
TC-CNN: Trajectory Compression based on Convolutional Neural
Network
Yulong Wang
1,2,3
, Jingwang Tang
1,3
and Zhe Jia
2
1
School of Computer Science (National Pilot Software Engineering School),
Beijing University of Post and Telecommunications, Beijing, China
2
Science and Technology on Communication Networks Laboratory, Shijiazhuang, China
3
State Key Laboratory of Networking and Switching Technology, Beijing, China
Keywords: Automatic Identification System, Trajectory Compression, Convolutional Neural Networks, Threshold.
Abstract: With the Automatic Identification System installed on more and more ships, people can collect a large number
of ship-running data, and the relevant maritime departments and shipping companies can also monitor the
running status of ships in real-time and schedule at any time. However, it is challenging to compress a large
number of ship trajectory data so as to reduce redundant information and save storage space. The existing
trajectory compression algorithms manage to find proper thresholds to achieve better compression effect,
which is labor-intensive. We propose a new trajectory compression algorithm which utilizes Convolutional
Neural Network to perform points classification, and then obtain a compressed trajectory by removing
redundant points according to points classification results, and finally reduce the compression error. Our
approach does not need to set the threshold manually. Experiments show that our approach outperforms
conventional trajectory compression algorithms in terms of average compression error and fitting degree
under the same compression rate, and has certain advantages in time efficiency.
1 INTRODUCTION
In recent years, with the continuous expansion of the
scale of global trade, shipping has gradually become
the main means of trade transportation among
countries. In order to ensure the safety of the marine
navigation vessel, position the vessel in real-time (G.
Pallotta, M. Vespe, and K. Bryan, 2013), plan the
channel for the management of maritime traffic, and
improve the efficiency of the ship (Al-Zaidi R, Woods
J. C., Al-Khalidi M., et al., 2018), the International
Maritime Organization demands that ships with more
than 300 tons must be equipped with Automatic
Identification System (AIS) (Muckell J., Hwang J. H.,
Lawson C. T., et al., 2010), through which a ship
sends its own position coordinates to nearby base
stations. The shore-based equipment can generate the
corresponding ship trajectory data based on these time
series containing the real-time coordinates of the ship.
However, due to the large number of ships, the daily
generated data will be huge, and there are a lot of
redundant data, which not only consume a great
amount of memory space, but also increase the burden
of server analysis and route data processing (Vries G.,
Someren M. V., 2012). Therefore, how to compress
the AIS trajectory data effectively has attracted many
researchers.
Trajectory compression algorithms are mainly
classified to offline algorithm and online algorithm.
This paper focuses on the offline trajectory
compression algorithm. An offline trajectory
compression algorithm obtains a complete original
track and then compresses it. Douglas Peucker
algorithm (DP) is the most classical offline
compression algorithm. It determines which points
need to be eliminated by recursive segmenting of
tracks, from whole to local, and gradually refining
compression interval (Liu J., Li H. & Yang Z., et al,
2019). Singh et al. (Singh A. K., Aggarwal V. &
Saxena P., et al., 2017) proposed a SPM algorithm
based on the DP algorithm. It adjusts the selection of
baseline of error measurement and compares the error
of trajectory points in turn using new error
measurement methods. Long et al. (Long Hao et al.,
2018) proposed a Trajectory Compression algorithm
170
Wang, Y., Tang, J. and Jia, Z.
TC-CNN: Trajectory Compression based on Convolutional Neural Network.
DOI: 10.5220/0010577801700176
In Proceedings of the 2nd International Conference on Deep Learning Theory and Applications (DeLTA 2021), pages 170-176
ISBN: 978-989-758-526-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

with Adaptive parameters (ATC), where the
automatic threshold calculation is realized by
inputting an expected compression rate λ by users.
Kangasuan et al. (Hansuddhisuntorn K., Horanont T.,
2019) proposed Improvement of TD-TR Algorithm.
