
Extending DEAP with Active Sampling for Evolutionary Supervised
Learning
Sana Ben Hamida
1 a
and Ghita Benjelloun
2
1
Paris Dauphine University, PSL Research University, CNRS, UMR[7243], LAMSADE, 75016 Paris, France
2
Paris Dauphine University, PSL Research University, 75016 Paris, France
Keywords:
Genetic Programming, DEAP, Active Learning, Random Sampling, Weighted Sampling, Occupancy
Detection, Pulsar Detection.
Abstract:
Complexity, variety and large sizes of data bases make the Knowledge extraction a difficult task for supervised
machine learning techniques. It is important to provide these techniques additional tools to improve their
efficiency when dealing with such data. A promising strategy is to reduce the size of the training sample
seen by the learner and to change it regularly along the learning process. Such strategy known as active
learning, is suitable for iterative learning algorithms such as Evolutionary Algorithms. This paper presents
some sampling techniques for active learning and how they can be applied in a hierarchical way. Then, it details
how these techniques could be implemented into DEAP, a Python framework for Evolutionary Algorithms. A
comparative study demonstrates how active learning improve the evolutionary learning on two data bases for
detecting pulsars and occupancy in buildings.
1 INTRODUCTION
Learning from complex, large and unbalanced
databases is a major issue for most of the current data
mining and machine learning algorithms. More pow-
erful knowledge discovery techniques are needed to
deal with the related challenges. Evolutionary Data
Mining tools, such as Genetic Programming (GP), are
powerful meta-heuristics with an empirically proven
efficiency on complex machine learning problems.
Thus, the use of evolutionary data mining procedures
becomes a hot trend. Thanks to their global search
in the solution space, evolutionary computation tech-
niques help in the information retrieval from a volu-
minous pool of data in a better way compared to tradi-
tional retrieval techniques. Thus, they are part of the
promising tools to discover insights within the grow-
ing complexity and volume of available data. How-
ever, as all machine learning techniques, GP needs
some extensions to improve its efficiency when learn-
ing from large, complex or unbalanced datasets. This
paper investigates the use of active learning paradigm
to scale evolutionary data mining techniques to com-
plex data sets.
Active learning (Atlas et al., 1990; Cohn et al.,
1994) is a learning paradigm based on active sam-
a
https://orcid.org/0000-0003-4202-613X
pling techniques. The goal of any sampling approach
is to extract subsets from the original training set in
order to reduce the size or to handle some anomalies
such unbalanced classes . With active learning, subset
sampling is applied regularly along the training pro-
cess in order to change frequently the examples seen
by the algorithm. Subset selection could be done ran-
domly or according to a given strategy such data dif-
ficulty based strategy (Gathercole and Ross, 1997) or
data topology based strategy (Lasarczyk et al., 2004;
Hmida et al., 2016b). Active learning is successfully
implemented with iterative learning algorithm such as
evolutionary data mining methods.
This work outlines how we extended an existing
GP implementation with active sampling techniques
using three strategies: random selection, balanced se-
lection and weighted selection based on age and dif-
ficulty of exemplars. Random and weighted sampling
methods are applied on a balanced set extracted from
the training data base in order to handle the classes
unbalance problem. We also investigate the applica-
tion of multi-level sampling using different sampling
techniques on a hierarchical way. These strategies are
implemented on a Python framework for evolution-
ary algorithms, DEAP. They are applied to solve two
classification problems: pulsar classification and oc-
cupancy detection in buildings.
574
Ben Hamida, S. and Benjelloun, G.
Extending DEAP with Active Sampling for Evolutionary Supervised Learning.
DOI: 10.5220/0010604605740582
In Proceedings of the 16th International Conference on Software Technologies (ICSOFT 2021), pages 574-582
ISBN: 978-989-758-523-4
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

This paper is organized as follows. First we re-
mind briefly the evolutionary loop, the GP engine
and the their implementation over the Python frame-
work DEAP. Section 3 explains the active learning
paradigm and details the sampling techniques im-
plemented for this work: Random Sampling (RSS),
Balanced sampling (SBS) and Weighted Sampling
(DSS). Details about the implementation of these
techniques over DEAP are given in section 4. Sec-
tion 5 summarizes the classification problems for the
experimental study. The main results are summarized
and discussed in section 5.2 before the conclusion.
2 BACKGROUND
2.1 EAs: A Brief Overview
Evolutionary algorithms (EAs) are zero
th
order opti-
mization methods based on a random search of the
parameter space by a population of optimizers under-
going ”evolutionary pressure” based on an analogy
with Darwinian selection of species EAs are based on
the evolution of a population of solutions X
i
(individ-
uals), where X
i
a candidate solution to the problem.
