
Mixed Discrete-Continuous Simulation for Digital Twins
Neha Karanjkar
1 a
and Subodh M. Joshi
2 b
1
Indian Institute of Technology Goa, India
2
Department of Computational and Data Sciences, Indian Institute of Science, Bangalore, India
Keywords:
Digital Twins, Mixed Discrete-Continuous Simulation, Python, SimPy.
Abstract:
The advent of Digital Twins has precipitated the need for an open and flexible simulation framework with
unique design considerations. A key requirement of such a framework is the ability to simulate systems con-
taining a mix of discrete and continuous processes that may interact with each other. In this paper, we propose
a framework for mixed discrete-continuous simulations particularly targeted for Digital Twin applications.
The framework is based on SimPy, a popular discrete-event simulation library in Python. We first present
a systematic approach by which continuous process simulations can be integrated within the event-stepped
engine of SimPy. We illustrate the approach using an example. We then discuss the features of the proposed
framework and the roadmap for its implementation.
1 INTRODUCTION
The emergence of Digital Twins is set to transform
manufacturing, healthcare, urban planning, trans-
portation and many other sectors by aiding monitor-
ing and real-time decision making using Internet of
Things (IoT) technology and real-time analytics. A
Digital Twin refers to a digital representation (com-
puter model) of the real system that is continuously
kept in sync with the real system using periodic sens-
ing of its health parameters and incorporates analyt-
ics for prediction, optimization and control of the real
system. It is to be noted that the term ‘Digital Twin’
implies a two-way flow of information between the
real entity and its digital representation (viz. sensing
and control) and is distinct from a ‘digital model’ or
a ‘digital shadow’ which generally imply a one-way
information flow from the real system to its model. A
taxonomy of Digital Twins and a detailed discussion
of their engineering aspects are presented in (Fuller
et al., 2020).
Simulation is a key aspect of Digital Twins. A
summary of challenges and desired capabilities as-
sociated with the simulation of Digital Twins is pre-
sented in (Shao et al., 2019). The design of a sim-
ulation framework for Digital Twins is driven by the
characteristics of the system to be modeled. While
a
https://orcid.org/0000-0003-3111-1435
b
https://orcid.org/0000-0002-9239-8866
some system models may necessitate a continuous
simulation framework (Aversano et al., 2020; Moli-
naro et al., 2021), a discrete-event simulation might
suffice for other kinds of Digital Twins (Agalianos
et al., 2020).
The focus of this paper is on open simulation
frameworks for creating Digital Twins in applica-
tion areas such as manufacturing and process con-
trol. In these applications, the phenomena to be mod-
eled are often a mix of discrete and continuous pro-
cesses. Thus the ability to perform mixed discrete-
continuous (MDC) simulations is a key requirement
for the framework. The other requirements for such a
simulation framework are as follows:
1. The ability to model heterogeneous systems con-
taining different kinds of continuous processes,
each possibly requiring a different numerical
method for its solution and/or different character-
istic time-step sizes.
2. Support for capturing the effect of periodic sensor
updates from the real system on the model’s state.
3. The ability to perform real-time simulation.
4. The framework should be open-source and flexi-
ble. It should be easy to integrate existing libraries
for enabling analytics and visualization (e.g. op-
timization, machine learning, data handling, sci-
entific computing and plotting libraries) into the
framework.
5. The language used by the framework should sup-
422
Karanjkar, N. and Joshi, S.
Mixed Discrete-Continuous Simulation for Digital Twins.
DOI: 10.5220/0010580804220429
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 422-429
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

port modular descriptions and the use of object
oriented features for modeling complex systems
with many interconnected components.
While there exist a number of frameworks that are
targeted separately for either continuous simulation
or discrete-event simulations, the requirement of sim-
ulating both discrete and continuous processes to-
gether, possibly interacting with each other, intro-
duces some challenges. Section 2 presents a brief re-
view of approaches and existing frameworks for con-
tinuous, discrete and hybrid simulation. A majority of
the existing frameworks for MDC simulations are ei-
ther commercial or domain-specific. OpenModelica
is a notable exception which offers an open simula-
tion environment based on a declarative modeling lan-
guage (Modelica) and a library of component models
for multi-domain simulation (Fritzson et al., 2020).
