
Video-based Car Make, Model and Year Recognition
Diana Atef George
1
, Omar M. Shehata
1
, Hossam E. Abd El Munim
2
and Sherif Hammad
1
1
Mechatronics Engineering Department, Faculty of Engineering, Ain Shams University, Cairo, Egypt
2
Computer and Systems Engineering Department, Faculty of Engineering, Ain Shams University, Cairo, Egypt
Keywords:
Fine-grained Car Recognition, CNN, Tracking, Detecting.
Abstract:
Fine-grained car recognition requires extracting discriminating features and certain car parts which can be
used to distinguish between similar cars. This paper represents a full system for car make, model and year
recognition in videos. We followed a multi-step approach for automatically detecting, tracking and recognizing
them using deep Convolutional Neural Network (CNN). We also focused on the recognition stage where we
managed to compare 4 state-of-the art Convolution Neural Networks and adapted them for extracting those
features. Moreover, we modified the InceptionResnetv2 network and our results show our success as we
managed to elevate the Top 1 accuracy to 0.8617 and Top 5 accuracy to 0.9751.
1 INTRODUCTION
Machine learning has been widely used in many ap-
plications including medical diagnosis, treatment and
prognosis. Moreover, it is used in natural language
processing, speech recognition, recommendation sys-
tems, facial recognition and fraud detection. For-
tunately, with the advancements in deep learning it
has been possible to mimic the human brain and
even surpassing the human accuracy. However, it
is still extremely challenging when it comes to fine-
grained classification. As, it is somehow difficult for
a machine to learn discriminative features and distin-
guish between similar classes.Therefore, there is al-
ways an attempt to use deep learning in such appli-
cations for automatically learning those specific fea-
tures. Fine-grained classification include discrimi-
nating birds(Gavali and Banu, 2020),flowers(Nguyen
et al., 2016) ,cars(Liu and Wang, 2017)and many
more.
Certainly, car classification in videos is consid-
ered a tremendously significant task and is required
for critical applications such as intelligent transporta-
tion systems for traffic and car crash analysis. How-
ever, the accuracy of the models in such applications
is still not high enough to be deployed in the real
world. As, it includes many challenges including tiny
changes between different car models, changes in il-
lumination conditions and occlusions which make the
task even harder. Although it is a complex task, it is
made up of mainly three stages: car detection, track-
ing and recognition.
For object detection there are many algorithms
that could be used such as a sliding window but
it is slow and not used in real time detection. To
speed up the process R-CNN (Girshick et al., 2015),
faster RCNN (Ren et al., 2015) and single shot Multi-
Box(Liu et al., 2016) are used instead. Yolov3 (Red-
mon and Farhadi, 2018) is considered the best when
it comes to real-time object detection. As proved by
Bilel, et al(Benjdira et al., 2019) YOLOv3 is better
than Faster RNN and only took on average 0.057ms
to process an image while Faster RNN took 1.39s.
For car classification, Fomin, et al (Fomin et al.,
2020) combined the car classification algorithm with
car position as viewed from the camera achieving a
precision of 92 % on CompCars dataset (Yang et al.,
2015) using InceptionResnetv3, 98 % for car detec-
tion using YOLOv3 and 96% for car direction classi-
fication. Hu, Qichang, et al (Hu et al., 2017) used spa-
tially weighted pooling and achieved an accuracy of
93.1% using ResNet101-swp on Stanford cars dataset
(Krause et al., 2013) for car model detection , an accu-
racy of 97.6% on car model and an accuracy of 99.3%
on car make of CompCars dataset. Dehghan, Afshin,
et al (Dehghan et al., 2017) collected data and prepro-
cessed them using Sighthound Cloud API for aligning
labeled car to the center. They trained 2 Deep Neural
Networks , one for detecting car make and model and
the other for detecting color. They achieved an ac-
curacy of Top 1 93.6% on Stanford car dataset and a
Top 1 95.88% on CompCar dataset. Liu, et al (Liu
86
George, D., Shehata, O., El Munim, H. and Hammad, S.
Video-based Car Make, Model and Year Recognition.
