Domain Adaptation in LiDAR Semantic Segmentation by Aligning Class
Distributions
I
˜
nigo Alonso
1
, Luis Riazuelo
1
, Luis Montesano
1,2
and Ana C. Murillo
1
1
RoPeRt Group, DIIS - I3A, Universidad de Zaragoza, Spain
2
Bitbrain, Zaragoza, Spain
Keywords:
Robotics, Autonomous Systems, LiDAR, Deep Learning, Semantic Segmentation, Domain Adaptation.
Abstract:
LiDAR semantic segmentation provides 3D semantic information about the environment, an essential cue for
intelligent systems, such as autonomous vehicles, during their decision making processes. Unfortunately, the
annotation process for this task is very expensive. To overcome this, it is key to find models that generalize well
or adapt to additional domains where labeled data is limited. This work addresses the problem of unsupervised
domain adaptation for LiDAR semantic segmentation models. We propose simple but effective strategies to
reduce the domain shift by aligning the data distribution on the input space. Besides, we present a learning-
based module to align the distribution of the semantic classes of the target domain to the source domain. Our
approach achieves new state-of-the-art results on three different public datasets, which showcase adaptation to
three different domains.
1 INTRODUCTION
3D semantic segmentation is an important computer
vision task that provides useful information to each
registered 3D point of the surrounding environment.
It has a wide range of applications and is particularly
important in robotics, since most autonomous sys-
tems require an accurate and robust perception of their
environment. LiDAR (Light Detection And Ranging)
is a frequently used sensor for 3D perception in au-
tonomous vehicles, such as cars or delivery robots,
that provides accurate distance measurements of the
surrounding 3D space. Despite LiDAR broad adop-
tion, recognition systems such as semantic segmen-
tation methods that generalize and perform well for
different LiDAR sensors, vehicle set-ups or environ-
ments remains an unsolved challenging problem. Ex-
isting solutions typically need significant amounts of
labeled data to adapt to different domains (Mei et al.,
2019).
In recent years, deep learning methods are achiev-
ing state-of-the-art performance in 3D LiDAR seman-
tic segmentation (Milioto et al., 2019; Alonso et al.,
2020) when trained and evaluated in the same domain.
Nevertheless, generalizing the learned knowledge to
new domains or environments not seen during train-
ing is still a frequent open problem. When applying
existing models on data with a different distribution
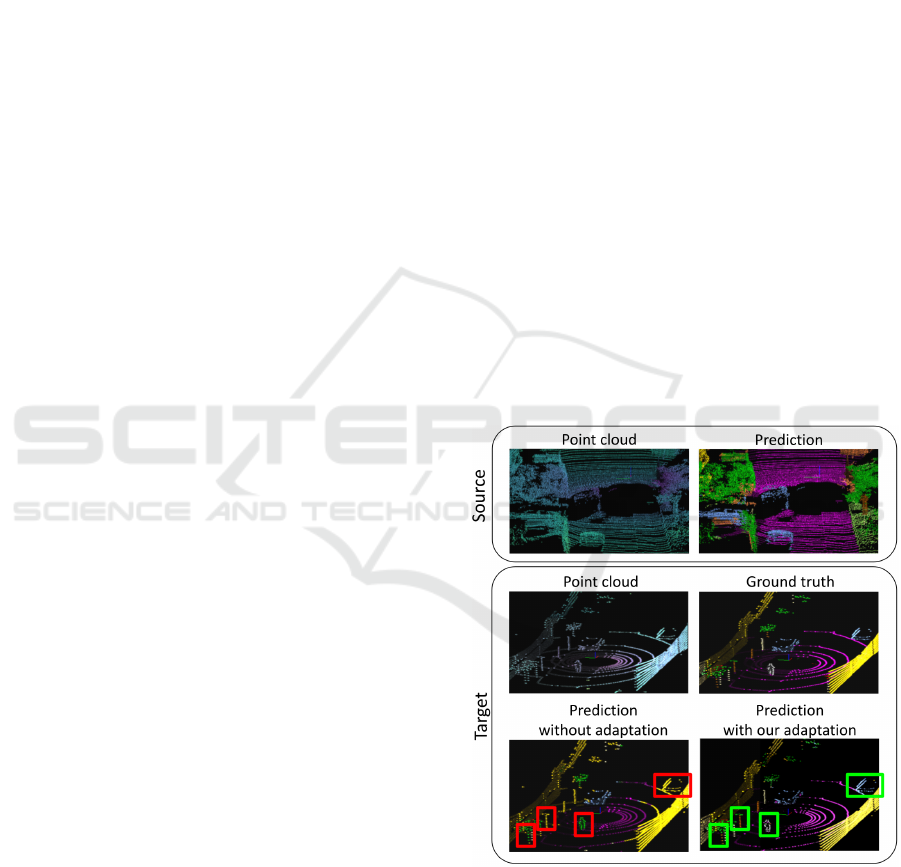
Figure 1: Domain Adaptation in LiDAR Semantic Segmen-
tation. Top row: segmentation result of a given model train
on the same source domain (Behley et al., 2019). Bottom
row: segmentation of the same model on a target domain
without adaptation and the improved result applying our
proposed adaptation. Note relevant details missed if we do
not adapt the model (marked with a red/green square).
