
Strawberry Disease Detection in Precision Agriculture
Aguirre Santiago, Leonardo Solaque and Alexandra Velasco
Department of Engineering, Universidad Militar Nueva Granada, Bogot
´
a, Colombia
Keywords:
Precision Agriculture, Object Detection, Deep Learning, Crops Disease, Strawberry Crops.
Abstract:
Crop disease detection in precision agriculture has an important impact on farming, improving production, and
reducing economic losses. This is why some efforts have been done in this direction. This paper compares 4
object detection algorithms based on deep learning to detect diseases in strawberry crops. Here, we present a
step towards detecting the most common diseases to prevent economical losses. The main purpose is to detect
mainly three diseases of the strawberry crops, i.e. Botrytis cinerea, Leaf scorch, and Powdery mildew, to take
further actions if the crops are unhealthy. We have chosen these three diseases because these are frequent
and unpredictable issues, and the risk of infection is high. For this, we trained four algorithms, two based on
Single Shot MultiBox Detector and two based on EfficientDet algorithm. We focus the analysis on the two
best results based on the mean average precision. We have used Google colab for training, then a Core i5 host
computer and an Nvidia Jetson nano were used for testing. We have achieved a detection network with a mean
average precision of 81% in the best case, in detecting the three proposed classes. While using an NVIDIA
Jetson nano, the accuracy increases up to 86% due to the dedicated GPU that processes Convolutional Neural
Networks(CNN).
1 INTRODUCTION
Precision agriculture has recently gained much atten-
tion due to the increasing needs of the population
around the world. There are several applications, such
as (Torky and Hassanein, 2020),(Srivastava et al.,
2019), and (Priya and Ramesh, 2020), where tech-
nologies as Blockchain or Internet of things are
brought into the agricultural field. For example, in
((Klerkx et al., 2019) and (Lezoche et al., 2020)), cur-
rent applications that involve computer vision are ad-
dressed. Moreover, machine learning is used in ap-
plications as classification (e.g. (
¨
Umit Atila et al.,
2021),(Mathew et al., 2020), (Chouhan et al., 2020))
and disease detection (e.g. (Gomez Selvaraj et al.,
2020), (Mojjada et al., 2020), (Chen et al., 2020)).
Several machine learning techniques for object
detection have also been developed. For example, a
method based on deep convolution neural networks,
released in 2014 is the Region-based Convolutional
Network (R-CNN) (Girshick et al., 2013). Since then,
there have been improvements to this technique, e.g.
Fast R-CNN (Girshick, 2015), and Faster R-CNN.
(Ren et al., 2015). Other detection networks, such as
YOLO (YouOnlyLookOnce) (Redmon and Farhadi,
2017) and EfficientDet (Tan et al., 2020) can also be
used for object detection. For further information on
this topic, the reader is encouraged to review (Wu
et al., 2020).
Precision agriculture is a highly growing technol-
ogy that aims to bring technology into farming pro-
cess. Crops suffer from various diseases that need to
be controlled, to prevent other problems that at their
time led to money looses. There are defined ways in
agriculture to control or prevent diseases, e.g. apply-
ing different products, pruning, and so on. In fields
like fruit farming, to make decisions regarding dis-
eases prevention, e.g. fungicide application in a pre-
ventive way, information about the crops is required,
including data from the leaves and the fruit. This in-
formation can be obtained from RGB images. There-
fore, in this paper, we address the problem of object
detection using artificial intelligence, as a method to
detect diseases in strawberry crops. We compare 4
object detection algorithms, analyzing the ones that
achieve the highest mean average precision (mAP).
The analysis allows to choose the one that performs
the task more accurately, regarding the mAP criterion.
In the literature, there are different solutions to the
problem of crops disease detection in precision agri-
culture, with different targets. For example, regard-
ing machine learning techniques for classification, in
Santiago, A., Solaque, L. and Velasco, A.
Strawberry Disease Detection in Precision Agriculture.
DOI: 10.5220/0010616405370544
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 537-544
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
537

(Mathew et al., 2020), authors propose a methodology
for the classification of three important foliar diseases
in the banana crop, using texture features as ellipti-
cal local binary pattern. This method has a great ac-
curacy in classifying the diseases. However, it does
not give information about the location of the disease.