Each solution X
i
is evaluated to give some measure
of its performance (fitness). The minimisation of this
measure during the process drive the evolution of the
population. At each generation, a set of new individu-
als (offspring) are generated by selecting the more fit
individuals. These offspring undergo transformations
(alter step) by means of ”genetic” operators : muta-
tion (perturbation of a solution) and crossover (com-
bination of solutions) (Petrowski and Ben-Hamida,
2017). A new population is then formed by a stochas-
tic selection among offspring proportionally to their
fitness.
2.2 Genetic Programming
Genetic Programming (GP) is a dynamic tree based
representation for EAs. It is applied to evolve com-
plex objects such as sequential sub-programs or lin-
ear functions. GP is considered as the evolutionary
technique having the widest range of domain appli-
cation. Thanks to its great flexibility, GP is able to
solve different classes of machine learning problems
such as data classification and symbolic regression. In
this paper, GP is used to solve two classification tasks
described in section 5.
GP respects the same EAs main steps as EA
as described above. The GP population is an en-
semble of dynamic syntax trees composed of a
set of leaves, called terminals and a set of nodes,
called non-terminals. The non-terminal set may in-
clude arithmetic operations, mathematical functions,
boolean operations, conditional operators (such as
If-Then-Else), functions causing iteration (such as
Do-Until),etc. The terminals are, typically, variable
atoms (i.e, representing the inputs) or constant atoms
or functions with no explicit arguments. To evolve
the GP population, specific initialization and varia-
tion operators are needed. DEAP framework, de-
scribed below, proposes a great variety of mutation
and crossover operators ready to use.
GP has shown its great potential when applied
to supervised learning, especially classification prob-
lems. GP evolves a population of classifiers (genetic
programs) by means of genetic operators through gen-
erations. The general GP loop for supervised learn-
ing is illustrated in Fig 1. Two data sets (at least) are
needed: the training set and the test set. The training
set is used by the algorithm along the learning pro-
cess to evaluate the evolved models (steps 1 and 4 in
Fig 1). The test set is used to assess the accuracy of
the final models (step 6 in Fig 1). The two sets must
be independent such as all test instances are unknown
from the learner. Each pattern is evaluated according
to its corresponding error across the test set. For a
classification problem, the error might be estimated
according to the number of misclassified cases.
2.3 DEAP
DEAP (or Distributed Evolutionary Algorithm in
Python) (Fortin et al., 2012) is a Python framework
released in 2012 at the Vision and Numerical Systems
Laboratory (LVSN) at the Laval university of Canada.
It is freely available and is presented as a rapid proto-
typing and testing framework. It implements several
EA: Genetic Algorithms, Evolution Strategies (ES)
and Genetic Programming.
The core architecture of DEAP is built around dif-
ferent components that define the specific parts of
what is an evolutionary algorithm and what is an evo-
lutionary learning loop (Fig 1). DEAP’s core is com-
posed of three modules: base, creator, and tools. The
base module contains objects and data structures fre-
quently used in Evolutionary Computation that are
not already implemented in the Python standard li-
braries.
To implement functional programming paradigm
used by GP, DEAP propose different data structure
such as lists and trees. For each data structure, a set
of crossover and mutation operator is available. For
this work, we choose the basic GP trees. The non
terminal set, DEAP propose a collection of unary and
binary arithmetic operators, a collection of mathemat-
Extending DEAP with Active Sampling for Evolutionary Supervised Learning
575
Current
Population
Parents
Parents +
offspring
Stop? Final population
Training
sample
Variation
operators
Fitness
evaluation
Initialization
Evaluation
Parental
selection
Survival
Selection
Validation
Test
sample
1
2
3
4
5
No
Yes
6
Figure 1: Genetic Learning Evolutionary loop. Steps 2,3 and 5 concern the traditional EA loop. Steps 1 and 4 need training
data sample. Model validation in step 6 needs test data sample.
ical functions such as logarithmic functions and a set
of logic operators.
3 ACTIVE LEARNING
With Evolutionary data mining techniques, it is pos-
sible to train all models on a single subset S . The
subset S is then used to evaluate all individuals (mod-
els) throughout an evolutionary run. This sampling
approach known as the Static Sampling. If any sam-
pling technique is called by the learner to change the
training set along the evolution, then it is the Active
Learning paradigm that is applied.
Active Learning (Atlas et al., 1990; Cohn et al.,
1994) could be defined as:
‘any form of learning in which the learning
program has some control over the inputs on
which it trains.’
Active learning is implemented essentially with
active sampling techniques. The goal of any sampling
approach is to reduce the original size of the train-
ing set, and thus the computational cost, and enhance
the learner performance. Sampling training data set
has been first used to boost the learning process and
to avoid over-fitting (Iba, 1999). Later, it was in-
troduced for Genetic learners as a strategy for han-
dling large input databases. With the increasing size
of available training datasets, this practice is widely
used.
