
Genetic Programming based Constructive Algorithm with Penalty
Function for Hardware/Software Cosynthesis of Embedded Systems
Adam Górski and Maciej Ogorzałek
Department of Information Technologies, Jagiellonian University in Cracow,
Prof. Stanisława Łojasiewicza 11, Cracow, Poland
Keywords: Artificial Intelligence, Embedded Systems, Genetic Programming, Penalty Function, Hardware/Software
Co-Synthesis.
Abstract: In this work we present a constructive genetic programming method with penalty function for hw/sw
cosynthesis of embedded systems. The genotype is a tree which contains in its nodes system construction
options. Unlike existing solutions in this approach individuals which violate time constrains are investigated
during evolution process. Therefore the algorithm is even more able to escape local minima of optimizing
parameters.
1 INTRODUCTION
Artificial intelligence (AI) (Shastri et al. 2021) is
widely used in computer science. Method of AI like:
evolution algorithms and multi-agent systems (Jin et
al. 2021) were applied to solve many problems. One
of those are optimization problems like: hardware
design (Dick et al. 1998), traveling salesman problem
(Lust and Teghem 2010) Multi-skill resource-
constrained project scheduling problem (Lin et al.
2020), and many others.
Embedded system (Martins et al. 2020) is
a computer system consisted of hardware elements
optimized to execute appropriate tasks. According to
De Michelli and Gupta (De Michelli and Gupta 1997)
embedded system design can be divided onto three
phases: modelling, verification and implementation.
In (Górski and Ogorzałek 2016) authors propose
another phase – assignment of unexpected tasks.
Hardware/software co-syntesis (Yen and Wolf 1995,
Oh and Ha 2002) is a process of concurrent
generation of an architecture of embedded system and
its software. The goal of the process is to find optimal
architecture with optimal task assignment. The
architecture can be composed of two groups of
resources: Processing Elements (PEs) which are
responsible for tasks execution and Communication
Links (CLs) which provide communication between
connected PEs.. There are two kinds of PEs:
Programmable Processors (PPs) able to execute more
than one task and Hardware Cores (HCs) which are
specialized to execute only one task. Most of co-
synthesis algorithms can be divided on two groups –
constructive (Deniziak and Górski 2008, Górski and
Ogorzałek 2014a, Srinivasan and Jha 1995) and
iterative improvement (Oh and Ha 2002, Górski and
Ogorzałek 2021). Constructive algorithms build
system step by step making decisions separately for
each part. They have low complexity but are able to
stop in local minima of optimizing parameters.
Iterative improvement algorithms start from
suboptimal solution and by local changes try to
improve the quality of the system. The initial solution
in such methods is usually the fastest implementation
of all the tasks. In such a solution every task is usually
executed by another HC. Genetic algorithms (Conner
et. al 2005) were also applied to co-synthesis
problem. They can provide an acceptable result in
reasonable time and are able to escape local minima
of optimizing parameters. However the disadvantage
of those methods is that obtained results are sensitive
to change of genetic parameters. Very good results
were obtained using genetic programming (GP)
(Górski and Ogorzałek 2021). In (Deniziak and
Górski 2008) authors propose a constructive GP
method. One of the biggest disadvantages of the
method was that every generated individual could not
violate time constrains. Therefore the algorithm had
smaller chance to escape local minima of optimizing
parameters. The time of computation was also
Górski, A. and Ogorzałek, M.
Genetic Programming based Constructive Algorithm with Penalty Function for Hardware/Software Cosynthesis of Embedded Systems.
DOI: 10.5220/0010605005830588
In Proceedings of the 16th International Conference on Software Technologies (ICSOFT 2021), pages 583-588
ISBN: 978-989-758-523-4
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
583

increasing. In (Górski and Ogorzałek 2014b) an
iterative improvement algorithm for co-synthesis
problem was proposed. The algorithm builds initial
population by starting from the fastest
implementation. The next generations are obtained
using genetic operators: mutations, cloning and
crossover. However this method also do not use
a penalty function. Therefore only valid individuals
are used to generate the final solution. In this paper
we present a Genetic Programming method to
hardware/software co-synthesis of distributed
embedded system which uses the penalty function
during generation of the results. Unlike other
algorithms our method during evolution process
investigates also individuals which violate time
constrains. Therefore it is a greater chance that
algorithm will not stop in local minima of optimizing
parameters.
The paper is organized as follows: section 2
describes genetic programming – types and
application. In section 3 the representation of
embedded system is presented. Section 4 includes the
description of the algorithm. Experimental results are
given in section 5. The last section summarize the
paper and indicates the direction of future work.