However, there still exists the need for a mixed
simulation framework that is written in a general-
purpose, object-oriented language which allows in-
tegration with existing continuous simulation frame-
works. Python is an attractive choice for implement-
ing such a framework because of its wide user base,
ease of use and the availability of a number of li-
braries for analytics and visualization. In this paper,
we present the outline for an open-source, Python-
based mixed simulation framework motivated by the
requirements listed above.
The proposed framework is based on SimPy,
a process-based discrete-event simulation library in
Python (SimPy-Team, 2020). Processes in SimPy are
implemented using Python’s generator functions and
can be used to model active components. The pro-
cesses are managed by an environment class, which
performs time advancement in an event-stepped man-
ner using a global event queue. The system to be mod-
eled can be described in Python using a few SimPy
constructs and does not require the user to learn a new
modeling language. SimPy also supports real-time
simulation. However, SimPy is designed for discrete-
event simulation and currently offers no features for
modeling continuous systems (SimPy-Team, 2020).
In this paper we present a systematic approach
for integrating continuous models into the event-
stepped simulation engine of SimPy for MDC sim-
ulations. The framework is particularly suited for
systems where the continuous entities are few and
loosely coupled and their interactions can be modeled
via events. We present the framework, illustrating its
key ideas using a simple example, and describe the
roadmap for its implementation.
The rest of the paper is organized as follows: in
the next section, we present a detailed review of ex-
isting approaches to continuous, discrete-event and
mixed simulations. In Section 3 we present some de-
sign considerations for simulation of MDC systems
and describe the proposed framework. The roadmap
for implementation is presented in Section 4.
2 A REVIEW OF SIMULATION
APPROACHES AND
FRAMEWORKS
Depending on the type of the system to be modeled,
simulation approaches can be broadly classified into
the following categories:
A. Continuous System Simulation.
Continuous systems are characterized by continuous
evolution of the state variables. A few examples
of such systems include transient heat conduction in
solids, fluid flows, acoustic wave propagation etc.
Under certain conditions, fundamentally discrete sys-
tems such as highway vehicle traffic can be mod-
eled as continuous processes, e.g. evolution of vehi-
cle density over time (Lighthill and Whitham, 1955;
Sreekumar et al., 2019). The mathematical models
used for describing the dynamics of such systems of-
ten take the form of ordinary/partial differential equa-
tions (O/PDE) or mixed differential-algebraic equa-
tions (DAE). Simulating continuous systems thus in-
volves solving the differential equations using suit-
able numerical schemes (such as the finite element
spatial discretization method) as well as the appro-
priate numerical time integrators. Time is advanced
in a regular manner using a step-size that is either
fixed, or adjusted dynamically over the course of a
simulation. A detailed description of continuous pro-
cesses and their simulation aspects can be found in
(LeVeque, 1990; Cellier and Kofman, 2006) and the
references therein. In practice, frameworks such as
FEniCS (Logg and Wells, 2010), Deal II (Bangerth
et al., 2016), OpenFOAM (Weller et al., 1998) are
used for continuous multiphysics simulations of com-
plex systems. Numerical techniques such as reduced
order models (ROM) (Chinesta et al., 2011; Feng,
2005) and Machine-Learning (ML) based metamod-
els (Simpson et al., 2001) may be used instead of the
high fidelity models to reduce the overall computing
cost.
B. Discrete-Event Simulation.
Discrete processes are characterized by changes in the
state of the system occurring only at discrete (count-
able) instants of time, referred to as events. Discrete-
event simulation is broadly divided into event-stepped
and cycle-stepped approaches. A detailed description
Mixed Discrete-Continuous Simulation for Digital Twins
423

of discrete-event simulation approaches can be found
in (Hill, 2007). Formalisms such as Discrete Event
System Specification (DEVS) and a subsequent gen-
eralization (GDEVS) have been proposed for specifi-
cation and simulation of discrete-event systems (Zei-
gler, 1989; Giambiasi et al., 2001). Agalianos et.
al. present an overview of issues and challenges
for discrete-event simulation in the context of Digi-
tal Twins (Agalianos et al., 2020). There exist sev-
eral proprietary as well as open source libraries and
softwares for discrete-event simulations. A review
of open source discrete simulation softwares is pre-
sented in (Dagkakis and Heavey, 2016).