With active sampling, the training subset is
changed periodically across the learning process. We
distinguish one-level sampling methods using a sin-
gle selection strategy and multi-level sampling (hier-
archical sampling) methods using multiple selection
strategies associated in a hierarchical way.
3.1 One-level Active Sampling
One-level sampling methods use a single selection
strategy based on dynamic criteria, such random se-
lection, weighted selection, incremental selection,
etc. Records in the training subset S are selected be-
fore the application of the genetic operators each η
(η ≥ 1) generations. When η = 1, the population is
evaluated on a different data subset each generation
and the sampling approach is called generation-wise.
If the main goal of the sampling technique is the
reduction of the training fitness cases for the eval-
uation step, the subset selection can be performed
randomly, as described in the following (subsec-
tion 3.1.2). However, if the sampling method has
an additional purpose (avoiding over-fitting, improve
learning quality, handling imbalanced data, etc), it
needs a specific record selection strategy. It is the
case of several sampling approaches in the litera-
ture. For example, the Topology Based Sampling
method (Lasarczyk et al., 2004; Hmida et al., 2016a)
studies relationship between fitness cases in the data
base in order to avoid to select similar fitness cases
in the same training subset. Its objective is to maxi-
mize the generalization ability of the applied machine
learning technique. To overcome imbalance in the
original data base, a series of balanced sampling tech-
niques are proposed in (Hunt et al., 2010). For a clas-
ICSOFT 2021 - 16th International Conference on Software Technologies
576

sification problem, these techniques aim to improve
the classifiers accuracy by correcting the data imbal-
ance within majority and minority class instances in
the selected subset. For this work, we are interesting
on the balanced, random and weighted sampling.
3.1.1 Balanced Sampling (SBS)
The main purpose of balanced sampling is to over-
come imbalance in the original data sets. The well
known techniques in this category are those proposed
by Hun et al. (Hunt et al., 2010) aiming to im-
prove classifiers accuracy by correcting the original
dataset imbalance within majority and minority class
instances. Some of these methods are based on the
minority class size and thus reduce the number of in-
stances. In this paper, we focus on the Static Balanced
Sampling (SBS). SBS is an active sampling method
that selects cases with uniform probability from each
class without replacement until obtaining a balanced
subset. This subset contains an equal number of ma-
jority and minority class instances of the desired size.
3.1.2 Random Sampling (RSS)
The simplest method to choose fitness cases (data
record) to build the training sample S is random. This
stochastic selection helps to reduce any bias within
the full dataset on evolution. Random Subset Selec-
tion (RSS) is the first implementation given by Gath-
ercole et al. (Gathercole and Ross, 1994). In RSS,
at each generation g, the probability of selecting any
case i is equal to P
i
(g) such that :
∀i : 1 ≤ i ≤ T
B
, P
i
(g) =
T
S
T
B
. (1)
where T
B
is the size of the full dataset B and T
S
is the target subset size. The sampled subset has a
fluctuating size around T
S
.
3.1.3 Weighted Sampling (DSS)
Weighted Sampling techniques have two objectives:
(i) focus the algorithm abilities on difficult cases, i.e.
fitness cases frequently unsolved by the best solu-
tions,
(ii) check fitness cases that have not been looked at
for several generations.
The first algorithm in this category is Dynamic Subset
Selection (DSS) (Gathercole and Ross, 1997; Gath-
ercole, 1998). This algorithm is intended to preserve
training set consistency while alleviating its size by
keeping only the difficult cases with ones not selected
for several generations.
To each dataset record is assigned a difficulty de-
gree D
i
(g) and an age A
i
(g) starting with 0 at first
generation and updated at every generation. The dif-
ficulty is incremented for each misclassification and
reset to 0 if the fitness case is solved. The age is equal
to the number of generations since last selection, so it
is incremented when the fitness case has not been se-
lected and reset to 0 otherwise. The resulting weight
W of the i
th
fitness case is calculated as follows:
∀i : 1 ≤ i ≤ T
B
, W
i
(g) = D
i
(g)
d
+ A
i
(g)
a
. (2)
where d is the difficulty exponent and a is the age
exponent. The selection probability of a record i is
biased by its weight W
j
such that:
∀i : 1 ≤ i ≤ T, P
i
(g) =
P
i
(g) ∗ S
∑
T
j=1
W
j
(g)
. (3)
DSS needs three parameters to be tuned: difficulty
exponent, age exponent and target size.