Moreover, in (Park et al., 2017), the authors propose a
deep learning mechanism to diagnose and predict dis-
eases in strawberry’s leaf and fruit. In this case, the
image has to be taken close to the fruit, and then it
has to be processed in a different engine. Regarding
leaf diseases classification, in (Chouhan et al., 2020)
a computer vision methodology to automate the dis-
ease diagnosis of Jatropha Curcas (Huang et al., 2020)
is proposed with high classification accuracy. In this
case, the authors have identified that increasing the
segmentation performance and using a Deep neural
network for the classification task would yield to bet-
ter results, due to the difference between the use of
artificial intelligence algorithms there is no room for
comparison, because the authors use AI to classify
whereas in this article, it is to detect.
There are other solutions to the scope problem that
do not use artificial intelligence, but they use digi-
tal image processing. For example, in (Sheikh et al.,
2019) the authors implemented an image processing
algorithm and deep learning methods on images of
crops with diseases, to help the farmers to cultivate
and reducing the diseases. The algorithm has a great
accuracy, but it does not provide the location of the
disease in the plant. Moreover, the work is only fo-
cused in detecting problems in the leaves. Regard-
ing only image processing, for instance in (Prakash
et al., 2017), the authors propose a framework that
includes image preprocessing, Segmentation using
clustering feature extraction by statistical Gray-Level
Co-Occurrence Matrix (GLCM) & Classification of
diseases using Suport Vector Machines(SVM). This
algorithm could be implemented in different plant
species with few changes.
Object detection can be applied to solve other
tasks such as position tracking, which is useful in
many fields such as autonomous driving. For ex-
ample, this problem can be solved with deep learn-
ing algorithms, training a detection Network such as
YOLO and analyzing the changes in the generated
detection. In (Ciaparrone et al., 2020), the authors
provide a survey on Deep Learning Models that solve
the task of Multiple Object Tracking on single-camera
videos, comparing several models and demonstrating
that Deep Learning algorithms are as effective solving
this task as solutions such as LiDar and depth images.
In this paper, we show a comparison of 4 algo-
rithms to detect strawberry diseases, i.e. powdery
mildew, botrytis cinerea, leaf scorch, immature straw-
berry, and healthy strawberries. At the end, we deter-
mine the best detection algorithm based on the best
mAP. For this, we trained two deep learning based