Inspired by the success of deep learning in recent
years, this paper aims to improve the performance of
trajectory compressing by using Convolutional
Neural Network (CNN). A new algorithm, named
Trajectory Compression based on Convolutional
Neural network (TC-CNN) is proposed, which
utilizes CNN to perform points classification, and
then obtain a compressed trajectory by removing
redundant points according to points classification
results, and finally reduce the compression error. The
contributions of this paper are as follows:
1 To the best of our knowledge, it is the first work
to utilize deep learning technique on the problem
of offline trajectory compression. The CNN-
based recognition of feature points and non-
feature points is leveraged to compress tracks.
2 The designed CNN can classify the feature
points and redundant points in the track with
high precision, and significantly reduces the cost
of labour-intensive threshold adjustments
required by most of the existing trajectory
compression algorithms;
3 Experiments are conducted to compare the
performance of the proposed approach with
several benchmark algorithms. The results show
the efficacy of the proposed approach.
2 RELATED WORK
2.1 Trajectory Compression Algorithm
Douglas–Peucker (DP) (Singh A K, Aggarwal V &
Saxena P, 2017) is the most classic algorithm in the
off-line trajectory compression algorithm. It needs to
set a distance threshold
ε , and then calculate the
maximum vertical distance between the other points
in the track and the starting and ending points of the
track. If the distance is less than the threshold, then all
the points except the starting and ending points of the
track will be removed as redundant points. If the
distance is greater than the threshold, the trajectory is
split from the point, and then the sub trajectory is
recursively processed. DP is used widely as a
benchmark of trajectory compression algorithm.
Trajectory compression algorithm with adaptive
parameters (ATC) (Long Hao et al., 2018) abandoned
the compression threshold in the traditional trajectory
compression algorithm by setting the compression
ratio λ, and used the compression ratio to calculate the
threshold automatically. At the same time, the
compression algorithm is divided into three stages.
Firstly, the synchronous Euclidean distance of
each trajectory data point is calculated, and the
maximum value is selected.
Secondly, the compression threshold ε is
calculated according to the preset compression ratio λ
and the maximum synchronous Euclidean distance. If
the current Trajectory compression ratio is greater
than the preset value λ, the current Trajectory
compression threshold will be adjusted to 90% of the
previous compression threshold each time except for
the first time to achieve the purpose of automatic
calculation of the threshold until the compression
ratio is less than λ.
Finally, the first point whose synchronous
Euclidean distance is greater than ε will be found as
the dividing point. At the same time, all the track
points whose synchronous Euclidean distance is less
than ε will be eliminated. According to the dividing
point, the track composed of the remaining points will
be divided into two new tracks, and then the ATC
algorithm will be used recursively to compress until
the compression ratio is less than or equal to λ.
ATC achieves a relatively high fitting degree, but
incurs a low execution efficiency.
2.2 Trajectory Compression Evaluation
Metric
The widely used evaluation metric is Trajectory
Compression Ratio (TCR). The main purpose of
trajectory compression algorithm is to fit the original
trajectory with as few data points as possible, so as to
reduce the memory occupation of trajectory while
reducing the distortion of trajectory as much as
possible. Therefore, TCR is usually an important
metric for measuring the effectiveness of a trajectory
compression algorithm. TCR is defined as the
percentage of the number of track points P
c
after
compression and the number of track points P
u
before
compression, as shown in Eqn. (1)
.
u
c
p
p
=
λ
(1)
Another metric is Average Compression Error
(ACE). It is the difference between the original track
and the compressed track in geometry. The
TC-CNN: Trajectory Compression based on Convolutional Neural Network
171

calculation of ACE is as follows. First, label the
original track in time order. Second, calculate the
vertical Euclidean error of each removed point in the
compressed track. Third, use the reserved point label
in the current track and its closest two points as the
reference point to calculate the vertical Euclidean
distance of the datum line. Finally, the sum of all
calculated values is divided by the number of original
trajectory points to obtain ACE. An ACE δ can be
calculated by Eqn. (2):
()
,
m
d
ii
y
=
=
m
1i
,x,r
i
δ
(2)
where m is the number of original trajectory points;
r
i
(i = 1, ..., n) is a removed point; The subscript i is the
label of the point in the original trajectory; x
i
and y
i
are the front and back points of
r
i
; d is the vertical
Euclidean distance between
r
i
and the line
determined by
x
i
and y
i.
