
Concept of a Robotic System for Autonomous Coarse Waste Recycling
Tim Tiedemann
1
, Matthis Keppner
1
, Tom Runge
2
, Thomas V
¨
ogele
2
, Martin Wittmaier
3
and Sebastian Wolff
3
1
Department CS, University of Applied Sciences Hamburg, Berliner Tor 7, Hamburg, Germany
2
German Research Center for Artificial Intelligence, Robotics Innovation Center, Bremen, Germany
3
Institut for Energy, Recycling and Environmental Protection at Bremen University of Applied Sciences, Bremen, Germany
Keywords:
Smart Recycling, Construction Waste Recycling, Multispectral Image Processing, Mobile Robotics.
Abstract:
The recycling of coarse waste such as construction and demolition waste (CDW), bulky waste, etc., is a
process that is currently performed mechanically and manually. Unlike packaging waste, commercial waste
and the like, which is usually cut or shredded into small pieces and then automatically separated and sorted on
conveyor belt-based systems, coarse waste is separated by specialized personnel using wheel loaders, cranes or
excavators. This paper presents the concept of a robotic system designed to autonomously separate recyclable
coarse materials from bulky waste, demolition and construction waste, etc. The proposed solution explicitly
uses existing heavy equipment (e.g., an excavator currently in use on-site) rather than developing a robot from
scratch. A particular focus is set on the sensory system options used to identify and classify waste objects.
1 INTRODUCTION
The waste management and recycling sector can
make a significant contribution to reducing climate-
damaging emissions. For example, the disposal of
municipal waste in a landfill is associated with emis-
sions of approx. 400 g CO
2
equiv./kg of waste, while
high-quality energy recovery of the same waste is as-
sociated with only approx. -22 g CO
2
equiv./kg of
waste (Wittmaier et al., 2009). In Germany, the ban
on dumping untreated waste in landfills and the asso-
ciated requirement for mechanical-biological or ther-
mal waste treatment indicates that the waste- and en-
vironmental services industry already plays a signifi-
cant role in the reduction of climate-damaging emis-
sions. If waste, such as plastics, is recycled materially
rather than energetically, climate-damaging emissions
can be reduced by 1600 g to 2000 g CO
2
equiv./kg
plastic waste (HDPE, LDPE, PET) (Rudolph et al.,
2020). Material recycling is an effective form of cli-
mate protection and also, naturally, of resource con-
servation. For this reason, more and more efforts
have been made in recent decades to improve ma-
terial recycling. An essential prerequisite for mate-
rial recycling is the sorting of materials (paper, card-
board, plastics etc.). In order to obtain sorted ma-
terials from mixed waste, conveyor belt-based sort-
ing plants for small-scale waste have been developed
since the 1990s. Whereas in the beginning, sorting
was exclusively manual and mechanical, AI-assisted
robotic systems are now slowly starting to be used
for small-scale waste. The technology is continuously
improved (Zhang et al., 2019), which makes the sort-
ing process more efficient. However, although effi-
cient sorting techniques are available today specifi-
cally for small-sized waste, coarse waste is still sorted
using the same technology as in the 1970s and 1980s.
As a result, large quantities of principally recyclable
materials hidden in coarse waste are lost (coarse waste
in Germany: approx. 2.25 million Mg of bulky
waste, 197 million Mg of construction and demoli-
tion waste etc.) (Federal Statistical Office of Germany
(Destatis), 2020). For climate protection and resource
conservation purposes, more effective processes for
sorting coarse waste by type must be developed to re-
cover recyclable materials from mixed waste.
In this paper, results from investigations into the de-
velopment of AI-based robotic sorting systems for
coarse (bulky waste, construction and demolition
waste etc.) are presented. The results show strategies
that enable a more efficient sorting of coarse waste.
The partial material recycling of mixed waste offers
an active contribution to climate protection and re-
source conservation.
Tiedemann, T., Keppner, M., Runge, T., Vögele, T., Wittmaier, M. and Wolff, S.
Concept of a Robotic System for Autonomous Coarse Waste Recycling.