DOI: 10.5220/0010649900003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 86-91
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and Wang, 2017) tried out different CNN models to
find the best architecture and achieved Top 1 accu-
racy of 80% and Top 5 accuracy of 95.1% on Stan-
ford cars dataset using GoogLeNet. Alsahafi, Yousef,
et al (Alsahafi et al., 2019) used SSD-CNN architec-
ture. A video of 25 fps was input to SSD300 for
object detection then they cropped the images and
passed them over to ResNet152 CNN for classifica-
tion achieving 76.18% accuracy as the SSD missed
some of the bounding boxes and some of the cars
were misclassified. For car model recognition of 107
classes Gao, Yongbin, et al (Gao and Lee, 2015) used
frame difference for localizing moving cars in videos
and the output binary image is then passed to a sym-
metry filter to detect frontal view of the car which is
then passed to a CNN. They achieved an accuracy of
88.4% for car recognition and 100% frontal view ac-
curacy.
In this research paper we introduce a whole sys-
tem for vehicle recognition in videos. We also com-
pare state-of-the-art CNNs to find the best architec-
ture. Moreover, we modified the InceptionResnetv2
network and succeeded in achieving a higher accu-
racy. The rest of the paper is divided as follows: First,
we provide an overall and detailed system description.
Then, we describe how we adapted and modified neu-
ral network models to solve such problem, dataset and
hardware used. Finally, there is a section for all the
experimental results, discussion, conclusion and fu-
ture work.
2 SYSTEM DESCRIPTION
The system is composed of 3 modules: Car detec-
tion,Tracking and Recognition modules as shown in
Fig. 1.
First, a video frame is passed to the car detection
module where all the cars that are in the frame are
detected and the bounding boxes are then passed to
the car tracking module.
The Tracking module is responsible for decid-
ing, for each car detected, whether to retrieve the car
model stored as it was previously classified or pass
it to the car recognition module to classify, save the
result and keep tracking it for the subsequent frames
until it disappears.
The Recognition module uses CNN to predict the
cars’ make, model and year.
2.1 Detection Module
We used YOLOv3 on a video stream of 25 FPS to ex-
tract the exact locations of the cars in video frames
and send their bounding boxes to the car tracking
module. Confidence of less than 0.85 was rejected.
YOLOv3 detection rate depends on the hardware it
is running on. On NVIDIA GTX 1660 TI YOLOv3
processed the images at around 15 FPS but on a Pas-
cal Titan X it processed images at 30 FPS.
2.2 Tracking Module
We first need to calculate the Maximum Distance
which will be used in tracking the cars so as to de-
cide whether to consider the car the same as that pre-
viously recognized in the previous frame or not using
equation 1 where the height and width of detection
from the previous frame are used for calculation.
Maximum Distance = 0.4 ∗
p
h
2
+ w
2
(1)
where:
h = height of detection from the previous frame
w = width of detection from the previous frame
The Tracking module calculates the euclidean dis-
tance between the centroid of the bounding boxes de-
tected by Yolov3 and the previously stored ones to
decide whether the car was previously recognized or
not. If the euclidean distance is less than the Maxi-
mum Distance calculated, then it is the same car; thus
retrieving previously stored classification. if not, then
the module uses the bounding box to crop the car and
resize it to 300 × 300 pixels for the recognition mod-
ule to be able to classify the car and then store the
recognition output. The module also checks if any
car has disappeared by keeping track of unassociated
stored centroid.If it was kept unassociated for more
than 15 frames then it should be removed from the
stored centroids as the object has already disappeared.
We modified the simple tracking algorithm developed
by (Rosebrock, 2018) to adapt it for tracking only the
cars class and recognize their make, model and year
as well. Tracking Algorithm is as shown in Algorithm
1 starting with the input frame from the video as an
input.
2.3 Recognition Module
In car recognition we initialized our networks us-
ing ImageNet weights as Transfer learning is vital to
speed up the learning process where the earlier lay-
ers extract almost the same features and then we fully
trained them using Stanford Cars dataset. We mod-
ified state-of-the-art networks and added a softmax
layer with 196 neurons for classifying multi-classes
present in the dataset. Furthermore, we modified the
Video-based Car Make, Model and Year Recognition
87
Car Detection
using Yolov3
Car Tracking
Module
Crop new Cars
and Resize
Recognition Module
Figure 1: System Block diagram which is composed of the Detection module for creating the bounding boxes, Tracking
module for tracking cars and the recognition module to use CNN for recognizing new unpredicted cars.
Algorithm 1: Cars Tracking Algorithm.