3 PROBLEM DEFINITION
In this section, the trajectory compression related
definitions are provided.
Define 1. Trajectory. The AIS data generated by a
ship on the sea can be regarded as a two-dimensional
coordinate point with time dimension and
geographical location dimension (T
i
,G
i
). The line
segment formed by the same ship in order of time
coordinates is the ship's navigation track in a period
of time. The trajectory includes the location, time,
direction, route, and geographical area of the ship.
The two most important attributes are time and
geographical coordinates, so the ship's moving
trajectory can be regarded as a mapping relationship
from time to space M:T
i
→G
i
. Among them, M is a
continuous function based on time change, and its
independent variable time t belongs to Ti. Through
this function and a certain time value, a two-
dimensional coordinate corresponding to the ship at
this time point can be obtained(x
i
,y
i
).
Define 2. Redundant Points and Feature Points. In
a track with multiple points, if some of them are
removed, only the remaining points can fit the
original track well, and the information loss is within
the acceptable range, the removed track points are
called redundant points, and the remaining points are
called feature points.
Define 3. Precursor Point and Successor Point.
Hypothesis p
i
is a point on the trajectory T = {p
i-2
, p
i-
1
, ..., p
i+n
}, of the same ship in a continuous time series,
Then the two points adjacent to each other in the time
series are the adjacent points of the trajectory. The point
earlier than p
i
is called the precursor point of p
i
, and the
point later than p
i
is called the successor point of p
i
.
Definition 4. Synchronous Euclidean distance
(
Singh A K, Aggarwal V & Saxena P
, 2017). Hypothesis
p
i
is a point in the original trajectory,Connect the
starting and ending points of the datum of p
i
(which
can be the precursor and successor points of the point).
If the ship is regarded as moving at a constant speed
during this period, the distance between p
i
` and the
projection point p
i
` of its synchronous position on the
starting and ending line of the datum is its
synchronous Euclidean distance, which is greater than
or equal to the vertical distance from p
i
` to the starting
and ending line of the datum. As shown in Fig. 1.
Figure 1: Illustration of synchronous Euclidean distance.
The solid line segment is a track from point A to
point E, AE is the connecting line segment composed
of the datum starting and ending points A and E of G,
the perpendicular foot of point G on the AE
connecting line is point G, and the time interval
between A and G is t
1
, The time interval of AE is t
2
,
and AE can be regarded as a function of time interval
t
d
, Where 0
≤
t
d
≤
t
2
, Then the coordinate point of
projection point C of G on AE should be
ii
tt =
`
(3)
)(x
2
1
`
mnmi
xx
t
t
x −×+=
(4)
)(y
2
1
`
i mnm
yy
t
t
y −×+=
(5)
In AIS trajectory processing, in order to facilitate
practical use, improve calculation accuracy and
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
172
reduce errors, the longitude and latitude coordinates
in AIS data are usually converted to their
corresponding Mercator coordinates (
Walkenhorst B T,
Nichols S
,2020). Eqn. (6-9) are used to calculate
Mercator coordinate, where
r
0
is the radius of the
datum latitude circle, a is the radius of the major axis
of the earth's ellipsoid, q is the equivalent dimension,
and e is the first eccentricity of the earth's ellipsoid (
Li
Houpu, Li Haibo & Tang Qinghui
., 2019). Suppose that
the longitude and latitude coordinates of G are
),(
ii
yx
, and its corresponding Mercator coordinates
are (φ,ω).
