
Automated Lane Change Decision Making in Highway using a Hybrid
Approach
Ozan C¸ aldıran
a
, Engin Baglayici
b
, Morteza Dousti
c
, Eren Mungan
d
, Enes Emre Bulut
e
,
M. Damla Demir
f
and Furkan Koc¸yi
˘
git
g
AVL Research and Engineering, Istanbul, Turkey
Keywords:
Autonomous Driving, Automated Lane Change, Decision-making, Utility Functions, Gap Selection, Highway
Autopilot.
Abstract:
This study proposes a decision-making model for lane changing and lane keeping decisions in highway au-
tonomous driving. In order to perform a safe and efficient lane change, it is crucial to decide whether a lane
change is needed, the desired lane is more suitable, and making a lane change maneuver is safe. In this work,
we propose a model that is capable of assessing these considerations and suggest appropriate lane-change
maneuvers. The model uses probabilistic utility functions and a deterministic but conservative gap selection
method that considers not only the gaps in the target lane but also the vehicles in the driving lane. In addition
to simulation tests, we integrated our model into a SUV vehicle that has 360-degree perception and motion
control capabilities and performed autonomous highway driving to test real-life performance.
1 INTRODUCTION
According to the EGM’s (General Directorate of Se-
curity of Turkey) most recent report, 87.7 percent of
the traffic accidents in Turkey are caused by driver
faults (EGM, 2020). Driving requires a constant fo-
cus on the environment and even a little focus loss
can cause accidents. Nevertheless, Advanced Driv-
ing Assist Systems (ADAS) and Autonomous Driv-
ing Modules take over the tasks of driving and re-
duces the accidents significantly. Moreover, they pro-
vide comfortable and efficient driving while guaran-
teeing safety. Therefore, autonomous driving has at-
tracted researchers and automotive companies in re-
cent years.
Recently, automobile manufacturers started offer-
ing ADAS features such as Adaptive Cruise Control
(ACC) and Lane Keeping Assist (LKA) that can as-
sist drivers in longitudinal and lateral maneuvers. Al-
though these features provide additional safety and
a
https://orcid.org/0000-0001-6544-0419
b
https://orcid.org/0000-0003-3901-4752
c
https://orcid.org/0000-0003-2528-6730
d
https://orcid.org/0000-0001-9637-5293
e
https://orcid.org/0000-0003-2022-2359
f
https://orcid.org/0000-0001-5816-7610
g
https://orcid.org/0000-0002-8743-3241
comfort for the passengers, more complex situations
and driving actions are either not addressed or ad-
dressed in a limited sense like lane-change maneuver.
To achieve automated lane change, a better under-
standing of the scene, decision-making, trajectory and
movement planning is required compared to simple
ADAS features already available such as lane change
warning systems.
Another challenge with the automated lane change
is the diverse traffic settings such as city-roads dur-
ing rush hour traffic, intersections, roundabouts, high-
ways, all of which pose different challenges and re-
quirements. It is hard to fulfill all lane change de-
cision requirements with one base model, therefore
researchers generally focus on a single traffic set-
ting to have smooth circumstances. Moreover, lane
change maneuvers are performed for different rea-
sons. Lane changes can be classified as mandatory,
discretionary, and anticipatory based on their reasons
to occur (Toledo, 2003). Mandatory lane changes de-
fine the situations where drivers must perform a lane
change due to strict road rules and situations, such as
lane endings or lane blockages. Discretionary lane
changes are performed by drivers when the observa-
tion indicates that, there is another lane with better
driving conditions for the host vehicle. Finally, an-
ticipatory lane changes are performed to improve the
Çaldıran, O., Baglayici, E., Dousti, M., Mungan, E., Bulut, E., Demir, M. and Koçyi
˘
git, F.
Automated Lane Change Decision Making in Highway using a Hybrid Approach.
DOI: 10.5220/0010581304770484
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 477-484
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
477

road conditions for other road actors, such as allowing
a faster vehicle to pass (Nilsson et al., 2016)
In this paper, an autonomous lane-change
decision-making model is presented for discretionary
lane changes in highway driving scenarios. The
model aims to determine when and how to execute a
lane-change under efficiency, safety, and comfort cri-
teria. The utility functions that are designed to meet
those criteria are provided in Section 3. The utility
functions and their effects on the decisions have been
evaluated and tuned based on simulations. After the
model have been finalized in the simulations, we de-
ployed the model on our development vehicle. We
also performed a highway autonomous driving test.
In the highway tests, we performed several traffic sce-
narios to observe model decisions. The simulation
and test results are presented in Section 4.2. The main
contributions of this paper: 1) establish an automated
lane change decision-making model based on deter-
mining feasible maneuvers; 2) propose a model that
selects the most appropriate maneuver using a multi-
variate utility function.
2 LITERATURE REVIEW
Different types of decision-making models have been
utilized for the autonomous lane change maneuvers,
and we will consider the following three categories of
models: (1) Microscopic traffic models and decision
trees, (2) Markov Decision Processes (MDPs), and (3)
Reinforcement learning. In this section, we will intro-
duce various implementations of these methods.
