
Visual Navigation Datasets for Event-based Vision: 2014-2021
Andrejs Zujevs and Agris Nikitenko
Faculty of Computer Science and Information Technology, Riga Technical University, Latvia
Keywords:
Datasets, Event-based Vision, Neuromorphic Vision, Visual Navigation, Concise Review.
Abstract:
Visual navigation is becoming the primary approach to the way unmanned vehicles such as mobile robots and
drones navigate in their operational environment. A novel type of visual sensor named dynamic visual sensor
or event-based camera has significant advantages over conventional digital colour or grey-scale cameras. It
is an asynchronous sensor with high temporal resolution and high dynamic range. Thus, it is particularly
promising for the visual navigation of mobile robots and drones. Due to the novelty of this sensor, publicly
available datasets are scarce. In this paper, a total of nine datasets aimed at event-based visual navigation
are reviewed and their most important properties and features are pointed out. Major aspects for choosing an
appropriate dataset for visual navigation tasks are also discussed.
1 INTRODUCTION
The essential functionality of mobile robots is their
ability to navigate in an operating environment. The
classic way to navigate a mobile robot in its environ-
ment is to count wheel turns and then estimate a mo-
tion path. It is called wheel odometry. An alterna-
tive to wheel odometry is inertial odometry, which
utilises an inertial measurement unit (IMU), which
can measure angular velocity, linear acceleration, and
the magnetic field.
Visual navigation, which started to be used in mo-
bile robots and drones quite recently, uses visual sen-
sors (digital cameras) as its main source of data and
is a more accurate approach. Visual navigation can be
divided into two areas of research (Scaramuzza and
Fraundorfer, 2011): visual odometry and visual si-
multaneous localization and mapping (visual SLAM).
The former provides only relative pose estimation -
that is, only the local position of a vehicle on a map
- whereas the latter deals with the global position
of a vehicle on a map. Visual SLAM uses loop-
closures (previously seen parts of operational envi-
ronments) that allow to fully re-estimate the actual
position of the vehicle by using all the previously
seen data. Therefore, visual SLAM is a computa-
tionally expensive approach and has important limi-
tations when operating on real-time systems and mo-
bile robots or micro-drones. On the other hand, vi-
sual odometry is more efficient and requires signifi-
cantly fewer computational resources. However, vi-
sual navigation systems equipped with conventional
digital cameras also have limitations such as motion
blur effect, data redundancy, relatively low dynamic
range, power-consuming and computationally expen-
sive devices.
Event-based vision is a new generation of com-
puter vision. It involves a dynamic visual sensor
(DVS), also called an event-based camera (EBC) or
’silicon retina’ (Brandli et al., 2014), as the primary
sensor. The DVS is a biologically inspired alterna-
tive to conventional digital cameras designed to over-
come their limitations. The DVS imitates the oper-
ating principle of the retina. Instead of transmitting
all the pixels of a frame (as in the case of conven-
tional digital cameras) from the image sensor, the
DVS asynchronously transmits only the pixels that
undergo some threshold brightness intensity changes.
DVS cameras are power-efficient, have a high dy-
namic range and high temporal resolution. Thus, the
DVS is a particularly promising sensor for use in
mobile robots and drones as the main component of
event-based visual navigation.
Developing methods of visual navigation requires
a source of repeatable data. Thus, datasets are the
most exploited resource for different kinds of bench-
marks, evaluation of algorithms, models training,
and performance measurement. Publicly available
datasets are useful when real sensors are not physi-
cally available or when research is mainly concerned
with methods rather than data preparation. A dataset
is a volume of specific data stored in a structured way
Zujevs, A. and Nikitenko, A.
Visual Navigation Datasets for Event-based Vision: 2014-2021.
DOI: 10.5220/0010607105070513
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 507-513
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
507
and documented for other users. Datasets are useful
when either real sensors are not available or when it is
necessary to use data prepared in a specific way. This
paper focuses on the datasets aimed at visual naviga-
tion tasks (e.g. structure from motion and particularly
for Visual Odometry (VO), reconstruction, segmenta-
tion, and visual SLAM) using a DVS camera. The
rest of the paper is organized as follows. Section 2
provides a brief description of the event-based vision.
Section 3 offers a concise survey of publicly available
event-based visual navigation datasets. Finally, Sec-
tion 4 discusses the reviewed datasets and provides
general conclusions.