330
Alonso, I., Riazuelo, L., Montesano, L. and Murillo, A.
Domain Adaptation in LiDAR Semantic Segmentation by Aligning Class Distributions.
DOI: 10.5220/0010610703300337
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 330-337
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

than the training data, i.e., from a different domain,
the performance is considerably degraded (Wang and
Deng, 2018; Tzeng et al., 2017; Vu et al., 2019).
Domain adaptation techniques aim to eliminate or
reduce this drop. Existing works for domain adapta-
tion in semantic segmentation focus on RGB data (Vu
et al., 2019; Zou et al., 2019; Chen et al., 2019; Li
et al., 2019). Most of them try to minimize the dis-
tribution shift between two different domains. Very
few approaches have tackled this problem with Li-
DAR data (Wu et al., 2019), which equally suffers
from the domain shift. RGB data commonly suffers
from variations due to light and weather conditions,
while the most common variations within 3D point
clouds data come from sensor resolution (i.e., sensors
with more laser sweeps generate denser point clouds)
and from the sensor placement (because point clouds
have relative coordinates with respect to the sensor).
Both sensor resolution and placement issues are com-
mon examples that change the data distribution of the
captured 3D point clouds. Coping with these issues
would enable the use of large existing labeled LiDAR
datasets for more realistic use-cases in robotic appli-
cations, reducing the need for data labeling.
This work proposes two strategies to improve un-
supervised domain adaptation (UDA) in LiDAR se-
mantic segmentation, see a sample result on Fig. 1.
The first strategy addresses this problem by apply-
ing a set of simple data processing steps to align the
data distribution reducing the domain gap on the in-
put space. The second strategy proposes how to align
the distribution on the output space by aligning the
class distribution. These two proposed strategies can
be applied in conjunction with current state-of-the-art
approaches boosting their performance.
We validate our approach on different scenar-
ios getting state-of-the-art results. We use the Se-
manticKitti (Behley et al., 2019) as the source domain
and we adapt it to SemanticPoss (Pan et al., 2020), to
Paris-Lille-3D (Roynard et al., 2018) and to a new
collected and released dataset.
2 RELATED WORK
This section describes the related work for the most
relevant related topics for this work: 3D LiDAR seg-
mentation and, unsupervised domain adaptation for
semantic segmentation.
2.1 3D LiDAR Point Cloud
Segmentation
3D LiDAR Semantic segmentation aims to assign a
semantic label to every point scanned by the LiDAR
sensor. Before the current trend and wide adoption of
deep learning approaches, earlier methods relied on
exploiting prior knowledge and geometric constraints
(Xie et al., 2019). As far as deep learning meth-
ods are concerned, there are two main types of ap-
proaches to tackle the 3D LiDAR semantic segmen-
tation problem. On one hand, there are approaches
that work directly on the 3D points, i.e., the raw point
cloud is taken as the input (Qi et al., 2017a; Qi et al.,
2017b). On the other hand, other approaches con-
vert this 3D point cloud into another representation
(images(Alonso et al., 2020), voxels(Zhou and Tuzel,
2018), lattices(Rosu et al., 2019)) in order to have a
structured input. For LiDAR semantic segmentation,
the most commonly used representation is the spher-
ical projection (Alonso et al., 2020; Milioto et al.,
2019; Wu et al., 2018). Several recent works (Mil-
ioto et al., 2019; Wu et al., 2018; Alonso et al., 2020)
show that point-based methods, i.e., approaches that
work directly on the 3D points, are slower and tend
to be less accurate than methods which project the 3D
point cloud into a 2D representation and make use of
convolutional layers.