C. Mixed Discrete-Continuous (MDC) Simulation.
Systems containing both discrete-event and contin-
uous processes require a hybrid simulation frame-
work. Kofman proposes a quantization based in-
tegration method for simulation of hybrid systems
(Kofman, 2004). Nutaro et. al. propose a split
system approach in which a-priori knowledge about
the discrete-continuous structural split in the model
can be used for performing efficient simulation (Nu-
taro et al., 2012). An approach called Discrete Rate
Simulation has been proposed for simulating linear
continuous models (such as constant-rate fluid flows)
within a discrete-event framework and implemented
in a commercial software (Damiron and Nastasi,
2008; Bechard and Cote, 2013). A detailed review
of various methodologies used for hybrid discrete-
continuous simulation frameworks is presented in (El-
dabi et al., 2019). In the following section, we present
some design considerations and implementation ap-
proaches for MDC simulation, and describe our pro-
posed framework.
3 FRAMEWORK
The system to be modeled can be thought of as a mix
of continuous and discrete entities that interact with
each other. An entity in this context is a collection
of state variables, methods and processes represent-
ing a particular object to be modeled in the system.
A discrete entity refers to a process whose state can
change only at discrete time instants (events). A con-
tinuous entity is an entity whose state may be consid-
ered to change continuously with time and may re-
quire continuous simulation/monitoring. The design
of a framework for simulation of such discrete and
continuous entities interacting with each other is es-
sentially driven by the following questions:
• How do we advance time?
• How do we simulate interactions between the dis-
crete and continuous entities?
These questions have been addressed by formal ap-
proaches proposed for hybrid simulations, for e.g.
(Nutaro et al., 2012). From an implementation per-
spective, the simulation approaches can be broadly
classified into two categories as summarized below
and illustrated in Figure 1.
(A) In the first approach, the advancement of time
is controlled by a single continuous simulation
framework. The events to be modeled are embed-
ded into the continuous simulation framework as
updates to the state variables or boundary condi-
tions during simulation. These updates may oc-
cur at pre-defined time-steps or whenever a certain
condition on the state variables is met (for exam-
ple, when the value of the state variable crosses
a particular threshold). The step-size for advanc-
ing time is determined by the stability considera-
tions of the numerical scheme used for continuous
simulation. If the required step-size differs across
multiple continuous entities in the system, the
smallest of the step-sizes needs to be used. Such
an approach is well suited for systems mainly con-
sisting of tightly coupled continuous entities.
(B) In the second approach, time advancement is han-
dled by an event-stepped discrete-event simula-
tion framework. Continuous solvers are embed-
ded into this framework for simulation of individ-
ual continuous entities. Interactions of a contin-
uous entity with other entities in the system are
modeled via events. This approach is well-suited
when the continuous entities in the system are few
and loosely coupled.
Approach A
Continuous Simulation
Framework
Embedded Discrete events
Approach B
Discrete-Event Framework
Continuous Entities
Continuous Simulation
Framework
Embedded Discrete Events
Global
Event queue
trigger
state-update
schedule wakeup
Figure 1: Two approaches to implementation of a MDC
simulation framework.
Approach (B) is particularly suited for simulation
of Digital Twins in manufacturing and process engi-
neering domains since the systems to be modeled are
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
424

heterogeneous, typically consisting of a larger num-
ber of discrete entities and a few continuous entities
that are loosely coupled and interact in well-defined
ways. We propose a MDC simulation framework
based on this approach and describe how the ques-
tions of time advancement and capturing interactions
between entities are addressed by our framework.
3.1 Proposed Framework
In the proposed framework for MDC simulation, the
advancement of time is performed using the event-
stepped engine of SimPy. A continuous entity is char-
acterized by its state variables, a state-update function
and a definition of events that serve as an interface be-
tween the continuous entity and the external world as
summarized in Figure 2. The state update function in
the continuous entity can serve as a wrapper for per-
forming updates via an external continuous solver.