2 EVENT-BASED VISION
Event-based vision is a new technology of visual data
generation by a visual sensor, as well as of the way
this new type of visual data is processed. Instead of
generating a sequence of image frames, a DVS sensor
produces a stream of events. Each event represents a
particular pixel’s intensity level change above a cer-
tain threshold value. An event is a tuple of x,y coordi-
nates of the pixel, with a timestamp measured in mi-
croseconds and polarity, which represents the direc-
tion of the intensity level change. The DVS produces
data only for scenes - views of operational environ-
ments from the sensor’s perspective - with movement
caused either by the sensor’s ego-motion or move-
ments in the scenes themselves, for example, see Fig-
ure 1.
Address-Event Representation (AER) (Conradt
et al., 2009) is a standard for communication, pro-
cessing, and storage of event data, which was first
introduced in (Mahowald, 1992). Subsequently, the
jAER project was introduced by the event-based vi-
sion community in 2006. It provides API for work
with various versions of DVS, as well as many dif-
ferent methods for event data processing
1
. Within
the jAER project, many groups of researchers pro-
vide their own methods of implementation (Mueg-
gler, 2017), (Brandli et al., 2016), (Katz et al., 2012),
(Rueckauer and Delbruck, 2016), (Liu and Delbruck,
2018), (Benosman et al., 2014). Another resource re-
lated to jAER is the C library
2
named cAER, which is
an optimized jAER project for embedded computers
and is distributed as a standalone library. Since 2019,
Inivation AG has been developing a new software de-
velopment library
3
for DVSs, with interfaces for C++,
Python and ROS.
1
https://github.com/SensorsINI/jaer/
2
https://github.com/inivation/libcaer
3
https://inivation.com/dvp/
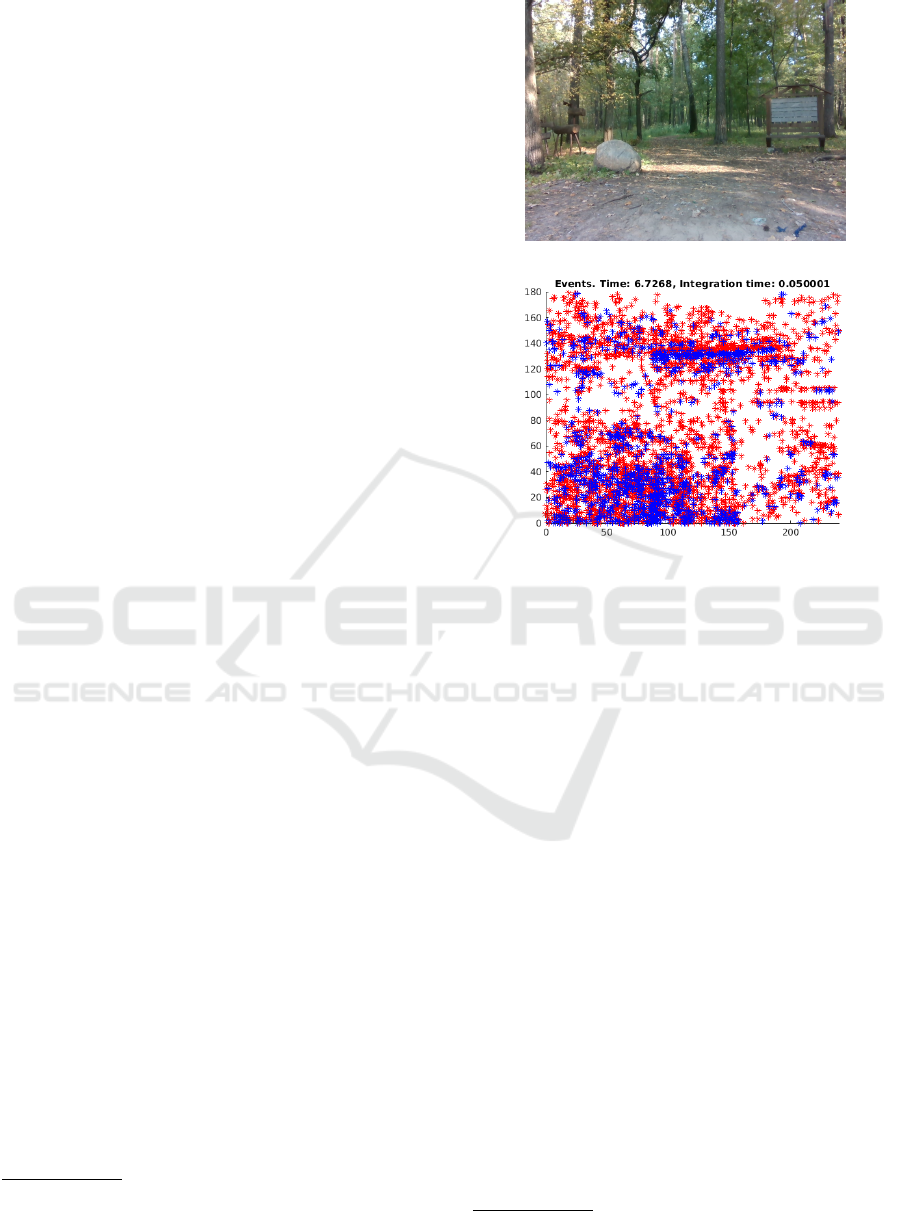
(a)
(b)
Figure 1: Example form the dataset (Zujevs et al., 2021):
(a) colour frame acquired by an RGB-D camera, (b) events
represented according to the colour frame scene and pro-
duced by the camera’s ego-motion, and then accumulated
over a short period of time; red markers are positive events
(pixels whose intensity increases) and blue markers are neg-
ative events (pixels whose intensity decreases). The events
are timestamped with microsecond resolution.
The field of event-based vision is growing fast. In
(Gallego et al., 2020), a survey of event-based vision
is presented.
3 RECENT DATASETS
The dataset
4