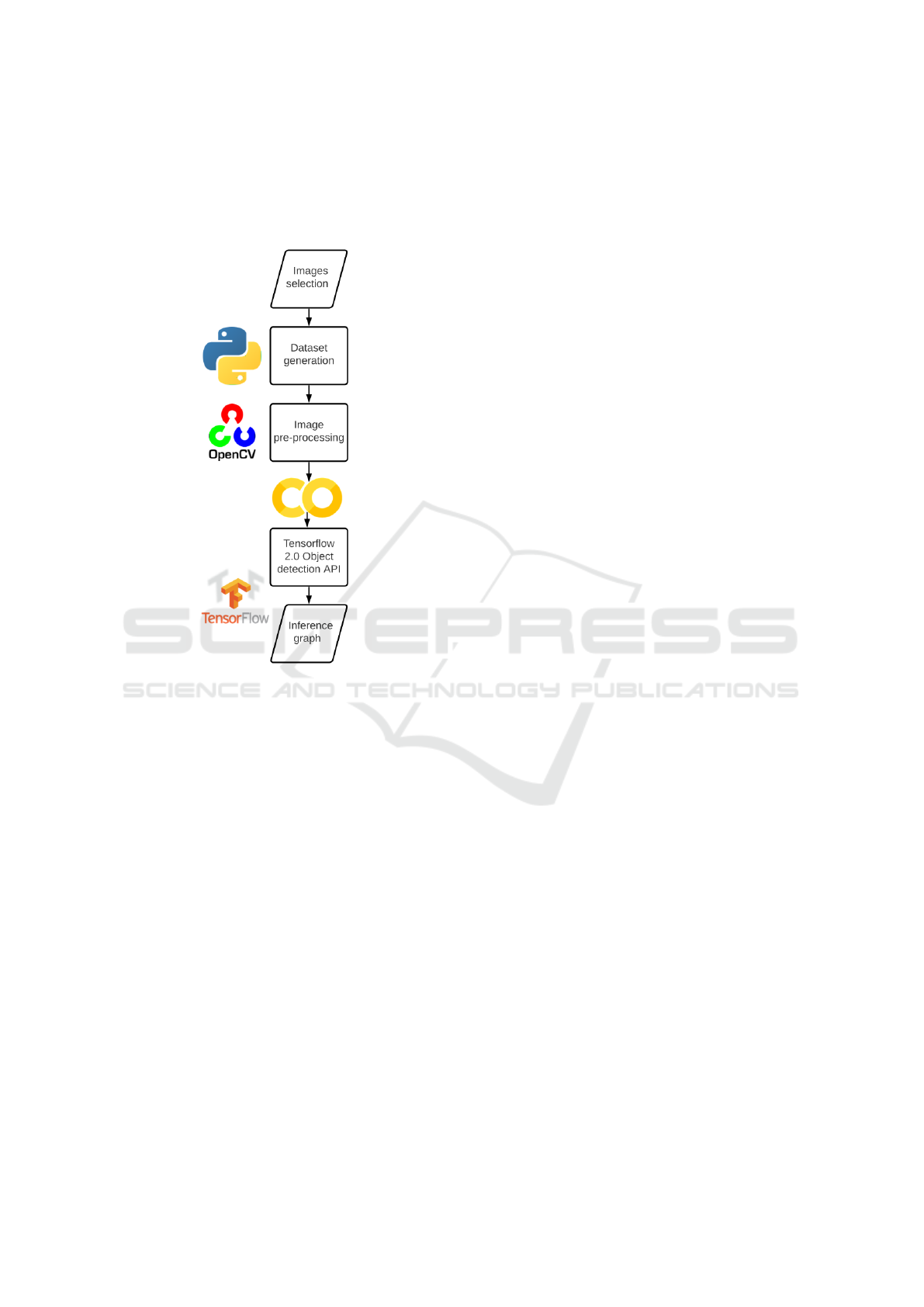
object detection algorithms in a custom dataset. Fig.1
illustrates the implemented strategy. First, we cre-
ate a custom dataset for the required classes using
some data sources. Then, we have an image pro-
cessing stage where we normalize the images, for this
we use the OpenCV library. We generate an infer-
ence graph that can be used in other computers with
lower specifications than the host computer. This was
done employing the Tensorflow 2.0, an object detec-
tion API, as deep learning framework. The model was
trained in Google colab with Intel(R) Xeon(R) CPU
@ 2.20GHz and 16GB NVIDIA Tesla T4 GPU. How-
ever, the trained models were tested in an Intel Core
i5-7200 with 2 GB NVIDIA Geforce MX940 GPU.
We aim to detect 3 common diseases and two
growing states in the strawberry crops, with the idea
of taking corrective actions using the CERES agricul-
tural robot. We address the strategy to detect the dis-
eases and the growing states, while the decision mak-
ing algorithm is not part of this paper.
In section 2 we present the complete strategy for
object detection, showing how we trained the ob-
ject detection algorithms and the image processing as
well. Section 2.1 presents how and why we selected
the proposed classes. We analyze the results in sec-
tion 3, and we give some conclusions and recommen-
dations in section 4.
2 METHODS
In this section, we describe the strategy used to de-
tect strawberry diseases. To do this, we trained the
EfficientDet detection network model with efficient-
Net, (Tan et al., 2020), Single Shot MultiBox Detec-
tor(SSD) with Resnet 50 (Liu et al., 2015), SSD with
mobilenet V2. Every detection network uses differ-
ent methods to solve the detection process, Efficient-
Det, works with EfficientNet (Tan and Le, 2019) as
the backbone network, BiFPN as the feature network,
and shared class/box prediction network. SSD works
with Resnet 50 (He et al., 2015) as backbone. It is
a feed-forward convolutional network that produces a
fixed-size collectionThe more accurate the model is
the of bounding boxes and scores for the presence of
object class instances in those boxes, followed by a
non-maximum suppression step to produce the final
detections.
For the purpose of our work, we trained every de-
tection network with a custom dataset created with
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
538
PlantDoc dataset (Singh et al., 2019), Strawberry
dataset (P
´
erez-Borrero et al., 2020) and a custom dat-
set created from Google images. The former dataset
contains 450 images. The hole dataset has a complex
background with a remarkable light change.
Figure 1: Implemented strategy and project pipeline.
