
Design and Development of a Dexterous Master Glove
for Nuclear Waste Telemanipulation
Florian Gosselin
a
, Mathieu Grossard, Djibril Diallo, Benoit Perochon and Pascal Chambaud
Université Paris-Saclay, CEA, LIST, F-91120 Palaiseau, France
Keywords: Force Feedback, Dexterous Interface, Telemanipulation.
Abstract: The rise of the nuclear industry in middle of the last century required the development of remotely controlled
robotic solutions. Researches on radioactivity and its applications were initially performed in gloveboxes and
hot cells with which operators can efficiently and safely access dangerous materials at distance using
telemanipulators. Owing to the relatively limited variety of the objects used in such environments, and to the
fact that they can usually be adapted for remote manipulation, it was possible to efficiently grasp them using
purely mechanical or robotic 6 degrees of freedom (DoF) master-slave systems equipped with bi-digital
grippers on the slave side and simple handles on the master side. Such solutions, which were perfectly adapted
for handling a limited quantity and variety of radioactive material, are however no more sufficient when
processing huge quantities of nuclear waste accumulated over time and/or produced at the occasion of
dismantling operations occurring decades later at the end of the nuclear power plants lifecycle. The quantity
and diversity of nuclear waste require more efficient and versatile systems. To answer this challenge and
increase the operators’ productivity, we developed a novel dexterous master-slave system composed of a tri-
digital master glove and a remotely controlled three fingers dexterous gripper. This paper presents the design
and development of this master hand device. We first introduce its design rationale, then we present its electro-
mechanical design, with details on the kinematics, actuators, sensors and controller, and finally its integration
in a master-slave system which is used to validate its ability to perform dexterous telemanipulation.
1 INTRODUCTION
The rise of the nuclear industry in the middle of the
twentieth century required the development of
efficient processes allowing to exploit its
extraordinary power for both military applications
and for the production of electricity. Owing to the
health hazard associated with radioactivity, it was not
possible to take irradiated materials in hands as in
other industries. It was of critical importance to
develop technological solutions allowing to remotely
grasp and manipulate radioactive objects without
exposing operators to danger. The solution found by
researchers and engineers was to use gloveboxes and
hot cells with which operators can access dangerous
materials safely at distance using remote
manipulation means, among which telemanipulators
are the most advanced and efficient solutions. Thanks
to the relatively limited variety of the to-be-grasped
objects, it was possible to adapt them for remote
manipulation, and 6 DoF master-slave systems
a
https://orcid.org/0000-0003-3412-8144
equipped with bi-digital grippers on the slave side and
simple handles on the master side were sufficient for
these pioneering activities. Indeed, various
telemanipulators, being either purely mechanical
systems of robotic devices, were developed and used
in nuclear installations (Köhler, 1981; Vertut, 1984).
Such systems, especially those benefiting from
computer assisted telemanipulation functions, prove
to be very efficient and are still in use today, for
example in the recycling plant of La Hague in France
(Piolain et al., 2010; Geffard et al., 2012).
Such solutions, which were perfectly adapted for
handling a limited quantity and variety of radioactive
material, are however no more sufficient when
dealing with dismantling operations required decades
later at the end of the nuclear power plants lifecycle,
or for processing the huge quantity of waste
accumulated over the years of exploitation of these
installations. The quantity and diversity of nuclear
waste materials require more efficient and versatile
systems. This was precisely the objective of the
Gosselin, F., Grossard, M., Diallo, D., Perochon, B. and Chambaud, P.
Design and Development of a Dexterous Master Glove for Nuclear Waste Telemanipulation.
DOI: 10.5220/0010577204590468
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 459-468
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
459

RoMaNS (i.e. Robotic Manipulation for Nuclear Sort
and Segregation) project, financed by the European
Horizon 2020 research program, to advance the state
of the art in telemanipulation and develop novel
solutions to solve the challenging and safety-critical
industrial problem of sorting and segregating such
irradiated material (ROMANS, 2015) (WNN, 2015)
(Marturi, 2016). To better understand the problem, it
can be recalled that in the sole UK for example,
intermediate level waste amount to about 1.4 million
cubic meters, part of this legacy nuclear waste being
very old (first nuclear operations date back to the
1940s) and poorly characterized. Indeed, in many
older nuclear sites, waste of mixed contamination
levels are put together in several thousands of storage
containers, some with even unknown contents. It is
now time to clean up this waste stock and develop a
more sustainable solution to store them. Therefore, it
is of primary economic importance to put each waste
item in an adequate container. Low level waste in
particular must be placed in low-level storage
containers, rather than occupying extremely
expensive and resource intensive high-level storage
containers and facilities. This sorting process requires
opening thousands of legacy waste containers,
extracting their potentially very various contents
(pieces of fuel rod casing, contaminated tools and
rubble, irradiated suits, rubber gloves, etc.), and
sorting and segregating the most highly contaminated
objects. This process can only be performed using
remotely controlled robots due to the high radiation
levels of some waste material, and state-of-the-art
simple 6 DoF teleoperated robots are not a viable
solution therefore in the longterm. Indeed, being
equipped with simple bi-digital grippers, they are not
adapted to grasp all kinds of objects being present in
the containers. One of the aim of the ROMANS
project, along with mixed autonomy solutions
allowing to increase operators’ productivity, was to
develop more dexterous and versatile
telemanipulation means. As will be presented below,
both a new three fingers slave hand and a novel tri-
digital input device, object of this article, were
designed to answer this challenge.