presented in (Barranco et al., 2016) con-
tains data sequences from a DAVIS240 (events and
APS frames) and a Microsoft Kinect Sensor (RGB-D
sensor). The sensors are mounted on a Pan-Tilt Unit
(PTU-46-17P70T) on board a Pioneer 3DX Mobile
Robot. The PTU provides the pan and tilt angles and
angular velocities while the mobile robot provides the
direction of translation and speed. The dataset con-
tains real and synthetic data in a total of 40 static se-
quences for the indoor environment - an office with
or without people. The data sequences contain ob-
4
https://github.com/fbarranco/eventVision-evbench
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
508

jects of different sizes, textures and shapes, and the
sensors are rotated or translated to some degree. The
events are provided both in AERdat2.0 data format
and in matlab files while depth is provided in pgm
and matlab files. Also, the author includes the syn-
thetic data generated from conventional CV datasets.
The ground truth is provided by 3-D motion parame-
ters in textual data format for the 3-D translation and
3-D pose of the camera (respecting the DAVIS coor-
dinates). In addition, the dataset provides the ground
truth as 2-D image motion fields generated from the
depth and the 3D motion. Calibration of the DAVIS
and the RGB-D sensor is also provided in the dataset.
The dataset
5
published in (Weikersdorfer et al.,
2014) contains 26 data sequences (each 20-60 sec-
onds long) from an eDVS and a PrimeSense sensor (a
colour camera equipped with a depth sensor). Ground
truth data are provided in the bvh data format from an
OptiTrack V100 motion capture system. Data from
other sensors are provided in the text data format.
Events are provided in both the eDVS’s pixel coordi-
nates and in the PriveSensor’s pixel coordinates with
depth values. The data sequences are mostly pro-
vided in 640x480 resolution at 30Hz. Each data se-
quence is accompanied by the estimated path of the
proposed SLAM method. The dataset contains data
of hand-held 6-DOF motion in static and dynamic
office scenes with and without people. Along with
the dataset, the authors propose a novel event-based
3D V-SLAM (EB-SLAM-3D) and eDVS calibration
method, which uses a checkerboard calibration target
and a blinking LED in the centre to estimate the pixel-
to-pixel correspondence between the eDVS and the
RGB-D sensors.
In (Mueggler et al., 2017b) proposed dataset is
aimed at comparing event-based SLAM methods.