Gipps (1986) introduced a decision-making model
that covers various urban driving situations. The
model considers the necessity, desirability, and safety
of lane changes. Driver’s behavior is governed by two
basic considerations: maintaining the desired speed
and being in the correct lane for an intended turn-
ing maneuver. Ahmed (1999) proposed lane change
decision-making models based on utility functions to
model microscopic highway traffic scenarios. The
utility functions are linear combinations of certain
factors that evaluate a certain lane based on the safety,
comfort, and goal of the driver. The probability of
lane change was calculated based on the output of a
softmax function and the decisions of the drivers to
make lane changes were modeled using a decision
tree. Later, Toledo (2003) used the same modeling
approach to extend and improve Ahmed’s model.
Utility-based models have been used for decision-
making algorithms for lane changes on highways
(Ardelt et al., 2012; Nilsson et al., 2016). Ardelt
et al. (2012) integrated the ideas from Ahmed (1999)
and Toledo (2003), and implemented a decision tree-
based framework based on utilities of adjacent lanes,
on an actual car. In the first phase, utilities of the
lanes are computed with a decision tree mechanism.
If the utilities indicate that a lane-change maneuver is
profitable, the feasibility of this lane change is then
controlled. If the lane change maneuver is not fea-
sible, a lane change gap approach protocol, whose
details were not provided, is activated. The authors
use this decision-making model to drive from Munich
to Ingolstadt on highway A9 in German Autobahn.
Two major contributions of Ardelt et al. (2012)’s work
are the inclusion of the uncertainties in the utilities
based on sensor uncertainties and the inclusion of the
past and future values of the expected utilities in the
decision-making process.
Similarly, Nilsson et al. (2016) computed three
types of utilities of adjacent lanes and assessed the
quality of gaps for a lane change. The proposed
method does not consider cooperation between traf-
fic participants. However, the low complexity of the
method makes it traceable. Besides, the authors pro-
vided all the necessary definitions for the utilities and
gap assessment procedures. They also verified their
approach using both simulations and a real car on a
test track.
A drawback of these utility-based methods is their
limited capacity regarding the incorporation of the
other traffic participants actions and their possible ef-
fects on the decisions. In this regard, the Markov
Decision Process (MDP) and Partially Observable
Markov Decision Processes (PO-MDP) offer princi-
pled solutions to modeling and decision-making pro-
cesses. However, the implementation of MDPs or PO-
MDPs poses practical problems due to their computa-
tional complexity for real-time bound systems such as
autonomous cars.
For example, Brechtel (2015) outlines highway
driving scenarios as a generic Markov Decision Pro-
cess with continuous states and action spaces based
on the dynamics and inputs of a car. Nevertheless, the
authors devised a novel discretization method to fit
the states and actions into a solvable MDP formula-
tion. They used the MDP approach to solve highway
driving situations where partial observability is not as
critical (Brechtel et al., 2011). Later in Brechtel et al.
(2014), the authors proposed to use Partially Observ-
able MDPs (PO-MDPs) to account for the states that
cannot be directly observed during driving such as ve-
hicles that are occluded at intersections. Furthermore,
they used continuous observation space representa-
tions. The additional complexities from the contin-
uous observation space representation and partial ob-
servability are handled by limiting the relevant traffic
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
478

participants to two.
On the other hand, Ulbrich and Maurer (2013) in-
troduced a two-step algorithm to decrease the com-
plexity of POMDP for real-time decision-making.
The authors defined the state space of a POMDP
decision-maker in terms of three binary state variables
defining whether changing lanes is possible, benefi-
cial, and in progress. This approach, while reducing
the complexity of the problem, might result in over-
simplification of the problem. However, the authors
integrated their decision-making model on a car and
tested the system on Braunschewig’s inner-city ring
road.
With the advancements in learning-based ap-
proaches, researchers started to use machine learn-
ing and deep learning for situation assessment and
decision-making optimization. Researchers have
used these models to either tune parametric models
(utility functions, MDP, etc.) or used them directly as
decision-making mechanisms as in the case of rein-
forcement learning.
Even though the trial-error nature of reinforce-
ment learning seems infeasible in the case of real-
driving scenarios, training deep reinforcement learn-
ing agents through realistic driving simulators has
the potential to solve the decision-making problem
in autonomous driving. However, building a realis-
tic driving simulator is a challenge in itself. Nev-
ertheless, numerous research groups recently uti-
lized deep reinforcement learning: Mirchevska et al.
(2018); Alizadeh et al. (2019); Yavas et al. (2020)
all trained Deep Q-Network (DQN) agents for de-
ciding to perform lane-changes or keeping the lane;
Shi et al. (2019) proposed a hierarchical reinforce-
ment learning-based architecture to decide when to
change lanes and how to change lanes; Wang et al.
(2018) trained a Q-network agent that selects appro-
priate yaw rate from a continuous action space, thus
acting as a decision-maker coupled with a high-level
lateral controller.