●
state variables
●
state_update_function( t ){...}
●
events declaration
- perturbation events
- probe events
- output events
- wakeup events
●
behavior_process()
{
initialization
...
while True
{
wait for a perturbation/probe
or wakeup event to occur
---------------
●
update state
●
check if any output events
need to be triggered
●
schedule a wakeup event
}
}
Figure 2: Components of a continuous entity model.
The interactions between a continuous entity and the
rest of the system can be implemented via events that
serve as the entity’s interface. These events are of four
types:
1. Perturbation Event: An external event that may
affect the state/trajectory of the continuous entity.
2. Probe Event: An external event which involves
querying the state of the continuous entity and
thus necessitates updating its state upto a given
time.
3. Output Event: An event triggered by the con-
tinuous entity itself as a consequence of its state
update which may affect other entities in the sys-
tem.
4. Wakeup Event: An event scheduled by the con-
tinuous entity itself for performing state updates
after a fixed time step or for creating output events
whose time of occurrence can be predicted in ad-
vance.
The behaviour of the continuous entity is modeled as
a SimPy process. This process is activated whenever
a perturbation, probe or a wakeup event for the entity
occurs. When activated,
1. The state updates for the entity upto the current
time are computed.
2. If any condition for triggering output events is
met, the output events are triggered
3. The continuous entity schedules a wakeup event
for itself after a particular time interval. This time
interval is determined as follows:
• (a) If the current trajectory of the state values
in the entitity is known, and if all of the output
events can be predicted ahead of time based on
this trajectory, the wakeup can simply be sched-
uled at the time the earliest output event is pre-
dicted to occur.
• (b) If all of the output events cannot be pre-
dicted ahead of time, the state needs to be up-
dated after fixed number of time steps (possi-
bly on each time step) by scheduling a wakeup
event periodically.
At each iteration of the event-stepped algorithm of
SimPy, the simulation time is advanced to the times-
tamp of the earliest scheduled event in the global
event list. All events scheduled to occur at this time
are executed and the processes waiting on this event
are triggered using callbacks.
3.1.1 An Improved Scheme for Time
Advancement
One issue with the presented approach is that if the
time step size for the continuous simulation is very
small relative to the typical time between events in
the rest of the system, the cost of adding a wakeup
event to the global event list after every time-step can
be prohibitive. To address this, we propose a modifi-
cation as follows:
At each iteration (K) of the event-stepped algo-
rithm, the tentative time-step (∆
K
) is taken to be the
difference between the scheduled time of the next
event in the global event list (t
next event
) and the simu-
lation time for the current iteration(t
K
). Each contin-
uous entity is then asked to peek-ahead in time by a
total period of ∆
K
by executing its state-update equa-
tions. This can be done either using a single step of
size ∆
K
or by dividing this period into finer time-steps
Mixed Discrete-Continuous Simulation for Digital Twins
425
as as dictated by the time marching scheme. The com-
putation of state updates for multiple continuous en-
tities can potentially be executed in parallel. If no
output events of interest are predicted to be gener-
ated by any of the continuous entities in this period,
the time can be advanced by ∆
K
and the computed
state-updates in each of the continuous entities can be
applied before proceeding to the next iteration. How-
ever, if it is found that for a continuous entity i, an
event of interest is generated at time t
i
< t
next event
,
then it may be possible that this event could affect the
state or trajectories of the other entities in the system.
Thus the actual time-step taken must be the one that
advances time to the earliest predicted event across
all of the continuous entities. That is, the simulation
time should be advanced to t
K+1
= min
i
(t
i
) in the next
iteration.
The earliest event predicted to occur at time t
K+1
can then be inserted into the global event-list, so that
its effect on other entities can be propagated as usual
in a discrete-event framework, and the state updates
in all of the continuous entities computed up to time
t
K+1
can be applied before advancing simulation time
to t
K+1
. A further optimization is to adaptively adjust
the tentative time step ∆
K
for improved performance.
A proof-of-concept implementation of this frame-
work has been completed and validated using exam-
ples. Here, we illustrate the key ideas of the frame-
work using a simple example and present the results
generated via simulation.