2 GENETIC PROGRAMMING
Genetic Programming (Suganuma et al. 2020) is an
extension of Genetic Algorithm (Nayak and Panda,
2020). The main difference between those
methodologies is that in GP genotype is a tree. The
tree, in its nodes, includes functions.
In linear genetic programming (Zhang et al. 2020)
the tree is represented in linear form.
In cartesian genetic programming (Miller, 2011)
the genotype is a graph. Thus the genetic operators
needed to be modified.
Multigene Genetic Programming (Riahi-Madvar
et al. 2019) evolve strings of genes. However every
gene is a tree in which nodes are functions.
Developmental Genetic Programming (DGP)
(Koza et al. 1997) starts with embryo. Embryo is the
first node in genotype tree. Every other node contains
function which modifies the embryo. This type of GP
is often used for hardware design (Deniziak and
Górski 2008, Górski and Ogorzałek 2017, Górski and
Ogorzałek 2021). This kind of GP was also used in
this paper.
3 PRELIMINARIES
Embedded system is represented as a task graph G =
(T, E). This representation is one of the most popular.
In the representation each node T
i
in a graph is a task
executed by the system. Each edge describes an
amount of data (d
ij
) that need to be transferred
between two connected tasks T
i
and T
j
. On figure 1
the example of task graph is presented.
T2
T0
T1
T3
22
10
25
60
T6 T7
28
T5 T4
11
31
Figure 1: Example of task graph.
The example consists of eight tasks: T0, T1, T2,
T3, T4, T5, T6 and T7. Tasks T1, T2 and T4, T5, T6,
T7 are parallel. Tasks T1 and T2 can start their
execution after finishing of T0 execution. Tasks T3
and T5 can be started only if T2 is finished. Tasks T6
and T7 can be executed after T3.
The transmission time t
i,j
is dependent on the
bandwidth (b
u
) of a communication link used to
connected PEs. It is described by the following
formula:
u
ji
ji
b
d
t
,
,
=
(1)
The execution of a task is characterized by the cost
(c) and time (t). We assume that a database which
include all times and cost of execution for every tasks
on every PEs is given. The database also contains cost
of each PE and cost of connection PEs using each
CLs. In table 1 the example of database for a graph
from figure 1 is presented. In the example there are
four kinds of possible PEs. Two of them are PPs and
two of them are HCs. The cost (C) of PP1 is 100, the
cost of PP2 is 300. The cost of HCs is added to a cost
of tasks’ execution. PEs can be connected using one
CL. The bandwidth of the CL is 13. Cost of
connection of PP1 to CL1 is equal to 6. The cost of
ICSOFT 2021 - 16th International Conference on Software Technologies
584
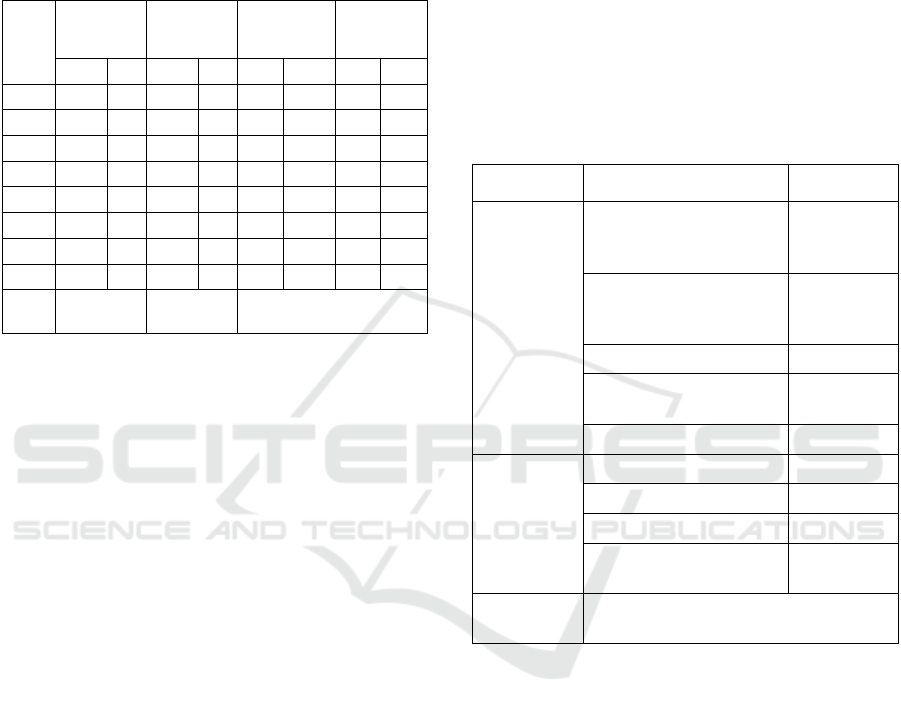
connection of PP2 is equal to 3. The costs of
connection of every HCs to CL1 are equal to 25. If
one or more PEs execute more than one task, then
those tasks need to be scheduled. We decided to use
list scheduling.