The dataset
6
containing a total of 27 data sequences
from DAVIS240 and synthetic data sequences (each
2-133 seconds long) is presented. The sequences pro-
vide hand-held and slider motions. The dataset in-
cludes the following objects and scences: patterns,
wall poster, boxes, outdoors, dynamic, calibration, of-
fice, urban scenes, scenes with objects captured by a
motorized linear slider, 3 synthetic planes, and 3 syn-
thetic walls. The ground truth data are provided by a
motion capture system and by the DAVIS’s IMU, and,
for some data sequences, by the slider’s position. For
the data captured in outdoor environments, no ground
truth data are provided. Events and IMU data are pro-
vided in text files while images are available in png
files. The data sequences are also available in rosbag
5
http://ebvds.neurocomputing.systems/EBSLAM3D/
index.html
6
http://rpg.ifi.uzh.ch/davis data.html
data containers. The authors provide the first version
of a DVS simulator based on the BLENDER tool.
Paper (Binas et al., 2017) offers a dataset
7
in-
tended to investigate event camera applications in au-
tomatic driver assistance systems (ADAS). A new up-
date of the dataset is presented in (Hu et al., 2020).
It was used for training a neural network to predict
the instantaneous steering angle using data from a
DAVIS346. For all the recordings, the camera was
mounted in a fixed position behind a windshield. A
polarisation filter was used in some recordings to re-
duce the windshield and hood glare. The dataset con-
sists of a total of over 12 hours of a car driving un-
der various weather, driving, road, and lighting con-
ditions for seven consecutive days with a total mileage
of 1000km, comprising different types of roads. The
data were stored in the HDF5 data format. A lot of
car parameters were read at 10Hz rate (e.g. steering
wheel angle, accelerator pedal position, engine speed
etc.). The typical duration of the data sequences is 1-
60 min. The data in the dataset tend to be unbalanced.
The authors also provide Python-based tools
8
for data
visualization and export.
In (Zhu et al., 2018), the authors present the
first work
9
where a synchronized stereo pair of
DAVIS346B was installed on a sensor rig and then
mounted on a hexacopter, on the roof of a car and a
motorcycle. Data were gathered in different environ-
ments and at different illumination levels. From each
DAVIS camera, the following streams of data were
recorded: grey-scale images, events and IMU data.
Additionally, a stereo camera (VI sensor from Sky-
botix) and a LIDAR (Velodyne VLP-16 PUCK LITE)
were used, and data were recorded from the LIDAR,
an indoor and outdoor motion capture system, and a
GPS sensor. A total of 14 data sequences are avail-
able. Ground truth is provided by the motion capture
system for indoor and outdoor scenes. For other data
sequences where the motion capture system was not
available, LIDAR odometry was used. GPS data ac-
company the ground truth data. The data sequences
are provided in rosbag and hdf5 data containers.
In (Scheerlinck et al., 2019), the first color-
event dataset
10
recorded by the color version of
DAVIS346 is provided. This is a general-purpose
dataset without ground truth. Also, the updated ver-
sion of ESIM (Event-based Camera Simulator) (Re-
becq et al., 2018) for color events generation is pre-
sented. The dataset contains the following types of
scenes: simple objects, indoor/outdoor, people, and
7
http://sensors.ini.uzh.ch/databases.html
8
https://code.ini.uzh.ch/jbinas/ddd17-utils
9
https://daniilidis-group.github.io/mvsec/
10
http://rpg.ifi.uzh.ch/CED.html
Visual Navigation Datasets for Event-based Vision: 2014-2021
509

various lighting conditions (daylight, indoor light,
low light), as well as camera motions (linear, 6-DOF
motion) and dynamic motions.
Paper (Bryner et al., 2019) presented a method
that tracks the 6-DOF pose of an event-based cam-
era in an initially known environment described by
a photometric 3D map (intensity + Depth) created us-
ing the classical approach of dense 3D reconstruction.
The method uses direct event data without employing
features, and it was successfully evaluated on real and
synthetic data. The dataset
11
was released for public
use. It includes the acquired images and the ground
truth of the camera’s trajectory. In this paper, the au-
thors are more focused on the localization on a given
map. Ground truth data for real data were provided by
a motion capture system. A total of 23 data sequences
are provided within rosbag data containers.