All the presented approaches consider plans for
differing time horizons and detail. Therefore, the
choice of a suitable decision-maker should heavily
depend on the task in question and the properties of
the rest of the system at hand, i.e., the whole system
comprising an autonomous vehicle. In this work, we
consider normal highway driving where escape ma-
neuvers are not required. Hence, the task expected
from a decision-making module is to increase safety
and comfort while maintaining the desired speed.
Normal road driving conditions do not usually require
complex long-term planning, thus a lane change or
an overtaking maneuver can be considered separately
for escape maneuvers. Therefore, we chose to use a
utility-based method rather than more complex mod-
els like (PO)MDP. The first reason is the intuitive ap-
proach of utility functions regarding the assessment
of the driving conditions. On the other hand, it was
understood that the utility-based methods are quite
similar to the MDP-based methods regarding the sit-
uation assessment. The simplification of the MDP-
based methods due to their computational complex-
ity leads to this result. The major difference of the
utility-based method from (PO)MDP methods is that
the constant acceleration model is used to predict the
state of the highway actors over a time interval, which
means that future situations do not have an impact on
the current state. Despite this downside, the computa-
tional complexity of the autonomous driving problem
pushes researchers to simplify the state action domain
complexity, which ultimately weakens the robustness
of (PO)MDP solvers.
3 METHOD
3.1 Utility Functions
Highway driving requires continuous observation of
lane properties to decide which lane to keep driv-
ing on. Linear utility functions are utilized to as-
sess each driving lane according to its lane properties,
thus we can select the most appropriate lane among
them. Many factors are taken into account to evalu-
ate the lane properties include object velocities, rel-
ative positions, size of the objects, and many other
variables that affect the circumstances of the driving.
The considered driving factors form different combi-
nations of linear functions that specify different road
conditions. These road conditions can be the aver-
age time gap between objects, average longitudinal
velocity in a lane, lane line quality, presence of heavy
vehicles, and so on. These linear functions are then
weighted according to their effects on the traffic and
combined to calculate the utility value of a lane in a
specific time interval. By assigning weights to func-
tions, we prioritize some functions which have more
effects on driving than others. On the other hand, we
consider not only the present variables of the traffic
scene but also past and possible future states. We
discretize the time from past the future and calculate
the utilities of lanes that belong to specific time inter-
vals. We created a utility table to keep utility values
from past to future, and we update the table at each
time step with the incoming utilities. Instead of cal-
culating past lane utilities continuously, we keep past
utility values in memory. We also calculate future
utility values based on predicted environment vari-
Automated Lane Change Decision Making in Highway using a Hybrid Approach
479
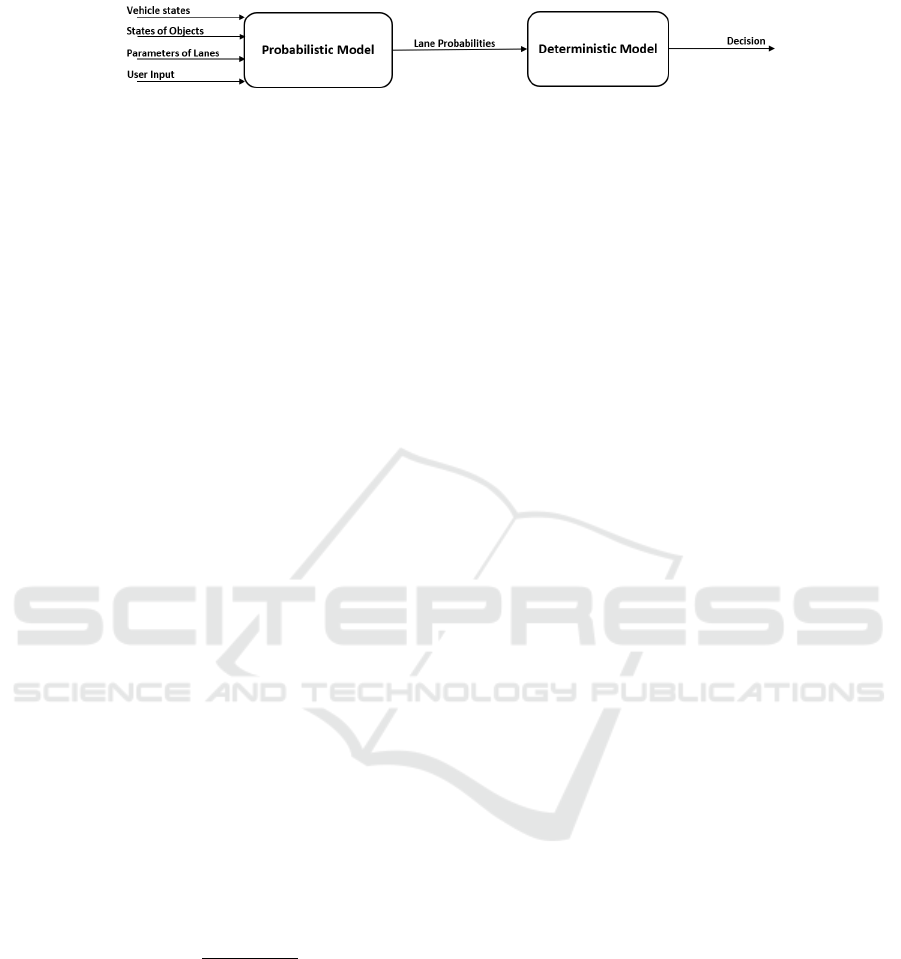
Figure 1: Decision Maker Model Architecture.