Fortunately, despite there were relatively few
advancements in dexterous teleoperation in the
nuclear industry in the last decades, huge progress has
been obtained in the meantime in dexterous force
feedback robotics and VR haptics. The requirement
for anthropomorphic devices able to assist humans in
force demanding applications (e.g. military, civil
security, firemen, and even industry) or to restore lost
motor abilities (e.g. rehabilitation, disabled people
assistance), as well as the rise of Virtual Reality
applications, led to the development of numerous arm
and hand orthoses, exoskeletons and master devices
(Bogue, 2009) (Foumashi et al., 2011) (Heo et al.,
2012) (Gopura et al., 2016) (Perret and Van der
Poorten, 2018).
The lessons learnt from these works were taken
into account for the development of the tri-digital
hand master device presented in this article. Section 2
introduces its specifications, sections 3 and 4 present
its design and implementation, and section 5
concludes this paper.
2 SPECIFICATIONS
2.1 Teleoperation Set-up
2.1.1 Controlled Slave Robot
To cope with the aforementioned challenge, a novel
reconfigurable and underactuated robotic hand was
developed. As shown in Figure 1, this hand is
composed of three fingers with similar kinematics.
Each finger is composed of two phalanges and has
two DoFs in flexion. This mechanism is
underactuated, with only one actuator controlling the
two flexion DoFs. Coupling rods and springs allow to
passively adapt to the grasped objects’ geometry as
proposed in (Birglen and Gosselin, 2004) and
(Birglen et al., 2008). The distal phalanges are
covered with a soft polymeric envelope in order to
increase grasping robustness when an object is held
in hand, and a sharp end is provided in order to allow
for precision grasps. An additional abduction-
adduction DoF allows jointly reconfiguring the two
fingers that appear the closest in Figure 1. In extreme
configurations, these fingers point towards each
other, or towards the third and fixed finger, with
intermediate configurations favouring circular and
spherical grasps as shown in Figure 1.
Figure 1: CEA LIST’s three fingers slave hand.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
460

Such a three fingers design proves to be sufficient
for coarse gripping and manipulating the to-be-sorted
objects, yet it remains simple and rugged when
compared to five-fingers hands which would be too
fragile for such harsh environment. As shown in
Figure 2, it can generate power, intermediate and
precision grasp patterns (Feix et al., 2009), and it is
capable of grasping a large variety of objects similar
in size and weight to those encountered in nuclear
waste containers. It was mounted on a large capacity
slave robot (ABB IRB 2600, see Figure3).
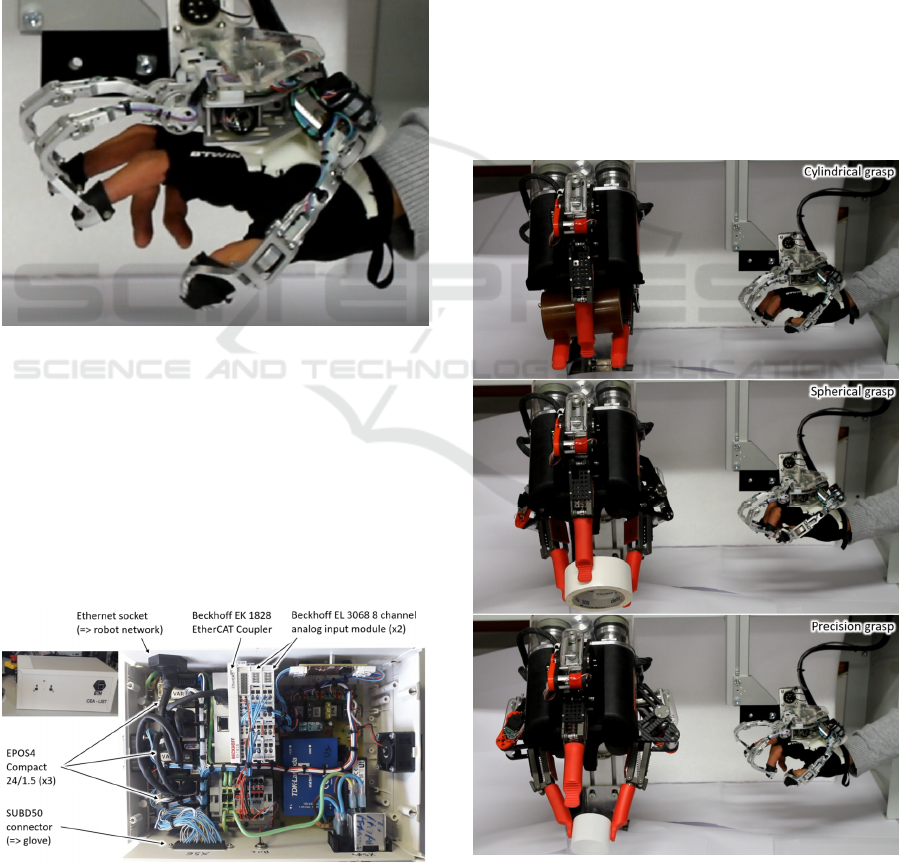
Figure 2: Illustration of the possible grasps of the CEA
LIST’s three fingers slave hand.
Figure 3: Example set-up on the slave side.
It is worth noting that to efficiently perform
dexterous operations, the human being often makes
use of both hands. This configuration allows some
level of parallelization, and most importantly to
concurrently perform complementary operations (e.g.
holding a container with one hand and opening the lid
with the second hand, opening a container and
grasping an object inside it, grasping an object and
making an operation on it, etc.). This configuration
was used here, with one robot carrying a simple
gripper used for rough operations, and the second one
equipped with the three fingers gripper allowing to
perform dexterous operations.
