-
volutional neural network with data augmentation for
sar target recognition. IEEE Geoscience and remote
sensing letters, 13(3):364–368.
Domhan, T., Springenberg, J. T., and Hutter, F. (2015).
Speeding up automatic hyperparameter optimization
of deep neural networks by extrapolation of learning
curves. In Twenty-Fourth International Joint Confer-
ence on Artificial Intelligence.
Dymczyk, M., Gilitschenski, I., Nieto, J., Lynen, S., Zeisl,
B., and Siegwart, R. (2018). Landmarkboost: Effi-
cient visualcontext classifiers for robust localization.
In 2018 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems (IROS), pages 677–684.
Falkner, S., Klein, A., and Hutter, F. (2018). Bohb: Robust
and efficient hyperparameter optimization at scale.
arXiv preprint arXiv:1807.01774.
Feurer, M. and Hutter, F. (2019). Hyperparameter optimiza-
tion. In Automated Machine Learning, pages 3–33.
Springer.
Han, D., Liu, Q., and Fan, W. (2018). A new image clas-
sification method using cnn transfer learning and web
data augmentation. Expert Systems with Applications,
95:43–56.
Kotthoff, L., Thornton, C., Hoos, H. H., Hutter, F., and
Leyton-Brown, K. (2019). Auto-weka: Automatic
model selection and hyperparameter optimization in.
Automated Machine Learning: Methods, Systems,
Challenges, page 81.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Levine, S., Pastor, P., Krizhevsky, A., Ibarz, J., and Quillen,
D. (2018). Learning hand-eye coordination for robotic
grasping with deep learning and large-scale data col-
lection. The International Journal of Robotics Re-
search, 37(4-5):421–436.
Pay
´
a, L., Peidr
´
o, A., Amor
´
os, F., Valiente, D., and Reinoso,
O. (2018). Modeling environments hierarchically with
omnidirectional imaging and global-appearance de-
scriptors. Remote Sensing, 10(4):522.
Pronobis, A. and Caputo, B. (2009). COLD: COsy Lo-
calization Database. The International Journal of
Robotics Research (IJRR), 28(5):588–594.
Salamon, J. and Bello, J. P. (2017). Deep convolutional neu-
ral networks and data augmentation for environmental
sound classification. IEEE Signal Processing Letters,
24(3):279–283.
Shvets, A. A., Rakhlin, A., Kalinin, A. A., and Iglovikov,
V. I. (2018). Automatic instrument segmentation
in robot-assisted surgery using deep learning. In
2018 17th IEEE International Conference on Machine
Learning and Applications (ICMLA), pages 624–628.
Sinha, H., Patrikar, J., Dhekane, E. G., Pandey, G., and
Kothari, M. (2018). Convolutional neural network
based sensors for mobile robot relocalization. In 2018
23rd International Conference on Methods Models in
Automation Robotics (MMAR), pages 774–779.
Snoek, J., Rippel, O., Swersky, K., Kiros, R., Satish, N.,
Sundaram, N., Patwary, M., Prabhat, M., and Adams,
R. (2015). Scalable bayesian optimization using deep
neural networks. In International conference on ma-
chine learning, pages 2171–2180.
Wozniak, P., Afrisal, H., Esparza, R. G., and Kwolek, B.
(2018). Scene recognition for indoor localization of
mobile robots using deep cnn. In International Con-
ference on Computer Vision and Graphics, pages 137–
147. Springer.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
310