ables at every time step. For future state prediction,
we use linear future state estimator functions that cal-
culate possible future velocities and positions of dy-
namic objects. For this aim, any future state predic-
tion method can be used. When using past utility
values, resetting those values is essential if the road
situation suddenly changes Ardelt et al. (2012). We
also assign weights to each time interval according
to their effects on comfort and safety criteria. It is
important to note that the negative influence of the
past increases over time with the bad driving con-
ditions, which decreases the overall utility. Either
utility function weights or time interval weights are
determined empirically. Road properties have uncer-
tainties that arise from different sensor measurements.
To fully understand the driving situation, Ardelt et al.
(2012) includes uncertainty measures into utility cal-
culations by introducing road variables as probability
distributed stochastic variables. We also follow this
procedure to have a realistic observation of the driv-
ing scene. Among the mandatory, discretionary, and
anticipatory lane changes, we only consider discre-
tionary and anticipatory lane changes, for our utility
function model. Anticipating mandatory lane changes
requires local map information, and even though we
do not include it, for now, it can easily be integrated
later on. Hereby, we present the road factors which
are considered while building the utility function.
Longitudinal Velocity: The longitudinal velocity util-
ity represents the difference between the desired ve-
locity of ego and the actual velocity of ego. This fac-
tor includes a penalty effect with the right proportion
of the difference between the desired speed and the
actual speed of the ego.
Ulv = −
|V
des
−V
ego
|
V
des
(1)
In the formula, V
des
and V
ego
denotes the desired
longitudinal velocity and the current longitudinal ve-
locity, respectively. The formula indicates that the
minimum penalty effect is achieved by the equality
of V
des
and V
ego
.
Average Time Gap: The average time gap of a lane
represents the average of the time gaps between ve-
hicles in the corresponding lane. For the calculation,
the time gaps between longitudinally adjacent cars are
calculated and the average of these time gaps are used
as a utility factor.
Average Longitudinal/Lateral Velocity: These factors
denotes the average longitudinal and lateral velocities
in a specific lane. Based on the desired velocity of
ego, these factors can be used as hints to determine
which lane to keep.
Relative Leader Velocity: This factor denotes the
highest relative velocities in each lane. Even though it
is similar to the other velocity-related factors, know-
ing the fastest objects in lanes may help the driver
with the decision of keeping the current lane or not.
Presence of Heavy Vehicles: Presence of heavy ve-
hicles is an indicator of the inconvenient of a lane.
Lanes with heavy vehicles tend to be flowing slower,
which should not be preferred in a highway scenario.
Safety is another regard in this condition.
Lane Line Quality: Lane line quality is another im-
portant factor to determine about a lane. With the help
of a vision algorithm, having the information of line
quality gives us a hint about how healthy to keep a
lane.
Required Number of Lane Changes: Required num-
ber of lane changes to reach a lane is an impor-
tant factor regarding driving safety and comfort. We
should avoid targeting far lanes as much as possible
and choose adjacent lanes to be sure about safety and
comfort.
Presence of Tailgating: Tailgating is an undesirable
situation that can easily cause accidents. If a behind
vehicle is driving too closely, especially in the left-
most lane, the ego vehicle should make a lane change
to allow the vehicle to pass. By using the time gap in-
formation between ego and car from the behind, tail-
gating makes an inverse proportion effect to the utility
function. While ego drives in a tailgating situation,
the overall utility of the ego lane decreases over time.
Left/Right Most Lane Check: In highway, keeping the
left-most lane and right-most lane for a long time is
generally inhibited. Thus, keeping these lanes for de-
creases the utility of that lane over time.
The above utility factors are weighted by W ∈ [0, 1],
based on their importance level and summed up to
find total utility of a lane at a specific time.
U
lane
=
f
∑
n=1
W
n
U
n
(2)
For the overall utility calculation, we follow the
formulation in Ardelt et al. (2012). For each discrete
timestamp, we calculate the utilities of a lane from
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
480

past to future and get an overall utility value. Even
though past utilities are useful for a better assessment
of a traffic situation, they can imply wrong predictions
and slow down the utility process. Thus, resetting the
past utilities in case of significant changes in traffic
may lead to better assessment Ardelt et al. (2012). On
the other hand, in case of a constant unsatisfied traffic
situation on a lane, we expect the utility value of that
lane to decrease over time. By integrating the δ ∈ [-
1,0] parameter to the equation, we can manipulate the
past utilities by either resetting them to zero or give
a negative value. We finally plug the weights of each
timestamp β ∈ [0, 1] into the equation and calculate
the overall utility value of a lane between a time inter-
val. Each utility factor is calculated by the normally
distributed parameters (vehicle velocities, positions,
etc.) which also makes the factors a normally dis-
tributed variable U N(µ
U
,σ
U
). By using the overall
utility equation, we get a final normally distributed
lane utility value. We compare lane utilities based
on cumulative distribution functions. The difference
probability of two lanes (U
l1
−U
l2
) is a joint density
function, and integrating the joint density over the set
of points where U
l1
> U
l2
gives the probability that
U
l1
contains greater utility than U
l2
.