ϕϕ
cossin1
r
22
0
×−
=
e
a
(6)
ϕ
ϕϕπ
sin1
sin1
ln
2
)
42
tan(ln
e
ee
q
−
+
−+=
(7)
ω
×=
0i
rx
(8)
qr ×=
0i
y
(9)
Suppose that the coordinate of point G is
),,(
iii
tyx
. The coordinate of projection point C of
its synchronous position is
),,(
、、、
iii
tyx
. Then the
coordinate calculation of C is:
)(`x
1
1
11
1
1
−
−×
−
−
+=
+
−+
−
−
i
xx
tt
tt
x
i
ii
ii
ii
(10)
)(`y
11
11
1
1 −+
−+
−
−
−×
−
−
+=
ii
ti
ii
i
yy
tt
tt
y
(11)
From the Mercator coordinates (φ,ω) of G and the
Mercator coordinates (φ`,ω`) of the projection point
C of its synchronous position, the synchronous
Euclidean distance of G can be obtained by Eqn. (12).
22
)`()`(sed
iiii
ωωφφ
−+−=
(12)
Eqn. (12) is the length of the GC segment, as
shown in Fig. 1.
4 TC-CNN
The proposed approach TC-CNN consists of two part:
the point classification CNN and the trajectory
compression algorithm, which are elaborated as
follows.
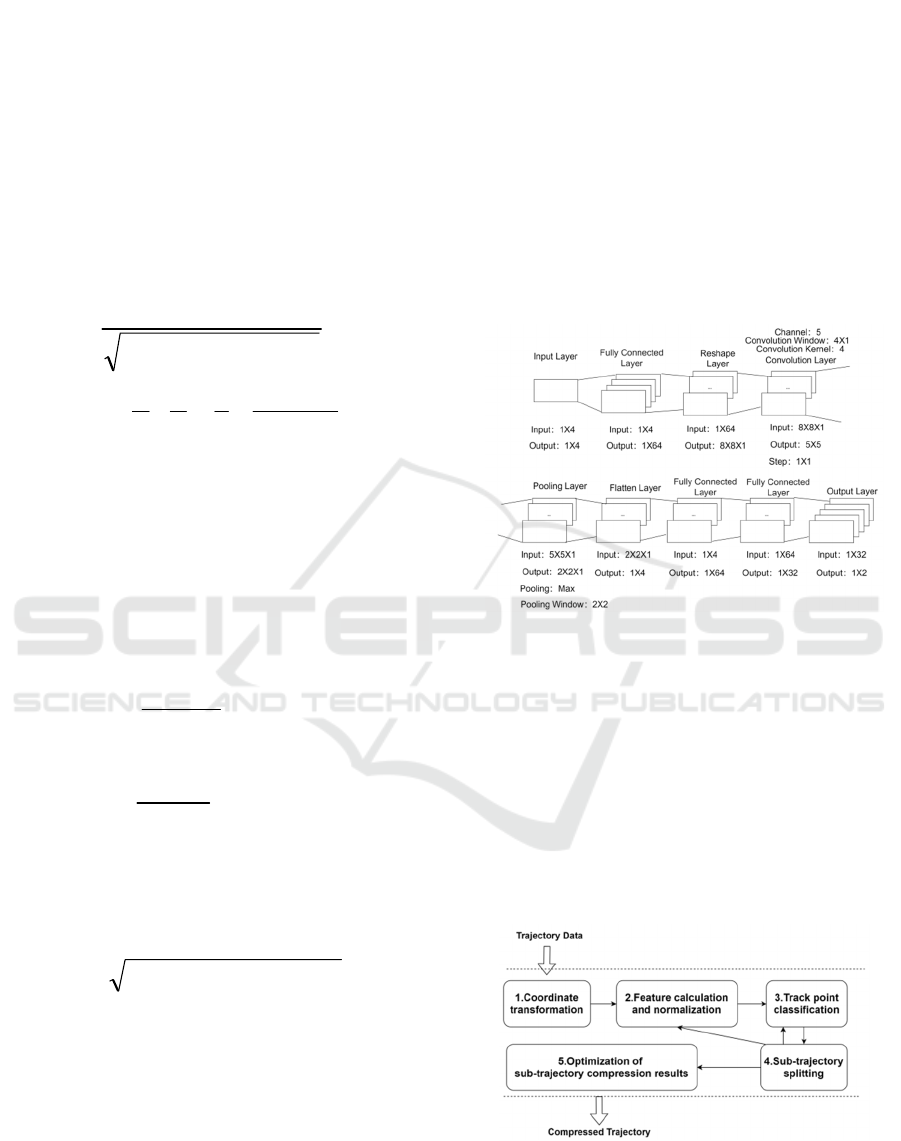
4.1 Point Classification CNN
We use an 8-layer CNN to classify the track points
into redundant points and feature points, whose
architecture is shown in Fig. 2. The input layer is
followed by a fully connected layer, and then a
flattening layer is connected to transform the input
into data with appropriate dimension. The third layer
is a convolution layer, which is followed by a max
pooling layer. After the data are reshaped by another
flatten layer, they are feed into two fully connected
layers one after another. Finally, the data are classified
by the output layer into two categories.