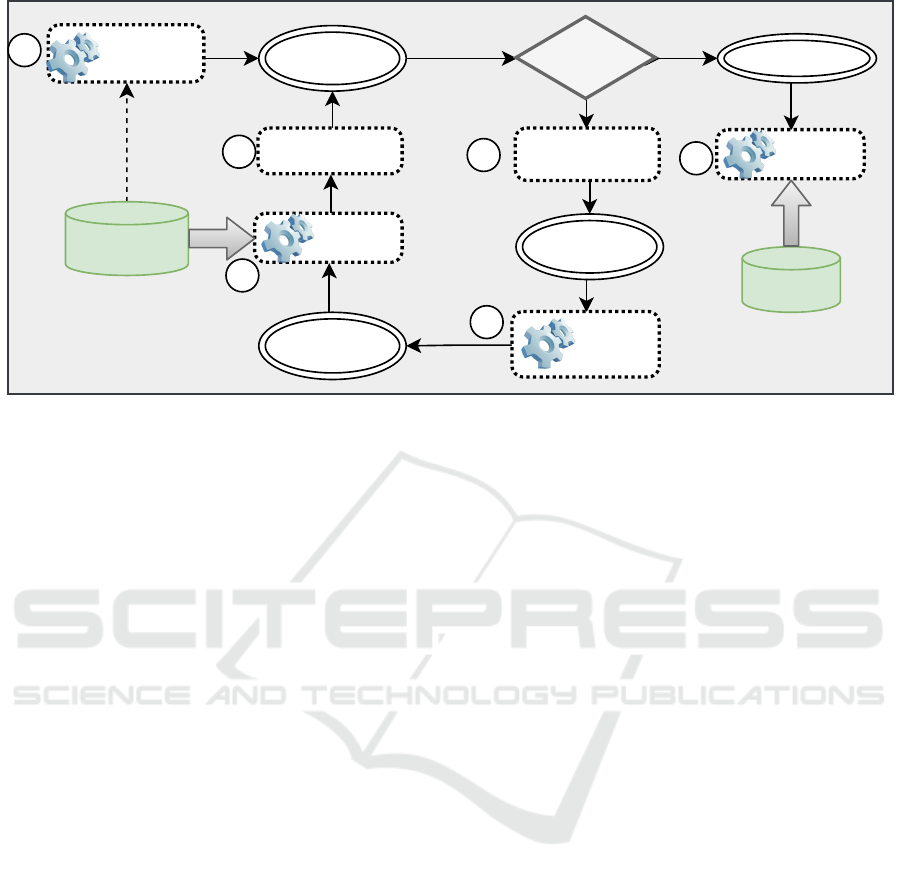
3.2 Multi-level Active Sampling
Multi-level sampling or hierarchical sampling com-
bines several sampling algorithms applied in different
levels. Its objective is to deal with large data sets that
do not fit in the memory, and simultaneously provide
the opportunity to find solutions with a greater gen-
eralization ability. The data subset selections at each
level are independent (Fig 2).
The hierarchical sampling was first experimented
for an intrusion detection problem in (Robert Curry,
2004). RSS and DSS was combined to implement two
level sampling methods: RSS-RSS and RSS-DSS.
Authors proposed also in (Curry et al., 2007) the BB-
DSS techniques where a balanced sampling is applied
in the first level. The aim is to handle classes’ unbal-
ance by generating balanced blocks from the starting
data base. These blocks are then used as input for
the second level sampling. The same approaches are
also experimented in (Hmida et al., 2018) to solve the
Higgs Boson classifications problem.
Figure 2: Multi-level Sampling for Evolutionary Machine
Learning. Level 1 and 2 sampling are iterated within the
Evolutionary loop.
Extending DEAP with Active Sampling for Evolutionary Supervised Learning
577

3.3 Implemented Schema
In this work, four sampling schema are implemented
that are variants from the one-level and multi-level
sampling methods described above:
• 2L-RSS: two level random sampling. At level 0,
balanced bloks are created with a same ratio for
each class using the SBS technique. At level 1, the
random sampling is applied on the current block.
• 2L-DSS: as for 2L-RSS, the weighted sampling at
level 1 is applied on the balanced blocks created
at level 0.
• 3L-RSS-DSS: It is a 3 level sampling technique
based on the 2L-RSS and extended with a third
level where a weighted sampling is applied on the
subset given by RSS.
• 3L-RSS-RSS: It respects the same steps as 3L-
RSS-DSS. However, the random selection is ap-
plied twice, at level 1 and 2.
To implement these techniques, additional parameters
are needed to define the block size, the training set
size and the intermediate training set size for the three
level sampling. Otherwise, the sampling frequency
for each level is also an input parameter to be defined.
4 ENABLING ACTIVE
SAMPLING OVER DEAP
This section details how DEAP is extended with the
different sampling techniques proposed in this work.
First, the whole train set is loaded in a pandas data
frame that is used as an input argument for SBS to
create Blocks (Fig 2 - Level 0).