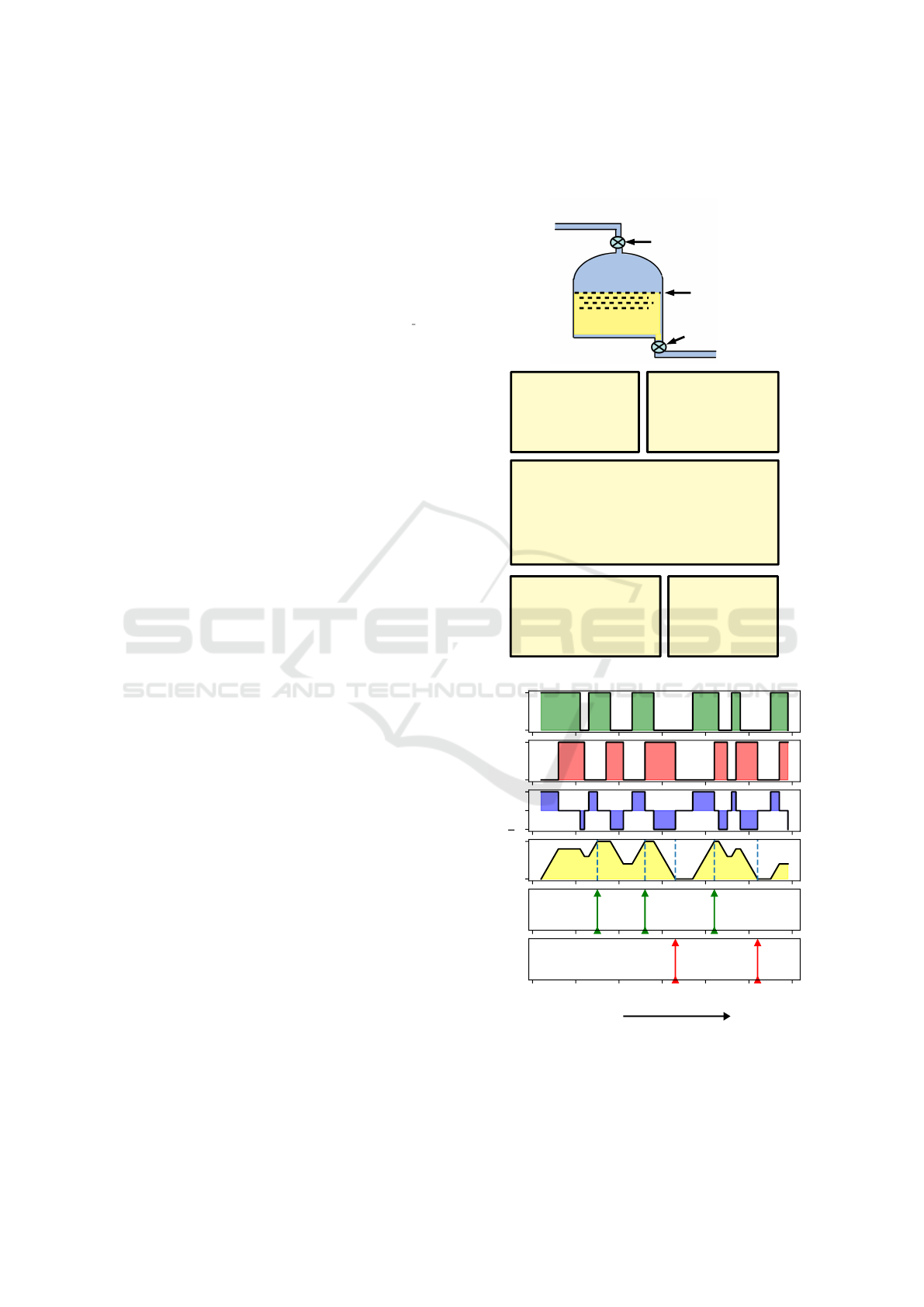
3.2 An Example
The essential idea of the proposed framework can be
illustrated using an example as follows: Suppose the
system to be modeled contains multiple fluid tanks
whose level is to be simulated and monitored con-
tinuously with respect to time. Each tank has an in-
let and an outlet valve that can be opened or closed
based on external triggers. The flow rate through the
inlet/outlet valves can be specified in units of length
per time and defined as the maximum change in tank
level per unit time when the corresponding valve is
open. The flow rates and the maximum level cor-
responding to the tank capacity can be assumed to
be fixed parameters for the tank. The interaction be-
tween the tank and other entities in the system can be
of two kinds: (a) The opening/closing of the valves
can be triggered by external processes and can affect
the time-trajectory of the tank level. (b) There are as-
sumed to be external processes in the system that are
affected whenever the level of the tank crosses a par-
ticular threshold (for example, whenever the tank be-
comes empty or full). These external processes need
to be notified whenever the empty/full conditions oc-
cur.