2.2 Unsupervised Domain Adaptation
for Semantic Segmentation
Unsupervised Domain Adaptation (UDA) aims to
adapt models that have been trained on one specific
domain (source domain) to be able to work on a dif-
ferent domain (target domain) where there is a cer-
tain lack of labeled training data. Most works fol-
low similar ideas: the input data or features from
a source-domain sample and a target-domain sample
should be indistinguishable. Several works follow an
adversarial training scheme to minimize the distribu-
tion shift between the target and source domains data.
This approach has been shown to work properly at
pixel space (Yang and Soatto, 2020), at feature space
(Hoffman et al., 2018) and at output space (Vu et al.,
2019). However, adversarial training schemes, such
as DANN (Ganin et al., 2016), tend to present con-
vergence problems. Alternatively, other works follow
different schemes like CORL (Sun et al., 2017) or Mi-
nEnt (Vu et al., 2019). Entropy minimization meth-
ods (Vu et al., 2019; Chen et al., 2019) do not require
complex training schemes. They rely on a loss func-
tion that minimizes the entropy of the unlabeled target
domain output probabilities.
Domain Adaptation in LiDAR Semantic Segmentation by Aligning Class Distributions
331

Regarding segmentation on LiDAR data, very few
works have studied the problem of domain adaptation.
SqueezeSegV2 (Wu et al., 2019) proposes how to
adapt synthetic data where only coordinates are avail-
able without reflectance to real data. For this, they
propose a learned intensity rendering to create the in-
tensity for the synthetic data. A very recent work,
Xmuda (Jaritz et al., 2020) focuses on combining dif-
ferent modalities: LiDAR and RGB for multi-modal
domain adaptation. They propose to apply the KL
divergence between the output probabilities of both
modalities as the main loss function. Besides, they
also apply previously proposed methods like entropy
minimization (Vu et al., 2019). Differently, this work
investigates different UDA strategies (both existing
and novel) to improve UDA for the particular case of
urban LiDAR semantic segmentation. The presented
results show their effectiveness in reducing the do-
main gap.
3 UNSUPERVISED DOMAIN
ADAPTATION FOR LiDAR
SEMANTIC SEGMENTATION
This section describes the proposed domain adapta-
tion approach, including the LiDAR semantic seg-
mentation method used, the strategies proposed to re-
duce the domain gap (data alignment and class dis-
tribution alignment), and the formulation of the pro-
posed learning task. Figure 2 presents an overview of
our proposed approach which is further explained in
the following subsections.
3.1 LiDAR Semantic Segmentation
Model
We use a recent method for LiDAR semantic segmen-
tation which achieves state-of-the-art performance on
several LiDAR segmentation datasets, 3D-MiniNet
(Alonso et al., 2020). This method consists of three
main steps. First, it learns a 2D representation from
the 3D points. Then, this representation is fed to a 2D
Fully Convolutional Neural Network that produces a
2D semantic segmentation. These 2D semantic labels
are re-projected back to the 3D space and enhanced
through a post-processing module.
Let X
s
⊂ R
N×3
be a set of source domain LiDAR
point clouds along with associated semantic labels,
Y
s
⊂ (1, C)
N
. Sample x
x
x
s
is a point cloud of size N
and y
y
y
(n,c)
s
provides the label of point (n) as one-hot
encoded vector. Let F be our LiDAR segmentation
network which takes a point cloud x
x
x and predicts a
probability distribution (size C classes) for each point
of the point-cloud F(x
x
x) = P
P
P
(n,c)
x
x
x
.
The parameters θ
F
of F are optimized to minimize
cross-entropy loss:
L
seg
(x
x
x
s
, y
y
y
s
) = −
N
∑
n=1
C
∑
c=1
y
y
y
(n,c)
s
logP
P
P
(n,c)
x
x
x
s
, (1)
on source domain samples. Therefore, as the super-
vised semantic segmentation is concerned, the opti-
mization problem simply reads:
min
θ
F
1
|X
s
|
∑
x
x
x
s
∈X
s
L
seg
(x
x
x
s
, y
y
y
s
). (2)
3.2 Data Alignment Strategies for
LiDAR
The problem of domain adaptation, i.e., data distribu-
tion misalignment, between X
s
and X
t
(a set of target
domain LiDAR point clouds), can be handled on the
network weights θ
F
but also modifying X
s
and X
t
in
order to align the distributions at the input space.