The code of the SBS and RSS sampling methods
used in this work is given in Fig 3. For the DSS
algorithm, the training data is extended with 3 addi-
tional columns : Age (A), Difficulty (D) and Weight
(W) that are updated each generation according to the
equation 2. The parameters d and a are set to 1 and
3.5 as in (Hmida et al., 2016b). However, the selec-
tion step is slightly modified. Before selecting a new
train set from the input sample, the data frame is di-
vided into two blocks (one for each class) in order to
use both balance and weight criteria for the sampling
method.
4.1 Extending DEAP with 2 Level
Active Sampling
As introduced in section 3, all active sampling tech-
niques are applied on a balanced data (BBtrain) hav-
ing BBSize records. It is created at level 0 of each
sampling algorithm according to the following proce-
dure. This code is then integrated in the GP loop.
#each g_level0 generations
if g(\% g_level0)==0
BBtrain=SBS([trainSet,BBSize)
To implement the level 1 sampling, according to
the configuration, one method from RSS, SBS and
DSS is applied on the balanced block BBtrain each
g
level1 generations.
#each g_level1 generations
if g(\% g_level1)==0
#RSS or SBS or DSS
finalSet=BBtrain.RSS(setSize)
4.2 Extending DEAP with 3 Level
Active Sampling
With the three-level sampling, an additional sampling
step is performed just after the level 1 such as the final
training sample is selected from an intermediate data
set (intermSet) generated from BBtrain randomly or
with a balanced sampling.
BBtrain −→ IntermSet −→ finalSet
(BBsize) (IntSetSize) (setSize)
The aim of this additional step is to train GP popu-
lation on a smaller sample in order to further reduce
the GP computational cost and the DSS sampling cost
when it applied. At each generation, the population of
classifiers is evaluated on the f inalSet sample.
5 APPLICATION
To assess the efficiency of the active sampling for su-
pervised learning over DEAP, we selected two data
sets with different characteristics and difficulties.
ODS Data Set for Occupancy Detection in
Buildings:
Occupancy detection in an office room uses data
from light, temperature, humidity and CO
2
sensors
(Candanedo and Feldheim, 2016a). Ground-truth oc-
cupancy was obtained from time stamped pictures
that were taken every minute. The Occupancy is
the response variable indicated with 0 and 1 (occu-
pied/empty). Occupancy detection using the ODS
ICSOFT 2021 - 16th International Conference on Software Technologies
578

def RSS(InputSet,setSize):
OutputSet=InputSet.sample(setSize) #select randomly a sample of setsize instances
return OutputSet
def SBS(InputSet,setSize):
# Create two random sub-samples from each class
OutputSet_class0=InputSet[InputSet.iloc[:,0]==0].sample(setSize//2)
OutputSet_class1=InputSet[InputSet.iloc[:,0]==1].sample(setSize//2)
# contact the two sub-samples
OutputSet=pd.concat(OutputSet_class0,OutputSet_class1)
return OutputSet
Figure 3: DEAP implementing RSS and SBS sampling methods.
def DSS(InputSet,setSize):
#update weights of all exemplars
InputSet.iloc[:,-1] = InputSet.iloc[:,-2]**d + InputSet.iloc[:,-3]**a
InputSet_class0=InputSet[InputSet.iloc[:,0]==0]
InputSet_class1=InputSet[InputSet.iloc[:,0]==1]
IntputSet_class0.sort_values(by = 'W', ascending = False)
IntputSet_class1.sort_values(by = 'W', ascending = False)
OutputSet = pd.concat(IntputSet_class0.iloc[:setSize//2],
IntputSet_class1.iloc[:setsize//2])
return OutputSet
Figure 4: DEAP implementing DSS sampling method.
data set is a medium difficulty classification problem
that has been solved with different machine learning
techniques. The classification accuracy might reach
99% with some techniques such as SVM (Elkhoukhi
et al., 2018). The purpose of using this data in the
present work is to study the effect of adding one-
level and multi-level sampling techniques to a power-
ful machine learning technique such that GP to solve
a non difficult classification problem.
HTRU Data Set for Pulsar Detection:
Pulsars are a rare type of Neutron star that produce
radio emission detectable on Earth. They are of con-
siderable scientific interest as probes of space-time,
the inter-stellar medium, and states of matter (Lyon
et al., 2016a). As pulsars rotate, their emission beam
sweeps across the sky, and when this crosses our line
of sight, produces a detectable pattern of broadband
radio emission. As pulsars rotate rapidly, this pat-
tern repeats periodically. Thus pulsar search involves
looking for periodic radio signals in observational
data.
Machine learning classifiers are applied for pulsar
detection since 2010. A state of the art is published in
(Wang et al., 2019). The first data base made publicly
available contains 22 features. Lyon et al. (Lyon et al.,
2016b) demonstrated that some features may be sub-
optimal for machine learning classifier and proposed
the HTRU data set with 8 features. It is this second
data base studied in the present work.
The HTRU data set contains 16,259 spurious ex-
amples caused by RFI/noise (the majority negative
class), and 1,639 real pulsar examples . These ex-
amples have all been checked by human annotators.