P(U
l1
> U
l2
) =
1
σ
Udi f f
√
2π
Z
0
−∞
(e
−(x−µ)
2
.
2σ
2
Ud i f f
)du
(3)
Finally, the host vehicle makes a lane change re-
quest if that probability exceeds a minimum thresh-
old value, which can also be determined empirically
according to comfort and safety criteria. The lane
change request is then examined by the Gap Selection
module.
3.2 Gap Selection
When a lane change decision is made, our gap se-
lection algorithm searches for inter-vehicular gaps
that comply with certain safety and comfort crite-
ria. To find the best gap, the decision-making mod-
ule requires the kinematic information of the vehicles
around the ego vehicle for the whole 360
◦
from the
environment perception modules.
The sensor fusion module, which is the core com-
ponent of the environment perception modules, uses
Kalman Filters to track the surrounding vehicles and
hence assumes a normal distribution for the uncer-
tainty in the estimated states of these vehicles. Our
gap selection algorithm considers both the estimated
kinematic states and their uncertainties for a feasi-
ble lane change as in Ardelt et al. (2012), i.e., the
rear/front bumper of a lead/follow vehicle is consid-
ered to be 3 standard deviations away from its es-
timated mean. Moreover, we considered clearances
∆
des
based on desired time gaps between the ego ve-
hicle and the surrounding vehicles. Adding these un-
certainties and the clearances, we defined safety re-
gions around each surrounding vehicle (see Fig. 2b).
When we refer to the distance between vehicles and
their closeness to one another, we consider the safety
margins instead of the actual vehicle positions.
Unlike Ardelt et al. (2012), our algorithm inspects
not only the vehicles in the target lane but also the
vehicles that are in front and back of the ego vehi-
cle Toledo (2003). In this regard, an inter-vehicular
gap is defined in terms of the longitudinally closest
lead and follow vehicles either in the target or ego
lane. For example, in Fig. 2 the longitudinal dis-
tance between the lead vehicle in the ego lane and
the lead vehicle in the left lane constitutes a gap. Our
approach saves us from checking collisions with the
vehicles in the ego lane which might occupy regions
through where a lane-change maneuver is planned to
take place. Hence, we only consider gaps that are
reachable.
Furthermore, we estimate the future positions of
the surrounding vehicles using a constant acceleration
model to predict the future states of the inter-vehicular
gaps. Therefore, we can anticipate feasible but un-
reachable gaps to be reachable in a certain time hori-
zon and plan accordingly.
Nevertheless, gaps that are expected to be reach-
able in the future are not guaranteed to be reachable
or feasible in the expected time horizon (see Fig. 2a
and 2b). Therefore, gaps that are temporally closer to
the current time frame are more desirable. Moreover,
aligning with a feasible gap might require a deviation
from the desired velocity, thus rendering the gap to
be less desirable. These criteria lead to another multi-
criteria selection problem among gaps. Similar to the
lane utility functions, we defined the following crite-
ria:
• U
to
: Time for the gap opening
• U
dur
: Duration of the gap feasibility
• U
tr
: Time to reach the gap
• U
ddv
: Difference to desired velocity,
and compared the weighted summation of these cri-
teria for all reachable and feasible gaps. Unlike the
lane utility functions case, gap utilities are not prob-
ability distributions since we opted for a conservative
assessment of the gaps and considered the state un-
certainties of the surrounding vehicles for worst-case
scenarios as in Ardelt et al. (2012).