DOI: 10.5220/0010584004930500
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 493-500
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
493

2 RELATED WORK
2.1 Bulky Waste Sorting Pilot Study
In a pilot study conducted in 2011 (the R&D project
”Efficient Sorting of Bulk Wastes with Robots”
(ROSA, 2011)), a system concept for the automatic
sorting of bulky wastes was developed. The project
evaluated the feasibility of technical solutions for
the automated removal of non-recyclable items from
large piles of bulky wastes entering the recycling
plant. It also looked at options for the automatic ex-
traction of larger items of recyclable material during
the final sorting on the conveyor belt. The focus of the
project was on the evaluation of sensors and methods
for 2D and 3D object recognition. The lack of consis-
tent form features of the often deformed and damaged
objects as well as the highly heterogeneous composi-
tion of the waste conglomerate were identified as the
key challenges for both object recognition and object
manipulation.
In support of a theoretical study, lab experiments
were conducted to recognize and subsequently ma-
nipulate objects within the waste conglomerate us-
ing data fusion of different sensors (e.g., cameras, 3D
laser scanners, NIR sensors) and standard robotic ma-
nipulators (e.g., KUKA). The lab demonstrator was
able to prove the basic feasibility of the ROSA con-
cept. However, it was not possible to adapt and test
the concept under actual working conditions due to
the lack of financial resources and available state-of-
the-art equipment at the time.
Nevertheless, the outcome of the ROSA project
provides a valuable starting point for more recent ef-
forts to implement a SmartRecycling concept. As
described in this paper, new developments in AI-
based object recognition, sensor fusion and mobile
robotics are the key to solving some of the fundamen-
tal problems with the automated extraction of large
waste objects from a heterogeneous waste conglom-
erate ROSA had identified at the time.
2.2 Automation of Large Hydraulic
Machines
Standard industrial robots as well as most profes-
sional service robots developed for indoor and field
applications use electric actuators to grip, hold, and
move objects. In these electric-powered systems,
several integrated sensors continuously monitor the
system-state and thus deliver the information needed
to automate the control of manipulators, grippers and
other sub-systems.
On the other hand, hydraulic-powered machines,
such as cranes and excavators, are more challeng-
ing to automate, since they are typically not equipped
with the necessary sensors and hydraulic actuators of-
ten lack the precision of their electric counterparts.
Despite these shortcomings, large hydraulic-
powered machines are prevalent in many industries
such as construction, mining, waste sorting, agricul-
ture and forestry, etc. Due to their high performance,
robustness, and reliability, they are used in harsh en-
vironments and rugged terrain. Also, the deployment
of automated hydraulic heavy machinery in construc-
tion, mining, and agriculture is increasing. There
already exist several automated hydraulic machines,
either as commercial products or as research proto-
types.
In project ROBDEKON (K
¨
uhn et al., 2020), DFKI
is part of a consortium that develops solutions for
the automation of large hydraulic machines. By
retrofitting a M545 excavator, build by the Swiss com-
pany Menzi Muck, with sensors and modified actu-
ators, DFKI developed the hydraulic robot ARTER
(Automated Rough Terrain Excavator Robot)
1
With ARTER, ROBDEKON could prove that a
large hydraulic excavator can be automated to suc-
cessfully handle complex tasks, like manipulating
barrels filled with hazardous waste, if equipped with
sensors that can measure the state and pose of joints,
limbs and the like. However, the project also showed
that this retrofitting does come at a high cost, limiting
the applicability of the concept for many legacy sys-
tems. Also, since the robot has to operate in a very un-
structured and highly dynamic environment, conven-
tional methods for robot control that cannot react to
changes in the environment are only of limited value.
2.3 Sensor Data Processing in
Construction Waste Analysis
In different projects, the classification of waste ob-
jects based on RGB images was studied. Kim et al.
(2019) use a modified LeNet 5 convolutional neural
network (CNN) to classify objects by RGB images in
carton vs. plastic (Kim et al., 2019). Also, some more
applications of neural networks to classify waste ob-
jects based on visual image data are presented by Kim
et al. (2019). Such an RGB-image-based classifica-
tion seems to be feasible once objects can be iden-
tified within images. In an extreme case, this could
be accomplished by scanning a barcode of an ob-
ject (e.g., when supporting people sorting their waste
1
https://robotik.dfki-bremen.de/en/research/robot-
systems/arter/
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
494

(Bonino et al., 2016)). In the use case by Kim et al.
(2019) the objects are separated from others before
the classification task and solely consumer packaging
objects are used (and only two classes need to be dis-
tinguished).