Classification machine learning tools are used to au-
tomatically label pulsar candidates to facilitate rapid
analysis. The ability of machine learning technique
applied for pulsar detection is proved in several works
(Azhari et al., 2020).
Table 1: Data sets information.
Data Attributes Set Negative Train
Set size examples data
ODS 5 Real Values 8143 6414 6000
HTRU 8 Real Values 17898 16259 14000
5.1 GP Settings and Performance
Measures
GP are trained on the both data sets using parameters
summarized in Table 2.
For each data set, five series of tests are per-
formed. For each series, a different configuration is
Extending DEAP with Active Sampling for Evolutionary Supervised Learning
579

Table 2: GP parameters.
Parameter Value
Population size 200
Generations number 150
Tournament size 4
Crossover probability 0.5
Mutation probability 0.2
GP Tree depth 3
Fitness Classification error
Selection operator Selection by tournament
Crossover operator Point crossover
applied according to the sampling strategy. For each
data set, GP is extended with one of the following
configurations:
• No Sampling : GP is run without active learning.
The whole data set is seen by each classifier at
each generation.
• Two Level Sampling: GP is extended with a two
level sampling using SBS a the first level and RSS
(2L-RSS) or DSS (2L-DSS) at the second level.
• Three Level Sampling: GP is extended with a
three level sampling using the same hierarchy as
Two Level Sampling and adding RSS (3L-RSS-
RSS) or DSS (3L-RSS-DSS) at the last level.
Ten runs with different seeds are performed for each
configuration. By the end of each run, the confusion
matrix of best classifier according to the test set is
recorded and its accuracy and recall are computed ac-
cording to the following formula.
Accuracy =
True Positives + True Negatives
Total examples
. (4)
Recall =
True Positives
True Positives + False Negatives
. (5)
where True Positives and True Negatives are the
numbers of exemplars correctly classified in respec-
tively class 1 and 0, False Positives and False Nega-
tives are the numbers of exemplars incorrectly classi-
fied.
Additional parameters are set for the sampling
techniques to define the size of the training set and
the sampling frequency at each level. Their values are
summarized in Table 3.
Experiments are performed on an Intel i7 (4
Core) workstation with 16GB RAM running under
Windows 64-bit Operating System.
5.2 Results and Discussion
The main objective of an active sampling technique is
to improve the performance of the learning algorithm
according to either the quality of the obtained results
by maximizing the generalization ability or accord-
ing to the computational cost by minimizing the run
time. Both measures are recorded for each run. Ta-
ble 4 and 5 summarize the best and average accuracy,
the best computing time and the best recall for each
configuration.
Three main observations can be deduced from the
experimental results. First, introducing a sampling
technique to GP helps reducing the training cost up to
10 times, and often with improved performance. Fig 5
shows the relative time saving according to the com-
puting time of the standard GP without sampling. It is
near 90% for the ODS data set and 86% for the HTRU
data set. The lower computing cost is recorded for the
sampling techniques based on the RSS method. DSS
algorithm differs from RSS by updating certain sam-
pling parameters (age and difficulty) needed for the
exemplar selection, which explains the difference of
the computation time.
Figure 5: The Relative Time Saving for the four Sampling
approaches (2L-RSS, 2L-DSS, 2L-RSS-RSS and 2L-RSS-
DSS) according to the best computing time recorded for the
Standard GP.
Second, training GP on smaller samples with ac-
tive learning do not affect the quality of the ob-
tained classifiers. Indeed, the average and best accu-
racy/recall are either quite close or better with active
sampling. Thus, we can state that any active sam-
pling technique is able to both reduce the computa-
tional cost and improve the generalization ability of
the classifiers compared to the standard GP.
Third, using specific measurements for sample se-
lection such as difficulty and age with DSS are ex-
pensive comparing to the random selection with RSS,
without bringing a significant improvement in the
cases of the ODS and HTRU data sets. On the con-
trary, for the case of the HTRU data set, which is a
more complex base than ODS data set, RSS performs
better with 2L and 3L sampling.
Otherwise, it is interesting to compare also the
performance of the 2L and 3L sampling strategies.
ICSOFT 2021 - 16th International Conference on Software Technologies
580

Table 3: Sampling parameters.
Sampling method Parameter Level 0 Level 1 Level 2
No Sampling (1L) size 6000 – –
2L-Sampling size 2000 200 –
frequency (nb generations) 30 (ODS) - 50 (HTRU) 1 –
3L-Sampling size 2000 1000 200
frequency(nb generations) 30 (ODS) - 50 (HTRU) 5 2
Table 4: Results on ODS data set.