Figure 2: Architecture of the Point Classification CNN.
In the training phase the CNN, the epoch is 150,
the optimizer is Adam, the batch size is 64, the initial
learning rate is 0.005, and the cross entropy function
is used as the loss function.
4.2 Trajectory Compression Algorithm
The flowchart of the proposed trajectory compression
algorithm is shown in Fig. 3. The process of the
algorithm consists of five phases.
Figure 3: Flow chart of the proposed algorithm.
The first phase is coordinate transformation.
Because the coordinates of original trajectory data are
TC-CNN: Trajectory Compression based on Convolutional Neural Network
173

longitude and latitude coordinates, in order to ensure
the accuracy of feature calculation, it is necessary to
convert longitude and latitude coordinates into
Mercator coordinates.
The second phase is feature calculation and
normalization. For each point in the track, the
synchronous Euclidean distance of the corresponding
reference starting and ending points (i.e., the original
track or the split sub-track starting and ending points)
and the deflection angle, adjacent time difference and
adjacent speed difference based on the precursor point
and the successor point are calculated, respectively.
Then, the normalization operation is carried out, after
which the four features form a vector of features
corresponding to the trajectory point.
The third phase is track point classification. The
feature vector sequence corresponding to each point
of the original trajectory is input into the trained point
classification CNN, where each point is classified into
either redundant or feature points.
The fourth phase is sub-trajectory splitting. Based
on the output of the point classification CNN, the
original trajectories are divided into sub-trajectories
by using Alg. 1. The sub-trajectories are further
processed through the second and third phase. Then,
the redundant points in the sub-trajectories are
identified and removed.
The fifth phase is the optimization of sub-
trajectory compression results. According to the
classification results and Alg. 2, the compressed sub
trajectory is optimized, and the optimization results
are combined into a complete compression track.
4.2.1 Sub-trajectory Compression
The feature of each point in a preprocessed original
trajectory T
0
= {t
1
, t
2
, …, t
n
} requires to be calculated.
Firstly, the synchronous Euclidean distance of the
rest points in the trajectory is calculated based on the
global view, with the starting point
t
1
and the ending
point t
n
as the reference points. At the same time, the
deflection angle, adjacent time difference and
adjacent speed difference are calculated based on the
precursor and successor points of each point
Secondly, the calculated feature sequence is input
into the trained network model for trajectory point
classification. The maximum synchronous Euclidean
distance of one or more trajectory points classified as
redundant points are used as the threshold, with which
the original track is split. The specific splitting
process is as follows: if the maximum synchronous
Euclidean distance of the track points except t
1
and t
n
is less than the threshold, the synchronous Euclidean
distance of other points in the sub-track is updated
with the starting and ending point of the current sub-
track as the reference point, and then the sub-track is
split. The trace is compressed. If the maximum
synchronous Euclidean distance of the point except t
1
and t
n
is greater than the threshold, the track is split
from the point.