Regarding the recycling of construction and de-
molition waste (CDW) two problems arise that make
a classification solely based on RGB images much
harder: 1. The objects in CDW are usually broken
into several parts and 2. they were often constructed
in a unique shape depending on the specific situa-
tion and the specific construction. Furthermore, in
this use case, objects will cover each other within the
heap. All these properties make it hard to classify ob-
jects just by RGB image data. A solution could be
the use of additional spectra for image classification.
Thereby, not just an object classification but a mate-
rial classification could be feasible.
Linß (2016) presents a thorough review of sev-
eral methods used to distinguish between different
classes of construction waste (Linß, 2016). Discussed
are solutions that use sensors of different modalities,
e.g., visual RGB cameras, near-infrared (NIR) and
short wave infrared (SWIR) imaging for hyperspec-
tral imaging (HSI), as well as methods using x-ray.
She concludes that especially the combination of VIS
and NIR is of particular interest and will be studied
further. Other publications also support these sensor
modalities (Anding et al., 2013; Kuritcyn et al., 2015),
as well as considered as state-of-the-art in consumer
waste recycling utilizing VIS/NIR/SWIR-based clas-
sification.
3 THE SmartRecycling CONCEPT
This paper summarizes the results of a study con-
ducted by the authors in 2020 and 2021 (project
“SmartRecycling”), with funding from the German
Federal Ministry for the Environment, Nature Conser-
vation and Nuclear Safety. The objective of SmartRe-
cycling was to develop a general technical concept
for the sorting of coarse and bulky wastes. The im-
plementation and validation of this concept were not
within the scope of this study but may be realized in
a later project phase.
As the first step in SmartRecycling, the on-site
conditions and processes in several recycling plants in
Northern Germany were studied, and functional sys-
tem requirements were developed. A thorough anal-
ysis revealed that the process of pre-sorting holds the
best potential for automation. Pre-sorting describes
the process of removing recyclable items of higher
quality and value (e.g., wood, plastics, metals) as well
as objects that either contain hazardous materials or
are a potential obstruction to the machinery (e.g., mat-
tresses, ropes, nets) from the wastes before shredding
and further processing. The items are extracted from
the waste conglomerate manually, i.e., by skilled op-
erators with the help of large hydraulic or electro-
hydraulic cranes and excavators.
Figure 1: Rail-bound crane from BZ (at ASO, Osterholz.)
(Wolff and Wittmaier, 2021, under CC-BY 4.0).
Figure 1 shows a rail-mounted crane from the
manufacturer Baljer & Zembrod GmbH & Co. KG
that is used in a recycling facility operated by ASO
Abfall-Service Osterholz GmbH. The crane is oper-
ated manually by an experienced operator. Both the
manipulator and the gripper of this machine are ac-
tuated hydraulically. The machine itself moves elec-
trically on a rail parallel to the length of the rectan-
gular pit that holds the waste. Other machines typi-
cally used in recycling facilities for the pre-sorting of
coarse waste are regular diesel-powered mobile hy-
draulic excavators.
3.1 AI-driven Automation and
Actuation
Although the machines used for the pre-sorting of
coarse waste can be of different types, they have in
common that they are usually not equipped for au-
tomation and thus require significant investments in
sensors and electronics to make them fit for automated
control. The SmartRecycling study postulated the use
of state-of-the-art AI and machine learning to develop
a solution for the automation of standard off-the-shelf
hydraulic and electro-hydraulic machines without the
need for significant modifications. Desirable side ef-
fects are a reduction in investment and the automated
use of legacy machinery in recycling facilities (and
other application areas). It needs to be kept in mind
Concept of a Robotic System for Autonomous Coarse Waste Recycling
495

that the standard electrical off-the-shelf industry ma-
nipulators are usually not suitable for CDW recy-
cling tasks with respect to workspace and payload de-
mands.
The basic idea of this AI-driven automation is to
use AI methods such as Reinforcement Learning (RL)
to teach an artificial neural network (ANN) how to
control a machine by letting it associate observable
control inputs, issued through the machine’s standard
control interface, with the corresponding machine be-
havior. Motion sensors installed on the ceiling and
the walls of the recycling facility track the machine’s
behavior and record, for example, the movements of
the manipulator and gripper. By using markers at-
tached to the gripper, manipulator joints and other
critical parts of the machine, each trajectory through
3D space is tracked. Based on that, a 3D motion
model of the entire machine is developed. The ANN
is then trained with the motion model as output and
the corresponding control commands issued by the
human operator as input. Using this approach, the
ANN can predict the relationship between a control
command and the crane’s reaction and use this to
move the crane precisely to a target position.