2.1.2 Master Console
To allow for an intuitive and efficient control of a bi-
manual teleoperation set-up like the one presented
above, a master console equipped with two input
devices is required. A usual 6 DoF master arm (like
for example the Virtuose 6D TAO from Haption
shown on the left side of the figure below) is
sufficient to control the first robot. It is however not
the case for the control of the second arm equipped
with the three fingers gripper. As shown in Figure 4,
a more advanced solution is required, allowing fine
control of the dexterous gripper and force feedback
on both the palm and fingers. To do so, we developed
a novel dexterous hand master whose design drivers
are presented below.
Figure 4: Master slave setup equipped with bi-digital and
three fingers grippers.
2.2 Design Drivers of the Dexterous
Hand Master
The following criteria were considered for the
specification of our dexterous hand master:
1/ Dexterous manipulation: in order to control a
three fingers slave hand, the most logical solution is
to use a tri-digital hand master. A more general study
of manual interactions shows that this is also an
interesting compromise between manipulation
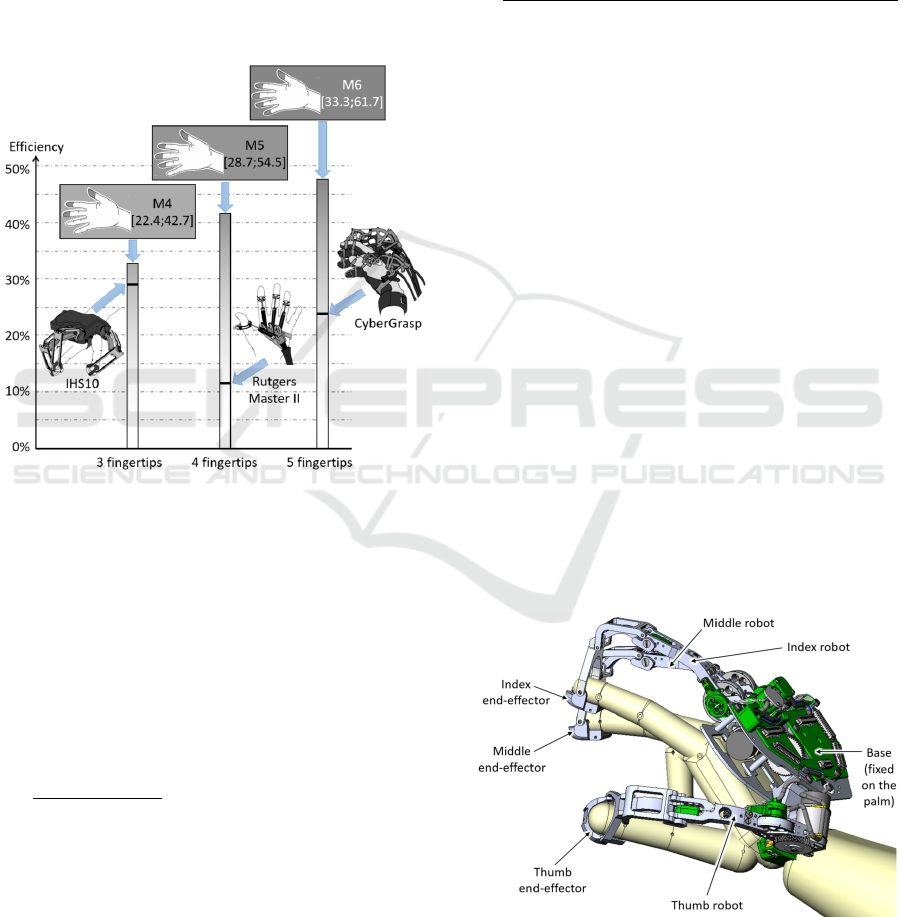
capabilities and complexity (Gonzalez et al., 2014).
As illustrated in Figure 5, the percentage of our daily
life rendered possible when using three, respectively
four or five fingertips (patterns M4, resp. M5 and M6)
is between 22.4 and 42.7%, resp. 28.7 and 54.5% and
33.3 and 61.7% depending on the type of activities
performed (rough manipulation, fine manipulation or
manual exploration of the environment). Using more
fingers naturally allows reaching higher scores in
theory. However, when considering the use of master
input devices to perform such actions, this is not
necessarily the case in practice. Indeed, increasing the
number of fingers the input device can track and
Design and Development of a Dexterous Master Glove for Nuclear Waste Telemanipulation
461
apply force feedback on requires a higher number of
DoFs, more links, joints and actuators. This added
complexity tends to reduce the range of motion of the
fingers, limit the force and stiffness available on each
finger, increase friction and inertia, and globally limit
the real efficiency. As an example, it appears that the
three fingers IHS10 glove (Gosselin, 2012) is more
efficient than the four fingers Rutgers Master II
(Bouzit et al., 2002) or the five fingers Cybergrasp
(Aiple et Schiele, 2013) when taking into account the
limitations of the fingers motion, the force capacity
and the stiffness along with the number of fingers.
Figure 5: Comparative study of the interaction efficiency of
some existing three, four and five fingers input devices
(adapted from (Gonzalez et al., 2014)).
As a consequence, we will make use here of a
three fingers device. As shown in Figure 4, this device
will be mounted at the tip of a Virtuose 6D and
attached to the palm, in order to allow for haptic
feedback on both the palm and fingertips. This
solution has the additional advantage of allowing to
compensate the weight of the glove, rendering its use
totally transparent for the user who has not to carry its
weight on the hand.