2.1 Data Acquisition
In this paper we aim to detect some of the most com-
mon strawberry diseases, as well as immature and
healthy strawberries. The selected diseases in this
project were:
• Powdery Mildew: This is a fungal disease which
affects a wide range of field crops, trees, shrubs,
vines, flowers, vegetables, fruits, grasses, and
weeds. The most common symptom in the in-
fected plants is the presence of white powdery
spots on leaves and stems. The lower leaves are
the most affected part, but the disease can appear
in any part of the plant. Additionally, powdery
mildew, causes powdery growth on the surface of
young shoots, leaves, flowers, and fruits. Pow-
dery mildew is caused by many variants of fun-
gal species in the genera Erysiphe, Microsphaera,
Phyllactinia, Podosphaera, Sphaerotheca, and
Uncinula(Carisse and Fall, 2021).
• Botrytis Cinerea: It is a fungal pathogen that
causes grey mould mainly in the fruits. This
pathogen affects the fruits in the field, storage,
transport and market. The presence of grey mould
is the most common reason for fruit rejection by
growers, shippers and consumers, leading to sig-
nificant economic losses (Petrasch et al., 2019).
• Leaf Scorch: It is caused by a fungal infection
which affects the foliage of strawberry plantings.
The fungal species responsible are called Diplo-
carpon earliana. Strawberries with leaf scorch
may first show signs of issue with the develop-
ment of small purplish blemishes that occur on the
topside of leaves. If the disease is allowed to ad-
vance, the spots will grow larger and darker. In
the worst cases, those spots may even cover entire
portions of the crop, including plant leaves and
cause them to completely dry and fall from the
plant.
• Inmature Strawberry: this includes fruit light in
mass, stunted or distinctly rubbery in texture. In
the case of the strawberry, it is also caracterized
by a green color.
• Healthy Strawberry: Fruit in great conditions.
For further information of the diseases and the straw-
berry’s growing, the reader is referred to (Hancock
et al., 2008) and (Vanti et al., 2021).
The proposed dataset consists of 450 images split-
ted in a training set with 300 positive images. The
test set has 100 positive images and the validation test
set consists of 50 images. For each class, there is an
amount of 90 images distributed in 60 images for the
training set, 10 images for the validation set and 20
images for the test set. However, the number of anno-
tations per class is:
• Powdery Mildew: 188 annotations.
• Botrytis Cinerea: 179 annotations.
• Leaf Scorch: 174 annotations.
• Inmature Strawberry: 193 annotations.
• Strawberry: 186 annotations.
2.2 Object Detection
Object detection algorithms have many applications
such as autonomous driving. For example, companies
like Tesla, Apple, Toyota, Nissan, etc., use them to
avoid collisions during a course (Wang et al., 2020).
In this paper, we compare 4 object detection algo-
rithms and we define which one fits better with our re-
quirements to be implemented in the CERES agricul-
tural robot (Santiago. et al., 2020), based on the mAP.
For this, we detect the 5 classes mentioned before.
The proposed architecture is shown in Fig. 2. The
Strawberry Disease Detection in Precision Agriculture
539

Figure 2: Proposed architecture for the research.
process consists of an image acquisition step; then,
the detection algorithm returns the bounding boxes
with the detection, and the detected class. In this sec-
tion, we show the training process for each detection
network and the image pre-processing stage, Fig. 1 il-
lustrates the flowchart of the strategy proposed in this
paper.
2.3 Models Training
The first stage of the training process includes im-
age prepossessing and normalization, as shown in Fig.
1. This is done in OpenCV, where we apply trans-
formations such as random horizontal flip, crop and
re-scale, to get more images for the process. Then,
the re-sizing process for our images varies depend-
ing of the detection algorithm, e.g for EfficientDet,
the image input shape is 512x512 pixels. After that,
we normalize the images between 0-1, and finally, we
change the image format to RGB, because OpenCV
works with BGR image format. In this way, we have
data ready to train the object detection models.
The training process is shown in Fig. 3. We tested
two object detection deep learning based algorithms
with different backbone CNN. The training process
consists of five steps. First, the generation of the
record files, which is done by running some python
scripts after labeling every single image in the dataset.
This is done because the data are in ’xml’ format, but
it is needed in ’recod’ data format. The second step
is to select the backbone Convolutional Neural Net-
work (CNN) for the detection algorithm. In table 1
we show the CNN for each iteration. The fourth step
includes the setting of the training options, which are
also shown in Table 1. Those hyperparameters were
chosen to avoiding overfitting of the obtained results.