Training of the ANN can happen during spe-
cific training sessions or during the standard human-
controlled operation of the machine. In principle,
such an AI-driven control should be largely inde-
pendent of the machine it is applied to (see also
www.smartrecycling-projekt.de).
3.2 System Components
Several AI-based software modules are required to
implement the AI-based control and automation out-
lined above. The SmartRecycling approach proposes
four software modules bundled in one unit, dubbed
the ’MachineBrain’. The MachineBrain supports the
control of the hydraulic manipulator and the hydraulic
gripper as well as the detection and classification of
objects and materials in the waste conglomerate. The
four modules of the MachineBrain are:
• SmartObjectClassifier: The SmartObjectClassi-
fier enables the recognition of individual objects
in the waste conglomerate with the help of AI-
based object and material classification based on
data from infrastructure sensors installed in the fa-
cility. In a first step, an object classification and
a rough material classification is carried out (see
Section 3.3 and Section 3.4). In a second step,
the SmartObjectClassifier includes data from the
sensors installed in the gripper and the waste pit’s
walls to further improve the object and/or material
classification.
• SmartObjectTracker: This module determines the
x-y-z position of the objects recognized by the
SmartObjectClassifier. Details are given in Sec-
tion 3.5.
• SmartMotionController: As described in Sec-
tion 3.1, the SmartMotionController enables the
crane to move independently and approach a
specific target position from the SmartObject-
Tracker. To achieve this, the AI-driven control
software must have learned the relationship be-
tween control commands and manipulator and
gripper movements. Its motion is calculated using
inverse kinematics, considering the precise posi-
tion and orientation of each manipulator joint, hy-
draulic cylinders, and such.
• SmartProcessController: The SmartProcessCon-
troller combines the data on the position and the
material class of an object (from ObjectTracker
and ObjectClassifier) with the data on the crane’s
current position and orientation (from the Mo-
tionController) and plans the crane’s next work
steps. External data on the current market sit-
uation (Which recyclable materials do currently
have the best economic value?) and the overall re-
cycling process (When arrives the next transport?
Which materials are potentially harmful to the en-
vironment?) can also further optimize the pro-
cess control regarding ecological and economic
aspects.
3.3 Sensory System I: Object
Classification
The sensory system’s first step is the detection and
classification of known objects in the waste heap. If it
recognizes known objects or parts of objects, it reads
an exact definition of its material(s) from its database.
Thus, this is comparable to the approach by Bonino et
al. (2016) for consumer waste (Bonino et al., 2016).
While Kim et al. (2019) did not explicitly follow this
approach, their modified LeNet at least has the chance
to identify objects (instead of materials) (Kim et al.,
2019). Visual object classification has been well stud-
ied for decades. Solutions using different types of ma-
chine learning (ML) such as Support Vector Machines
(SVM) and deep learning methods such as the well-
known convolutional neural networks (CNN) (”one-
stage” and ”two-stage”: e.g., Inception and YOLO
variants) were presented (review (Jiao et al., 2019)).