Input: Center of Bounding Boxes detected
by Yolov3
Output: Cars Recognized in Frame
1 Bounding Boxes detected: Calculate the
Euclidean Distance
2 if Distance < Max Distance then
3 Associate to previously recognized car
4 else
5 Crop and Send for Recognition
6 Strore Centroid and car recognized
7 Check Stored Centroid
8 if left unassociated then
9 Check Disappeared Counter
10 if Disappeared Counter < 15 then
11 Increment Disappeared Counter
12 else
13 Remove Centroid
14 goto Bounding Boxes detected
Inceptionresnet network by adding a dense layer of
1024 neurons before the softmax layer for improving
the accuracy. We modified and tested the following :
• InceptionResNetV2(Szegedy et al., 2016a) is
made up of 164 layers and is a combination of
inception architecture along with residual connec-
tions. Modification is as shown in Fig. 2 with the
dense layer added before the softmax.
• Inceptionv3(Szegedy et al., 2016b) is made up of
42 layers deep which aims to reduce the number
of parameters for reducing the probability of over-
fitting while not affecting the efficiency of the net-
work. We modified it by adding a softmax layer
of 196 neurons to classify 196 car classes.
• MobileNetV2(Sandler et al., 2018) was also de-
veloped in an attempt to reduce the number of pa-
rameters without affecting the accuracy of the net-
work. We modified it by adding a softmax layer
of 196 neurons to classify 196 car classes.
• Resnet50(He et al., 2016) was mainly targeting
the vanishing gradient problem which arises in
very deep neural networks making them difficult
to train so they stacked residual blocks together
instead of using a plain network. We modified it
by adding a softmax layer of 196 neurons to clas-
sify 196 car classes.
3 DATASET, HARDWARE USED
AND IMAGE PREPROCESSING
We used Stanford car dataset (Krause et al., 2013)
which was released in 2013 and is made up of 196
classes containing a collection of 16,185 car images
taken from different angles, resolution and illumina-
tion defining their make, model and year as well as
their bounding boxes. We used 8144 images for train-
ing, 4020 for validation and 4021 for testing.
NVIDIA TESLA P100 GPU was used due to its
high speed in neural network training.
The bounding boxes provided were used to crop
the images and then we resized them to 300 × 300
pixels for training and testing. We sheared, zoomed,
rotated and flipped the cars horizontally as data Aug-