Table 1: Example of resource database.
Task
PP1
C=100
PP2
C=300
HC1 HC2
t c t c t c t c
T0 12 6 15 4 10 200 3 160
T1 11 8 23 10 7 90 12 80
T2 30 2 21 8 6 100 5 140
T3 18 4 20 3 4 150 1 350
T4 26 10 22 5 3 200 2 240
T5 22 5 36 12 6 90 8 70
T6 34 11 44 9 11 88 13 80
T7 45 15 30 16 9 180 10 190
CL1,
b=13
c=6 c=3 c=25
To estimate the quality of individuals we use the
fitness function (F). We decided that during evolution
process, to avoid stopping in local minima of
optimizing parameters, every generated individuals
can be used. Therefore every individuals which
violate the time constrains must be given a penalty.
The penalty is depended on the violation time. The
function is depended on time of the solution (t), its
cost (C
s
) and given penalty (PF). It is described by the
following formula:
Fs
PptlCkF *** ++=
(2)
Parameters k, l and p are given by the designer.
There are no dependencies between the parameters k,
l and p. The time of the solution is a time after which
the last task finishes its execution. The cost of
embedded system can be calculated as:
====
++=
v
z
P
y
PCCL
n
y
y
m
z
PEs
u
yuz
ccCC
11
,
11
(3)
Where n is a number of tasks in a task graph, m is
a number of PP in solution, u is a number of CLs
connected to v PEs.
Penalty can be calculated as follows:
)(
max
ttP
F
−=
(4)
where t
max
is a time constrain and t is a time of
execution of all the tasks for investigated solution.
4 THE ALGORITHM
The algorithm which is presented in this paper is
constructive method. Therefore design decisions are
made for each task separately. The genotype is a tree.
To be sure that every task is executed the genotype is
a spanning tree of given task graph. The first node in
the tree is embryo. Embryo is a random
implementation of the first task. The rest of nodes
contains genes. In our solution genes are system
construction options. The options are presented in
table 2.
Table 2: Options for building system.
Step Option Probability
PE
a. The fastest
implementation of the
task
0.2
b. The cheapest
implementation of the
task
0.2
c. min (t*c) 0.2
d. The same as
predecessor
0.2
e. The rarest used PP 0.2
CL a. The fastest CL 0.2
b. The cheapest CL 0.2
c. The rarest used 0.3
d. The same as
predecessor
0.3
Task
scheduling
list scheduling
Unlike others constructive methods (Deniziak and
Górski 2008) our algorithm do not separate options
for used PEs and options for allocating new ones. The
algorithm independently makes a decision if it is
necessary to allocate a new PE.
The number of individuals in each population is
described by the following formula:
e*n* =
α
Π
(5)
where n is number of tasks (nodes in the task
graph), e is possible number of embryos.
After generating an initial population the
algorithm builds new individuals using genetic
operators: selection, crossover, mutation and cloning.
In this paper we decided to use rank selection. Every
generated individuals are ranked by the minimum
value of fitness function. The individuals have
Genetic Programming based Constructive Algorithm with Penalty Function for Hardware/Software Cosynthesis of Embedded Systems
585

probability (P) depended on the position on the rank
list (r):
Π
−Π
=
r
P
(6)
The probability describes the chance that every
individual will be used during evolution process.
Individuals with lower value of fitness function have
greater probability of being selected, however the
solutions with higher value are not necessary rejected.
Mutation randomly selects (using selection
operator) Ὠ individuals:
ΠΩ *=
δ
(7)
For each individual one node is selected
randomly. Mutation substitutes the option in selected
node on another using available options (from table
2).
Crossover chooses Ψ individuals. Selected
individuals are connected in pairs. Then a crossing
point is selected randomly. The point is the same for
both individuals in each pair. The operator substitutes
subtrees between the solutions. The number of
individuals created by crossover is equal to the
following formula:
ΠΨ *=
γ
(8)
Cloning operator copies Φ individuals to the next
population. formula:
ΠΦ *=
β
(9)
To have the same number of individuals in each
population must be satisfied the condition:
β + γ + δ = 1
(10)
The algorithm stops if in ε next generations better
individual was not found.
5 FIRST RESULTS
To check the quantity of presented algorithm we
decided to use benchmarks with 10, 20 and 30 nodes.