These candidate methods will be evaluated and, if
necessary, further developed. Sensors usually utilized
for this first step are vision (RGB) cameras.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
496
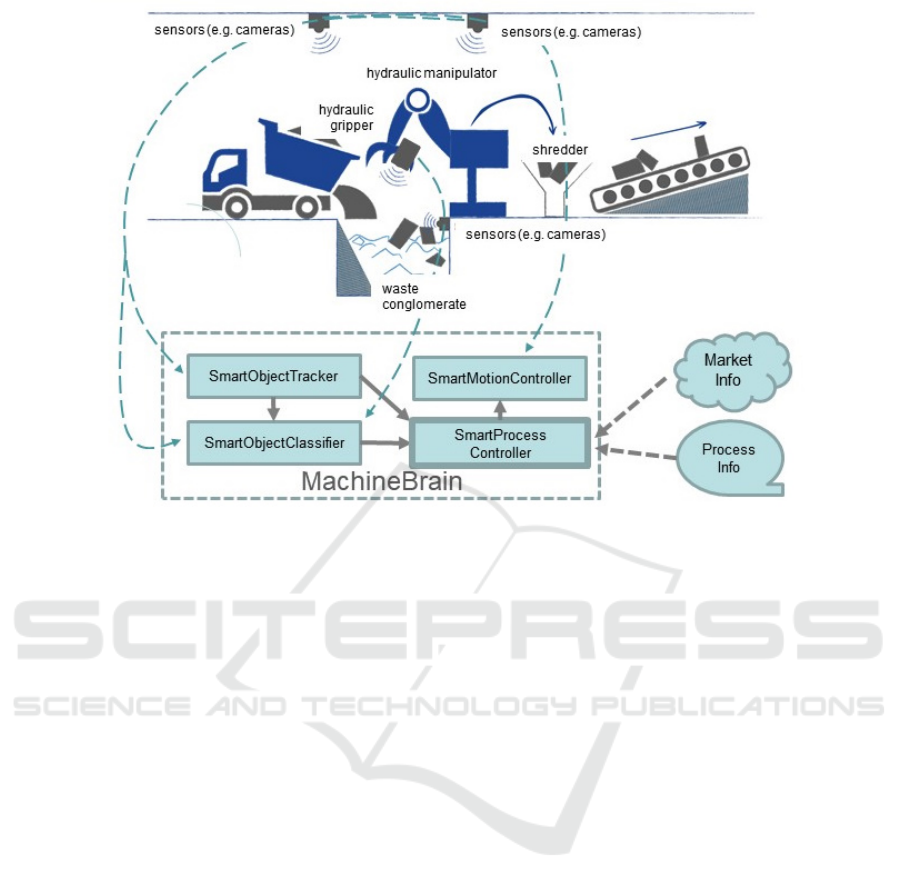
Figure 2: SmartRecycling concept.
3.4 Sensory System II: Material
Classification
For unknown and unrecognized objects in the waste
heap, a second step is planned in the sensory system:
Again, machine learning methods (ML), particularly
SVM or CNN, are used to identify the class of mate-
rial. If this step succeeded, the first step can be trig-
gered again, now in run two, considering the mate-
rial classification result. For the application of SVM
in CDW recycling to classify materials, see (Linß,
2016). As presented within this, the non-visual op-
tical spectra should be taken advantage of, too.
So far, these sensors are used in short distances
and with separated objects. Within this project’s on-
going work, further research must show whether a
material classification is possible in a distance of 15 m
to 25 m from sensors at the hall’s roof. If only a coarse
classification is possible at such distances, additional
sensor equipment could be attached to the excavator
for a more detailed material classification when grasp-
ing.
3.5 Sensory System III: Determination
of 3D Position
After the classification of objects and/or materials, the
next object targeted to be grasped and sorted can be
selected. This could be done using predefined rules,
e.g., based on the type of object or its position in the
waste heap. To compute the manipulator’s path and
to perform the grasp, the 3D position of the selected
object needs to be known. To this purpose, (1) mul-
tiple cameras and triangulation, or (2) other sensors,
e.g., LiDAR or time-of-flight (TOF) camera, could be
used. As the environment and most sensors are fixed
to the infrastructure, a calibration could be carried out
to map object positions to an angle in one type of sen-
sors and a 3D position in the position sensors. Here,
the solution proposed by Kim et al. (2019) seems
to be a very interesting approach (Kim et al., 2019).
However, a problem in this use case is supposed to be
the large distance between sensors and objects.
4 FIRST SENSOR DATA
COLLECTION
In the project’s concept phase, the first tests were car-
ried out to reduce the number of potentially usable
sensor modalities down to a manageable set. Dis-
cussed but not selected were radar sensors due to their
coarse spatial resolution and thermal imaging sensors
due to the long time constants when the objects’ tem-
peratures change. Both sensor types can be added to
counter (temporary) poor viewing conditions for the
other sensors (due to smoke etc.).
