
Use of a Virtual Twin for Dynamic Storage Space Monitoring in a
Port Terminal
Andreas Höpfner, Olaf Poenicke, Christian Blobner and André Winge
Fraunhofer IFF, Sandtorstr. 22, 39106 Magdeburg, Germany
Keywords: Virtual Twin, VR Port Model, LiDAR 3D Data, IoT, Port of the Future.
Abstract: The paper describes research and development for dynamic 3D models and Virtual Reality (VR) applications
in the context of port processes. The work described is carried out in the currently ongoing EU-funded project
PortForward. The paper addresses the use of VR technologies in the context of industrial applications and
describes how dynamic sensor data can be integrated into a 3D model of a Port. In addition to tracking data
of moving assets, the sensor data mainly comprises 3D measurement data from LiDAR sensors. These sensors
are installed in the port infrastructure to automatically record the current occupancy status of storage areas.
The measurement data from the LiDAR sensors are dynamically integrated into the VR model in an abstracted
form together process related meta-data to reflect the current process status in the port terminal. Based on that
approach in the sense of a Virtual Twin, process flows and storage space management can be optimized. The
use of VR technologies is crucial in this context in order to depict the complex spatial and dynamic process
situation in an intuitive way.
1 INTRODUCTION
Digitization and Industry 4.0 are buzzwords that pose
new challenges for companies and infrastructure
operators. The ability to process and store digital data
and to make decisions on the basis of digital data is
becoming an elementary component of companies to
ensure their competitiveness. This is all the more
important in logistics, which operates at the hubs of
the economy.
In the course of digitization, ports are faced with
the challenge of intuitively and perceptibly mapping
a wide variety of data and information on widely
distributed infrastructures, superstructures, operating
resources as well as freight and stored goods in an
integrated form. The PortForward project (2018-
2021), which is funded by the EU Commission within
the framework of Horizon 2020 and its specific pro-
gram Port of the Future, addresses these points and
challenges with regard to the digitization of port
infrastructure. The Fraunhofer IFF leads the project
and works with twelve European partners to develop
solutions and technologies for small and medium-
sized ports in Europe.
In the PortForward project, the IFF relies
primarily on its long-standing cooperation with the
Port of Magdeburg, which is the biggest inland port
in central Germany with an annual handling volume
of about four million tons. Here, preliminary projects
have already produced virtual models of the port area
for strategic infrastructure planning. Against this
background, the Fraunhofer IFF is developing a so-
called Virtual Twin (Adler and Masik, 2020) of the
Magdeburg inland port as part of PortForward in
order to integrate real-time information and
interaction possibilities into the virtual model.
A central use case in the project focussing on the
consistent use of 3D data is the so-called Dynamic
Storage Space Monitoring. For this purpose, an
approach is being developed that links the spatial
model of a port terminal with the dynamic
movements of logistics objects and the changing
space occupancy states. These are automatically and
cyclically recorded by LiDAR sensors integrated into
the port infrastructure. Thus real-time information
about the occupancy status of dedicated storage areas
and the shapes of stored objects will be available in
the Virtual Twin model to enable efficient yard
management for a multi-purpose use terminal.
Section 2 of the paper describes the Virtual Twin
of the port that is used as a basis for the use case.
Based on a static 3D model initially developed, it is
briefly described how information from sensor
sources are integrated to generate a dynamic 3D
model.
116
Höpfner, A., Poenicke, O., Blobner, C. and Winge, A.
Use of a Virtual Twin for Dynamic Storage Space Monitoring in a Port Terminal.
DOI: 10.5220/0010676800003062
In Proceedings of the 2nd International Conference on Innovative Intelligent Industrial Production and Logistics (IN4PL 2021), pages 116-122
ISBN: 978-989-758-535-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Section 3 gives an overview on the specific
requirements in the use case in a multi-purpose use
terminal and describes the overall approach for the
development of the Dynamic Storage Space
Monitoring.
In section 4 the approach for 3D data capture
based on LiDAR sensors is described. The paper
closes with a short summary and outlook in section
5.
2 VIRTUAL TWIN OF THE PORT
2.1 Objectives and Vision
The Virtual Twin approach is based on the concept of
the Digital Twin, which was first introduced in 2010
(Shafto et al., 2010). With the advent of new and
powerful Virtual Reality (VR) technologies, the focus
of this concept is also shifting to the virtual and
interactive representations of Digital Twin solutions
(see Schroeder et al., 2016).
The Fraunhofer IFF creates Virtual Twin
solutions by integrating different system models. For
example, Höpfner et al. describe the combination of a
spatial model with an energy model in a VR
application for strategic decision making in industrial
parks (Hoepfner et al., 2017). For the application in
the port environment, the focus is on the combination
of the spatial model with a logistics model of the port
to enable tactical and operational decision support for
the management of port processes. To allow
operational support, real-time information from the
physical port environment need to be integrated into
the 3D model – thus, making it a dynamic 3D model.