Finally, a label map for the classes to start training the
algorithms is required.
Additionally, the batch size of each training pro-
cess is limited by the hardware capacity. Our host
computer reduced the batch size of 1, while in Google
colab we were able to use a batch between 8 to 16, due
the Testa T4 GPUs provided.
3 RESULTS AND ANALYSIS
In this section we present and explain the results of
training the two algorithms, i.e. EfficientDet-D0 and
SSD-Resnet50. These two algorithms give us the best
practical results based on the mean average precision
(mAP).
Testing was carried out with the test set, which
contains 100 images. However, the hyperparameters
change in each training iteration. In table 1 we show
the number of training iterations done for each algo-
rithm. Every model iteration was tested in a 50 im-
ages validation set. During the experimentation pro-
cess, we used a 60% threshold during the detection
task.
The tests consisted on the detection process of an
image test set. The results of the detector, the scores,
Table 1: Training parameters for each detection algorithm.
Train iterations Algorithm Backbone CNN Iterations Input shape Batch size
5 EfficientDet-d0 EfficientNet 20000 512x512 16
4 SSD Resnet 50 15000 640x640 8
2 EfficientDet-d3 EfficientNet 10000 768x768 8
2 SSD Mobilenet 10000 320x320 16
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
540

Figure 3: Training process for the detection algorithms.
and the bounding boxes per image are compared with
the ground truth proposed for the test set. The ground
truth is a table that contains the information about the
location of the image on the computer where the test
is carried out, and the bboxes of each image. The
trained models were tested in a NVIDIA JETSON
Nano ARM
R
Cortex
R
-A57 MPCore with Maxwell
128 GPU Uand in an Intel Core i5-7200 with 2 GB
NVIDIA Geforce MX940 GPU.
The average precision is defined as the average of
the precision scores after each true positive. The mAP
compares the ground-truth bounding box with the de-
tected box. The more accurate the model, the higher
the mAP value. In Table 2, the Average precision re-
sults per class are shown as well as the mAP of each
detection network.
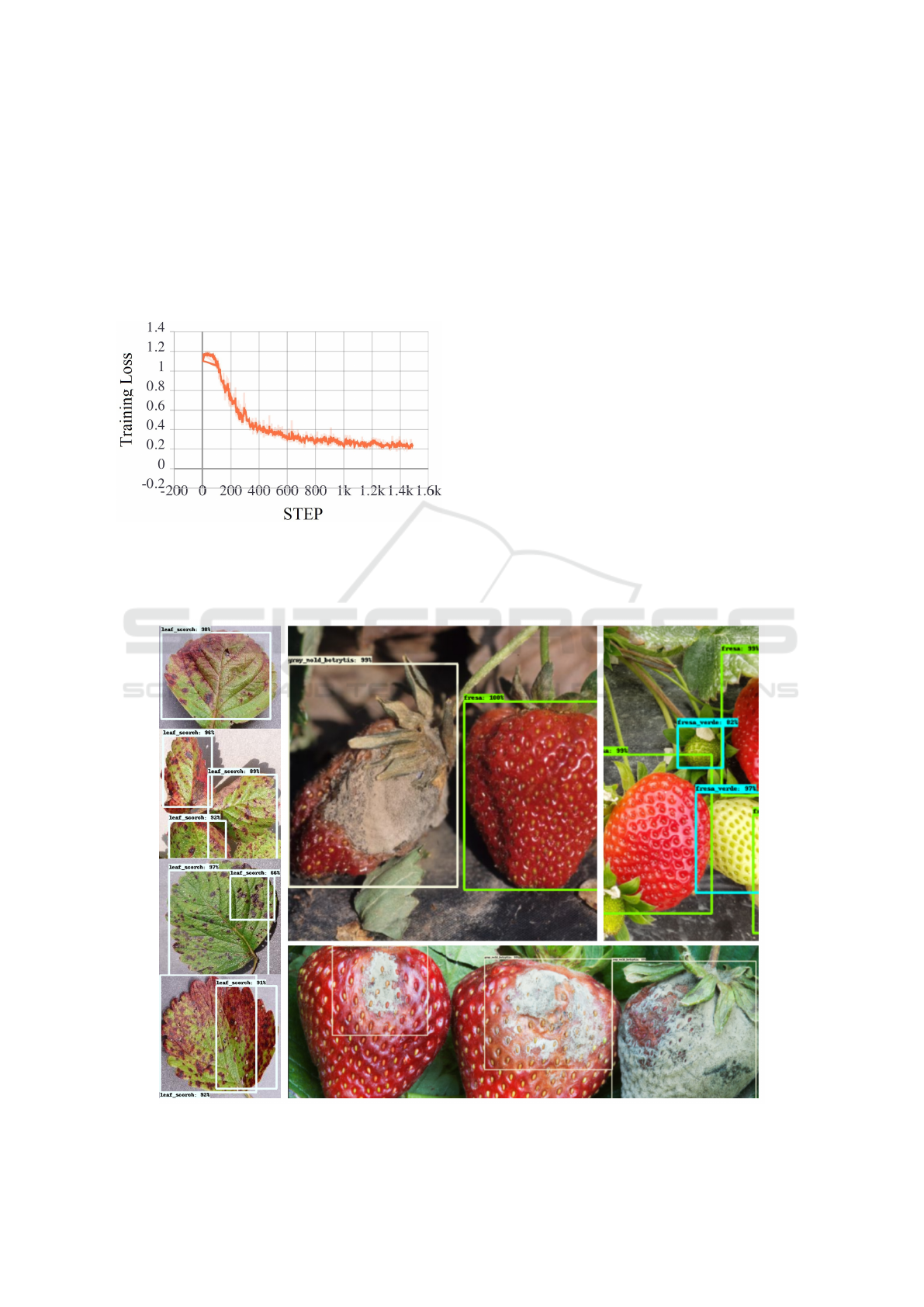
3.1 EfficientDet-D0
The training process with the dataset proposed in sec-