2/ Universal fit: as explained in (Gosselin et al.,
2020), two types of dexterous interfaces can be found
in the literature. Exoskeletons have links and joints
similar to the hand, and they are attached to every
phalanges on which they can independently apply
forces. They allow simulating both precision and
power grasps, at the price however of hard
mechanical constraints as their joints have to be
roughly aligned with the fingers’ ones. Hence, they
must be tuned to each user, which is not convenient
for a universal device that can be used by different
operators. On the contrary, fingertip interfaces are
fixed only on the palm and distal phalanges, and their
geometry is less restricted, making them easily usable
by different users. Their design is also much simpler.
These advantages led us to focus on fingertip devices.
To allow for natural interactions with the palm and
fingers, links and joints have to be positioned and
dimensioned so that the robot does not limit the
fingers’ movements.
3/ High transparency and force feedback quality:
haptic interfaces should be transparent in free space,
i.e. display a mechanical impedance that is
sufficiently low for the user to forget their presence.
They should also be able to provide high impedances
to simulate realistic contacts with stiff surfaces. This
contradiction usually leads to a compromise between
a high transparency in free space (i.e. low friction and
inertia) and realistic force feedback in contact (i.e.
high forces and stiffness). Here, we will exploit the
fact that the slave hand has only one actuator per
finger to control it with a glove having also only one
actuator per finger, allowing to greatly simplify the
design and favour a high transparency.
3 ELECTRO-MECHANICAL
DESIGN
3.1 Overview of the System
The tri-digital master glove is illustrated on Figure 6.
It is composed of a base plate fixed on the palm and
3 robots attached to the distal phalanx of the thumb,
index and middle finger, allowing to track and apply
forces on these fingers.
Figure 6: Overview of the tri-digital master glove.
This design was inspired by the dexterous
interface with hybrid haptic feedback for Virtual
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
462
Reality applications presented in (Gosselin et al.,
2020). It was adapted to our requirements (3 fingers
with one DoF force feedback each) and improved
(novel sensors and simplified end-effectors).
The base is dimensioned so that the index and
middle robots’ and fingers’ abduction-adduction axes
are as close as possible (they are theoretically aligned
for an adult man corresponding to the 50
th
percentile
of the population).
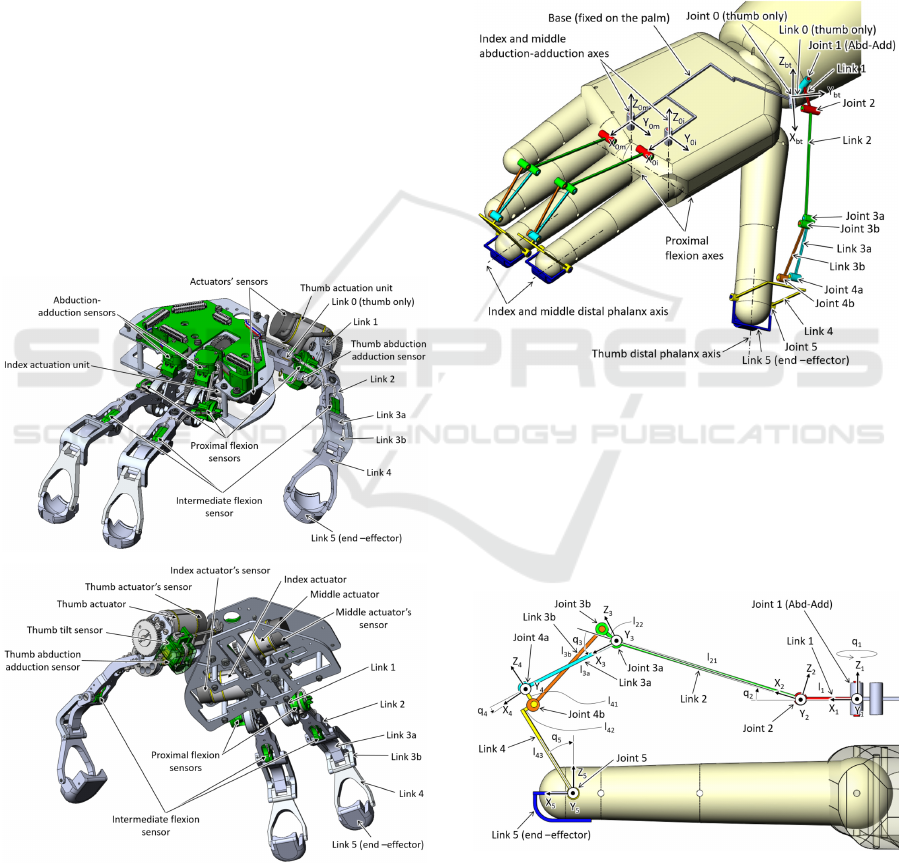
As shown on Figure 7, each robot is composed of
6 links (7 for the thumb, owing the requirement to
make thumb opposition), allowing to move the
fingers freely in their entire workspace. Joint sensors
are integrated in the abduction-adduction, proximal
flexion and intermediate flexion axes, as well as on
the tilt axis of the thumb, allowing to compute the
end-effectors’ positions in space. Each robot is
provided with a single actuation unit enabling torque
feedback on the proximal flexion axis, hence force
feedback at the fingertips roughly normal to the finger
pulp. These actuators are equipped with high
resolution incremental encoders, ensuring high
quality position control.
Figure 7: Main components of the master glove (top and
bottom views).
3.2 Kinematics
The simplified kinematic model of the master glove
is illustrated in Figure 8. Link 1 allows abduction-
adduction while the other links allow finger flexion-
extension. The links 2, 3a, 3b and 4 form an inverted
parallelogram which allows the robot to remain close
to the finger in its entire workspace. A pivot joint is
added at the end of this structure to allow for the
fingertip to rotate freely when the operator closes the
hand.