Concept of a Robotic System for Autonomous Coarse Waste Recycling
497

Figure 3: Left column: Sample RGB images in the visual spectrum. Right column: gray images of a spectrum of around
1000 nm. The resolution of the visual spectrum camera is 1920×1200 (FOV 30.4
◦
× 19.0
◦
) and of the SWIR camera 320×256
(FOV 22.9
◦
× 18.3
◦
). The images were taken in a distance of about 15 m (to the plants in the image centers). The second and
third row show magnifications of the center of the original images (Kaßmann et al., 2021a, under CC-BY 4.0).
4.1 UV/VIS/NIR/SWIR Sensor Data
Most promising to distinguish different materials
seem to be multi-spectral image data in the UV-, vi-
sual, and SWIR-spectrum. First sample images were
taken in a laboratory environment as depicted in Fig-
ure 3. As can be seen in the second row images, the
1,000 nm spectrum (as an example) shows differences
that cannot be seen in the RGB image: comparing the
two green ”plants” in the 1,000 nm spectrum shows
that one is a natural plant while the other is made from
plastic. Also, the blue vs. the black parts of the chairs
can be distinguished more easily in infrared as well as
the display frames from the displays.
The third row image shows the problem of the
coarse resolution of the SWIR camera’s InGaAs sen-
sor: in a distance of 15 m the field of view (FOV)
leads to an area that covers a large part of a waste
heap, but small objects (like the leaves of the plants)
shrink to just a few pixels. Thus, the material classifi-
cation in a distance of, e.g., 15 m could maybe work
for objects of about 10 cm×10 cm but not for small
objects in the size of one leaf (≈ 3 cm×5 cm).
Fifty-eight objects of different materials (wood,
metal, plastic, stone, paper) were collected at CDW
recycling sites and households to generate test image
data. For each subset of these objects, images were
taken with a visual image camera, a UV camera, and
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
498

Figure 4: Left: RGB image of six sample pieces in the visual spectrum. Right: false-color image with the spectra around
880 nm, 1300 nm, and 395 nm (Kaßmann et al., 2021b, under CC-BY 4.0).
a SWIR camera. Multiple bandpass filters of differ-
ent wavelengths were used (plus one image without
filters). Altogether, 14 images of different conditions
(wavelengths) were taken for each set of test objects.
Sample images of one set of objects are shown in
Figure 4. The false-color image shows a more pro-
nounced difference between the two objects on the
left and fewer differences within the objects on the
right than the image in the visual spectrum. Both are
good to distinguish objects of different materials but
not to divide objects into image segments.
After the first manual analysis of the sample data,
we implemented small scripts to prepare data sets that
can be analyzed automatically. Figure 5 (left) shows a
tool to select rectangular areas within the test objects.
By the script, for each test object, we get a number
of pixels in each of the three camera images for each
of the different filter conditions. Eventually, each ob-
ject (rectangle) is represented by sample points in a
14-dimensional space. Figure 5 (right) shows a pro-
jection of all selected points (within the rectangles)
from the 14-dimensional space to a three-dimensional
space.
Each color in the plot represents one rectangle in
the camera images. As can be seen, even in such a
simple 3D projection, the pixels of the different colors
(i.e., different rectangles and different objects) are rel-
atively well separated. As the next step, cluster analy-
sis will be done to check if – for the collected data set
– a classification seems to be feasible and what kind
of pre-processing should be applied. Afterwards, dif-
ferent classification methods will be tested.
5 CONCLUSIONS
A concept of an autonomous robotic system for sort-
ing construction and demolition waste (CDW) or
bulky waste, in general, was proposed. It emphasizes
reusing standard presorting equipment typically used
in the bulky waste recycling industry, i.e., hydraulic
cranes or excavators. The application of a sophisti-
cated and adaptive control system that uses reinforce-
ment learning (RL) methods has been identified as a
useful and promising approach. A further advantage
of such an ML-based control system is the potential
portability to other cranes and applications.
Classifying materials in distances of 15 m to even
25 m is one of the main challenges for such a sensory
system. This concept uses a combination of differ-
ent imaging sensors of spectra in visible and invisible
wavelength ranges plus fixed sensors in the infrastruc-
ture and mobile sensors at the crane. After the first
manual tests have been carried out, automated analy-
ses need to be run on all collected data next. Thereby,
the separability of different clusters and the accuracy
of the cluster–object assignments can be studied and
quantified.
ACKNOWLEDGEMENTS
The authors would like to thank Maximilian De
Muirier for his thorough review of this paper and
helpful advice.