Next, we describe the different strategies for better
data alignment that we propose to improve LiDAR
domain adaptation.
XYZ-shift Augmentation. One of the main causes
of misalignment for LiDAR point clouds is the loca-
tion of the sensor. Since the point cloud values are
relative to the sensor origin, these changes cause vari-
ations affecting the whole point cloud. We perform
shifts up to ±2 meters on the Z-axis (height) and up
to ±5 meters on the Y-axis and X-axis.
Per-class Augmentation. We also propose to per-
form the augmentation independently per class, i.e.,
applying different data augmentation parameters for
every class. In particular, in this work, we perform
shifts up to ±1 meters on the Z-axis (height) and up
to ±3 meters on the Y-axis and X-axis.
Same Number of Beams. Besides the sensor place-
ment and orientation, a significant difference between
sensors is the number of captured beams, which re-
sults in a more sparse or dense point cloud. We pro-
pose to match the data beams between the two do-
mains by reducing the data from the sensor with a
higher number of beams ending up with more homo-
geneous data within X
s
and X
t
.
Only Relative Features. Point-cloud segmentation
methods commonly use both absolute and relative
(between points) values of the input data. In order to
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
332

Figure 2: Approach overview. The figure shows our pipeline steps and optimization losses. First, we perform distribution
alignment on the input space, i.e., data alignment strategies. Then, we optimize the segmentation loss for source samples
where the labels are known and the class alignment and entropy losses for target data where no labels are available (See Sect.
3 for details). Green continuous arrows are used for target data and blue dotted arrows for source data.
be independent of absolute coordinates that are less
robust compared to relative coordinates, we propose
to use only relative features of the data. Therefore, we
propose to use only relative distances of every point
with respect to their neighbors.
3.3 Class Distribution Alignment
The domain shift appears due to many different fac-
tors. For example, different environments can present
quite different appearances, the spatial distribution of
objects may vary, the capturing set-up for different
scenarios can be totally different, etc. Depending on
the problem tackled and prior knowledge, we can hy-
pothesize which of these differences can be neglected
and assumed not to affect to the models we are learn-
ing. In this work, we tackle the domain adaptation
problem between different urban environments, since
all the datasets used are from urban scenarios. Tak-
ing this into account, although the data distribution
changes between the datasets, we can assume that the
class distribution is going to be very similar across
these scenarios since the distribution shift in urban
environments is mostly due to appearance and spatial
distribution changes. For example, we can assume
that if y
y
y
s
has a distribution of 90% road pixels and
10% car pixels, then y
y
y
t
will likely present a similar
distribution.
Our approach learns parameters θ
F
of F in such
a way that the predicted class distribution F(X
t
)
matches the real class distribution of Y
s
, i.e., the his-
togram representing the frequency of occurrence of
each class, previously computed in an offline fashion.
To do so, We propose to compute the KL-divergence
between these two class distribution as the class align-
ment loss
L
align
(x
x
x
t
, Y
s
) =
N
∑
n=1
h
h
hist(Y
s
)log
h
h
hist(Y
s
)
P
P
P
(n)
x
x
x
t
. (3)
Therefore, the optimization problem reads as:
min
θ
F
1
|X
t
|
∑
x
x
x
t
∈X
t
L
align
(x
x
x
t
, Y
s
). (4)
Equation 2 requires to compute the class distribu-
tion P
P
P
x
x
x
t
over the whole dataset. As this is computa-
tionally unfeasible, we compute it over the batch as
an approximation.
3.4 Optimization Formulation
The entropy loss is computed as in MinEnt (Vu et al.,
2019):
L
ent
(x
x
x
t
) =
−1
log(C)
N
∑
n=1
C
∑
c=1
P
P
P
(n,c)
x
x
x
t
logP
P
P
(n,c)
x
x
x
t
, (5)
while the segmentation L
seg
and class alignment
L
align
losse are computed as detailed in previous sub-
sections.