The first dataset (Zujevs et al., 2021) aimed at vi-
sual navigation tasks in different types of agricultural
environment for the autumn season is publicly avail-
able
12
. It provides a total of 21 data sequences in
12 scenarios. The data sequences were gathered by a
sensor bundle with the following elements onboard: a
DVS240, a Lidar (OS-1, 16 channel), an RGB-D (In-
tel RealSense i435) and environmental sensors. The
dataset is accompanied by sensors calibration results
and raw data used during the sensors calibration pro-
cedure. For each sequence, a video demonstrating its
content is provided. Ground truth is provided by three
LIDAR SLAM methods, where a Cartographer (Hess
et al., 2016) estimated the loop closure more accu-
rately than the other two methods.
The first dataset (Gehrig et al., 2021) aimed at
driving scenarios in challenging illumination condi-
tions, where data are recorded from two monochrome
high-resolution event-based cameras
13
, two RGB
cameras (FLIR Blackfly S USB3), a LIDAR (Velo-
dyne VLP-16), and GPS (GNSS receiver), is avail-
able in
14
. In total, it provides 53 sequences 12-2255
seconds long. All the involved sensors were intrinsi-
cally and extrinsically calibrated. Ground truth data
are provided by GPS and estimated depth from fus-
ing the LIDAR data with event and frame-based cam-
era data. The data are provided in the text, png and
hdf5 data formats. All the aforementioned datasets
are summarized in Table 1.
11
http://rpg.ifi.uzh.ch/direct event camera tracking/
12
https://ieee-dataport.org/open-access/agri-ebv-autumn
13
Prophesee PPS3MVCD, 640x480 pixels.
14
http://rpg.ifi.uzh.ch/dsec.html
4 DISCUSSIONS
In this section, the aspects of the dataset usage are
discussed. Obviously, the most important factor in
choosing an appropriate dataset is the visual task(s)
that has(ve) to be performed. Some of the common
visual navigation tasks are 2-D/3-D motion estima-
tion (Gallego et al., 2016), scene reconstruction(Kim
et al., 2016), visual SLAM(Vidal et al., 2018) and
image motion estimation (also called optical flow)
(Benosman et al., 2014). All the reviewed datasets
are appropriate for 2-D/3-D motion estimation, at
least when using only the data from a DVS sensor.
Other sensors can improve estimation results if a mo-
tion estimation method or a framework uses sensor
fusion. For the motion estimation task, good re-
sults are obtained by fusing DVS data with IMU and
colour or grey-scale image, as proposed in (Weikers-
dorfer et al., 2014), and (Zhu et al., 2017). How-
ever, an additional requirement arises - the need for
the ground truth motion path. All the datasets, except
for (Scheerlinck et al., 2019), provide ground truth
data (either via a motion capture system or estimated
using data from the other used sensors, for example,
LIDAR data).
The image motion estimation task requires depth
data, such data are available in (Barranco et al.,
2016), (Weikersdorfer et al., 2014), (Zhu et al., 2018),
(Gehrig et al., 2021), and (Zujevs et al., 2021) dataset.
Scene reconstruction allows to reconstruct a scene
- by using an event stream - as grey-scale images, all
the datasets are appropriate for this task.
The visual SLAM task allows estimating the
global position of a mobile robot or a drone on a
map. Visual SLAM requires loop closures in data se-
quences, and the following datasets contain loop clo-
sures: (Mueggler et al., 2017b), (Weikersdorfer et al.,
2014), (Zhu et al., 2018) and (Zujevs et al., 2021).
Ground truth is also an additional requirement for
SLAM method evaluation and comparison purposes.
The data format used in data sequences of a
dataset is the second important aspect that should be
taken into account. There are three common data for-
mats used in datasets: textual (data are stored in text
files), native binary (data are stored in native binary
files associated with the appropriate sensor), rosbag
(data containers used by ROS
15
). Usually, datasets
use mixed data types of data sequences. For example,
in the dataset (Barranco et al., 2016), textual, binary
and Matlab files are used to store data, and, in (Mueg-
gler et al., 2017b), textual, binary and rosbag files are
used.
15
Robot Operating System
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
510

Table 1: Summary of visual navigation datasets: 2014-2021.
