
BioDeep: A Deep Learning System for IMU-based Human Biometrics
Recognition
Abeer Mostafa
1 a
, Samir A. Elsagheer
1,3 b
and Walid Gomaa
1,2 c
1
Cyber-Physical Systems Lab, Egypt Japan University of Science and Technology, Alexandria, Egypt
2
Faculty of Engineering, Alexandria University, Alexandria, Egypt
3
Faculty of Engineering, Aswan University, Egypt
Keywords:
IMU, Transfer Learning, Convolutional Neural Networks, Age and Gender Recognition, Deep Learning.
Abstract:
Human biometrics recognition has been of wide interest recently due to its benefits in various applications
such as health care and recommender systems. The rise of deep learning development, together with the mas-
sive data acquisition systems, made it feasible to reuse models trained on one task for solving another similar
task. In this work, we present a novel approach for age and gender recognition based on gait data acquired
from Inertial Measurement Unit (IMU). BioDeep design is composed of two phases, first of which is applying
a statistical method for feature modelling, the autocorrelation function, then building a Convolutional Neural
Network (CNN) for age regression and gender classification. We also use random forest as a baseline model to
compare the results achieved by both methods. We validate our models using four publicly available datasets.
The second phase is doing transfer learning over these diverse datasets. We train a CNN on one dataset and
reuse its feature maps over the other datasets for solving both age and gender recognition problems. Our
experimental evaluation over the four datasets separately shows very promising results. Furthermore, trans-
fer learning achieved 20 − 30x speedup in the training time in addition to keeping the acceptable prediction
accuracy.
1 INTRODUCTION
Recognition of human biometrics such as age and
gender has been widely been studied in the recent
decades due to its important use in many applica-
tions such as speech analysis (Markitantov, 2020),
(Albuquerque et al., 2021), recommendation sys-
tems (Sun et al., 2017), and of course health care
applications (Rosli et al., 2017). Researchers use
various types of data for performing age and gen-
der recognition starting from images, voice signals
to inertial measurement unit (IMU) signals. In this
paper, we build our age and gender recognition sys-
tem based on IMU data. IMUs have two essential
sensors: accelerometer and gyroscope and sometimes
more additional sensors are included. The accelerom-
eter sensor produces a tri-axical signal correspond-
ing to the proper acceleration of the moving body
accelerometer-X, accelerometer-Y, accelerometer-Z,
a
https://orcid.org/0000-0002-8971-4311
b
https://orcid.org/0000-0003-4388-1998
c
https://orcid.org/0000-0002-8518-8908
whereas the gyroscope sensor is used to determine the
angular velocity of the moving body, and also pro-
duces a tri-axical signal gyroscope-X, gyroscope-Y,
and gyroscope-Z.
The motivation for this work is that there is a big
gap in research regarding the analysis of human bio-
metrics based on IMU data since most of the literature
uses IMU data for human activity recognition only. In
addition, nowadays, IMUs are embedded in all of the
wearable devices we use in our everyday life so it will
be suitable for our analysis to work on IMU data.
Our contributions are illustrated as follows. We
propose a novel methodology for the analysis of hu-
man biometrics based on IMU data and applying it
specifically on age regression and gender classifica-
tion using various datasets. In addition, our work is
the first of its kind to perform cross-testing (transfer
learning) for age regression and gender classification
using IMU data. Furthermore, we measure the tim-
ings for our experiments and report the computational
speedup gained in our approach.
We begin firstly by applying autocorrelation func-
tion on the accelerometer and gyroscope signals for
620
Mostafa, A., Elsagheer, S. and Gomaa, W.
BioDeep: A Deep Learning System for IMU-based Human Biometrics Recognition.
DOI: 10.5220/0010578806200629
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 620-629
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

feature modeling. The reason for choosing this statis-
tical feature is that it is simple, efficient, and helps
in reducing the input data size which is better in
terms of processing time and memory. Afterwards,
we apply modern machine learning techniques for
age regression and gender classification. We begin
by using random forest as it is considered a power-
ful machine learning model. Additionally, we investi-
gate the deep learning approach and compare both re-
sults. In the deep learning approach, we apply a Con-
volutional Neural Network (CNN) on each dataset.
Consequently, We apply transfer learning from one
dataset to another for the sake of minimizing the num-
ber of learning parameters and, hence, reducing train-
ing time dramatically.
We apply our proposed methodology on four pub-
licly available datasets: EJUST-GINR-1 (Mostafa
et al., 2020), OU-ISIR (Ngo et al., 2014), GEDS (Mi-
raldo et al., 2020), and HuGaDB (Chereshnev and
Kert
´
esz-Farkas, 2017). We begin by applying both
models (random forest and CNN) on each dataset sep-
arately for gender classification and age regression,
then we perform cross testing by training the CNN on
one dataset then fine-tune and test on the others.
The rest of the paper is organised as follows. In
section 2, we review the state of the art research work
that have been published in the area of age and gender
estimation and also in the area of transfer learning. In
section 3, we provide a brief description for all of the
four considered datasets. In section 4, we illustrate
our proposed methodology in detail. In section 5, we
explain the setup for our experiments. In section 6, we
show and discuss the results achieved by our method-
ology. Finally, we summarize our work in section 7
and conclude the paper.
2 RELATED WORK
In this section, we briefly provide a literature review
on the latest work that have been published related to
two research areas. Firstly, research that addresses
solving the problem of age and gender estimation.
Secondly, research in the area of deep learning ap-
plied to solve classification or regression problems us-
ing IMU signals with focus on doing transfer learning
among various datasets.
2.1 Age and Gender Recognition
Age and gender recognition has been a common re-
search area for many years. Almost all types of
data have been used in research to identify these
characteristics for various applications. The authors
in (Mostafa et al., 2020), proposed a robust method
for gender recognition based on IMU data acquired
from 8 sensors placed in 8 different positions on
the human body during gait activity. The proposed
method included using wavelet transform as a feature
extractor along with various classifiers. They eval-
uated their approach on EJUST-GINR-1 dataset and
had successfully reached accuracy up to 96.74% us-
ing the sensor placed on the left cube.