tion 2.1 lasted 175 minutes, using Intel(R) Xeon(R)
CPU @ 2.20GHz and 16GB NVIDIA Tesla T4 GPU
provided by Google Colab. In Fig. 4 the training loss
by the epochs is shown. The final training iteration
process consisted of 15000 iterations with 16 Batch
size. According to the amount of data used to train
Figure 4: Training loss graph for EfficientDet - EfficientNet
D0.
the detector, we achieved a mAP of 81% in the Core
i5 Computer, and 86% with a minimum error of 0.034
in the NVIDIA Jetson Nano which reflects the action
of the cuBlas and cuDNN libraries which increases
the detection accuracy in 5% on the Jetson with re-
spect to the Core i5 computer. The inference time is
about 300 ms. This was the best result obtained during
the trials. The training iterations are shown in table 1.
Table 2: Detection rates.
Strawberry Inmature Straw Powdery Mildew Botrytis Leaft Scoarch MAP
EfficientDet-D0 92 88 76 89 86 86,2
EfficientDet-D3 95 92 64 72 80 80,6
SSD-Resnet50 90 85 78 81 80 82,8
SSD-Mobilenet 76 78 68 80 74 75,2
Strawberry Disease Detection in Precision Agriculture
541
3.2 SSD-Resnet50
The training process with the dataset proposed in sec-
tion 2.1 lasted 200 minutes, using Intel(R) Xeon(R)
CPU @ 2.20GHz and 16GB NVIDIA Tesla T4 GPU
provided by Google Colab. In Fig. 4 the training loss
by the epochs is shown. The final training iteration
process consisted on 20000 iterations with 8 Batch
size.
Figure 5: Training loss graph for SSD - resnet 50.
According to the amount of data used to train the
detector, we achieved a mAP of 77% in the Core i5
Computer, and 83% with a minimum error of 0.034
in the NVIDIA Jetson Nano , which evidences that
the cuBlas and cuDNN libraries increase the detection
accuracy in 6% on the Jetson with respect to the Core
i5 computer. The inference time is about 215 ms.
In Fig. 6 we show a set of output images of the
best model, that in our case, for the proposed task was
EfficientDet-D0.
4 CONCLUDING REMARKS
In this paper, we chose a strategy to detect diseases
in strawberry crops. To do this, we compared 4 ob-
ject detection algorithms based on deep learning, and
we presented the best two algorithms regarding their
mean average precision (mAP). With the chosen strat-
egy we detect three diseases of the strawberry crops,
and two growing states, i.e. immature strawberry and
healthy strawberry.