Finally, the synchronous Euclidean distance of the
sub-trajectory is calculated with its start and
endpoints again.
The above process is carried out recursively, and
summarized as Alg. 1.
Algorithm 1: SubTrajCompress.
4.2.2 Compression Error Reduction
It is possible to further reduce the compression error
of the obtained trajectory.
Firstly, the data points in the original trajectory are
labeled according to their time order, and the intervals
are divided according to the trajectory splitting results
of Alg. 1.
Secondly, the original trajectory is divided into
optimized intervals according to the split sub
trajectory, and then the two trajectory points
belonging to different categories are replaced by
categories, so as to ensure that the compression ratio
will not be changed, After each transformation, the
average compression error and Hausdorff distance
between the current trajectory segment and the
original trajectory segment are calculated, and the
result with the smallest error is retained as the
optimization result of the current trajectory segment.
Finally, the optimized compressed trajectory can
be obtained by combining the optimization results of
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
174

each trajectory segment.
The above process is summarized as Alg. 2.
Algorithm 2: ReduceCompressErr.
5 EXPERIMENTS
5.1 Data Set for CNN Training
The training data are from AIS records. The sample of
feature points and redundant points are obtained by
using several conventional trajectory compression
algorithms, e.g. SPM algorithm based on synchronous
Euclidean distance, improved top-down time ratio
compression algorithm, ATC algorithm based on an
adaptive threshold. In the end, we build a training data
set with 18,000 feature points and 18,000 redundant
points.
5.2 Experimental Results
In this section, the run time, TCR and ACE of TC-
CNN are evaluated and compared with the DP and
ATC. Due to the large amount of AIS data, only part
of the ship data is randomly selected as experimental
data to verify the algorithm model effect. In order to
ensure the preciseness of the experimental results, all
the experimental results are based on the compression
ratio of the proposed approach. The threshold or
compression ratio of the compared algorithms are
tuned to be close to each other with a variance of no
more than 2%. The database is MongoDB, the GPU
card is gtx1060ti, the memory is 16GB, the CPU is
3.4GHz Core i7 7700hq.
5.2.1 Comparison of Run Time and TCR
The time complexity of the considered algorithms are
all O(nlogn). In order to compare the actual time
performance of each algorithm, we use 1200 AIS
trajectories (including 1657647 data points) to test the
time cost of each algorithm under different
compression rates, and the results are shown in Table 1.
Table 1: Run Time under different TCR.
Algorithm
TCR
RunTime/ms
DP
0.859
371,348.00
ATC
0.876
762,596.00
TC-CNN
0.872
621,574.00
It can be seen from table 1 that ATC algorithm has
the largest time cost, DP algorithm has the lowest time
cost, and TC-CNN algorithm is in between the time
cost of TC-CNN algorithm is higher than that of DP
algorithm because of the time consumption of data
preprocessing. If the ideal trajectory data is
compressed, the time performance cost of TC-CNN
algorithm will be close to that of DP algorithm.
Therefore, compared with the ATC algorithm, TC-
CNN algorithm has some advantages in running time.
5.2.2 Comparison of ACE
The author randomly selected 10, 50, 100, 200 and
500 ship trajectories from AIS actual data to carry out
the average compression error experiments
(compression rate ranges are [0.914,0.928],
[0.938,0.954], [0.851,0.869], [0.925,0.942],
[0.872,0.889]). The results are shown in Table 2.
Table 2: Comparison of ACE.
#traj. 10 50 100 200 500
DP 3.51 3.01 4.86 3.34 4.35
ATC 3.09 2.66 4.18 2.97 3.82
TC-CNN 3.18 2.47 3.64 2.85 3.23
As can be seen from Table 2, the average
compression error of DP algorithm is the highest. Due
to the introduction of synchronous Euclidean distance
to measure the time and space characteristics of the
trajectory, the compression error of ATC algorithm is
lower than that of DP algorithm. The average
TC-CNN: Trajectory Compression based on Convolutional Neural Network
175

compression error of TC-CNN algorithm is close to
that of ATC algorithm. Although the average
compression error of TC-CNN algorithm is slightly
higher than that of ATC algorithm when the number
of experimental samples is small (10 data), with the
increase of the number of experimental samples, the
average compression error of TC-CNN algorithm is
gradually lower than that of ATC algorithm.