Year 2014 2016 2016 2017 2018 2019 2019 2021 2021
Paper (Weikersdorfer et al., 2014) (Barranco et al., 2016) (Mueggler et al., 2017b) (Binas et al., 2017) (Zhu et al., 2018) (Scheerlinck et al., 2019) (Bryner et al., 2019) (Zujevs et al., 2021) (Gehrig et al., 2021)
Visual task
3-D motion estim. • • • • • • • • •
Visual-SLAM • • • • •
Sensors used
DAVIS • • • • • •
DVS • • •
RGB-D • • • • •
LIDAR • • •
Other • • • • •
Sensors mounting point
Hand-held • • • • •
Car • •
Mobile platform • • •
Drone •
Other •
Environment: outdoor
City and country • • • • •
Tunnels • • •
Highways • • • •
Agricultural env. •
Environment: indoor
Office with/without
people • • • • • •
Simple objects • • • •
Posters and HDR •
Agricultural env. •
Ground truth is provided by
Motion Capt.Syst. • • •
IMU • • • •
Other odometry RGB-D
Slider
pos. GPS
GPS
LIDAR
3-D
map LIDAR
GPS
LIDAR
Depth
Data and data format used
Number of seq. 26 40 27 - 14 84 23 21 53
Sequence length
20-
60sec
2-
133 sec 12hours
25ms-
28min
10-
45 sec
111-
337sec
12-
2255sec
Data format
text
bvh
AER
matlab
pgm
text
png
rosbag hdf5
rosbag
hdf5 rosgab rosbag
rosbag
text
AER
png
pcd
hdf5
text
png
Dataset location
URL link Link Link Link Link Link Link Link Link Link
Another two aspects that should be considered are
the availability of ground truth and the sensor coor-
dinate systems used. Ground truth allows to com-
pare methods in a quantitative way by applying dif-
ferent kinds of metrics. Each visual navigation task
has its own type of ground truth. Another aspect is
sensor coordinate system used as primary within data
sequences. There are two common approaches: (1)
the calibration parameters are provided to make your
own transformation between sensors coordinate sys-
tems (body frames), and (2) all the data are already
transformed into the main coordinate system of one
of the visual sensors.
In addition, another important factors that influ-
ence the choice of a particular dataset are the environ-
ment and the motion type of the camera. As shown in
Table 1, datasets are dedicated to indoor and outdoor
environments. The differences between these envi-
ronments include illumination conditions, the type of
a scene - static or dynamic (where objects in a scene
are moving)- types of objects and their shape and pat-
tern, camera mounting place (on a car, on a mobile
robot, on a hexacopter, and hand-held mounted). De-
pending on the visual navigation task and the require-
ments for the used methods, an appropriate dataset
should be used. In many situations, the availability
of ground truth is also a major requirement, which
allows to do a quantitative analysis, however, the ac-
curacy of the ground truth might be different. If a
motion capture system is used to generate the ground
truth, then the accuracy is high. Unfortunately, a mo-
tion capture system is not always available, especially
for outdoor scenes. Hence, the ground truth is esti-
mated from the data of the sensor used, for example,
LIDAR data.
Finally, there are no event-based datasets aimed
at event-based feature detection and tracking for vi-
sual navigation tasks. That is essential aspect for the
2-D/3-D motion estimation by using feature detect-
ing tracking methods, for example, Arc*(Alzugaray
and Chli, 2018), eHarris(Vasco et al., 2016), and
eFast(Mueggler et al., 2017a).
5 CONCLUSIONS
Datasets aimed at event-based visual navigation are
currently scarce because of the novel type of the dy-
namic vision sensor used. Event-based methods for
all the mentioned visual navigation tasks are also
scarce. Another difficulty is the rare availability of
event-based methods implementations in open source
resources. This fact complicates the evaluation and
application of the proposed methods in real robotic
systems.
The reviewed datasets are an important contribu-
tion to the development of event-based visual naviga-
tion methods. These datasets provide data sequences
for different types of environment from DVSs, depth
sensors, RGB-D, LIDAR, and their IMUs. In total,
Visual Navigation Datasets for Event-based Vision: 2014-2021
511

nine datasets were summarized, in different groups of
features. Each dataset is accompanied by a data lo-
cation link. All the mentioned datasets have ground
truth data, except for one dataset, which provides data
from a new colour version of the DVS camera. An-
other, currently unique, dataset is aimed at agricul-
tural environments, where data are recorded in such
settings as a forest, a meadow, a cattle farm, etc.