Figure 8: Kinematic model of the master glove
(R
bt
(O
bt
,X
bt
,Y
bt
,Z
bt
), resp. R
0i
=(O
0i
,X
0i
,Y
0i
,Z
0i
) and
R
0m
=(O
0m
,X
0m
,Y
0m
,Z
0m
) are the base frames of the thumb,
index and middle fingers).
The kinematic structure of the index and middle
fingers’ robots is illustrated in Figure 9
(corresponding to links 1 to 5, an additional joint
being added between links 0 and 1 for the thumb).
Figure 9: Kinematic model of the robots. A frame
R
i
=(O
i
,X
i
,Y
i
,Z
i
) is associated with each link, with its origin
positioned on the joint axis, q
i
is the rotation around joint i,
and l
i
(resp. l
i1
, l
i2
) designates the length of link i (resp. of
different parts of link i).
Design and Development of a Dexterous Master Glove for Nuclear Waste Telemanipulation
463
With these notations, the kinematic model of the
index and middle robots can be written as follows:
T
01
=trans(X
0
,d
x
).trans(Y
0
,d
y
).rot(Z
0
,q
1
) (1)
T
12
=trans(X
1
,l
1
).rot(Y
1
,q
2
) (2)
T
23
=trans(X
2
,l
21
).rot(Y
2
,q
3
) (3)
T
34
=trans(X
3
,l
3a
).rot(Y
3
,q
4
) (4)
T
45
=trans(Z
4
,-l
41
-l
43
).trans(X
4
,l
42
).rot(Y
4
,q
5
) (5)
Another transformation is required for the thumb.
Equation (1) is then replaced with the following
equations:
T
b0
=trans(X
0
,d
x
).trans(Y
0
,d
y
).
trans(Z
0
,d
z
).rot(Z
0
,q
zb0
).rot(X
b
,q
xb0
)
(6)
T
01
=trans(Z
0
,l
0
).rot(Z
0
,q
1
) (7)
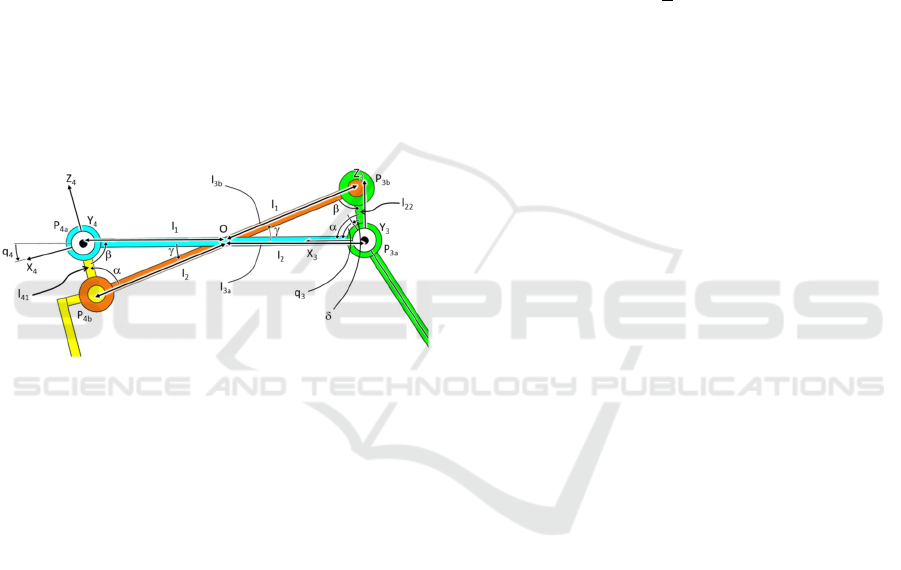
To solve the equations of the inverted
parallelogram, we use the notations illustrated in
Figure 10 (Ngalé Haulin et al., 2001).
Figure 10: Inverted parallelogram.
Denoting δ the (fixed) angle between the different
parts of link 2 with length l
21
and l
22
, we first write:
α = q
3
+ δ
(8)
Then we use the sine formula in the triangle
OP
3a
P
3b
, with O the point where links 3a and 3b cross,
l
1
the distance between O and P
3b
or P
4a
, and l
2
the
distance between O and P
4b
or P
3a
(here, the
dimensions were chosen so that l
3a
= l
3b
and l
22
= l
41
,
hence the links 2 and 4 move in symmetry).
sin(α)/l
1
= sin(β)/l
2
= sin(γ)/l
22
(9)
Owing that l
3a
= l
3b
= l
1
+l
2
, we can write:
(l
3a
-l
1
).sin(α) = l
1
.sin(β)
(10)
l
1
= l
3a
.sin(α)/(sin(α)+sin(β))
(11)
Using equation (9), we get:
(sin(α)+sin(β))/l
3a
= sin(γ)/l
22
=
sin(π-α-β)/l
22
= sin(α+β)/l
22
=
(sin(α).cos(β)+cos(α).sin(β))/l
22
(12)
By denoting t = tan(β/2), we get:
(l
22
/l
3a
).(sin(α)+2t/(1+t
2
)) =
(sin(α).(1-t
2
)/(1+t
2
)+cos(α).2t/(1+t
2
))
(13)
Equation (13) can be rewritten as a second order
polynomial function of t as follows:
[(1+l
22
/l
3a
).sin(α)].t
2
+[2.(l
22
/l
3a
-cos(α))].t
+(l
22
/l
3a
-1).sin(α) = 0
(14)
Hence we finally get:
Δ = (l
22
/l
3a
-cos(α))
2
-((l
22
/l
3a
)
2
-1).sin
2
(α)
(15)
t = (cos(α)-l
22
/l
3a
+
√
∆) / (1+l
22
/l
3a
).sin(α)
(16)
β = 2.tan
-1
(t)
(17)
q
4
= π/2-β
(18)
These equations allow computing q
4
from q
3
(using equation (8) to compute α from q
3
). The
position of the fingertip can then be computed from
q
1
, q
2
, q
3
and q
4
.