mentation is required to avoid overfitting.Training
data was normalized to have a mean of zero and a
variance of one to speed up the learning process.
4 EXPERIMENTAL RESULTS
4.1 Training and Testing Results
First, We conducted 5 experiments to find out the best
architecture and to test our modified Inceptionres-
netv2 with the dense layer added. We set the learning
rate to 0.0001, used adam optimizer and early stop-
ping to avoid overfitting. As shown in Table 1, Table
2, Fig. 3 and Fig. 4 our modified Inceptionresnetv2
can extract the discriminating features in cars achiev-
ing a higher accuracy without overfitting the training
dataset due to the presence of a dense layer and using
L2 regularization.
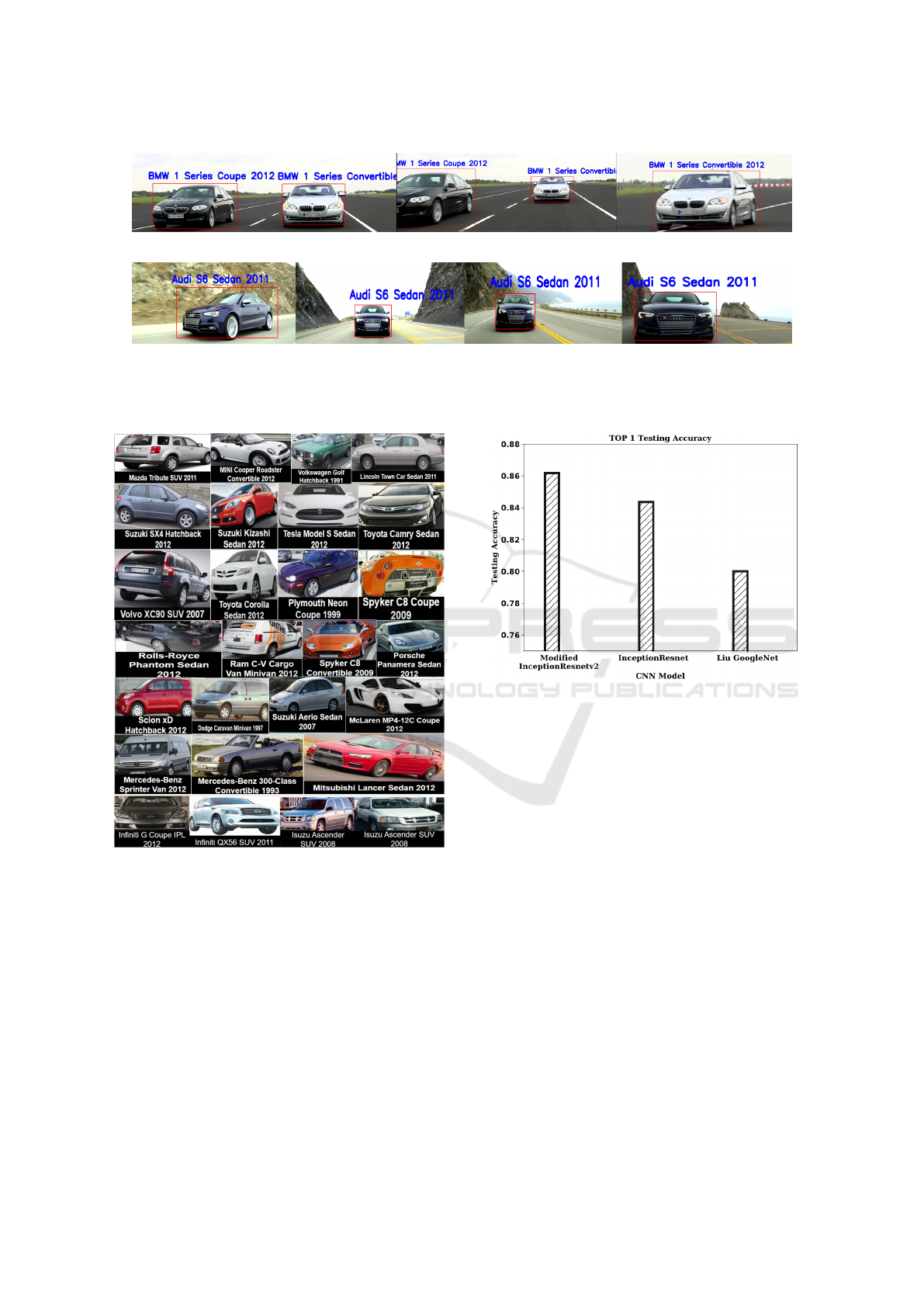
Then, we performed experiments with state-of-
the-art InceptionResnet and our modified Inception-
Resnet trained for 50 epochs. Our modified net-
work outperforms Top 1 accuracy achieved by state-
of-the-art InceptionResnet and increased by 2 % . We
also outperform Liu, et al’s Googlenet(Liu and Wang,
2017)by 6 % as shown in Table 3 and Fig. 6.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
88

Input (300 × 300 pixels × 3)
Stem
InceptionResNet-A (×5)
Reduction-A
Inception ResNet-B (×10)
Reductiont-B
Inception ResNet-C (×5)Average Pooling
Flatten
Relu (1024)Softmax (196)
Figure 2: Our Modified InceptionResnetv2 with a fully connected layer of 1024 neurons added before the softmax layer of
196 neurons to classify the 196 car classes present in the dataset.
Table 1: Make, Model & Year Top 1 Accuracy using different CNN showing our modified Inceptionresnetv2 outperforming
the other networks achieving higher validation accuracy.
Model Epochs Train. Acc. Valid. Acc.
1.InceptionResnetv2 14 0.8001 0.7423
2.Inceptionv3 18 0.8152 0.7229
3.MobileNetv2 10 0.5156 0.3694
4.Resnet50 19 0.6787 0.4898
5.Modified-InceptionResnetv2 18 0.7744 0.7652
Table 2: Make, Model & Year Top 5 Accuracy using different CNN showing our modified Inceptionresnetv2 outperforming
the other networks achieving higher validation accuracy.
Model Epochs Train. Acc. Valid. Acc.
1.InceptionResnetv2 14 0.931 0.946
2.Inceptionv3 13 0.944 0.929
3.MobileNetv2 10 0.887 0.839
4.Resnet50 19 0.876 0.716
5.Modified-InceptionResnetv2 18 0.943 0.952
Table 3: Comparison between Top 1 and Top 5 Testing accuracy (Acc.) of different CNN models, with our model trained for
50 epochs.