The results are presented in table 3 below. For each
graph 10 runs were made and the best obtained results
were put in table 3. They were compared with Genetic
Programming algorithm proposed by Deniziak and
Górski (Deniziak and Górski 2008) which is also
a developmental genetic programming constructive
method. The parameters were set as follows: α=2,
β=0.2, γ= 0.7, δ=0.1, ε=3, k=8, l=1, p=4.
Table 3: The results.
Algorithm Graph t c Gen. F
DGP08 10 479 1667 3 13815
20 970 3575 9 29570
30 1273 6323 28 51857
DGP2021 10 531 2095 15 17322
20 937 2749 29 22929
30 937 6035 44 49217
The time constrains for each graph were set as
follows: graph with 10 nodes – 500, graph with 20
nodes – 1000, graph with 30 nodes – 1300. As it can
be observed in table 3 the results obtained by the
presented algorithm are much better in most of cases
than obtained by DGP08. Only for a graph with 10
nodes the best solution obtained by presented
algorithm has fitness function equal to 17322,
meanwhile the best solution obtained by DGP08 has
fitness function equal to 13815. For graphs with 20
nodes presented algorithm generated results with
fitness function equals to 22929. For that graph
presented algorithm generated individual with better
value of time (937) and cost (2749) than DGP08 (cost
equal to 3575, and time equal to 970). What is worth
to underline using the presented approach during the
evolution process despite the fact that in some of the
generations best individuals violated time constrain,
the final solution has time under maximum value. The
same situation can be observed for graph with 30
nodes. The time of a final solution obtained by
presented algorithm (937) does not violate time
constrains. It is also lower than time obtained using
DGP08 (1273). The solution generated by presented
approach has also lower value of cost (6035) than
result obtained by DGP08 (6323). This suggest that
algorithm presented in this paper has greater ability to
escape local minima of optimizing parameters.
6 CONCLUSIONS AND FUTURE
WORK
In this paper a constructive genetic programming
method for hardware/software cosynthesis of
distributed embedded system was presented. The
method uses a penalty function. Some of the
individuals in each generation can violate time
constrains. Therefore those individuals can be used to
construct next generations. Thus the algorithm is
more able to escape local minima of optimizing
parameters. The first experimental results indicates
ICSOFT 2021 - 16th International Conference on Software Technologies
586

bigger effectiveness of presented algorithm than
DGP08. Only in one case better results were
generated by DGP08 algorithm – for graph with 10
nodes. However more experiments must be
performed using presented algorithm to be sure why
in such a case the results were worse. Maybe with
different value of genetic parameters or another
values of probability of system construction options
results could be better even for graph with 10 nodes.
Therefore more experiments are needed to find the
best values of genetic operators. In future work we
also plan to check another combination of system
construction options and different genetic operators
and their impact on final results.
REFERENCES
Shastri B. J., Tait A. N., De Lima T. F., Pernice W. H. P.,
Bhaskaran H., Wright C. D., Prucnal P. R, 2021.
Photonics for artificial intelligence and neuromorphic
computing. In Nature Photonics, vol. 15, no. 2,
pp. 102–114, (online), available: https://doi.org/
10.1038/s41566-020-00754- .
Jin X., Lü S. Yu J., 2021. Adaptive NN-Based Consensus
for a Class of Nonlinear Multiagent Systems With
Actuator Faults and Faulty Networks. In IEEE
Transactions on Neural Networks and Learning
Systems, doi: 10.1109/TNNLS.2021.3053112.
Dick R. P., Jha N. K., 1998. MOGAC: a multiobjective
Genetic algorithm for the Co-Synthesis of
Hardware-Software Embedded Systems. In IEEE
Trans. on Computer Aided Design of Integrated
Circiuts and systems, vol. 17, No. 10.
Lust, T. Teghem J, 2010 The multiobjective traveling
salesman problem: a survey and a new approach. In
Advances in Multi-Objective Nature Inspired
Computing. Springer. p. 119-141.
Lin J, Zhu L, Gao K., 2020. A genetic programming hyper-
heuristic approach for the multi-skill resource
constrained project scheduling problem. In Expert Syst
Appl 140. https://doi.org/10.1016/j.eswa.2019.112915.
Martins J., Tavares A., Solieri M., Bertogna M., Pinto S.,
2020. Bao: A lightweight static partitioning hypervisor
for modern Multi-Core Embedded Systems. In
Workshop on Next Generation Real-Time Systems.
De Micheli, G., Gupta, R., 1997. Hardware/software
co-design. In Proceedings IEEE 95.3 (Mar). IEEE.