The design of the base plate, links dimensions and
joints’ range of motion were optimized in order to
allow free movements of the fingers over their entire
workspace. It is worth mentioning that, unlike gloves
and exoskeletons whose dimensions fit specific users,
fingertip devices can accommodate different hand
sizes. Our device can therefore easily be used by
various users.
3.3 Actuation Units
As shown in Figure 11, force feedback is obtained
with a Maxon REmax21 221028 DC motor (12V,
continuous torque 6.07mNm, peak torque 17.3mNm
(Maxon, 2016)) associated with a two stages reducer
combining:
• a gear reducer with Delrin gears of 0.5 modulus
allowing to obtain a reduction ratio of 5 (10 teeth
primary gear HPC ZG0.5-10 glued on the motor
axis, 50 teeth secondary gear HPC ZG0.5-50 as
output),
• a miniature cable capstan reducer making use of a
Berkley Whiplash Pro 0.42mm Dyneema cable
attached to pulleys of diameter 2.3mm and
25.9mm, hence a ratio of 11.26.
Such combination is highly transparent and
backdriveable, yet compact and light. It ensures that,
even if backlash occurs in the gear reducer, its
amplitude is downscaled at the output of the cable
capstan reducer, making if almost negligible in
practice. It allows generating a continuous joint
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
464
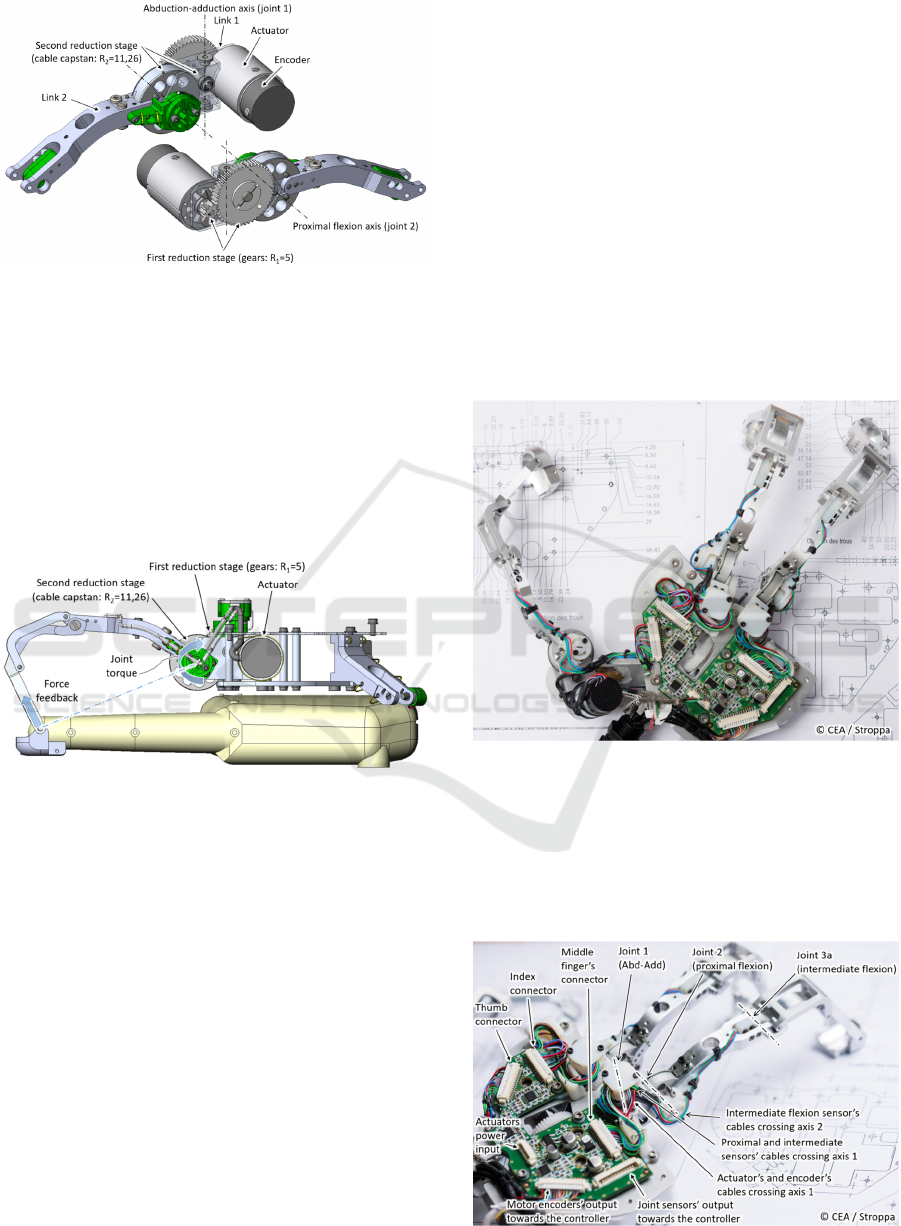
Figure 11: Actuation units.
torque equal to 0.342Nm and a peak joint torque of
0.974Nm on the proximal flexion joint.
As shown in Figure 12, the joint torque generates
a force on the distal phalanx whose amplitude and
direction depend on the finger configuration. Force is
almost normal to the pulp when the finger is straight.