During training, we jointly optimize the super-
vised segmentation loss L
seg
on source samples and
the class alignment loss L
align
and entropy loss L
ent
on target samples. The final optimization problem is
formulated as follows:
Domain Adaptation in LiDAR Semantic Segmentation by Aligning Class Distributions
333

min
θ
F
1
|X
s
|
∑
x
x
x
s
L
seg
(x
x
x
s
, y
y
y
s
) +
λ
align
|X
t
|
∑
x
x
x
t
L
align
(x
x
x
t
, Y
s
)
+
λ
ent
|X
t
|
∑
x
x
x
t
L
ent
(x
x
x
t
),
(6)
with λ
ent
and λ
align
as the weighting factors of the
alignment and entropy terms.
4 EXPERIMENTAL SETUP
This section details the setup used in our evaluation.
This includes the datasets used in the evaluation and
the training protocol we followed.
4.1 Datasets
We use four different datasets for the evaluation.
They were collected in four different geographical
areas, with four different LiDAR sensors, and with
four different set-ups. We take the well known Se-
manticKITTI dataset (Behley et al., 2019) as the
source domain dataset and the other three datasets as
target domain data.
SemanticKITTI. The SemanticKITTI dataset
(Behley et al., 2019) is a recent large-scale dataset
that provides dense point-wise annotations. The
dataset consists of over 43000 LiDAR scans from
which over 21000 are available for training. The
dataset distinguishes 22 different semantic classes.
The capturing sensor is a Velodyne HDL-64E
mounted on a car.
Paris-Lille-3D. Paris-Lille-3D (Roynard et al.,
2018) is a medium-size dataset that provides three
aggregated point clouds. It is collected with a tilted
rear-mounted Velodyne HDL-32E placed on a vehi-
cle. Following PolarNet work (Zhang et al., 2020),
we extract individual scans from the registered point
clouds thanks to the scanner trajectory and points’
timestamps. Each scan is made of points within +/-
100m. We take the Lille-1 point cloud for the do-
main adaptation and Lille-2 for validation. We use
the following intersecting semantic classes with the
SemanticKitti: car, person, road, sidewalk, building,
vegetation, pole, and traffic light.
SemanticPoss. The SemanticPoss (Pan et al., 2020)
is a medium-size dataset which contains 5 different
sequences from urban scenarios providing 3000 Li-
DAR scans. The sensor used is a 40-line Pandora
mounted on a vehicle. We take the three first se-
quences for applying the adaptation methods and the
last two sequences for validation. We use the follow-
ing intersecting classes with the SemanticKitti: car,
person, trunk, vegetation, traffic sign, pole, fence,
building, rider, bike, and ground (combines road and
sidewalk).
I3A. We have captured a small dataset to test our ap-
proach in a different scenario. In contrast to the three
previous datasets, this dataset is not captured from a
vehicle but from a TurtleBot, having the sensor at a
lower height than in the other set-ups. The captur-
ing sensor is the Velodyne VLP-16. We capture an
urban environment similar to previous datasets. The
dataset contains two sequences, one for training and
another for validation. We use the intersecting seman-
tic classes with the SemanticKitti: car, person, road,
sidewalk, building, vegetation, trunk, pole, and traffic
light.
4.2 Training Protocol
As we mentioned in Sec. 3.1, we use 3D-MiniNet
(Alonso et al., 2020) as the base LiDAR semantic
segmentation method. In particular, we use the avail-
able 3D-MiniNet-small version because of memory
issues. For computing the relative coordinates and
features, we follow 3D-MiniNet approach extracting
them from the N neighbors of each 3D point where N
is set to 16.
For all the experiments we train this architecture
for 700K iterations with a batch size of 8. We use
Stochastic Gradient Descent (SGD) optimizer with an
initial learning rate of 0.005 and a polynomial learn-
ing rate decay schedule with a power set to 0.9.
We set λ
ent
to 0.001 as suggested in MinEnt (Vu
et al., 2019) and λ
align
to 0.001. We empirically no-
ticed that the performance is very similar when these
two hyper-parameters are set between 10
−5
and 10
−2
.
The two main conditions for them to work properly
are: (1) be greater than 0 and, (2) do not be higher
than the supervised loss.