This dynamic Virtual Twin is also used for other use
cases along the Dynamic Storage Space Monitoring
within the project PortForward.
The use of 3D models and corresponding VR user
interfaces is seen as a central possibility to intuitively
display complex processes and states in their spatial
and partly also temporal context. In general, the
intuitive grasp of complex information and
knowledge transfer are seen as central advantages of
employing VR and AR solutions (see Adler and
Masik, 2020 and Reder, 2019). In addition, the
consistent use of 3D models in different life cycle
phases from planning to operational use in terms of
Digital Engineering opens up significant efficiency
potentials (Adler et al., 2015).
2.2 Development of the Basic Static
Model
As a basis for the dynamic Virtual Twin a static 3D
model of the Port of Magdeburg was generated using
basic geo data (digital terrain model DGM02 and
digital ortho photos DOP20) from the State Office for
Surveying and Geoinformatics LVermGeo Saxony-
Anhalt. The special requirements of the later model
application made further processing of this model
necessary. The resulting terrain geometry of the
previously regular DGM02 was transferred into a
volume and performance optimized irregular
triangular network TIN (Triangulated Irregular
Network). The terminal areas of the Port of
Magdeburg were manually integrated on the basis of
digital plans. Port infrastructure, such as quay walls
and locks, were integrated into the terrain model
using as-built plans of the Port of Magdeburg and on-
site photographs. Selected LoD 02 buildings of
special relevance were modeled with façade textures
(see figure 1). The result was a virtual 3D terrain
model of the Port of Magdeburg, which is suitable for
interactive work in real time.
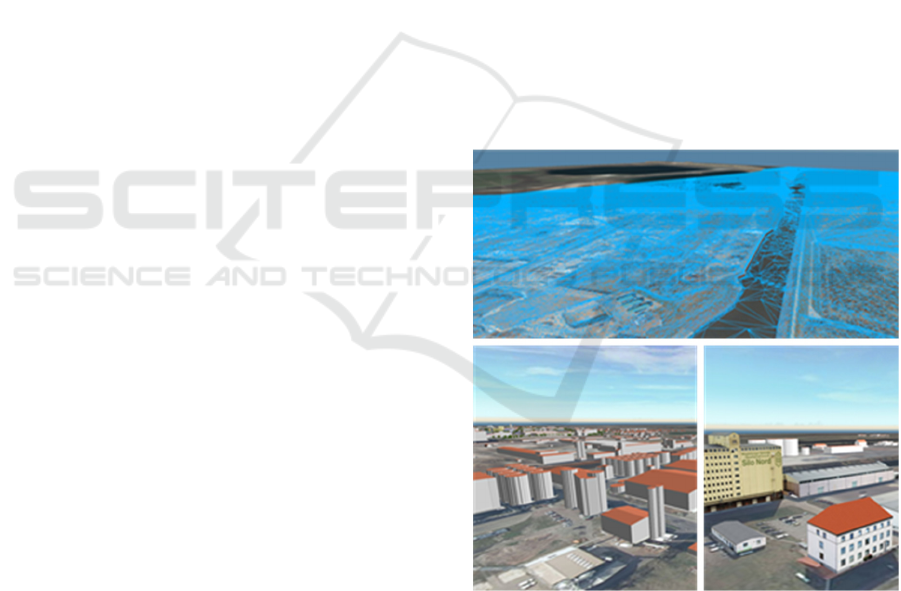
Figure 1: 3D Terrain model TIN geometries (top); 3D
building models with LoD 2 (down-left); relevant buildings
with façade textures (down-right).
In a final modelling step, cityscape-defining
vegetation and secondary objects were manually
integrated into the virtual model using a 3D object
library. As shown in Figure 2, this also includes
logistics-related objects such as handling equipment
Use of a Virtual Twin for Dynamic Storage Space Monitoring in a Port Terminal
117
(e.g. cranes) or stored goods (e.g. ISO containers,
machinery components).