Test case Computing time (en s) Best Accuracy Avg Accuracy Best Recall Avg Recall
No sampling 3209,42 97,8% 97% 100% 99,9%
2L-RSS 345,437 97,9% 97,6% 99,9% 99%
2L-DSS 465,53 98% 97,5% 100% 99,5%
3L-RSS-RSS 336,15 97,9% 97% 99,9% 97,4%
3L-RSS-DSS 466,54 97,9% 97,1% 100% 97,5%
Table 5: Results on HTRU data set.
Test case Computing time (en s) Best Accuracy Avg Accuracy Best Recall Avg Recall
No sampling 5313,81 97,8% 97% 92% 88%
2L-RSS 764,183 98,9% 97,3% 89% 84%
2L-DSS 1047,20 98% 96,4% 92% 89%
3L-RSS-RSS 751,607 98,7% 97,2% 92% 86%
3L-RSS-DSS 1038,084 98,33% 96,21% 83% 80%
When increasing the number of levels for the hierar-
chical sampling, it is expected to note a decreasing
quality. However, the accuracy is improved in
the case of 3L-RSS-RSS for both data sets, and
unchanged or improved in the case of 3L-RSS-DSS.
Results in Related Works. Occupancy detection us-
ing the same ODS data set has been studied in
(Candanedo and Feldheim, 2016b) where different
machine learning techniques were applied: Linear
Discriminant Analysis, Classification and Regression
Trees and Random Forest models. Each method is
trained with different selected features. Accuracy ob-
tained on test set with all experimented configurations
varies between 95% to 99%. Results given by GP
with active sampling are very close (or better in the
case of some configurations) than those published in
(Candanedo and Feldheim, 2016b).
The first machine learning technique applied to
detect pulsars on the Lyon et al. HTRU data set is
the Gaussian Hellinger very fast Decision Tree (Lyon
et al., 2016b) with a precision equal to 89.9% and a
recall around 83%. These results are improved in the
study published in (Wang et al., 2019) where the pre-
cision and recall reach respectively 95% and 87.3%
with the XG-Boost classifier and 96% and 87% with
Random Forest classifier. The best accuracy value
obtained by the fuzzy-K Nearest Neighbors method
published in (Mohamed, 2018) is near 98%, which is
the best performance published for this classification
problem. Comparing these results with those given
by GP in Table 5, it is clear that active learning ap-
plied to evolutionary machine learning such as GP is
a promising track towards improving pulsar detection
models.
6 CONCLUSION
This paper studies the effect of active learning on Ge-
netic Programming as an evolutionary data mining
technique. One-level and multi-level sampling strate-
gies using random and weighted sampling are imple-
mented on DEAP, a Python framework for evolution-
ary algorithms. The algorithm is then applied to clas-
sify pulsars and to detect building occupation. The ex-
perimental study yields to the following conclusion.
First, any active sampling technique is able to in-
duce better generalizing classifiers compared to the
standard GP using the full training set. Second, a
simple sampling technique, such as RSS has very low
computational cost and it is able to reach higher per-
formance than sampling techniques using additional
information such as difficulty and age.
Active learning paradigm based on data sampling
is a promising solution that should be considered to
scale evolutionary data mining to complex and large
data sets. This paradigm could be combined with
Extending DEAP with Active Sampling for Evolutionary Supervised Learning
581

other paradigms such as Local learning or Ensem-
ble learning for more powerful machine learning tech-
niques.
REFERENCES
Atlas, L. E., Cohn, D., and Ladner, R. (1990). Train-
ing connectionist networks with queries and selective
sampling. In Touretzky, D., editor, Advances in Neu-
ral Information Processing Systems 2, pages 566–573.
Morgan-Kaufmann.
Azhari, M., Abarda, A., Alaoui, A., Ettaki, B., and Ze-
rouaoui, J. (2020). Detection of pulsar candidates
using bagging method. Procedia Computer Science,
170:1096–1101.
Candanedo, L. M. and Feldheim, V. (2016a). Accurate oc-
cupancy detection of an office room from light, tem-
perature, humidity and co2 measurements using statis-
tical learning models. Energy and Buildings, 112:28–
39.
Candanedo, L. M. and Feldheim, V. (2016b). Accurate oc-
cupancy detection of an office room from light, tem-
perature, humidity and co2 measurements using statis-
tical learning models. Energy and Buildings, 112:28–
39.
Cohn, D., Atlas, L. E., Ladner, R., and Waibel, A. (1994).
Improving generalization with active learning. In Ma-
chine Learning, pages 201–221.
Curry, R., Lichodzijewski, P., and Heywood, M. I. (2007).
Scaling genetic programming to large datasets using
hierarchical dynamic subset selection. IEEE Trans-
actions on Systems, Man, and Cybernetics: Part B -
Cybernetics, 37(4):1065–1073.