For this work we used Google colab. Then a
Core i5 host computer and a Nvidia Jetson nano were
used for testing. We have achieved a detection net-
work with a mAP of 81% in detecting the three pro-
posed diseases (classes). While using a NVIDIA Jet-
Figure 6: Results of detecting the proposed classes.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
542

son nano, the accuracy increases up to 86% due to
the dedicated GPU that process Convolutional Neural
Networks(CNN).
The use of better detection datasets would in-
crease the obtained mAP, mainly in the detection of
powdery mildew disease, where the average precision
was of 75% in the EfficientDet-D0 best train iteration.
Moreover, an optimization step regarding the Nvidia
Jetson nano with TensorRT would decrease the infer-
ence time. We will address this in our future work for
the implementation of the algorithm in the CERES
agro-robot (Santiago. et al., 2020).
ACKNOWLEDGEMENTS
This work is funded by Universidad Militar Nueva
Granada- Vicerrectoria de Investigaciones, under re-
search grant for project INV ING 3185 “Sistema de
toma de decisiones para la aplicaci
´
on de medidas cor-
rectivas que ayuden a mantener la salud de un cultivo
de hortalizas utilizando un robot (CERES) dedicado a
labores de agricultura”.
REFERENCES
Carisse, O. and Fall, M. (2021). Decision trees to
forecast risks of strawberry powdery mildew caused
by podosphaera aphanis. Agriculture (Switzerland),
11(1):1–16. cited By 0.
Chen, J., Yin, H., and Zhang, D. (2020). A self-adaptive
classification method for plant disease detection using
gmdh-logistic model. Sustainable Computing: Infor-
matics and Systems, 28:100415.
Chouhan, S., Singh, D. U., Sharma, U., and Jain, S. (2020).
Leaf disease segmentation and classification of jat-
ropha curcas l. and pongamia pinnata l. biofuel plants
using computer vision based approaches. Measure-
ment, 171.
Ciaparrone, G., S
´
anchez, F. L., Tabik, S., Troiano, L., Tagli-
aferri, R., and Herrera, F. (2020). Deep learning in
video multi-object tracking: A survey. Neurocomput-
ing, 381:61 – 88.
Girshick, R. (2015). Fast r-cnn. In 2015 IEEE International
Conference on Computer Vision (ICCV), pages 1440–
1448.
Girshick, R. B., Donahue, J., Darrell, T., and Malik, J.
(2013). Rich feature hierarchies for accurate ob-
ject detection and semantic segmentation. CoRR,
abs/1311.2524.
Gomez Selvaraj, M., Vergara, A., Montenegro, F., Alonso
Ruiz, H., Safari, N., Raymaekers, D., Ocimati, W.,
Ntamwira, J., Tits, L., Omondi, A. B., and Blomme,
G. (2020). Detection of banana plants and their major
diseases through aerial images and machine learning
methods: A case study in dr congo and republic of
benin. ISPRS Journal of Photogrammetry and Remote
Sensing, 169:110 – 124.
Hancock, J., Sjulin, T., and Lobos, G. (2008). Strawberries,
volume 9781402069079. cited By 36.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Huang, J.-D., Wang, C.-F., Lian, C.-L., Huang, M.-Y.,
Zhang, C., and Liu, J.-Q. (2020). Isolation and identi-
fication of five new diterpenoids from jatropha curcas.
Phytochemistry Letters, 40:37–41.
Klerkx, L., Jakku, E., and Labarthe, P. (2019). A review
of social science on digital agriculture, smart farming
and agriculture 4.0: New contributions and a future
research agenda. NJAS - Wageningen Journal of Life
Sciences, 90-91:100315.
Lezoche, M., Hernandez, J. E., del Mar Eva Alemany D
´
ıaz,
M., Panetto, H., and Kacprzyk, J. (2020). Agri-food
4.0: A survey of the supply chains and technologies
for the future agriculture. Computers in Industry,
117:103187.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S. E.,
Fu, C., and Berg, A. C. (2015). SSD: single shot multi-
box detector. CoRR, abs/1512.02325.
Mathew, D., Sathish Kumar, C., and Anita Cherian, K.
(2020). Foliar fungal disease classification in banana
plants using elliptical local binary pattern on multires-
olution dual tree complex wavelet transform domain.
Information Processing in Agriculture.
¨
Umit Atila, Uc¸ar, M., Akyol, K., and Uc¸ar, E. (2021).
Plant leaf disease classification using efficientnet deep
learning model. Ecological Informatics, 61:101182.