Automated Lane Change Decision Making in Highway using a Hybrid Approach
481
Center of gap
Currently open gap
Currently closed/unreachable gap
Safety margin
Velocity vector
(a)
3
Uncertainty boundary of 3
Virtual car at the uncertainty boundary
(b)
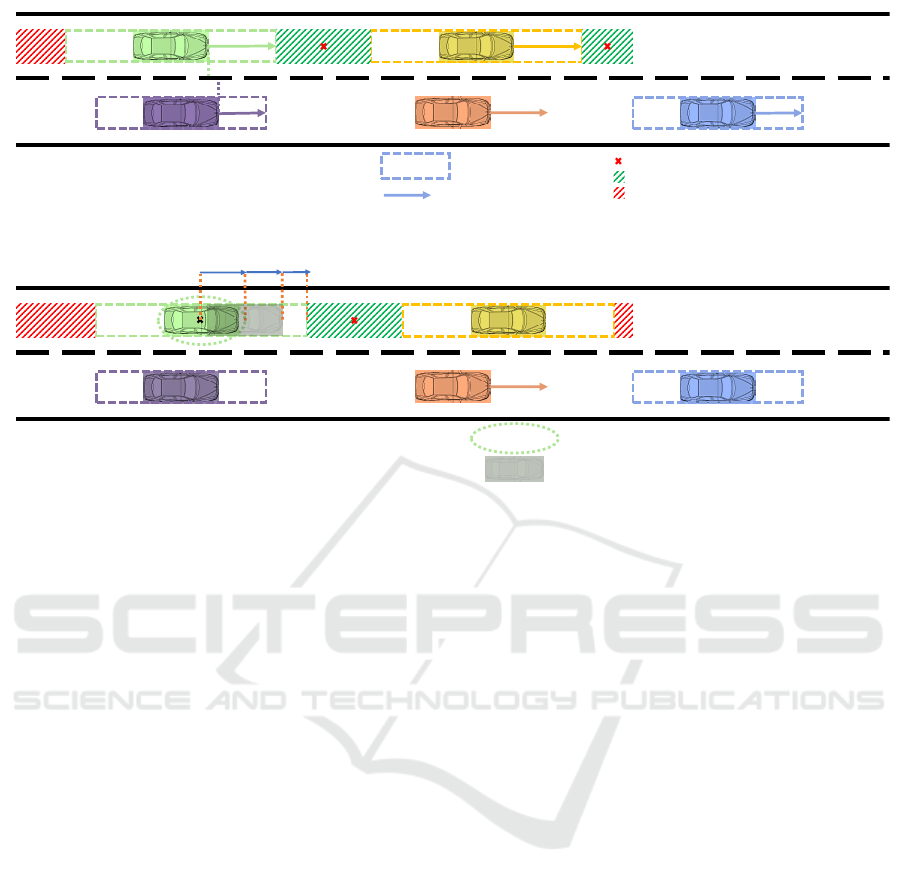
Figure 2: Example scene showing the inter-vehicular gaps and safety margins around surrounding vehicles. Safety margins
are depicted with dashed-rectangles around the surrounding vehicles. (The orange-colored vehicle denotes the ego vehicle,
hence does not have a safety margin around it.) In 2a, the gap in front of the adjacent left lane is defined by the lead vehicle
in the left and ego lanes. In 2b, this gap is closed, and the safety margin around the following vehicle in the left lane is broken
down into its parts: i.e., the vehicle dimensions d, the uncertainty of the perceived state of the vehicles (3σ), and desired time
gaps ∆
des
.
4 EXPERIMENTS
The experiments are conducted with an SUV class
vehicle that has a hybrid power-train system. The
test vehicle is surrounded by 8 mid-range radars, a
front-rear camera, MobilEye, GPS, and IMU. These
sensors are connected to the vehicle CAN network
and read by the corresponding ROS nodes for decod-
ing and data conversion purposes. The vehicle has
2 NVIDIA TX2 computers for sensor data collection
and processing as slave units and a workstation for
decision-making and high-level processing as the pri-
mary computer.
The data collected from each sensor is processed
by filtering and tracking modules. The object asso-
ciation module uses the output of these modules and
creates an object list. The same approach also applies
to road lanes. Finally, at the output of the perception
package, object information and lane information are
combined to get 360
◦
environment information.
The test vehicle has Adaptive Cruise Control
(ACC), Lane Keeping Assistant (LKA) and Lane
Change Assistant (LCA) modules. These ADAS
functions use the output of the perception module and
vehicle states directly from the CAN network. Our
decision-making model governs these ADAS mod-
ules to perform maneuvers.
4.1 Model Tuning
Tuning the model directly on the test vehicle would
potentially result in hazardous situations. A common
approach is to use simulations to ensure safety during
testing newly developed functions. However, generat-
ing high-fidelity simulations is costly, and it still does
not guarantee success when the model is transferred
to the real-world. Instead, we virtually tested and
tuned our model using estimations of the perception
module based on real-world sensor data.
The raw sensor data and state estimations of the
perception module are recorded synchronously in the
highway environment. To test the model under vari-
ous conditions, several traffic scenarios are performed
during data collection. The collected data is replayed
in the Robotic Operation System (ROS) environment,
and the decision-making model is run standalone as
a ROS package. We also used RViz, a native vi-
sualization tool in ROS, to visualize the output of
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
482
the perception module. RViz helps us visualize what
the decision-making model is aware of about its sur-
rounding, and observe the corresponding system be-
havior.
Figure 3: Rviz visualization.
4.2 Vehicle Tests
A twelve-minute autonomous drive with no driver
intervention has been achieved on the North Mar-
mara Highway in Istanbul. During the trip, the user-
controlled desired speed of the vehicle has been set
to 90 km/h, and three more vehicles accompanied the
autonomous car: two vehicles around the autonomous
vehicle and a lead vehicle to test different scenarios
that are expected to result in different behaviors (left-
lane change, right-lane change, lane keeping).