With reference to (Ngo et al., 2019), a competi-
tion on gender and age recognition was conducted us-
ing OU-ISIR Gait dataset (Ngo et al., 2014), which
includes IMU signals extracted during gait activity.
According to the competition results, most of the par-
ticipated teams got relatively low accuracy in gender
classification. However, the results of age regression
were obviously better. The best results were presented
in (Garofalo et al., 2019) which showed accuracy of
gender classification reaching 75.77% and age regres-
sion with mean absolute error equals to 5.3879 by
using orientation independent AE-GDI representation
along with a CNN.
In the work proposed by (Riaz et al., 2015), a sys-
tem for gender, age, and height estimation was pre-
sented based on IMU gait signals of four sensors lo-
cated on the moving body. The authors used ran-
dom forest classifier along with two validation meth-
ods: 10-fold cross-validation and subject-wise cross-
validation. They categorized the age to three groups
to perform age classification: less than 40 years, be-
tween 40 and 50, and older than 50 years. The high-
est accuracy for gender classification was achieved by
the chest sensor and equals to 92.57%. Regarding
age classification, the accuracy reached 88.82% using
chest and lower back sensors.
The authors in (Jain and Kanhangad, 2016) inves-
tigated gender recognition using accelerometer and
gyroscope data from the built-in smartphone sensors.
The authors used multi-level local pattern (MLP) and
local binary pattern (LBP) as feature extractors. To
classify the extracted features, the authors used sup-
port vector machine (SVM) and aggregate bootstrap-
ping (bagging). To evaluate these models, 252 gait
signals collected from 42 subjects were used. The fi-
nal result for gender classification reached 77.45% by
applying MLP along with bagging.
2.2 Deep Learning and Transfer
Learning on IMU Data
Research in deep learning has gained a huge popular-
ity in the recent few years and proved to be a powerful
methodology for solving machine learning problems.
Some researchers applied deep learning and transfer
BioDeep: A Deep Learning System for IMU-based Human Biometrics Recognition
621

learning on IMU signals to perform classification or
regression tasks which resulted in good performance.
The authors in (Abdu-Aguye and Gomaa, 2019)
proposed a robust method for doing transfer learn-
ing over IMU data in the domain of human activity
recognition. Their approach was to train a CNN on
one dataset and use the convolutional filters as fea-
ture extractor, then train a feed forward neural net-
work as a classifier on the extracted features for other
datasets. This method proved to be very promising
as the results were within 5% compared to the CNNs
which were trained from scratch, end-to-end, with
time speedup of 24 − 52x.
In (Fu et al., 2021), the authors designed a com-
pact wireless wearable sensing node that combines
an air pressure sensor and IMU to be used for hu-
man activity recognition. Their method is to ap-
ply a transfer learning algorithm that consists of a
joint probability domain adaptive method with im-
proved pseudo-labels (IPL-JPDA). The authors used
this method to recognise 7 daily human activities.
The average recognition accuracy of different subjects
reached 93.2%.
With reference to (Du et al., 2019), the authors
used cascade learning and compared it to end-to-end
learning in many transfer learning experiments ap-
plied to human activity recognition for IMU data.
The method proved to be robust and reliable. They
achieved 15% improvement of F1 score compared to
other methods.
The authors in (Ashry et al., 2020) Proposed a
deep learning method called CHARM-Deep to per-
form offline/online continuous human activity recog-
nition based on IMU data streams collected from
smartwatches. They built a cascaded bi-directional
long short term memory (Bi-LSTM) to classify the
feature vector extracted from IMU data. Statisti-
cal features such as autocorrelation, entropy, median
were extracted from the signals, then fed to the Bi-
LSTM. The proposed method achieved high accuracy
of 94.2% to 97.2% in classification of all activities.
In addition, it reduced the processing time by 86%
compared to training Bi-LSTM on raw data with also
space reduction by 97.7%.
From the previous literature, it is apparent that
deep learning methods including transfer learning can
demonstrate very good performance on accelerometer
and gyroscope signals. However, these methods were
only used in human activity recognition. In this work,
we investigate the use of deep learning and, in particu-
lar, transfer learning on accelerometer and gyroscope
data to be applied for age and gender estimation and
seeing if deep learning can learn the features that dis-
tinguish the gender of a person and the features that
accurately estimate their age during the particular ac-
tivity of “walking”. In addition, we investigate doing
transfer learning (cross-testing) among four datasets
to see if the learned feature space from one dataset
can effectively be used on another dataset and gain
time speedup compared to training the network on
each dataset from scratch.
3 DATASETS
Before we illustrate our proposed methodology, we
provide a brief description of the datasets we used to
run our experiments to its test the validity and effec-
tiveness. We used four publicly available datasets.
Each dataset was collected in a different place with
different environmental setup. Furthermore, the
datasets were collected using different devices, so
they produce other modalities beside accelerometer
and gyroscope, however, we consider only accelerom-
eter and gyroscope signals in our analysis. These two
sensors are available in all of the considered datasets,
so it will make possible to do transfer learning. An-
other variation among the datasets is sensor place-
ment, meaning that the IMU sensors were placed dif-
ferently in each dataset, however, we consider the
placements they have in common. For example, if
a dataset has all sensors placed on legs only and the
other dataset has sensors placed on arms and legs, we
consider the data of leg sensors only to do transfer
learning. In the following four subsections, we briefly
explain each dataset.
3.1 EJUST-GINR-1 Dataset
EJUST-GINR-1 dataset (Mostafa et al., 2020), (Adel
et al., 2020) was collected using six IMU sensors
called MetaMotionR in addition to two Apple smart
watches series-1 at each hand. The sensor placement,
as shown in Figure 1, are: waist, back, left upper arm,
right upper arm, left cube, and right cube. The data
acquisition system was able to synchronize the eight
sensing elements together when a subject was walk-
ing and capture the accelerometer and gyroscope sig-
nals with 50Hz frequency.