Elkhoukhi, H., NaitMalek, Y., Berouine, A., Bakhouya, M.,
Elouadghiri, D., and Essaaidi, M. (2018). Towards
a real-time occupancy detection approach for smart
buildings. Procedia computer science, 134:114–120.
Fortin, F.-A., De Rainville, F.-M., Gardner, M.-A., Parizeau,
M., and Gagn
´
e, C. (2012). DEAP: Evolutionary algo-
rithms made easy. Journal of Machine Learning Re-
search, 13:2171–2175.
Gathercole, C. (1998). An Investigation of Supervised
Learning in Genetic Programming. Thesis, Univer-
sity of Edinburgh.
Gathercole, C. and Ross, P. (1994). Dynamic training sub-
set selection for supervised learning in genetic pro-
gramming. In Parallel Problem Solving from Nature -
PPSN III, volume 866 of Lecture Notes in Computer
Science, pages 312–321. Springer.
Gathercole, C. and Ross, P. (1997). Small populations over
many generations can beat large populations over few
generations in genetic programming. In Koza, J. R.,
Deb, K., Dorigo, M., Fogel, D. B., Garzon, M., Iba,
H., and Riolo, R. L., editors, Genetic Programming
1997: Proc. of the Second Annual Conf., pages 111–
118, San Francisco, CA. Morgan Kaufmann.
Hmida, H., Hamida, S. B., Borgi, A., and Rukoz,
M. (2016a). Hierarchical data topology based
selection for large scale learning. In Ubiqui-
tous Intelligence & Computing, Advanced and
Trusted Computing, Scalable Computing and Com-
munications, Cloud and Big Data Computing,
Internet of People, and Smart World Congress
(UIC/ATC/ScalCom/CBDCom/IoP/SmartWorld),
2016 Intl IEEE Conferences, pages 1221–1226.
IEEE.
Hmida, H., Hamida, S. B., Borgi, A., and Rukoz, M.
(2016b). Sampling methods in genetic programming
learners from large datasets: A comparative study. In
Angelov, P., Manolopoulos, Y., Iliadis, L. S., Roy, A.,
and Vellasco, M. M. B. R., editors, Advances in Big
Data - Proceedings of the 2nd INNS Conference on
Big Data, October 23-25, 2016, Thessaloniki, Greece,
volume 529 of Advances in Intelligent Systems and
Computing, pages 50–60.
Hmida, H., Hamida, S. B., Borgi, A., and Rukoz, M. (2018).
Scale genetic programming for large data sets: Case of
higgs bosons classification. Procedia Computer Sci-
ence, 126:302 – 311. the 22nd International Confer-
ence, KES-2018.
Hunt, R., Johnston, M., Browne, W. N., and Zhang, M.
(2010). Sampling methods in genetic programming
for classification with unbalanced data. In Li, J., edi-
tor, Australasian Conference on Artificial Intelligence,
volume 6464 of Lecture Notes in Computer Science,
pages 273–282. Springer.
Iba, H. (1999). Bagging, boosting, and bloating in ge-
netic programming. In Banzhaf, W., Daida, J., Eiben,
A. E., Garzon, M. H., Honavar, V., Jakiela, M., and
Smith, R. E., editors, Proc. of the Genetic and Evolu-
tionary Computation Conf. GECCO-99, pages 1053–
1060, San Francisco, CA. Morgan Kaufmann.
Lasarczyk, C. W. G., Dittrich, P., and Banzhaf, W. (2004).
Dynamic subset selection based on a fitness case
topology. Evolutionary Computation, 12(2):223–242.
Lyon, R. J., Stappers, B. W., Cooper, S., Brooke, J. M., and
Knowles, J. D. (2016a). Fifty years of pulsar candidate
selection: from simple filters to a new principled real-
time classification approach. Monthly Notices of the
Royal Astronomical Society, 459(1):1104–1123.
Lyon, R. J., Stappers, B. W., Cooper, S., Brooke, J. M., and
Knowles, J. D. (2016b). Fifty years of pulsar candi-
date selection: from simple filters to a new principled
real-time classification approach. Monthly Notices of
the Royal Astronomical Society, 459(1):1104–1123.
Mohamed, T. M. (2018). Pulsar selection using fuzzy knn
classifier. Future Computing and Informatics Journal,
3(1):1–6.
Petrowski, A. and Ben-Hamida, S. (2017). Evolutionary
Algorithms. Computer Engineering: Metaheuristics.
Wiley.
Robert Curry, M. H. (2004). Towards efficient training
on large datasets for genetic programming. Lecture
Notes in Computer Science, 866(Advances in Artifi-
cial Intelligence):161–174.
Wang, Y., Pan, Z., Zheng, J., Qian, L., and Li, M. (2019). A
hybrid ensemble method for pulsar candidate classifi-
cation. Astrophysics and Space Science, 364.
ICSOFT 2021 - 16th International Conference on Software Technologies
582