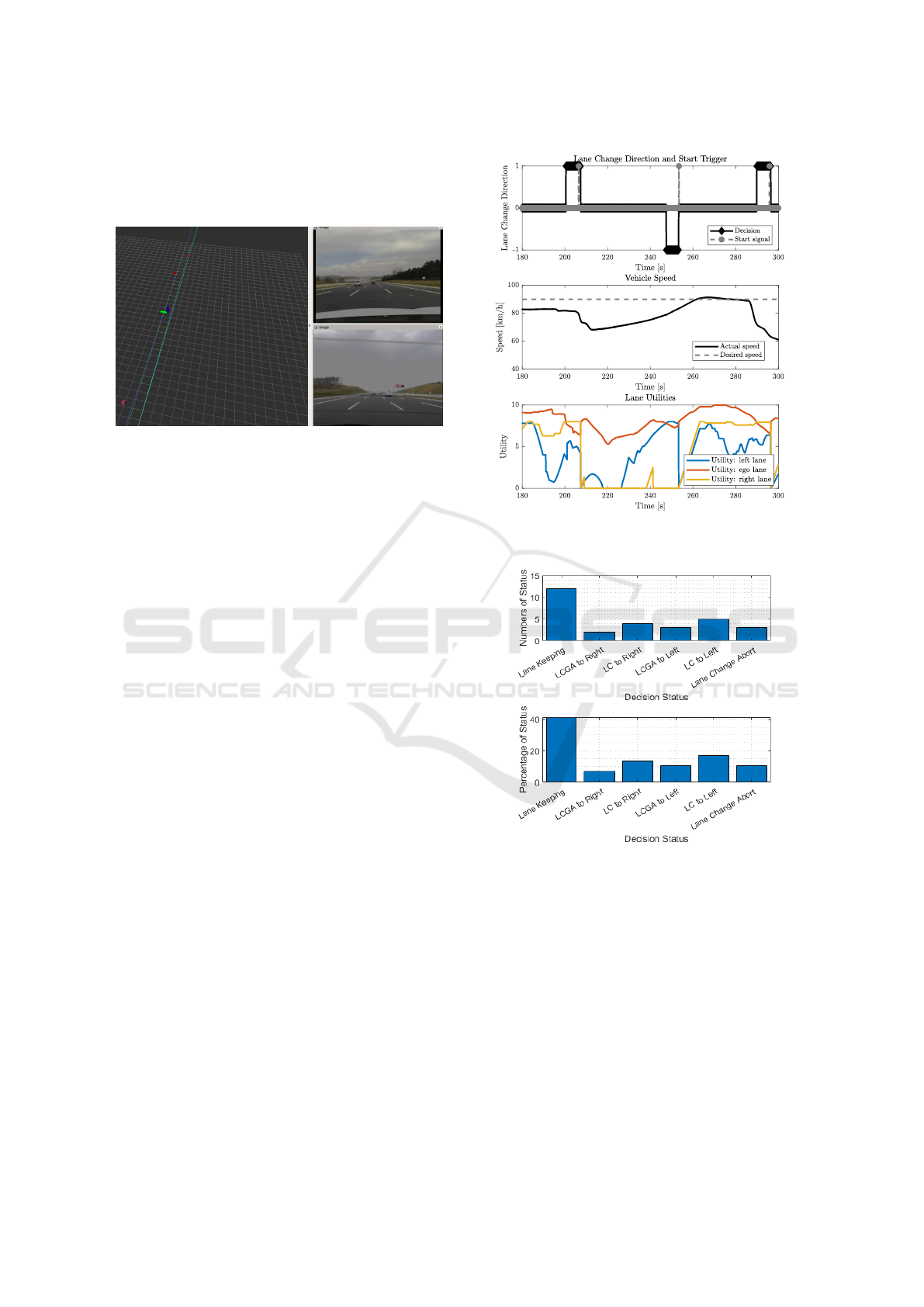
The statistics of the lane change decisions (LC)
and gap acceptance (LCGA) occurrences have been
provided in Figure 5. The number of lane changes
are higher than expected for a twelve-minute drive
as the vehicles accompanying the autonomous vehi-
cle intentionally behaved in a way that would lead the
decision maker to decide for lane changes.
In Figure 4, signals belonging to a two-minute ex-
cerpt of the autonomous drive are presented: the de-
cision signal indicating a desire for lane change and a
start signal triggering a safe lane change (upper plot);
the ego vehicle speed (middle plot); and lane utili-
ties (lower plot). Here, the start signal is a Boolean
signal whereas the decisions are encoded as follows:
−1 for left lane, 0 for lane keeping, and 1 for right
lane. As a result of the calculated utilities (lower
plot), the decision-maker opted for three lane changes
to achieve and maintain its desired speed in this two-
minute excerpt. However, before a lane change takes
place, the gap selection algorithm should find a suit-
able gap that the ego vehicle can align with. There-
fore, decision signals and start signals are not syn-
chronous in the upper plot.
The number of lane change, lane keep and lane
change abort decisions are shown in the Figure 5. It is
seen that due to the conservative nature of the model,
Figure 4: Lane change decisions, Lane utilities and vehicle
speed during a part of autonomous driving.
Figure 5: Lane change decisions during the vehicle test.
lane keeping decision is mostly made. In addition, the
fact that the lane change abort decision is taken from
time to time emphasizes the importance of having a
gap selection method before the lane change decision.