Twenty subjects participated in collecting this
dataset, 10 males and 10 females, with age ranging
from 19 years to 33 years. The procedure of collect-
ing the data was that each person walks naturally on a
straight ground for 20 minutes decomposed into small
sessions. The total number of samples in the dataset
is 5, 292 fixed-length samples.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
622
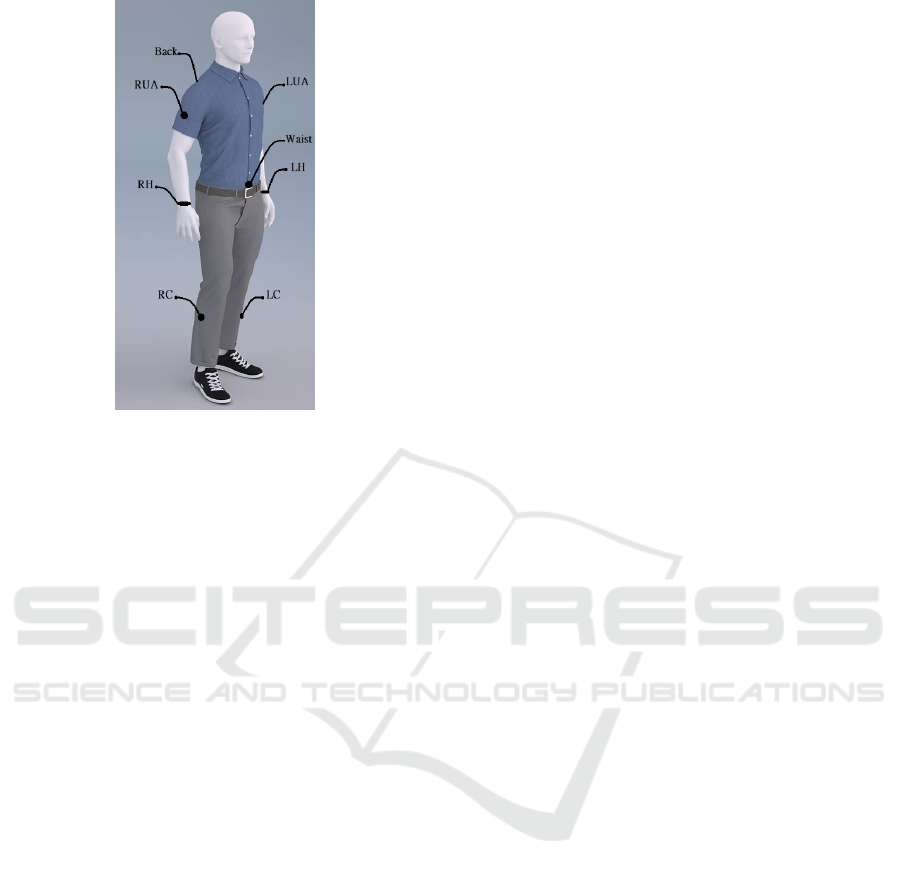
Figure 1: EJUST-GINR-1 dataset sensor placement.
3.2 OU-ISIR Gait Dataset
The OU-ISIR gait dataset (Ngo et al., 2014) is the
largest IMU gait dataset in the world. The dataset was
collected using three IMU sensors named as IMUZ
and a Motorola smartphone placed on a belt around
the waist of the person. The dataset includes a tri-
axial accelerometer and a triaxial gyroscope gait sig-
nals of 744 subjects (389 males and 355 females) with
age ranging from 2 years to 78 years. The data was
recorded at frequency of 100Hz. The dataset was col-
lected in an exhibition and formulated for many dif-
ferent research purposes. Each person provided two
signals of level walk gait. In addition, another proto-
col of the dataset was released that has up-slope and
down-slope data for 495 subjects. However, in this
paper, we consider only level walk data in order to
be used in transfer learning (cross-testing) with other
datasets. The total number of samples for level walk
only is 1, 488 samples. We obtained the permission to
use this dataset in our research by a signed agreement
from EJUST university to Osaka university.
3.3 Gait Events DataSet (GEDS)
The Gait Events DataSet (GEDS) (Miraldo et al.,
2020) is a publicly open dataset which was collected
using six wireless sensors. Four of them produce ac-
celerometer and gyroscope signals with other modal-
ities, and two of them are force-sensitive resistor
(FSR) sensors. In this paper, we work with the data
captured from the sensors placed at the tibialis ante-
rior muscles in the right and left legs which are named
(TaR) and (TaL), and the sensors placed over the tibia
bones at the right and the left legs which are named
(TbR) and (TbL). The number of subjects who partic-
ipated in collecting the dataset is 22 (10 males and
12 females) including one female with a foot drop
gait abnormality. The ages of the subjects range from
18 years to 50 years. The dataset contains a total of
9, 661 gait strides. It also contains gait data corre-
sponding to 3 different speeds: slow walk, fast walk,
and comfortable walk. In this work we consider the
comfortable gait style.
3.4 Human Gait Database (HuGaDB)
The Human Gait Database (HuGaDB) (Chereshnev
and Kert
´
esz-Farkas, 2017) consists of recordings for
12 human activities such as walking, running, sitting,
standing and so on. The dataset was collected us-
ing six IMU sensors that produce accelerometer and
gyroscope signals in addition to two electromyogra-
phy (EMG) sensors. The IMU sensors were located
at the right and left thighs, shins, and feet. Eighteen
healthy subjects participated in collecting the dataset
(14 males and 4 females), their ages range from 18 to
35 years. The sampling rate of the dataset is 56.35Hz.
The total records of the data equaled 10 hours, then
the dataset was segmented and annotated. In this
work, we consider only the walking activity data and
the IMU sensors.
4 PROPOSED SCHEME
We now describe our proposed methodology to build
a reliable age and gender recognition system. Figure 2
illustrates the stages of our proposed methodology.
We begin by loading the IMU data consisting of triax-
ial accelerometer (accelerometer-X, accelerometer-Y,
accelerometer-Z) and triaxial gyroscope (gyroscope-
X, gyroscope-Y, and gyroscope-Z). The data pre-
processing stage and feature extraction methods are
the same in both gender classification and age regres-
sion. After the feature extraction phase, we feed the
feature vector to either a classifier for learning to clas-
sify gender, or to a regressor to learn to estimate age.