Model Top 1 Acc. Top 5 Acc.
1.Modified-InceptionResnetv2 0.8617 0.9751
2.InceptionResnet 0.8436 0.9744
3.Liu GoogleNet(Liu and Wang, 2017) 0.8000 0.9510
Figure 3: Top 1 Validation Accuracy Comparison between
different Neural Networks with Adam optimizer and Early
stopping.
Figure 4: Top 5 Validation Accuracy Comparison between
different neural network architectures used.
Video-based Car Make, Model and Year Recognition
89
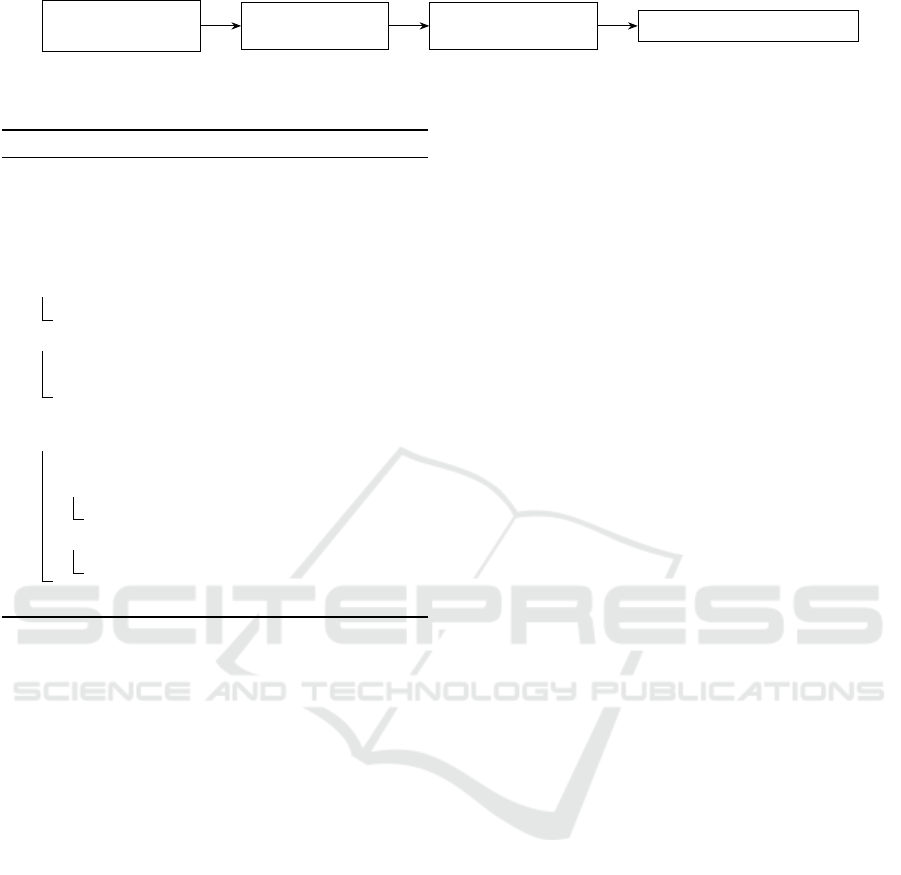
(a) Consecutive Frames from BMW car video
(b) Consecutive Frames from Audi car video
Figure 7: Consecutive Frames from different car videos using our Tracking and Modified-InceptionResnetv2 recognition
model.
Figure 5: A sample of Cars Make, Model and Year correctly
Recognized using our modified InceptionResnet.
4.2 Testing on Images and Videos
We tested our model using car images with different
poses and illumination as shown in Fig. 5.
Also, we tested it on different videos as shown in
Fig. 7. To evaluate our performance on the videos,
we first created the ground truth of the cars’ bound-
ing boxes using the MATLAB Ground Truth Labeler
App. This was used to output the coordinates of the
bounding boxes around the cars which were then used
to be compared with that predicted by our model. Av-
erage IoU was used as our evaluation metric which is
Figure 6: Top 1 Testing Accuracy Comparison between dif-
ferent neural network architectures with our model outper-
forming other networks.
the area of intersection over union between the ground
truth and the model prediction. Our model managed
to achieve an average IoU of 0.7 which is considered
to be good enough to predict the approximate position
of the cars in the videos.