5 CONCLUSION AND FUTURE
WORK
In this study, we design, implement and test a
decision-making model for highway autonomous
driving with a special focus on discretionary lane-
change maneuvers. Highway driving is gener-
Automated Lane Change Decision Making in Highway using a Hybrid Approach
483

ally straightforward and does not require complex
decision-making situations like intersection handling,
pedestrian interventions, distorted roads, and so on.
The most important aspects of highway driving are
longitudinal control to keep a safe distance from other
objects, and lateral control to make lane changes
when it is necessary. Therefore, one of the required
aspects of highway autonomous driving is evaluating
the traffic condition to decide whether a lane change
is needed and does it suit safety and comfort criteria.
In this regard, we design a two-step model that in-
cludes a probabilistic assessment of road lanes and a
deterministic assessment of the inter-vehicular gaps.
For the probabilistic assessment, utility functions that
are combinations of road factors are used. Highway
lanes are constantly evaluated concerning the utility
functions. Then, if a lane change is desired, the gap
selection algorithm starts evaluating inter-vehicular
gaps in the lanes to perform a safe and comfortable
lane change.
In addition to the virtual tests performed with the
sensor data collected during driving on highway, our
model was also integrated into a vehicle and tested
in real world conditions. The vehicle tests on the
highway drive indicate that our model is capable of
assessing the road conditions and reacting to the en-
vironmental changes conservatively. The test vehi-
cle avoided any dangerous maneuvers while driving,
and it generally tended to continue in the lane it was
in. Nevertheless, one limitation of our model is the
lack of assessing the future states of the environment
with a robust prediction model. Instead, we utilize a
constant-acceleration model that does not assume any
lateral maneuvers.
ACKNOWLEDGMENT
This work is supported by the Scientific and Techno-
logical Research Council of Turkey (TUBITAK) un-
der Grant No. 5169901.
REFERENCES
Ahmed, K. I. (1999). Modeling Drivers’ Acceleration and
Lane Changing Behavior. PhD thesis, MIT.
Alizadeh, A., Moghadam, M., Bicer, Y., Ure, N. K., Yavas,
U., and Kurtulus, C. (2019). Automated lane change
decision making using deep reinforcement learning in
dynamic and uncertain highway environment. In 2019
IEEE Intelligent Transportation Systems Conference
(ITSC), pages 1399–1404.
Ardelt, M., Coester, C., and Kaempchen, N. (2012). Highly
automated driving on freeways in real traffic using a
probabilistic framework. IEEE Transactions on Intel-
ligent Transportation Systems, 13(4):1576–1585.
Brechtel, S. (2015). Dynamic Decision-making in Contin-
uous Partially Observable Domains: A Novel Method
and its Application for Autonomous Driving. PhD the-
sis, Karlsruher Instituts f
¨
ur Technologie (KIT).
Brechtel, S., Gindele, T., and Dillmann, R. (2011). Prob-
abilistic MDP-Behavior Planning for Cars. In 2011
IEEE 14th International Conference on Intelligent
Transportation Systems, pages 1537–1542, Washing-
ton.
Brechtel, S., Gindele, T., and Dillmann, R. (2014). Prob-
abilistic Decision-Making under Uncertainty for Au-
tonomous Driving using Continuous POMDPs. In
17th International IEEE Conference on Intelligent
Transportation Systems (ITSC), pages 392–399, Qing-
dao.
EGM, T. (2020). Trafik
˙
Istatistik b
¨
ulteni Traffic statistics
bulletin].
Gipps, P. G. (1986). A model for the structure of lane-
changing decisions. Transportation Research Part B:
Methodological, 20(5):403–414.
Mirchevska, B., Pek, C., Werling, M., Althoff, M., and
Boedecker, J. (2018). High-level decision making for
safe and reasonable autonomous lane changing using
reinforcement learning.
Nilsson, J., Silvlin, J., Brannstrom, M., Coelingh, E., and
Fredriksson, J. (2016). If, When, and How to Perform
Lane Change Maneuvers on Highways. IEEE Intelli-
gent Transportation Systems Magazine, 8(4):68–78.
Shi, T., Wang, P., Cheng, X., Cha, C.-Y., and Huang, D.
(2019). Driving decision and control for autonomous
lane change based on deep reinforcement learning.
Toledo, T. (2003). Integrated Driving Behavior Modeling.
PhD thesis, MIT.
Ulbrich, S. and Maurer, M. (2013). Probabilistic Online
POMDP Decision Making for Lane Changes in Fully
Automated Driving. In 16th International IEEE Con-
ference on Intelligent Transportation Systems (ITSC
2013), pages 2063–2067.
Wang, P., Chan, C.-Y., and de La Fortelle, A. (2018). A
reinforcement learning based approach for automated
lane change maneuvers. In 2018 IEEE Intelligent Ve-
hicles Symposium (IV), pages 1379–1384.
Yavas, U., Kumbasar, T., and Ure, N. K. (2020). A new
approach for tactical decision making in lane chang-
ing: Sample efficient deep q learning with a safety
feedback reward. In 2020 IEEE Intelligent Vehicles
Symposium (IV), pages 1156–1161.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
484