Furthermore, the authors would like to thank Adrian
Kaßmann for his support in the data collection and
data pre-processing steps.
This work was partly funded by the Federal Re-
public of Germany, Ministry for the Environment,
Nature Conservation and Nuclear Safety, grant no.
67KI1013A/B/C.
Concept of a Robotic System for Autonomous Coarse Waste Recycling
499
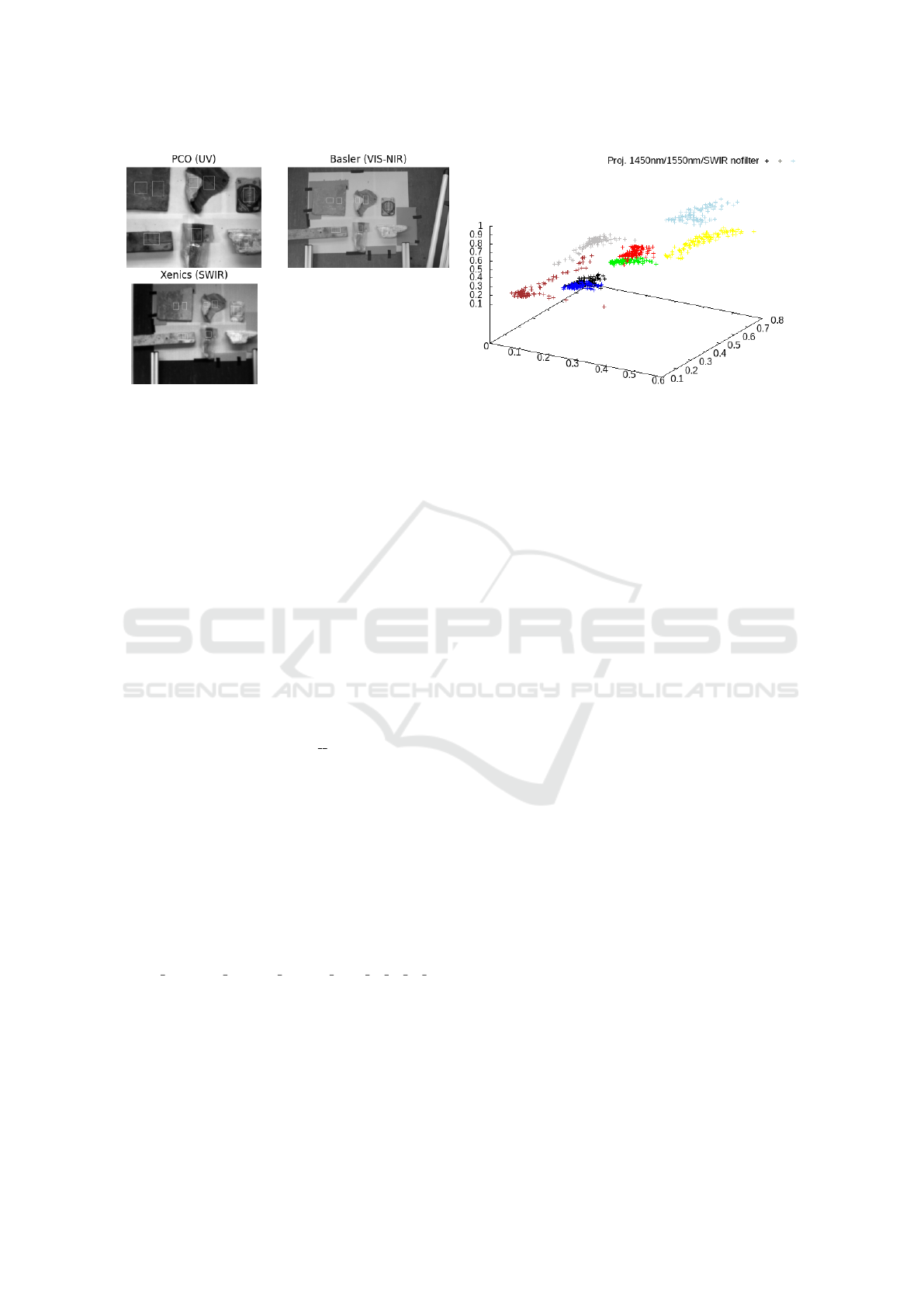
Figure 5: Left: A tool to select sample data of the test objects from all images of a scene. With the rectangles, specific parts
(pixels) of the objects can be selected (Keppner and Kaßmann, 2021, under CC-BY 4.0). Right: Three-dimensional projection
of the 14-dimensional multi-spectral image data of the objects selected by the rectangles (compare the images on the left).