Choosing an appropriate dataset is an essential
task for successful evaluation and development of
new methods as well as for their quantitative and qual-
itative analysis. The type of environment and the
type of camera motion used (fast, slow, rotational,
and translational) within n-DOF are two major fac-
tors. While there is a sparse availability of event-
based visual navigation datasets, there are no datasets
that provide data for event-based feature detection and
tracking. This direction of event-based visual naviga-
tion is based on the classical approach to how motion
is estimated from frame-based data. Based on all of
the above, the design of new datasets is highly neces-
sary since it will lead to the development and better
availability of new methods.
ACKNOWLEDGEMENTS
A.Zujevs is supported by the European Regional
Development Fund within the Activity 1.1.1.2
“Post-doctoral Research Aid” of the Specific Aid
Objective 1.1.1 (No.1.1.1.2/VIAA/2/18/334), while
A.Nikitenko is supported by the Latvian Council of
Science (lzp-2018/1-0482).
REFERENCES
Alzugaray, I. and Chli, M. (2018). Asynchronous Cor-
ner Detection and Tracking for Event Cameras in
Real Time. IEEE Robotics and Automation Letters,
3(4):3177–3184.
Barranco, F., Fermuller, C., Aloimonos, Y., and Delbruck,
T. (2016). A Dataset for Visual Navigation with
Neuromorphic Methods. Frontiers in Neuroscience,
10(FEB):1–9.
Benosman, R., Clercq, C., Lagorce, X., Sio-Hoi Ieng, and
Bartolozzi, C. (2014). Event-Based Visual Flow.
IEEE Transactions on Neural Networks and Learning
Systems, 25(2):407–417.
Binas, J., Neil, D., Liu, S.-C., and Delbruck, T. (2017).
DDD17: End-To-End DAVIS Driving Dataset. pages
1–9.
Brandli, C., Berner, R., Minhao Yang, Shih-Chii Liu, and
Delbruck, T. (2014). A 240x180 130 dB 3 us Latency
Global Shutter Spatiotemporal Vision Sensor. IEEE
Journal of Solid-State Circuits, 49(10):2333–2341.
Brandli, C., Strubel, J., Keller, S., Scaramuzza, D., and
Delbruck, T. (2016). ELiSeD — An event-based line
segment detector. In 2016 Second International Con-
ference on Event-based Control, Communication, and
Signal Processing (EBCCSP), pages 1–7. IEEE.
Bryner, S., Gallego, G., Rebecq, H., and Scaramuzza, D.
(2019). Event-based, Direct Camera Tracking from
a Photometric 3D Map using Nonlinear Optimization.
In 2019 International Conference on Robotics and Au-
tomation (ICRA), volume 2019-May, pages 325–331.
IEEE.
Conradt, J., Berner, R., Cook, M., and Delbruck, T. (2009).
An embedded AER dynamic vision sensor for low-
latency pole balancing. In 2009 IEEE 12th Inter-
national Conference on Computer Vision Workshops,
ICCV Workshops, pages 780–785. IEEE.
Gallego, G., Delbruck, T., Orchard, G. M., Bartolozzi,
C., Taba, B., Censi, A., Leutenegger, S., Davison,
A., Conradt, J., Daniilidis, K., and Scaramuzza, D.
(2020). Event-based Vision: A Survey. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
pages 1–1.
Gallego, G., Lund, J. E. A., Mueggler, E., Rebecq, H.,
Delbr
¨
uck, T., and Scaramuzza, D. (2016). Event-
based, 6-dof camera tracking for high-speed applica-
tions. ArXiv, abs/1607.03468.
Gehrig, M., Aarents, W., Gehrig, D., and Scaramuzza, D.
(2021). Dsec: A stereo event camera dataset for driv-
ing scenarios. IEEE Robotics and Automation Letters,
6(3):4947–4954.
Hess, W., Kohler, D., Rapp, H., and Andor, D. (2016). Real-
time loop closure in 2D LIDAR SLAM. In 2016 IEEE
International Conference on Robotics and Automation
(ICRA), volume 2016-June, pages 1271–1278. IEEE.
Hu, Y., Binas, J., Neil, D., Liu, S.-C., and Delbruck, T.
(2020). DDD20 End-to-End Event Camera Driving
Dataset: Fusing Frames and Events with Deep Learn-
ing for Improved Steering Prediction. arXiv.