4.1 Feature Modeling
To be able to extract useful information out of our raw
data, we propose to first apply a statistical method in
the data preprocessing stage. One of the most use-
ful statistical properties in the analysis of timeseries
is the autocorrelation function. The autocorrelation
function is a measure of similarity among the signal
BioDeep: A Deep Learning System for IMU-based Human Biometrics Recognition
623
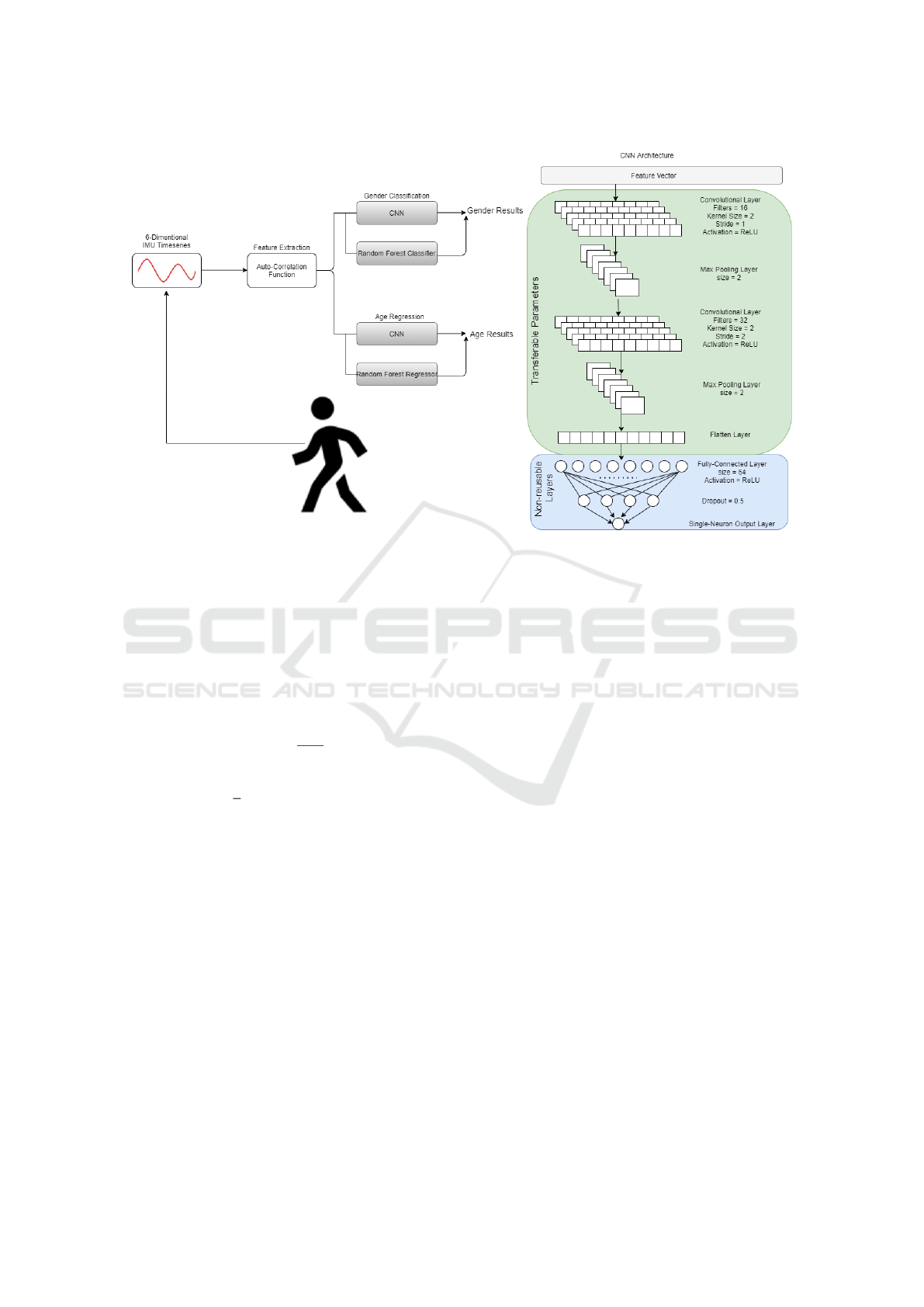
Figure 2: Proposed BioDeep System Architecture.
and time-shifted versions of itself. It is particularly
useful in the analysis of signals to find the repeated
patterns such as gait data in our case as the motion is
repeated periodically. We calculate the autocorrela-
tion function acf for each sensory signal up to a cer-
tain lag which is specified by experiments. The sam-
ple autocorrelation function is calculated as indicated
in Equations (1) and (2).
ac f (h) =
γ(h)
γ(0)
(1)
γ(h) =
1
n
n−h
∑
t=1
(x
t+h
− ¯x)(x
t
− ¯x) (2)
Where ¯x corresponds to the sample mean, n represents
the signal length, and h is the lag (Gomaa et al., 2017).
The output of the autocorrelation function is a vector
of length (6 x number of lags) as we have 6-axes sig-
nals. This vector is then considered the feature vector
to be fed to a classifier or a regressor. Another benefit
of using the autocorrelation function is dimensional-
ity reduction. At the beginning, our data consists of
6-dimensional timeseries. If we take EJUST-GINR-1
dataset as an example, each sample has 250 sequential
data points which result in dimensions of (6x250) for
each gait sample. However, after applying the auto-
correlation function, it results in a dramatic reduction
in the dimension. From the previous analysis, acf is
best suitable for modeling the features of our data.
4.2 Age Estimation
In this work, we consider age estimation as a regres-
sion problem to approximately estimate the exact age
of a person. A supervised machine learning approach
is employed as all of the considered datasets provide
age information attached to the gait signals. We fix
the feature vector as the output of the autocorrelation
function; after that, we feed this feature vector to a
regressor. We first try simple machine learning tech-
nique such as a random forest regressor, then we go
for the deep learning approach in which we use Con-
volutional Neural Network (CNN).