Mojjada, R. K., Kiran Kumar, K., Yadav, A., and Satya Vara
Prasad, B. (2020). Detection of plant leaf disease us-
ing digital image processing. Materials Today: Pro-
ceedings.
Park, H., Eun, J., and Kim, S. (2017). Image-based dis-
ease diagnosing and predicting of the crops through
the deep learning mechanism. In 2017 International
Conference on Information and Communication Tech-
nology Convergence (ICTC), pages 129–131.
Petrasch, S., Knapp, S. J., van Kan, J. A. L., and Blanco-
Ulate, B. (2019). Grey mould of strawberry, a devas-
tating disease caused by the ubiquitous necrotrophic
fungal pathogenBotrytis cinerea. Molecular Plant
Pathology, 20(6):877–892.
Prakash, R. M., Saraswathy, G. P., Ramalakshmi, G., Man-
galeswari, K. H., and Kaviya, T. (2017). Detection
of leaf diseases and classification using digital image
processing. In 2017 International Conference on In-
novations in Information, Embedded and Communi-
cation Systems (ICIIECS), pages 1–4.
P
´
erez-Borrero, I., Mar
´
ın-Santos, D., Geg
´
undez-Arias,
M. E., and Cort
´
es-Ancos, E. (2020). A fast and ac-
curate deep learning method for strawberry instance
segmentation. Computers and Electronics in Agricul-
ture, 178:105736.
Priya, R. and Ramesh, D. (2020). Ml based sustainable
precision agriculture: A future generation perspec-
Strawberry Disease Detection in Precision Agriculture
543

tive. Sustainable Computing: Informatics and Sys-
tems, 28:100439.
Redmon, J. and Farhadi, A. (2017). Yolo9000: Better,
faster, stronger. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
6517–6525.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Cortes, C., Lawrence, N. D.,
Lee, D. D., Sugiyama, M., and Garnett, R., editors,
Advances in Neural Information Processing Systems
28, pages 91–99. Curran Associates, Inc.
Santiago., A., Solaque., L., and Velasco., A. (2020). Deep
learning algorithm for object detection with depth
measurement in precision agriculture. In Proceed-
ings of the 17th International Conference on Informat-
ics in Control, Automation and Robotics - Volume 1:
ICINCO,, pages 490–497. INSTICC, SciTePress.
Sheikh, M. H., Mim, T. T., Reza, M. S., and Hena, M. H.
(2019). Leaf diseases detection for commercial cul-
tivation of obsolete fruit in bangladesh using image
processing system. In 2019 8th International Confer-
ence System Modeling and Advancement in Research
Trends (SMART), pages 271–275.
Singh, D., Jain, N., Jain, P., Kayal, P., Kumawat, S., and
Batra, N. (2019). Plantdoc: A dataset for visual plant
disease detection. CoRR, abs/1911.10317.
Srivastava, K., Bhutoria, A. J., Sharma, J. K., Sinha, A.,
and Pandey, P. C. (2019). Uavs technology for the de-
velopment of gui based application for precision agri-
culture and environmental research. Remote Sensing
Applications: Society and Environment, 16:100258.
Tan, M. and Le, Q. V. (2019). Efficientnet: Rethink-
ing model scaling for convolutional neural networks.
CoRR, abs/1905.11946.
Tan, M., Pang, R., and Le, Q. V. (2020). Efficientdet: Scal-
able and efficient object detection.
Torky, M. and Hassanein, A. E. (2020). Integrat-
ing blockchain and the internet of things in preci-
sion agriculture: Analysis, opportunities, and chal-
lenges. Computers and Electronics in Agriculture,
178:105476.
Vanti, G., Leshem, Y., and Masaphy, S. (2021). Resis-
tance response enhancement and reduction of botrytis
cinerea infection in strawberry fruit by morchella con-
ica mycelial extract. Postharvest Biology and Technol-
ogy, 175. cited By 0.
Wang, L., Fan, X., Chen, J., Cheng, J., Tan, J., and Ma, X.
(2020). 3d object detection based on sparse convolu-
tion neural network and feature fusion for autonomous
driving in smart cities. Sustainable Cities and Society,
54:102002.
Wu, X., Sahoo, D., and Hoi, S. C. (2020). Recent advances
in deep learning for object detection. Neurocomput-
ing.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
544