Considering that there may be some specific
trajectories in the experiment of a small number of
data samples, which have better agreement with some
algorithms, the average compression error of TC-
CNN algorithm is higher than that of ATC algorithm
This part of the algorithm performs better, so a large
number of data sample experiments can better reflect
the overall effect of the algorithm, so on the whole,
the average compression error of TC-CNN algorithm
is the lowest. The results show that the accuracy of
TC-CNN algorithm is higher.
6 CONCLUSIONS
This paper proposes a trajectory compression
approach based on convolutional neural network
Trace compression algorithm can not only eliminate
the blindness of threshold determination, but also has
better applicability. It can improve the compression
accuracy of the network model by using a training set
with better feature differentiation or adding training
set data. The experimental results show that the
proposed approach can retain the key features of the
original trajectory and fit the original trajectory well,
and its compression effect is better than some
traditional offline trajectory compression algorithms.
But the algorithm still has some shortcomings, such
as the time cost is still large, in addition, how to obtain
typical data sets for model training, in order to
improve the accuracy of model compression results,
this is the direction of the next step.
ACKNOWLEDGEMENTS
This work is funded by Open Fund Project of Science
and Technology on Communication Networks
Laboratory (Grand No HHX21641X003)
.
REFERENCES
Pallotta, Giuliana, Vespe, et al. Vessel Pattern Knowledge
Discovery from AIS Data: A Framework for Anomaly
Detection and Route Prediction[J]. Entropy, 2013.
Al-Zaidi R., Woods J. C., Al-Khalidi M., et al. Building
Novel VHF-Based Wireless Sensor Networks for the
Internet of Marine Things[J]. IEEE Sensors Journal,
2018, 18(5):1-1.
Muckell J., Hwang J. H., Lawson C. T., et al. Algorithms for
compressing GPS trajectory data[C]// 2010:402.
Vries G., Someren M. V. Machine learning for vessel
trajectories using compression, alignments and domain
knowledge[J]. Expert Systems with Applications, 2012,
39(18):13426-13439.
Liu J., Li H., Yang Z., et al. Adaptive Douglas-Peucker
Algorithm with Automatic Thresholding for AIS-Based
Vessel Trajectory Compression[J]. IEEE Access, 2019,
7:150677-150692.
Singh A. K., Aggarwal V., Saxena P., et al. Performance
analysis of trajectory compression algorithms on marine
surveillance data[C]// 2017 International Conference on
Advances in Computing, Communications and
Informatics (ICACCI). 2017.
Long Hao, Zhang Shukui, Sun Penghui. Trajectory
compression algorithm with adaptive parameter,
Application Research of Computers[J], 2018, 35(3),
pp.685-688,716.
Hansuddhisuntorn K., Horanont T. Improvement of TD-TR
Algorithm for Simplifying GPS Trajectory Data[C]//
2019 First International Conference on Smart
Technology & Urban Development (STUD), 2019.
Walkenhorst B. T., Nichols S. Revisiting the Poincaré
Sphere as a Representation of Polarization State[C]//
2020 14th European Conference on Antennas and
Propagation (EuCAP), 2020.
Li Houpu, Li Haibo, Tang Qinghui, Direct transformation
between equiangular and equiarea, orthographic
cylindrical projections in the case of ellipsoid[J],
Journal of marine technology, 2019(5):15-20.
Douglas D. H., Peucker T. K., Algorithms for the Reduction
of the Number of Points Required to Represent a
Digitized Line or its caricature[J]. Canadian
Cartographer, 2006, 10(2):112-1.
DeLTA 2021 - 2nd International Conference on Deep Learning Theory and Applications
176