Random Forest is a well-known robust method
in machine learning. As shown in (Mehrang et al.,
2018), (Feng et al., 2015), (Mostafa et al., 2020),
and (Casale et al., 2011), random forest has proven
to be very promising applied to the analysis of IMU
signals. Random forest has such power because it re-
lies on ensemble learning, which means that not only
one big model is created to analyze the features of
the given dataset, but many different smaller models
are created using decision trees. Furthermore, each
model of those not only uses a subset of the data but
also performs random feature selection so as to reduce
the variance of prediction and hence increase accu-
racy (Mostafa et al., 2020). Here, we apply a random
forest technique for doing regression on the age with
model specifications illustrated in section 5.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
624

Another method we use here for regression is
CNN. The reason for that is because we want to make
use of the power of deep learning for solving this su-
pervised learning problem and compare its results to
the results of a traditional method such as random
forest. CNNs are known to be good at solving ma-
chine learning problems based on multi-dimensional
data. In our work, we construct the network shown in
Figure 2. The input to the first convolutional layer
is the feature matrix resulted from the autocorrela-
tion function which is considered six channels cor-
responding to the six timeseries autocorrelation func-
tions. The network is composed of 2 convolutional
layers in order to create the feature maps for age and
each one is followed by a max pooling layer to cre-
ate a summarized version of those feature maps. Fol-
lowing that, we flatten the output of the second max
pooling layer then feed it to a fully-connected layer.
Consequently, we add a dropout layer for regulariza-
tion to prevent overfitting and to boost the computa-
tional performance by minimizing the large number
of learning parameters caused by the fully-connected
layer. Finally, the output layer consists of one neu-
ron that will be produce the prediction for the age.
More specification about the model hyperparameters
are provided in section 5.
4.3 Gender Recognition
Gender recognition is considered a binary classifica-
tion problem. We use the same scheme proposed for
age regression as illustrated in Figure 2 except for the
activation function in the output layer of the CNN and
the loss function for estimating the error.
4.4 Transfer Learning
Transfer learning is a machine learning paradigm
which has proved to be very effective recently. It
means that the model which had previously learned
on a specific task can be reused as a starting point to
learn another semi-similar task which means that the
learning time for the latter task will be reduced sig-
nificantly. In this context, we apply transfer learn-
ing among the four previously mentioned datasets.
First, we train the CNN architecture shown in Fig-
ure 2. The top layers which are highlighted in green,
that include the convolutional and max pooling lay-
ers, learn the features of the input by creating the cor-
responding feature maps. Consequently, the bottom
layers which are highlighted in blue in Figure 2 are
then used to classify the gender or estimate the age ac-
cording to the application at that experiment (keeping
in mind that the activation function at the last layer
and the loss function will be different in regression
as illustrated in the model specification in section 5).
The same pretrained top layers are taken after train-
ing on one dataset with the same parameters, then
we attach to them new bottom layers and do fine-
tuning with this new model on another dataset. We
call this “cross-testing” The fine-tuning process is not
like training the network from scratch. In fine-tuning,
we train the model for 2 or 3 epochs only to capture
the features of the new dataset. Afterwards, we eval-
uate the model on the test samples from the second
dataset which the model haven’t seen before.
5 EXPERIMENTAL SETUP
To evaluate the effectiveness of our proposed method-
ology, we apply our model over the four previously
mentioned datasets. Due to the variation among the
datasets, we establish a systematic protocol of our ex-
periments. In this section, we illustrate the specifi-
cations of those experiments. First, we calculate the
acf for all sensor data of each dataset. We take differ-
ent lag values up to 10. For each sample, we have 6-
dimensional signal: accelerometer-X, accelerometer-
Y, accelerometer-Z, gyroscope-X, gyroscope-Y, and
gyroscope-Z. So the resulted feature space is in R
66
.
We tried many lag values then chose the best value
that resulted in the highest accuracy which was 10.
Secondly, we train and test random forest and
CNN classification models on each dataset separately
for gender classification. Consequently, we train and
test random forest and CNN classification models on
each dataset separately for age regression. We run
these experiments on each sensor data to compare the
performance and to recognize which body parts best
provide age and gender information. After that, we
perform cross-testing, that is, we train the CNN clas-
sification model on one dataset then fine tune and test
on another dataset. We take the data from the same
sensor location in both datasets. We begin our training
on EJUST-GINR-1 dataset which includes the largest
number of sensor locations. We use the learned fea-
tures from the shin sensor in EJUST-GINR-1 (RC)
and transfer them to the data of taR sensor in GEDS
dataset. Similarly, we do the same on shin sensor in
HuGaDB which is (RS). The OU-ISIR dataset doesn’t
contain shin sensors, so we train on the waist sensor
data in EJUST-GINR-1 dataset and use the waist sen-
sor in OU-ISIR dataset. After that, we repeat these ex-
periments but with choosing another dataset for train-
ing so that we make a sort of cross testing among
the four datasets. Eventually, we compare the results
to those of random forest. Additionally, we perform
BioDeep: A Deep Learning System for IMU-based Human Biometrics Recognition
625

some timing evaluation experiments in order to ex-
plore the computational speed we gained by applying
transfer learning compared to training from scratch.
The experimental model specifications for the ran-
dom forest classifier are as follows: we set the number
of decision trees in the model to be 100 trees because
it is a suitable choice to give a fair result as random
forest takes the majority vote. We also use Gini index
as a measure of the split quality. We apply bootstrap
aggregation to select random subsets of the data and
random subsets of the feature set thus prevent over-
fitting. We run each experiment 10 times and write
down the average accuracy.
The CNN model specifications, shown in Fig-
ure 2, are as follows: The first convolutional layer has
16 filters with stride 1, the second convolutional layer
has 32 filters with stride 2 and the fully-connected
layer has 64 neurons. These parameters were selected
experimentally by applying a specific setup and eval-
uating the model performance then choosing the best
evaluated setup. All of the three layers use Rectified
Linear Unit (ReLU) as activation function whereas
the final single-neuron output layer uses sigmoid ac-
tivation in the case of gender classification and linear
activation in the case of age regression. We use Adam
optimizer and set the batch size to 10 samples. We
apply binary cross-entropy as a loss function in the
case of gender classification and mean absolute error
in the case of age regression. In addition, we scale
the values of the age to be from 0 to 1 in order to
have a better training process and faster convergence.