One thing to take into account is that, as explained
in 4.1, the Paris-Lille-3D has a very limited field of
view. Therefore in order to make MinEnt (Vu et al.,
2019) work in this dataset, we had to simulate the
same field of view on the source dataset.
5 RESULTS
This section presents the experimental validation of
our approach compared to different baselines. The
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
334

Table 1: Ablation study of our domain adaption pipeline
for semantic segmentation. Source dataset: SemanticKitti
(Behley et al., 2019).
mIoU on mIoU on mIoU on
Target dataset I3A ParisLille SemanticPoss
Base model 15.9 19.2 14.0
+ XYZ-shift augmentation 25.1 28.9 16.8
+ Per-class augmentation 27.0 30.1 18.2
+ Same number of beams 42.0 35.4 19.7
+ Only relative features 47.1 — 21.8
+ MinEnt (Vu et al., 2019) 50.3 41.5 26.2
+ Class distrib. alignment 52.5 42.7 27.0
— Not used because there was no performance gain.
proposed approach achieves better results than the
other baselines in the three different scenarios for
unsupervised domain adaptation in LiDAR Seman-
tic Segmentation. In all the experiments we use the
SemanticKITTI dataset (Behley et al., 2019) as the
source data distribution and perform the adaptation on
the other three datasets.
5.1 Ablation Study
The experiments in this subsection show how the dif-
ferent data alignment steps and the proposed learning
losses affect the final performance of our approach.
Table 1 summarizes the ablation study performed on
three different scenarios. The results show how all
the steps proposed contribute towards the final per-
formance. The main insights observed in the ablation
study are discussed next.
Performing strong XYZ-shifts results in a boost on
the performance, meaning that the domain gap is con-
siderably reduced. The distribution gap reduced by
this step is the one caused by the fact of using different
LiDAR sensor set-ups (such as different acquisition
sensor height). Besides, in these autonomous driving
set-ups, the distance between the car and the objects
depends on how wide are the streets or on which lane
is the data capturing source. Therefore, this is an es-
sential and really easy data transformation to perform
which gives an average of 7.2% MIoU gain.
The per-class data augmentation also boosts the
performance. This data augmentation method tries
to reduce the domain gap by adding different relative
distances between different classes gaining an aver-
age of 1.3% MIoU gain.
Another interesting and straightforward technique
to perform is to match the number of LiDAR beams of
the source and target data, i.e., match LiDAR point-
cloud resolution. This helps the data alignment es-
pecially for having the same point density on the
3D point-cloud and similar relative distances between
the points. We show that this method gives an im-
provement similar to the XYZ-shift data augmenta-
tion, hugely reducing the domain gap. The higher the
initial difference in the number of beams, the more
improvement we can get: the i3A LiDAR has 16
beams, the ParisLille 32, and the SemanticPoss 40,
compared to the 64 of the source data (SemanticKitti).
The use of relative features only does not always
help to reduce the domain gap, it was only benefi-
cial on the i3A and SemanticPoss datasets. Remov-
ing the absolute features and only learning from rel-
ative features helps especially when the relative dis-
tances between the 3D points have less domain shift
than the absolute coordinates. This will depend on the
dataset, but the stronger the differences between cap-
turing sensors, the more likely that the use of relative
features will help.
Besides the data alignment steps, our approach in-
cludes two learning losses to the pipeline to help to re-
duce the domain gap. The first one is the entropy min-
imization loss proposed in MinEnt (Vu et al., 2019).
The second one is our proposed class distribution
alignment loss introduced in this work. We show
that these two losses can be combined for the do-
main adaptation problem and that, although less sig-
nificantly with respect to previously discussed steps,
they also improve on the three different set-ups, con-
tributing to achieving state-of-the-art performance.
5.2 Comparison with Other Baselines
Table 2: Results on the three different LiDAR semantic seg-
mentation datasets using different domain adaptation meth-
ods. The source dataset is the SemanticKitti dataset (Behley
et al., 2019).
mIoU on mIoU on mIoU on
I3A ParisLille SemanticPoss
Baseline 15.9 19.2 13.4
MinEnt (Vu et al., 2019) 28.4 23.2 19.6
AdvEnt (Vu et al., 2019) 21.0 20.7 19.5
MaxSquare (Chen et al., 2019) 28.4 22.8 19.3
Data alignment (ours)* 47.1 36.2 19.0
Full approach (ours) 52.5 42.7 27.0
* Only data alignment strategies from Sect. 3.2
Table 2 shows the comparison of our pipeline (com-
posed of all the steps discussed in the ablation study)
with other existing methods for domain adaptation.