Inlet
valve
Outlet valve
level
●
net_inflow = (inlet_on * inflow_rate)
- (outlet_on * outflow_rate)
●
level (t + Δt) = level (t) + Δt * net_inflow
STATE EQUATIONS
●
max_level
●
inflow_rate
●
outflow_rate
PARAMETERS
●
level
●
inlet_on
●
outlet_on
STATE VARIABLES
TANK
●
tank_empty
●
tank_full
OUTPUT EVENTS
●
inlet_toggled
●
outlet_toggled
PERTURBATION EVENTS
Figure 3: Model of a fluid tank.
OFF
ON
inlet
OFF
ON
outlet
1
0
1
inow
0
5
level
FULL
0 10 20 30 40 50 60
EMPTY
TIME
Figure 4: Plots of the time evolution of the tank’s state
showing the empty/full events generated using the MDC
simulation framework.
To model this example in the proposed frame-
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
426

work, the tank can be considered a continuous en-
tity and described as a Python class. Objects of this
class can be instantiated to create multiple tank in-
stances in the system. The tank entity is characterized
by state variables, parameters, and state-update equa-
tions as summarized in Figure 3. The opening/closing
of valves correspond to perturbation events for the
tank and are triggered by an external process. When-
ever the tank becomes full/empty a corresponding
full/empty output event is triggered by the tank en-
tity. External processes that should be affected by
the full/empty events can be automatically notified
(by using the yield <event> construct of SimPy).
The entity also specifies a probe event which can be
triggered by external processes. When triggered, it
causes the tank state to be updated upto the current
time. The behavior of the tank is described as a SimPy
process as illustrated in Figure 2. Figure 4 presents
the time evolution of the tank’s states observed from
a simulation run of this example implemented using
our framework.
In this particular example, the state update equa-
tion is a simple linear algebraic equation and there-
fore an iterative time marching method is not neces-
sary for continuous state update. Implementing the
updates via plain Python code inside the state up-
date method in the tank class suffices and there is no
need for invoking an external solver. Further, the ex-
act time instants at which the empty/full events occur
can be predicted if the trajectory is not affected by ex-
ternal events. In such a case, the state updates need
to be computed only at wakeup events scheduled at
time instants when the output events are predicted to
occur. Between these time instants, the state trajec-
tory is completely known. In practice, many contin-
uous processes can in fact be replaced by a reduced
order surrogate models making the state trajectories
known ahead of time. Thus, a simple event-stepped
approach can lead to fast and efficient simulation. On
the other hand, if the state update equations require
iterative time integrators for their solution, it may not
be possible to predict the time instants at which out-
put events must occur. Thus, the wakeup events need
to be scheduled and the state updates applied periodi-
cally (after a fixed number of time-steps).
This example serves to describe the essential com-
ponents of the proposed framework. The implemen-
tation would consist of abstract classes to model con-
tinuous entities with an interface provided by the per-
turbation, probe and wakeup events, and modules for
integration with existing continuous solvers.
3.3 Strengths of the Proposed
Framework
Some reasons that make this approach particularly
suited for application to Digital Twins are as follows:
• The event-stepped approach can result in a more
efficient simulation for scenarios where only a few
kinds of events affect the trajectory of continuous
entities in the system.
• In this approach, it is possible for different contin-
uous entities in the system to use different contin-
uous solvers and internal time step-size values.