The code for all of these experiments was uploaded
on GitHub and available upon request.
6 RESULTS AND DISCUSSION
In this section, we include all the results achieved
by applying our methodology to the four mentioned
datasets. We firstly show the results of each sensor
in each dataset separately for age regression and gen-
der classification. Consequently, we show the results
of cross testing i.e., training on a sensor data of one
dataset then testing on the other datasets.
6.1 Results of Age Estimation
The results of applying our approach for age regres-
sion are shown in Figure 3. We refer to EJUST-
GINR-1 dataset sensors right cube as RC, left cube
as LC, left upper arm as LUA, right upper arm as
RUA, left hand as LH, and right hand as RH. For
HuGaDB dataset, there was some corrupted data, so
we consider the right-side sensors only and refer to
right foot as RF, right shin as RS, and right thigh
as RT. For the GEDS dataset, we evaluate the sen-
sors placed at the tibialis anterior muscles in the right
and left legs and refer to them as TaR and TaL, and
the sensors placed over the tibia bones at the right
and the left legs referred to as TbR and TbL. For the
OU-ISIR database, the data was extracted automati-
cally for the subjects using the center IMUZ placed on
waist. Age regression evaluation was done by mea-
suring the mean absolute error. For consistency, the
results shown were achieved by taking the age range
from range 15 to 35 years as this is the most com-
mon range of subjects’ ages in all the datasets and any
other data outside this age range is considered out-
liers. This means we consider in our evaluation all of
20 subjects of EJUST-GINR-1 dataset, all of 18 sub-
jects of HuGaDB, 19 subjects of GEDS, and 385 sub-
jects of OU-ISIR database. Figure 3 shows the results
of using autocorrelation function followed by random
forest regressor in blue and the results of CNN in or-
ange using the same autocorrelation function features
for each sensor in each dataset. This allows us to com-
pare between using a traditional machine learning ap-
proach (random forest) and deep learning. It also al-
lows us to determine which sensor location(s) can be
used best to estimate age.
The overall performance indicates that the mean
absolute error in age estimation for EJUST-GINR-1
dataset lies between 1.9 for the LH sensor and 2.37
for the LUA sensor in the case of using random for-
est, and lies between 0.88 for the RC sensor and 1.8
for the RH sensor in the case of using CNN. For
HuGaDB, the mean absolute error lies between 1.38
for the RF sensor and 1.57 for the RT sensor in the
case of using random forest, and lies between 0.835
for the RS sensor and 0.93 for the RT sensor in the
case of using CNN. For GEDS, the mean absolute er-
ror lies between 2.2 for the TbR sensor and 2.29 for
the TaL sensor in the case of using random forest, and
lies between 1.3 for the TbR sensor and 2.37 for the
TaL sensor in the case of using CNN. For OU-ISIR
database, the result achieved using random forest was
3.99 and 4.28 using CNN.
From these results, we can observe that CNN per-
formed better than random forest in most of the cases
maybe this is due to the fact that CNN convolutional
filters can capture more complex features such that in
the case of mapping the gait signal to the correspond-
ing subject’s age. The results also show that lower
sensor locations on the body result in better age esti-
mation. That’s reasonable as most of gait patterns can
be featured from leg sensors.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
626
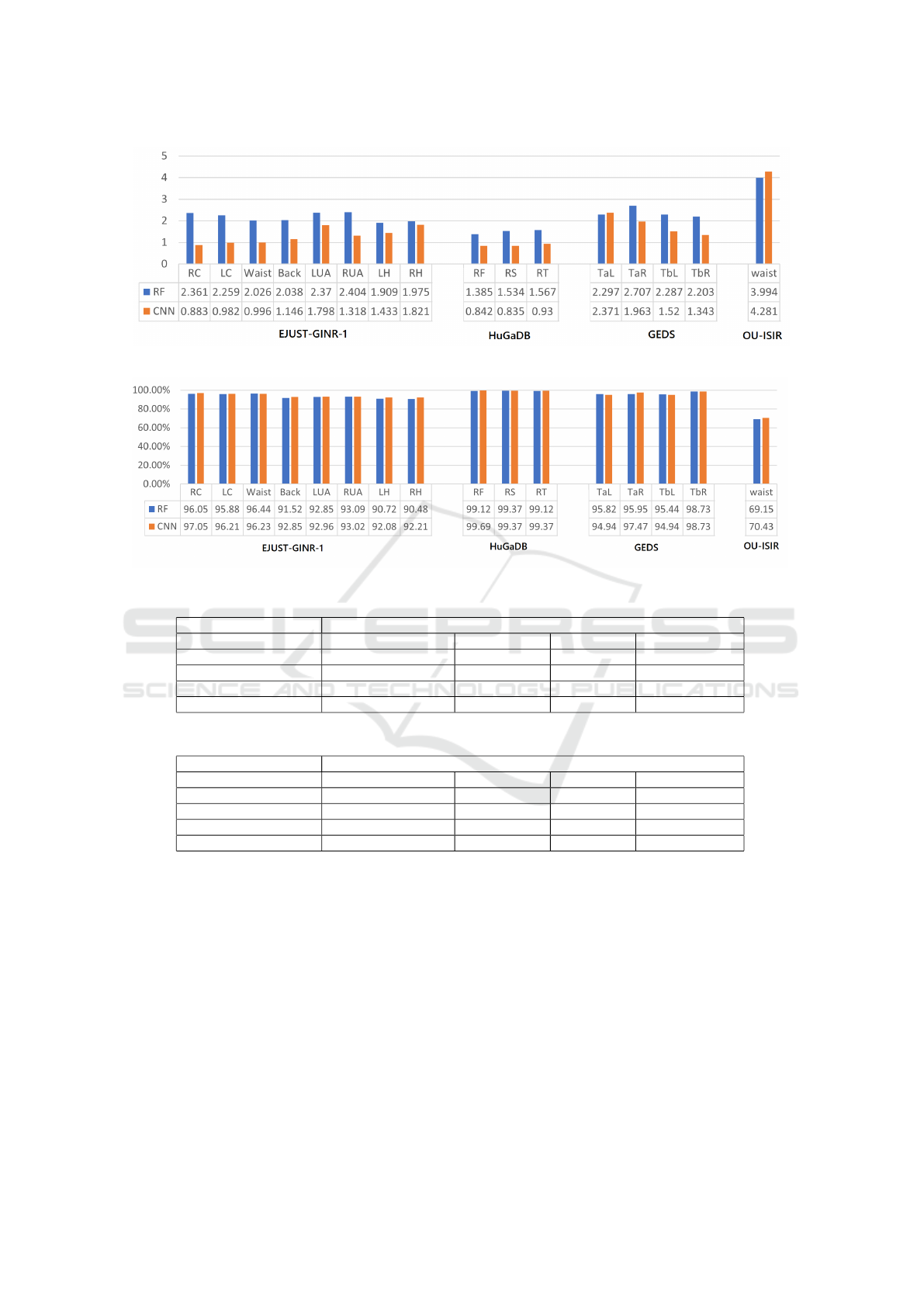
Figure 3: Age regression results for each dataset evaluated in mean absolute error.