Each color represents pixel data of one rectangle in the three images i.e. of the same object (pixels in rectangle “1” in the UV
and in the VIS and in the SWIR image, pixels in rectangle “2” in the UV/VIS/SWIR images etc.).
REFERENCES
Anding, K., Garten, D., and Linß, E. (2013). Application of
intelligent image processing in the construction mate-
rial industry. ACTA IMEKO, 2(1):61–73.
Bonino, D., Alizo, M. T. D., Pastrone, C., and Spirito, M.
(2016). Wasteapp: Smarter waste recycling for smart
citizens. In 2016 International Multidisciplinary Con-
ference on Computer and Energy Science (SpliTech),
pages 1–6. IEEE.
Federal Statistical Office of Germany (Destatis) (2020). Ab-
fallbilanz 2018. https://www.destatis.de/DE/Themen/
Gesellschaft-Umwelt/Umwelt/Abfallwirtschaft/
Publikationen/Downloads-Abfallwirtschaft/
abfallbilanz-pdf-5321001.pdf? blob=
publicationFile. [Online; accessed 30-March-2021].
Jiao, L., Zhang, F., Liu, F., Yang, S., Li, L., Feng, Z., and
Qu, R. (2019). A survey of deep learning-based object
detection. IEEE Access, 7:128837–128868.
Kaßmann, A. F., Keppner, M., and Tiedemann, T. (2021a).
Comparison of a vis and a 1,000 nm ir image with
different magnifications. figshare. figure. doi: https:
//doi.org/10.6084/m9.figshare.14607777.v1.
Kaßmann, A. F., Keppner, M., and Tiedemann, T. (2021b).
Comparison of vis and uv/ir false color image of dif-
ferent materials. figshare. figure. doi: https://doi.org/
10.6084/m9.figshare.14607612.v2.
Keppner, M. and Kaßmann, A. F. (2021). rectangu-
lar pixelvalue selection example scene 21 01 20 0.
figshare. figure. doi: https://doi.org/10.6084/m9.
figshare.14604291.v2.
Kim, J., Nocentini, O., Scafuro, M., Limosani, R., Manzi,
A., Dario, P., and Cavallo, F. (2019). An innovative
automated robotic system based on deep learning ap-
proach for recycling objects. In ICINCO (2), pages
613–622.
K
¨
uhn, Heide, and Woock (2020). Robotersysteme f
¨
ur
die dekontamination in menschenfeindlichen umge-
bungen. Proceeding at Leipziger Deponiefachtagung
2020.
Kuritcyn, P., Anding, K., Linß, E., and Latyev, S. (2015).
Increasing the safety in recycling of construction and
demolition waste by using supervised machine learn-
ing. In Journal of Physics: Conference Series, volume
588, page 012035. IOP Publishing.
Linß, E. (2016). Sensorgest
¨
utzte sortierung von mineralis-
chen bau-und abbruchabf
¨
allen. Fachtagung Recycling
R, 16.
ROSA (2011). Rosa project website. https://robotik.
dfki-bremen.de/en/research/projects/rosa.html. Last
seen 17.05.2021.
Rudolph, N., Kiesel, R., and Aumnate, C. (2020). Un-
derstanding plastics recycling: Economic, ecological,
and technical aspects of plastic waste handling. Carl
Hanser Verlag GmbH Co KG.
Wittmaier, M., Langer, S., and Sawilla, B. (2009). Possibili-
ties and limitations of life cycle assessment (lca) in the
development of waste utilization systems–applied ex-
amples for a region in northern germany. Waste Man-
agement, 29(5):1732–1738.
Wolff, S. and Wittmaier, M. (2021). Treatment process of
bulky waste. figshare. figure. doi: https://doi.org/10.
6084/m9.figshare.14604375.v1.
Zhang, Z., Wang, H., Song, H., Zhang, S., and Zhang, J.
(2019). Industrial robot sorting system for municipal
solid waste. In International Conference on Intelligent
Robotics and Applications, pages 342–353. Springer.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
500