We select MinEnt, Advent, and MaxSquare as the
baselines because they are leading the state-of-the-
art for unsupervised domain adaptation. We use the
available authors’ code for replication.
We apply the different domain adaptation meth-
ods of the three different set-ups without our data
alignment steps. This comparison shows that good
pre-processing of the data can obtain better results
than just applying out-of-the-box methods for domain
adaptation. It also shows that our complete pipeline
outperforms these previous methods on LiDAR do-
main adaptation. Our results demonstrate that com-
Domain Adaptation in LiDAR Semantic Segmentation by Aligning Class Distributions
335

Figure 3: LiDAR domain adaptation results for different methods and datasets: I3A dataset first row, ParisLille dataset second
row, and SemanticPoss last row. From left to right: Input point cloud, ground truth labels, baseline with no adaptation (trained
on SemanticKitti), MinEnt (Vu et al., 2019), our adaptation only with data processing strategies, our full adaptation pipeline.
Best viewed in color. For better and more detail (video result) go to https://youtu.be/EpkJ UH1F-o.
bining proper data processing with learning methods
for domain adaptation gives an average of more than
×2 boost on the performance.
Figure 3 includes a few examples of the seg-
mentation obtained with a baseline with no domain
adaptation, using the MinEnt (Vu et al., 2019) ap-
proach only, with our approach using only the data
pre-processing steps, and with our approach includ-
ing all steps proposed. We can appreciate in fig-
ure 3 how data processing helps on certain semantic
classes, such as road, person, car, or vegetation, while
MinEnt usually improves at different ones like build-
ing. This suggests the good complementary of both
strategies, and indeed combining them provides the
best results. More detail in additional video results
can be seen at https://youtu.be/EpkJ UH1F-o.
6 CONCLUSIONS
In this work, we introduce a novel pipeline that ad-
dresses the task of unsupervised domain adaptation
for LiDAR semantic segmentation. Our pipeline con-
sists of aligning data distributions on the data space
with different simple strategies combined with learn-
ing losses on the semantic segmentation process that
also force the data distribution alignment. Our re-
sults show that a proper data alignment on the input
space can produce better domain adaptation results
that just using out-of-the-box state-of-the-art learn-
ing methods. Besides, we show that combining these
data alignment methods with learning methods, like
the one proposed in this work to align the class distri-
butions of the data, can reduce even more the domain
gap getting new state-of-the-art results. Our approach
is validated on three different scenarios, from differ-
ent datasets, as the target domain, where we show
that our full pipeline improves previous methods on
all three scenarios.
ACKNOWLEDGMENTS
This project was partially funded by projects FEDER/
Ministerio de Ciencia, Innovaci
´
on y Universidades/
Agencia Estatal de Investigaci
´
on/RTC-2017-6421-7,
PGC2018-098817-A-I00 and PID2019-105390RB-
I00, Arag
´
on regional government (DGA T45
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
336

17R/FSE) and the Office of Naval Research Global
project ONRG-NICOP-N62909-19-1-2027.
REFERENCES
Alonso, I., Riazuelo, L., Montesano, L., and Murillo, A. C.
(2020). 3d-mininet: Learning a 2d representation
from point clouds for fast and efficient 3d lidar se-
mantic segmentation. IEEE Robotics and Automation
Society, RAL.
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Stachniss, C., and Gall, J. (2019). SemanticKITTI:
A dataset for semantic scene understanding of lidar
sequences. In Proceedings of the IEEE International
Conference on Computer Vision.
Chen, M., Xue, H., and Cai, D. (2019). Domain adaptation
for semantic segmentation with maximum squares
loss. In Proceedings of the IEEE International Con-
ference on Computer Vision, pages 2090–2099.
Ganin, Y., Ustinova, E., Ajakan, H., Germain, P.,
Larochelle, H., Laviolette, F., Marchand, M., and
Lempitsky, V. (2016). Domain-adversarial training of
neural networks. The journal of machine learning re-
search, 17(1):2096–2030.