Górski, A., Ogorzałek, M.J., 2016. Assignment of
unexpected tasks in embedded system design process.
Microprocessors and Microsystems, Vol. 44,
pp. 17-21, Elsevier.
Yen, T., Wolf, W., 1995. Sensivity-Driven Co-Synthesis of
Distributed Embedded Systems. In Proceedings of the
International Symposium on System Synthesis.
Srinivasan, S., Jha, N.K., 1995. "Hardware-Software Co-
Synthesis of Fault-Tolerant Real-Time Distributed
Embedded Systems", In Proceedings European Design
Automation Conference. pp. 334-339.
Oh, H., Ha, S., 2002. Hardware-software cosynthesis of
multi-mode multi-task embedded systems with real-
time constraints. In Proceedings of the International
Workshop on Hardware/Software Codesign,
pp. 133–138.
Górski, A., Ogorzałek, M.J., 2021. Genetic programming
based iterative improvement algorithm for HW/SW
cosynthesis of distributted embedded systems. In
Proceedings of the 10th International Conference on
Sensor Networks.
Deniziak, S., Górski, A., 2008. Hardware/Software Co-
Synthesis of Distributed Embedded Systems Using
Genetic programming. In Proceedings of the 8th
International Conference Evolvable Systems: From
Biology to Hardware, ICES 2008. Lecture Notes in
Computer Science, Vol. 5216. SPRINGER-VERLAG.
Górski, A., Ogorzałek, M.J., 2014a. Adaptive GP-based
algorithm for hardware/software co-design of
distributed embedded systems. In Proceedings of the
4th International Conference on Pervasive and
Embedded Computing and Communication Systems,
Lisbon, Portugal.
Górski, A., Ogorzałek, M.J., 2014b. Iterative improvement
methodology for hardware/software co-synthesis of
embedded systems using genetic programming. In
Proceedings of the 11th Conference on Embedded
Software and Systems (Work in Progress Session),
Paris, France.
Conner, J., Xie, Y., Kandemir, R., Link, G., Dick, R., 2005.
FD-HGAC: A Hybrid Heuristic/Genetic Algorithm
Hardware/Software Co-synthesis Framework with
Fault Detection. In Proceedings of Asia South Pacific
Design Automation Conference (ASP-DAC), pp. 709-
712.
Suganuma M., Shirakawa S., Nagao T., 2020. Designing
Convolutional Neural Network Architectures Using
Cartesian Genetic Programming. In Iba H., Noman N.
(eds) Deep Neural Evolution. Natural Computing
Series. Springer, Singapore. https://doi.org/10.1007/
978-981-15-3685-4_7
Nayak S., Panda M., 2020. Hardware Partitioning Using
Parallel Genetic Algorithm to Improve the Performance
of Multi-core CPU. In: Mohanty M., Das S. (eds)
Advances in Intelligent Computing and
Communication. Lecture Notes in Networks and
Systems, vol 109. Springer, Singapore.
https://doi.org/10.1007/978-981-15-2774-6_55
Zhang Y., Chen Y., Hu T., 2020. Classification of Autism
Genes Using Network Science and Linear Genetic
Programming. In: Hu T., Lourenço N., Medvet E.,
Divina F. (eds) Genetic Programming. EuroGP 2020.
Lecture Notes in Computer Science, vol 12101.
Springer, Cham. https://doi.org/10.1007/978-3-030-
44094-7_18
Górski, A., Ogorzałek, M.J., 2017. Adaptive iterative
improvement GP-based methodology for HW/SW co-
synthesis of embedded systems. In Proceedings of the
7th International Joint Conference on Pervasive and
Genetic Programming based Constructive Algorithm with Penalty Function for Hardware/Software Cosynthesis of Embedded Systems
587

Embedded Computing and Communication Systems,
Madrid, Spain.
Miller J.F., 2011 Cartesian Genetic Programming. In:
Miller J. (eds) Cartesian Genetic Programming. Natural
Computing Series. Springer, Berlin, Heidelberg.
https://doi.org/10.1007/978-3-642-17310-3_2
Riahi-Madvar, H., Dehghani, M., Seifi, A.; Singh, V.P.,
2019. Pareto Optimal Multigene Genetic Programming
for Prediction of Longitudinal Dispersion Coefficient.
In Water Resour. Manag., 33, 905–921.
Koza, J., R., Bennett III, F., H., Lohn, j., Dunlap, F., Keane,
M., A., Andre, D., 1997. Automated synthesis of
computational circuits using genetic programming. In
Proceedings of the IEEE Conference on Evolutionary
Computation. IEEE.
ICSOFT 2021 - 16th International Conference on Software Technologies
588