5 CONCLUSION AND FUTURE
WORK
Fine-grained car recognition in video is a complex
task but can be subdivided into 3 tasks: Detection,
Tracking and Recognition. In our paper we focused
on comparing and representing the best CNNs which
can be used by others to solve such an extremely im-
portant problem and with our network architecture
modification we managed to significantly elevate the
accuracy as represented in the paper.
For recognition, InceptionResnetv2 and Incep-
tionv3 are better than Resnet50, MobileNetv2 neu-
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
90

ral networks in fine-grained classification applications
as they contain more number of layers with more
number of trainable parameters which the model can
use for learning discriminative features allowing it to
distinguish between similar classes. Also, adding a
dense layer to the InceptionResnetv2 allows for more
features to be extracted while using L2 regularization
to prevent overfitting the training dataset.
Our future work will include training and evalu-
ating our models using (Buzzelli and Segantin, 2021)
dataset to provide us with a larger and a broader set of
annotations than the Stanford car dataset as it includes
Type-level annotations for all CompCars models.
REFERENCES
Alsahafi, Y., Lemmond, D., Ventura, J., and Boult, T.
(2019). Carvideos: A novel dataset for fine-grained
car classification in videos. In 16th International Con-
ference on Information Technology-New Generations
(ITNG 2019), pages 457–464. Springer.
Benjdira, B., Khursheed, T., Koubaa, A., Ammar, A., and
Ouni, K. (2019). Car detection using unmanned
aerial vehicles: Comparison between faster r-cnn and
yolov3. In 2019 1st International Conference on
Unmanned Vehicle Systems-Oman (UVS), pages 1–6.
IEEE.
Buzzelli, M. and Segantin, L. (2021). Revisiting the com-
pcars dataset for hierarchical car classification: New
annotations, experiments, and results. Sensors, 21(2).
Dehghan, A., Masood, S. Z., Shu, G., Ortiz, E., et al.
(2017). View independent vehicle make, model and
color recognition using convolutional neural network.
arXiv preprint arXiv:1702.01721.
Fomin, I., Nenahov, I., and Bakhshiev, A. (2020). Hierar-
chical system for car make and model recognition on
image using neural networks. In 2020 International
Conference on Industrial Engineering, Applications
and Manufacturing (ICIEAM), pages 1–6. IEEE.
Gao, Y. and Lee, H. J. (2015). Vehicle make recognition
based on convolutional neural network. In 2015 2nd
International Conference on Information Science and
Security (ICISS), pages 1–4. IEEE.
Gavali, P. and Banu, J. S. (2020). Bird species identification
using deep learning on gpu platform. In 2020 Interna-
tional Conference on Emerging Trends in Information
Technology and Engineering (ic-ETITE), pages 1–6.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2015).
Region-based convolutional networks for accurate ob-
ject detection and segmentation. IEEE transactions on
pattern analysis and machine intelligence, 38(1):142–
158.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hu, Q., Wang, H., Li, T., and Shen, C. (2017). Deep cnns
with spatially weighted pooling for fine-grained car
recognition. IEEE Transactions on Intelligent Trans-
portation Systems, 18(11):3147–3156.
Krause, J., Stark, M., Deng, J., and Fei-Fei, L. (2013). 3d
object representations for fine-grained categorization.
In Proceedings of the IEEE international conference
on computer vision workshops, pages 554–561.
Liu, D. and Wang, Y. (2017). Monza: image classification
of vehicle make and model using convolutional neural
networks and transfer learning.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Nguyen, N., Le, V., Le, T., Hai, V., Pantuwong, N., and
Yagi, Y. (2016). Flower species identification using
deep convolutional neural networks.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Rosebrock, A. (2018). Simple object tracking with opencv.
In Online.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
als and linear bottlenecks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4510–4520.
Szegedy, C., Ioffe, S., Vanhoucke, V., and Alemi, A.
(2016a). Inception-v4, inception-resnet and the im-
pact of residual connections on learning. arXiv
preprint arXiv:1602.07261.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016b). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2818–2826.
Yang, L., Luo, P., Change Loy, C., and Tang, X. (2015).
A large-scale car dataset for fine-grained categoriza-
tion and verification. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3973–3981.
Video-based Car Make, Model and Year Recognition
91