The distance between the actuated axis and the
fingertip being about 78.8mm in this configuration
for an adult man of medium size, continuous force is
equal to 4.3N and peak force to 12.4N.
Figure 12: Force feedback generated on fingertips.
3.4 Sensors
The motors are equipped with 512ppt magneto-
optical encoders (ref. Maxon MR 201940). A
resolution of 2048ppt is obtained after interpolation.
Hall effect sensors with a resolution of 1024ppt
are added at the joint level on the abduction-
adduction axis and on the proximal and intermediate
flexion axes (ref. sensors RLS RM08 VB 00 10 B02
L2 G00, ref. magnets RMM44 A3 A00).
One can notice that the measurement of the
proximal flexion is redundant. It is worth noting that
both sensors are however not used for the same
purposes.
• Owing the reduction ratio, the motor encoders
give a very precise information, and they are co-
located with the actuators. They are used for the
position and force control (master and slave
hands are linked using a bilateral position
coupling scheme). However, these sensors do not
allow to know the system configuration at start-
up (these sensors are incremental).
• The role of the joint sensors is precisely to give
an absolute joint angle value, avoiding the need
for initialization when the glove is turned on.
4 MANUFACTURING AND
INTEGRATION
4.1 Dexterous Hand Master Prototype
Figures 13 below shows the manufactured prototype
made of aluminium parts.
Figure 13: Internal view of the manufactured prototype of
tri-digital dexterous hand master.
As shown on Figure 14, a special care was given
to the actuators and sensors cables routing. Cables are
guided along the robots’ structure so that they cross
the joints’ axes. This way, they resist as less as
possible to links’ movements.
Figure 14: Dexterous hand master internal cabling.
Design and Development of a Dexterous Master Glove for Nuclear Waste Telemanipulation
465
A custom designed PCB, integrated in the base
plate, is used to connect the glove to its controller.
This PCB is in charge of both powering the sensors
and actuators and of conditioning and filtering the
sensors’ signals. In order to favor modularity, each
finger is connected to this PCB through a specific
connector on the robots’ side, and three connectors
are used on the controller side, respectively in charge
of the actuators power supply, motors’ encoders and
joint sensors.
As shown on Figure 15, this PCB is protected by
a thin plastic sheet, and the base is attached to a mitten
through a custom 3D printed part. This way, the glove
can be easily put on or taken off.
Figure 15: Fully integrated dexterous master glove.
4.2 Controller
The haptic master glove is controlled using an
Ethercat controller illustrated in Figure 16. Three
Maxon EPOS4 Compact 24/1.5 modules are used for
controlling the actuators, while a Beckhoff EK1828
Ethercat Coupler connected to two Beckhoff EL 3068
analog input modules with 8 channels each (0-10V,
12 bits) is used to connect the joint sensors. The
Figure 16: Dexterous hand master controller.
controller also integrates 12V (for the EPOS4
modules) and 24V (for the Beckhoff modules and the
glove PCB) power supplies. It is connected to the
glove through a SUBD 50 connector and to the robot
network through an Ethernet socket.
4.3 Master Glove-Slave Hand Coupling
To validate its ability to remotely control a dexterous
robot hand, our tri-digital hand master was coupled to
the three fingers robot hand presented in section 2.1.1
using the TAO framework (Geffard et al., 2010;
Geffard et al., 2012). TAO is a teleoperation
middleware allowing high-speed synchronization
between several real or virtual mechanisms (e.g.
master arms, slave arms, dynamic simulation engine).
It can control several robots synchronously, allowing
master-slave bilateral position coupling with force
feedback (control laws can be implemented either in
joint space or in Cartesian space). First tests consisted
in verifying that the slave hand can be controlled by
Figure 17: Dexterous teleoperation with force feedback
using the tri-digital hand master.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
466

moving the master glove, and reversely that the
master hand reproduces the slave hand’s motions.
Finally, the master glove was used to remotely grasp
various object with force feedback (see Figure 17).
4.4 Bi-manual Teleoperation
Once validated, the master hand glove was mounted
on a Haption Virtuose 6D master arm, in order to
allow controlling both a slave robot and the slave
hand. It was further associated with a second master
slave system as specified in section 2.1.2.
Figure 18: Bi-manual dexterous teleoperation.
First evaluations were essentially functional. We
tested the ability of the operator to grasp and
manipulate several types of objects similar to the waste
found in nuclear containers (e.g. piece of cloth, rigid
objects, cables, etc.). As shown in Figure 18 and Figure
19, these operations were successful. It was even
possible to pass objects from one robot to the other.
Further details on the coupling schemes and
qualitative and quantitative evaluations will be given
in a coming paper.
5 CONCLUSIONS AND
PERSPECTIVES
This paper presents the specifications and design of a
novel tri-digital dexterous master glove developed for
the sorting and segregation of nuclear waste. This
master glove is composed of a base plate fixed on the
palm and three robots allowing tracking and applying
force feedback on the thumb, index and middle
fingertips. Thanks to its optimized design, it can span
the entire workspace of the fingers, and its high-
performance actuation allows for a good quality force
feedback. After validating that it can be used to
control a three fingers slave hand with force feedback,
it was successfully integrated in a bi-manual
dexterous teleoperation set-up, allowing to grasp and
Figure 19: Grasping various objects in teleoperation.
manipulate various kinds of objects. Further details
on the coupling schemes and evaluations will be
given in a coming paper. Future work should be
dedicated to a more precise experimental
characterization of the device performances.