Figure 4: Gender classification results for each dataset evaluated in percentage accuracy.
Table 1: Results of cross-testing in age regression evaluated in mean absolute error.
Training Dataset Testing Dataset
EJUST-GINR-1(RC) HuGaDB(RS) GEDS(TaR) OU-ISIR(Waist)
EJUST-GINR-1(RC) 0.883 2.0 2.5982 NA
HuGaDB(RS) 2.5685 0.835 3.6507 NA
GEDS(TaR) 2.232 2.19 1.963 NA
EJUST-GINR-1(Waist) NA NA NA 5.1209
Table 2: Results of cross-testing in gender classification evaluated in percentage accuracy.
Training Dataset Testing Dataset
EJUST-GINR-1(RC) HuGaDB(RS) GEDS(TaR) OU-ISIR(Waist)
EJUST-GINR-1(RC) 97.05% 98.13% 96.56% NA
HuGaDB(RS) 95.58% 99.37% 96.2% NA
GEDS(TaR) 95.9% 98.03% 97.47% NA
EJUST-GINR-1(Waist) NA NA NA 67.93%
6.2 Results of Gender Classification
The results of applying our approach in gender clas-
sification are shown in Figure 4. We use the same ab-
breviations mentioned in the previous subsection. Our
metric for evaluation here is the classification percent-
age accuracy.
In Figure 4, we can see that the overall per-
formance for EJUST-GINR-1 dataset lies between
90.48% for the RH sensor and 96.44% for the waist
sensor in the case of using random forest, and lies be-
tween 92.08% for the LH sensor and 97.05% for the
RC sensor in the case of using CNN. For HuGaDB,
the classification accuracy lies between 99.1% for the
RF and RT sensors and 99.37% for the RS sensor
in the case of using random forest, and lies between
99.37% for the RS and RT sensors and 99.69% for the
RF sensor in the case of using CNN. For GEDS, the
classification accuracy lies between 95.44% for the
TbL sensor and 98.37% for the TbR sensor in the case
of using random forest, and lies between 94.94% for
the TbL and TaL sensors and 98.73% for the TaR sen-
sor in the case of using CNN. For OU-ISIR database,
the result achieved using random forest was 69.15%
and 70.43% using CNN. from these results, we can
observe that CNN had a slight improvement in per-
formance compared to random forest.
BioDeep: A Deep Learning System for IMU-based Human Biometrics Recognition
627

6.3 Cross-testing
The results of applying transfer learning, for cross-
testing, in age regression are shown in Table 1. The
diagonal elements represent training and testing over
the same dataset, so their results are considered the
baseline for our experimental comparisons. The off-
diagonal elements represent the results of transfer
learning across different datasets. For example, the
first row shows the results of training on EJUST-
GINR-1 RC sensor and testing on other datasets with
the same sensor location. In the last row, we used the
waist sensor in EJUST-GINR-1 datast to train, then
test on OU-ISIR dataset. The overall average loss in
performance in the case of transfer learning is 1.2 in
mean absolute error compared to training and test-
ing on the same dataset, however, when measuring
the training time for each, transfer learning provided
20 − 30x speedup in the training time compared to
training from scratch. The training was performed
on the Nvidia GeForce GTX 1650 GPU with 4GB
of memory. The same conventions are applied in Ta-
ble 2 to show the results of applying transfer learning
in gender classification evaluated in percentage accu-
racy. The overall average accuracy loss is 1.4% in
the case of transfer learning compared to the case of
training and testing on the same dataset, however, we
also achieved 20 − 30x speedup in the training time
for gender classification.
It can be observed that EJUST-GINR-1 dataset
consistently has the highest transfer learning accuracy
in gender classification and age regression. This can
be due to the fact that it consists of long sequences of
gait signals and a balanced age and gender distribu-
tion over the participated subjects causing the convo-
lutional filters of the CNN to efficiently model the fea-
tures. Additionally, it can be observed that although
OU-ISIR dataset has the largest number of subjects,
the results achieved by using it for testing have the
largest error in age regression and poorest accuracy
in gender classification. Our reasoning for this is that
the dataset contains two gait sequences for each sub-
ject and each sequence consists of only a few seconds
which may not be enough for capturing the gender
and age pattern features for each subject.
7 CONCLUSION
In this work, we proposed a novel scheme for age and
gender recognition using IMU gait signals. Our de-
sign begins by applying the autocorrelation function
on the triaxical accelerometer and triaxical gyroscope
timeseries for feature modeling. Consequently, we
investigated, using two machine learning techniques
random forest and CNN for age regression and gen-
der classification. Furthermore, we applied transfer
learning among datasets to reduce the training time
and validate our model generalizability. We train the
CNN on one dataset then fine-tune and test on other
datasets. We used four publicly available datasets:
EJUST-GINR-1, OU-ISIR, GEDS, and HuGaDB.
The results obtained from our experimental eval-
uation indicate that our proposed methodology yields
a good performance in both age regression and gen-
der classification. In addition, the transfer learning
experiments yielded outstanding results compared to
the baseline CNN-based models trained from scratch.