Hoffman, J., Tzeng, E., Park, T., Zhu, J.-Y., Isola, P.,
Saenko, K., Efros, A., and Darrell, T. (2018). Cycada:
Cycle-consistent adversarial domain adaptation. In
International conference on machine learning, pages
1989–1998.
Jaritz, M., Vu, T.-H., Charette, R. d., Wirbel, E., and P
´
erez,
P. (2020). xmuda: Cross-modal unsupervised domain
adaptation for 3d semantic segmentation. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 12605–12614.
Li, Y., Yuan, L., and Vasconcelos, N. (2019). Bidirectional
learning for domain adaptation of semantic segmenta-
tion. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 6936–
6945.
Mei, J., Gao, B., Xu, D., Yao, W., Zhao, X., and Zhao,
H. (2019). Semantic segmentation of 3d lidar data in
dynamic scene using semi-supervised learning. IEEE
Transactions on Intelligent Transportation Systems,
21(6):2496–2509.
Milioto, A., Vizzo, I., Behley, J., and Stachniss, C. (2019).
Rangenet++: Fast and accurate lidar semantic seg-
mentation. In Proceedings of the IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS).
Pan, Y., Gao, B., Mei, J., Geng, S., Li, C., and Zhao, H.
(2020). Semanticposs: A point cloud dataset with
large quantity of dynamic instances. arXiv preprint
arXiv:2002.09147.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 652–660.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. In Advances in neural information
processing systems, pages 5099–5108.
Rosu, R. A., Sch
¨
utt, P., Quenzel, J., and Behnke, S. (2019).
Latticenet: Fast point cloud segmentation using per-
mutohedral lattices. arXiv preprint arXiv:1912.05905.
Roynard, X., Deschaud, J.-E., and Goulette, F. (2018).
Paris-lille-3d: A large and high-quality ground-truth
urban point cloud dataset for automatic segmenta-
tion and classification. The International Journal of
Robotics Research, 37(6):545–557.
Sun, B., Feng, J., and Saenko, K. (2017). Correlation align-
ment for unsupervised domain adaptation. In Domain
Adaptation in Computer Vision Applications, pages
153–171. Springer.
Tzeng, E., Hoffman, J., Saenko, K., and Darrell, T. (2017).
Adversarial discriminative domain adaptation. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 7167–7176.
Vu, T.-H., Jain, H., Bucher, M., Cord, M., and P
´
erez, P.
(2019). Advent: Adversarial entropy minimization for
domain adaptation in semantic segmentation. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 2517–2526.
Wang, M. and Deng, W. (2018). Deep visual domain adap-
tation: A survey. Neurocomputing, 312:135–153.
Wu, B., Wan, A., Yue, X., and Keutzer, K. (2018). Squeeze-
seg: Convolutional neural nets with recurrent crf for
real-time road-object segmentation from 3d lidar point
cloud. In 2018 IEEE International Conference on
Robotics and Automation (ICRA), pages 1887–1893.
IEEE.
Wu, B., Zhou, X., Zhao, S., Yue, X., and Keutzer, K.
(2019). Squeezesegv2: Improved model structure
and unsupervised domain adaptation for road-object
segmentation from a lidar point cloud. In 2019 In-
ternational Conference on Robotics and Automation
(ICRA), pages 4376–4382. IEEE.
Xie, Y., Tian, J., and Zhu, X. X. (2019). A review of
point cloud semantic segmentation. arXiv preprint
arXiv:1908.08854.
Yang, Y. and Soatto, S. (2020). Fda: Fourier domain adap-
tation for semantic segmentation. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 4085–4095.
Zhang, Y., Zhou, Z., David, P., Yue, X., Xi, Z., Gong, B.,
and Foroosh, H. (2020). Polarnet: An improved grid
representation for online lidar point clouds semantic
segmentation. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 9601–9610.
Zhou, Y. and Tuzel, O. (2018). Voxelnet: End-to-end learn-
ing for point cloud based 3d object detection. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 4490–4499.
Zou, Y., Yu, Z., Liu, X., Kumar, B., and Wang, J. (2019).
Confidence regularized self-training. In Proceedings
of the IEEE International Conference on Computer
Vision, pages 5982–5991.
Domain Adaptation in LiDAR Semantic Segmentation by Aligning Class Distributions
337