ACKNOWLEDGEMENTS
This research was partly supported by the Horizon
2020 RoMaNS project (Robotic Manipulation for
Nuclear Sort and Segregation, #645582) funded by
the European Commission.
REFERENCES
Aiple, M., Schiele, A., (2013), Pushing the limits of the
CyberGrasp
TM
for haptic rendering, Proc. IEEE Int.
Conf. on Robotics and Automation, pp. 3541–3546.
Design and Development of a Dexterous Master Glove for Nuclear Waste Telemanipulation
467

Birglen, L., Gosselin, C.M., (2004), Kinetostatic Analysis
of Underactuated Fingers, IEEE Trans. on Robotics and
Automation, 20(2), pp. 211-221.
Birglen, L., Laliberté, T., Gosselin, C., (2008),
Underactuated Robotic Hands, Springer Tracts in
Advanced Robotics 40, Springer-Verlag, Berlin-
Heidelberg, Germany.
Bogue, R., (2009), Exoskeletons and robotic prosthetics: a
review of recent developments, Industrial Robot: An
International Journal, 36(5), pp. 421-427.
Bouzit, M., Burdea, G., Popescu, G., Boian, R., (2002), The
Rutgers master II—New design force-feedback glove,
IEEE/ASME Trans. on Mechatronics, 7(2), pp. 256–
263.
Feix, T., Pawlik, R., Schmiedmayer, H.B., Romero, J.,
Kragic, D., (2009), A Comprehensive Grasp
Taxonomy, Robotics, Science and Systems Conference:
Workshop on Understanding the Human Hand for
Advancing Robotic Manipulation.
Foumashi, M.M., Troncossi, M., Parenti Castelli, V.,
(2011), State of the-art of hand exoskeleton systems,
Internal report, Univ. Bologna, 54p.
Geffard, F., Russotto, F.X., Measson, Y., Andriot, C.,
(2010), Téléopération. Contrôle commande - la
supervision des systèmes de téléopération, Techniques
de l'ingénieur, article S7811.
Geffard, F., Garrec, P., Piolain, G., Brudieu, M.A., Thro,
J.F., Coudray, A., Lelann, E., (2012), TAO2000 V2
Computer-Assisted Force Feedback Telemanipulators
Used as Maintenance and Production Tools at the
AREVA NC-La Hague Fuel Recycling Plant, Journal
of Field Robotics, 29(1), pp. 161-174.
Gonzalez, F., Gosselin, F., Bachta, W., (2014), Analysis of
Hand Contact Areas and Interaction Capabilities
During Manipulation and Exploration, IEEE Trans. on
Haptics, 7(4), pp. 415-429.
Gopura, R.A.R.C., Bandara, D.S.V., Kiguchi, K., Mann,
G.K.I., (2016), Developments in hardware systems of
active upper-limb exoskeleton robots: A review,
Robotics and Autonomous Systems, 75(B), pp. 203-220.
Gosselin, F., (2012), Guidelines for the design of multi-
finger haptic interfaces for the hand, Proc. CISM-
IFToMM Symp. on Robot Design, Dynamics and
Control, pp. 167–174.
Gosselin, F., Andriot, C., Keith, F., Louveau, F., Briantais,
G., Chambaud, P., (2020), Design and Integration of a
Dexterous Interface with Hybrid Haptic Feedback,
Proc. 17
th
Int. Conf. on Informatics in Control,
Automation and Robotics, pp. 455-463.
Heo, P., Min Gu, G., Lee, S.J., Rhee, K., Kim, J., (2012),
Current Hand Exoskeleton Technologies for
Rehabilitation and Assistive Engineering, Int. J.
Precision Engineering and Manufacturing, 13(5), pp.
807-824.
Köhler, G.W., (1981), Typenbuch der Manipulatoren -
Manipulator type book, Thiemig Taschenbücher,
Verlag Karl Thiemig, München, Germany.
Marturi, N., Rastegarpanah, A., Takahashi, C., Adjigble, M.
Stolkin, ,R., Zurek, S., Kopicki, M., Talha, M., Kuo,
J.A., Bekiroglu, Y., (2016), Towards advanced robotic
manipulation for nuclear decommissioning: a pilot
study on tele-operation and autonomy, Proc. Int. Conf.
on Robotics and Automation for Humanitarian
Applications, 8p.
Maxon, (2016), Maxon motor catalogue, programme 2016-
2017.
Ngalé Haulin, E., Lakis, A.A., Vinet, R., (2001), Optimal
synthesis of a planar four-link mechanism used in a
hand prosthesis, Mechanism and Machine Theory,
36(11-12), pp. 1203-1214.
Perret, J., Van der Poorten, E., (2018), Touching Virtual
Reality: A Review of Haptic Gloves, Proc. Int. Conf.
on New Actuators, pp. 270-274.
Piolain, G., Geffard, F., Coudray, A., Garrec, P., Thro, J.F.,
Perrot, Y., (2010), Dedicated and Standard Industrial
Robots used as Force-Feedback Telemaintenance
Remote Devices at the AREVA Recycling Plant, Proc.
IEEE 1
st
Int. Conf. on Applied Robotics for the Power
Industry, 6p.
ROMANS, (2015), Robotic Manipulation for Nuclear Sort
and Segregation, European Commission Portal,
https://cordis.europa.eu/project/id/645582
Vertut, J., Coiffet, P., (1984), Les robots - Tome 3A :
téléopération, évolution des technologies, Hermès
Publishing, Paris, France.
WNN, (2015), Funding for waste-handling robotics
development, World Nuclear News,
https://www.world-nuclear-news.org/NN-Funding-for-
waste-handling-robotics-development-2502154.html
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
468