The cross-testing average loss in performance was
1.2 in mean absolute error compared to networks that
were trained from scratch in the case of age regression
and 1.4% loss in classification accuracy in the case of
gender classification. The speedup gained by trans-
fer learning reached 20 − 30x in the training time. We
believe these results should open the way in using pre-
trained models for age and gender recognition using
IMU timeseries the same way pretrained models are
used nowadays in computer vision.
In the future, we intend to extend this work to in-
vestigate other various human activities such as sit-
ting, climbing stairs, running, etc. We may also anal-
yse electroencephalogram (EEG) signals to do age
and gender recognition based on brain signals.
ACKNOWLEDGMENTS
This work is funded by the Information Technol-
ogy Industry Development Agency (ITIDA), Infor-
mation Technology Academia Collaboration (ITAC)
Program, Egypt – Grant Number (ARP2020.R29.2
- VCOACH: Virtual Coaching for Indoors and Out-
doors Sporting).
REFERENCES
Abdu-Aguye, M. G. and Gomaa, W. (2019). Versatl: Ver-
satile transfer learning for imu-based activity recogni-
tion using convolutional neural networks. In ICINCO
(1), pages 507–516.
Adel, O., Nafea, Y., Hesham, A., and Gomaa, W. (2020).
Gait-based person identification using multiple iner-
tial sensors.
Albuquerque, L., Oliveira, C., Teixeira, A., and Figueiredo,
D. (2021). Eppur si muove: Formant dynamics is
relevant for the study of speech aging effects. 14th
BIOSIGNALS, Online.
Ashry, S., Ogawa, T., and Gomaa, W. (2020). Charm-deep:
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
628

Continuous human activity recognition model based
on deep neural network using imu sensors of smart-
watch. IEEE Sensors Journal, 20(15):8757–8770.
Casale, P., Pujol, O., and Radeva, P. (2011). Human activity
recognition from accelerometer data using a wearable
device. In Iberian Conference on Pattern Recognition
and Image Analysis, pages 289–296. Springer.
Chereshnev, R. and Kert
´
esz-Farkas, A. (2017). Hugadb:
Human gait database for activity recognition from
wearable inertial sensor networks. In International
Conference on Analysis of Images, Social Networks
and Texts, pages 131–141. Springer.
Du, X., Farrahi, K., and Niranjan, M. (2019). Trans-
fer learning across human activities using a cascade
neural network architecture. In Proceedings of the
23rd international symposium on wearable comput-
ers, pages 35–44.
Feng, Z., Mo, L., and Li, M. (2015). A random forest-based
ensemble method for activity recognition. In 2015
37th Annual International Conference of the IEEE En-
gineering in Medicine and Biology Society (EMBC),
pages 5074–5077. IEEE.
Fu, Z., He, X., Wang, E., Huo, J., Huang, J., and Wu,
D. (2021). Personalized human activity recogni-
tion based on integrated wearable sensor and transfer
learning. Sensors, 21(3):885.
Garofalo, G., Argones R
´
ua, E., Preuveneers, D., Joosen, W.,
et al. (2019). A systematic comparison of age and gen-
der prediction on imu sensor-based gait traces. Sen-
sors, 19(13):2945.
Gomaa, W., Elbasiony, R., and Ashry, S. (2017). Adl
classification based on autocorrelation function of
inertial signals. In 2017 16th IEEE International
Conference on Machine Learning and Applications
(ICMLA), pages 833–837.
Jain, A. and Kanhangad, V. (2016). Investigating gen-
der recognition in smartphones using accelerometer
and gyroscope sensor readings. In 2016 International
Conference on Computational Techniques in Infor-
mation and Communication Technologies (ICCTICT),
pages 597–602.
Markitantov, M. (2020). Transfer learning in speaker’s age
and gender recognition. In Karpov, A. and Potapova,
R., editors, Speech and Computer, pages 326–335,
Cham. Springer International Publishing.
Mehrang, S., Pietil
¨
a, J., and Korhonen, I. (2018). An activ-
ity recognition framework deploying the random for-
est classifier and a single optical heart rate monitor-
ing and triaxial accelerometer wrist-band. Sensors,
18(2):613.
Miraldo, D., Watanabe, R., and Duarte, M. (2020). An open
dataset of inertial, magnetic, foot-ground contact, and
electromyographic signals from wearable sensors dur-
ing walking.
Mostafa, A., Barghash, T. O., Assaf, A. A.-S., and Go-
maa, W. (2020). Multi-sensor gait analysis for gender
recognition.
Ngo, T. T., Ahad, M. A. R., Antar, A. D., Ahmed, M., Mura-
matsu, D., Makihara, Y., Yagi, Y., Inoue, S., Hossain,
T., and Hattori, Y. (2019). Ou-isir wearable sensor-
based gait challenge: Age and gender. In Proceedings
of the 12th IAPR International Conference on Biomet-
rics, ICB.
Ngo, T. T., Makihara, Y., Nagahara, H., Mukaigawa, Y.,
and Yagi, Y. (2014). The largest inertial sensor-
based gait database and performance evaluation of
gait-based personal authentication. Pattern Recogni-
tion, 47(1):228–237.
Riaz, Q., V
¨
ogele, A., Kr
¨
uger, B., and Weber, A. (2015). One
small step for a man: Estimation of gender, age and
height from recordings of one step by a single inertial
sensor. Sensors, 15(12):31999–32019.
Rosli, N. A. I. M., Rahman, M. A. A., Balakrishnan, M.,
Komeda, T., Mazlan, S. A., and Zamzuri, H. (2017).
Improved gender recognition during stepping activity
for rehab application using the combinatorial fusion
approach of emg and hrv. Applied Sciences, 7(4):348.
Sun, M., Li, C., and Zha, H. (2017). Inferring private de-
mographics of new users in recommender systems. In
Proceedings of the 20th ACM International Confer-
ence on Modelling, Analysis and Simulation of Wire-
less and Mobile Systems, pages 237–244.
BioDeep: A Deep Learning System for IMU-based Human Biometrics Recognition
629