Katz, M. L., Nikolic, K., and Delbruck, T. (2012). Live
demonstration: Behavioural emulation of event-based
vision sensors. In 2012 IEEE International Sympo-
sium on Circuits and Systems, pages 736–740. IEEE.
Kim, H., Leutenegger, S., and Davison, A. J. (2016). Real-
Time 3D Reconstruction and 6-DoF Tracking with an
Event Camera. In Proceedings of the European Con-
ference on Computer Vision (ECCV), pages 349–364.
Springer, Cham, eccv 2016. edition.
Liu, M. and Delbruck, T. (2018). Adaptive Time-Slice
Block-Matching Optical Flow Algorithm for Dynamic
Vision Sensors. In British Machine Vision Conference
2018.
Mahowald, M. (1992). VLSI Analogs of Neuronal Visual
Processing: A Synthesis of Form and Function. PhD
thesis, California Institute of Technology Pasadena,
California.
Mueggler, E. (2017). Event-based Vision for High-Speed
Robotics. PhD thesis, University of Zurich.
Mueggler, E., Bartolozzi, C., and Scaramuzza, D. (2017a).
Fast Event-based Corner Detection. In Procedings
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
512

of the British Machine Vision Conference 2017, vol-
ume 1, pages 1–11. British Machine Vision Associa-
tion.
Mueggler, E., Rebecq, H., Gallego, G., Delbruck, T., and
Scaramuzza, D. (2017b). The event-camera dataset
and simulator: Event-based data for pose estimation,
visual odometry, and SLAM. The International Jour-
nal of Robotics Research, 36(2):142–149.
Rebecq, H., Gehrig, D., and Scaramuzza, D. (2018). ESIM:
an Open Event Camera Simulator. In Billard, A., Dra-
gan, A., Peters, J., and Morimoto, J., editors, Proceed-
ings of The 2nd Conference on Robot Learning, pages
969–982. PMLR.
Rueckauer, B. and Delbruck, T. (2016). Evaluation
of Event-Based Algorithms for Optical Flow with
Ground-Truth from Inertial Measurement Sensor.
Frontiers in Neuroscience, 10(APR).
Scaramuzza, D. and Fraundorfer, F. (2011). Tutorial: Visual
odometry. IEEE Robotics and Automation Magazine,
18(4):80–92.
Scheerlinck, C., Rebecq, H., Stoffregen, T., Barnes, N., Ma-
hony, R., and Scaramuzza, D. (2019). CED: Color
Event Camera Dataset. In 2019 IEEE/CVF Con-
ference on Computer Vision and Pattern Recogni-
tion Workshops (CVPRW), volume 2019-June, pages
1684–1693. IEEE.
Vasco, V., Glover, A., and Bartolozzi, C. (2016). Fast
event-based Harris corner detection exploiting the ad-
vantages of event-driven cameras. IEEE International
Conference on Intelligent Robots and Systems, 2016-
Novem:4144–4149.
Vidal, A. R., Rebecq, H., Horstschaefer, T., and Scara-
muzza, D. (2018). Ultimate SLAM? Combining
Events, Images, and IMU for Robust Visual SLAM
in HDR and High-Speed Scenarios. IEEE Robotics
and Automation Letters, 3(2):994–1001.
Weikersdorfer, D., Adrian, D. B., Cremers, D., and Con-
radt, J. (2014). Event-based 3D SLAM with a depth-
augmented dynamic vision sensor. In 2014 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 359–364. IEEE.
Zhu, A. Z., Atanasov, N., and Daniilidis, K. (2017). Event-
based visual inertial odometry. Proceedings - 30th
IEEE Conference on Computer Vision and Pattern
Recognition, CVPR 2017, 2017-Janua:5816–5824.
Zhu, A. Z., Thakur, D., Ozaslan, T., Pfrommer, B., Kumar,
V., and Daniilidis, K. (2018). The Multivehicle Stereo
Event Camera Dataset: An Event Camera Dataset for
3D Perception. IEEE Robotics and Automation Let-
ters, 3(3):2032–2039.
Zujevs, A., Pudzs, M., Osadcuks, V., Ardavs, A., Galauskis,
M., and Grundspenkis, J. (2021). Agri-EBV-Autumn.
Visual Navigation Datasets for Event-based Vision: 2014-2021
513