• The loose coupling between the continuous enti-
ties enables their parallel execution within a single
time-step for real-time simulation.
• For modeling entities where a high level of accu-
racy may not be necessary, coarse surrogate mod-
els can be used to predict the trajectory and time
of output events and schedule a wakeup ahead of
time.
• Sensor value updates from the real system can be
easily incorporated into the simulation as pertur-
bation events affecting the state.
4 ROADMAP
We discuss the features of the proposed framework
and a roadmap for its implementation along the fol-
lowing aspects:
1. Integration with Existing Continuous Simula-
tion Frameworks.
For fast simulation of continuous processes, in-
tegration with established continuous simulation
frameworks is necessary. We plan to use Dolfin
(Logg and Wells, 2010), a Python based finite-
element library for multiphysics modeling and
simulation to carry out continuous process sim-
ulations within our framework.
2. Incorporating Analytics.
For Digital Twin applications, analytics modules
need to be incorporated into the framework for
parameter extraction from sensor data, prediction,
optimization and for building surrogate models in
run-time.
3. Acceleration for Real-time Simulations.
The requirement for real-time simulation creates
a need for simulation acceleration that is possible
using hardware platforms such as GPGPUs, FP-
GAs or parallel execution on multi-core systems.
Mixed Discrete-Continuous Simulation for Digital Twins
427

We plan to explore architectures that can take ad-
vantage of these technologies for simulations.
4. Support for Sensing and Control.
Sensing and control are integral aspects of a Digi-
tal Twin. Features that support these aspects need
to be explored in detail and integrated into the
framework.
5 CONCLUSIONS
We propose a Python based framework for mixed
discrete-continuous simulations specifically targeted
for Digital Twins applications. The proposed frame-
work uses SimPy, a Python based discrete-event sim-
ulation framework for controlling time-advancement
and offers support for integrating existing libraries for
continuous process simulation. We present a system-
atic approach by which the continuous processes can
be embedded into the event-stepped discrete simula-
tion engine of SimPy and illustrate the structure of the
framework using an example. The ongoing work fo-
cuses on further development of the simulation frame-
work on several fronts including, but not limited to:
integration with existing continuous solvers, incorpo-
rating analytics, real-time simulation and an interface
for sensing and control.
REFERENCES
Agalianos, K., Ponis, S. T., Aretoulaki, E., Plakas, G., and
Efthymiou, O. (2020). Discrete Event Simulation and
Digital Twins: Review and Challenges for Logistics.
Procedia Manufacturing, 51(2019):1636–1641.
Aversano, G., Ferrarotti, M., and Parente, A. (2020). Digital
Twin of a Combustion Furnace Operating in Flame-
less Conditions: Reduced-Order Model Development
from CFD Simulations. Proceedings of the Combus-
tion Institute, 000:1–9.
Bangerth, W., Davydov, D., Heister, T., Heltai, L., Kan-
schat, G., Kronbichler, M., Maier, M., Turcksin, B.,
and Wells, D. (2016). The deal.II Library, Version
8.4. J. Numer. Math., 24:135–141.
Bechard, V. and Cote, N. (2013). Simulation of Mixed Dis-
crete and Continuous Systems: An Iron Ore Termi-
nal Example. In 2013 Winter Simulations Conference
(WSC), pages 1167–1178.
Cellier, F. E. and Kofman, E. (2006). Continuous System
Simulation. Springer-Verlag, US.
Chinesta, F., Ladeveze, P., and Cueto, E. (2011). A Short
Review on Model Order Reduction Based on Proper
Generalized Decomposition. Archives of computa-
tional methods in engineering, 18:395–404.
Dagkakis, G. and Heavey, C. (2016). A Review of Open
Source Discrete Event Simulation Software for Oper-
ations Research. Journal of Simulation, 10(3):193–
206.
Damiron, C. and Nastasi, A. (2008). Discrete Rate Simula-
tion Using Linear Programming. In Winter Simulation
Conference Proceedings, pages 740–749.
Eldabi, T., Tako, A. A., Bell, D., and Tolk, A. (2019). Tu-
torial on Means of Hybrid Simulation. Proceedings of
the 2019 Winter Simulation Conference, pages 273–
284.
Feng, L. (2005). Review of Model Order Reduction Meth-
ods for Numerical Simulation of Nonlinear Circuits.
Applied Mathematics and Computation, 167:576–
591.
Fritzson, P., Pop, A., Abdelhak, K., Ashgar, A., Bachmann,
B., Braun, W., Bouskela, D., Braun, R., Buffoni, L.,
Casella, F., Castro, R., Franke, R., Fritzson, D., Ge-
bremedhin, M., Heuermann, A., Lie, B., Mengist, A.,
Mikelsons, L., Moudgalya, K., Ochel, L., Palanisamy,
A., Ruge, V., Schamai, W., Sj
¨
olund, M., Thiele, B.,
Tinnerholm, J., and
¨
Ostlund, P. (2020). The Open-
Modelica Integrated Environment for Modeling, Sim-
ulation, and Model-Based Development. Modeling,
Identification and Control, 41(4):241–295.
Fuller, A., Fan, Z., Day, C., and Barlow, C. (2020). Digital
Twin: Enabling Technologies, Challenges and Open
Research. IEEE Access, 8:108952–108971.
Giambiasi, N., Escude, B., and Ghosh, S. (2001). GDEVS:
A Generalized Discrete Event Specification for Accu-
rate Modeling of Dynamic Systems. Proceedings -
5th International Symposium on Autonomous Decen-
tralized Systems, ISADS 2001, pages 464–469.
Hill, R. (2007). Discrete-Event Simulation: A First Course.
Journal of Simulation, 1(2):147–148.
Kofman, E. (2004). Discrete Event Simulation of Hy-
brid Systems. SIAM Journal on Scientific Computing,
25(5):1771–1797.
LeVeque, R. J. (1990). Numerical Methods for Conserva-
tion Laws. Birkhauser-Verlag, Basel.
Lighthill, M. J. and Whitham, G. B. (1955). On Kine-
matic Waves II. A Theory of Traffic Flows on Long
Crowded Roads. Proceedings of The Royal Society A,
229:317–345.
Logg, A. and Wells, G. N. (2010). DOLFIN: Automated
Finite Element Computing. ACM Trans. Math. Softw.,
37(2).
Molinaro, R., Singh, J. S., Catsoulis, S., Narayanan, C., and
Lakehal, D. (2021). Embedding Data Analytics and
CFD into the Digital Twin Concept. Computers and
Fluids, 214:104759.
Nutaro, J., Kuruganti, P. T., Protopopescu, V., and Shankar,
M. (2012). The Split System Approach to Managing
Time in Simulations of Hybrid Systems Having Con-
tinuous and Discrete Event Components. Simulation,
88(3):281–298.
Shao, G., Jain, S., Laroque, C., Lee, L. H., Lendermann, P.,
and Rose, O. (2019). Digital Twin for Smart Man-
ufacturing: The Simulation Aspect. Proceedings -
Winter Simulation Conference, 2019-Decem(Bolton
2016):2085–2098.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
428

Simpson, T. W., Peplinski, J. D., Koch, P. N., and Allen,
J. K. (2001). Metamodels for Computer-based Engi-
neering Design: Survey and Recommendations. En-
gineering with Computers, 17:129–150.
SimPy-Team (2020). Simpy: Discrete-
event simulation for python {Online
https://simpy.readthedocs.io/en/latest/}.
Sreekumar, M., Joshi, S. M., Chatterjee, A., and Mathew,
T. V. (2019). Analyses and Implications of Higher
Order Finite Volume Methods on First-Order Macro-
scopic Traffic Flow Models. Transportation Letters,
11:542–557.
Weller, H. G., Tabor, G., Jasak, H., and Fureby, C. (1998).
A Tensorial Approach to Computational Continuum
Mechanics Using Object-Oriented Techniques. Com-
puters in Physics, 12(6):620–631.
Zeigler, B. P. (1989). Devs Representation of Dynamical
Systems: Event-Based Intelligent Control. Proceed-
ings of the IEEE, 77(1):72–80.
Mixed Discrete-Continuous Simulation for Digital Twins
429