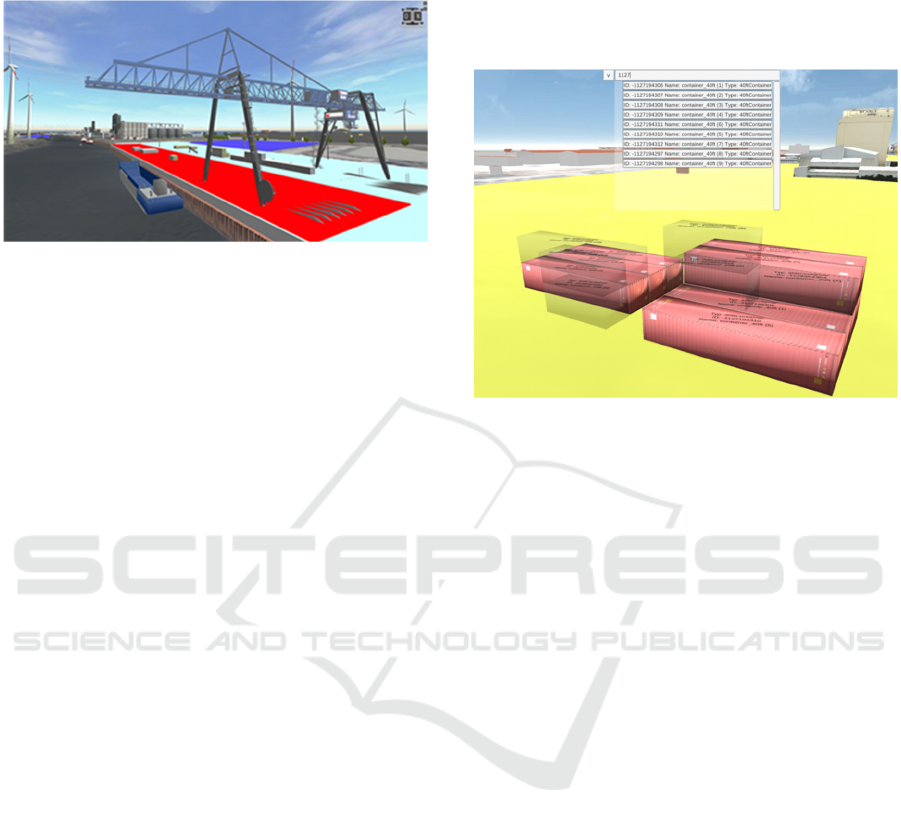
Figure 2: 3D model of the Hanse-Terminal with logistics
objects and marking of areas with different storage purpose
(right).
As also shown in Figure 2, individual sub-areas
are differentiated as these offer different capabilities
for handling and storage of goods (e.g. in terms of
loads and storage capacity or regulations for storable
types of goods). With such meta information assigned
to storage areas, the model is currently already used
operationally by the port for the administration of
storage area permits.
2.3 Development of the Dynamic Model
To establish a dynamic real-time model, additional
object information provided by heterogeneous
software systems are necessary. Collecting these
information via different special interfaces to the
software systems are not effective. Therefore, an
approach of using standard interface technologies and
protocols, like RESTful API and MQTT was
developed. In context to the Use Case of Dynamic
Storage Space Monitoring, as described in section 3,
an interface definition was developed that allows
classified logistic objects (containers, storage goods
etc.) and its meta-information to be defined and
transferred. In order to map these additional
information on objects in the 3D overall model, all
classified objects need a unique identifier. In addition,
an initial alignment of the coordinate systems
between the model world and reality must be
performed, e.g. to determine the reference point for
positioning the objects.
There are different strategies to update the virtual
model. On the one hand, the 3D model is able to pull
new information periodically. But this is not always
performant. On the other hand it is possible to trigger
the virtual model when information are provided. The
first prototype was implemented using an MQTT
based publish-subscribe mechanism. With a central
broker several input sources can be connected to the
3D model. The model itself fetches the relevant
dynamic object data referring to the currently used
features of the Virtual Twin (e.g. only fetch container
related data).
Figure 3: 3D model prototype with on-click annotations of
container data and search function.
The project uses different visualization
technologies to display the meta-information in the
scene. For example, status information such as
incoming logistics objects are coloured green. Other
information such as cargo number, content, sensor
data (temperature, humidity) etc. can be visualized as
on-click annotation on the objects. The developed
prototype of the dynamic 3D model also provides
features for searching objects – e.g. container by
container ID (figure 3).
The main advantage of using this dynamic real-
time model is the compact, clear, object-based
representation of meta-information from different
software systems in one scene.
3 DYNAMIC STORAGE SPACE
MONITORING
3.1 Use Case Requirements
In the Port of Magdeburg, individual port terminals
are used for the handling and storage of a wide variety
of goods (e.g. mixed use with palletised goods,
containers, heavy goods, etc.). As a result, it is not
possible to define fixed storage locations and mark
them in the terminal area, as is done, for example, in
pure container terminals with marking of storage
aisles and locations. This of course results in a high
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
118
complexity for documentation of storage locations
and high efforts for the yard management.
To enable a more efficient yard management a use
case was developed to implement and test a Dynamic
Storage Space Monitoring. The requirements towards
this use case were:
• to develop a technical approach to
automatically capture the position of stored
goods (without technical devices attached to
the goods) and
• to integrate the good’s information (meta
data and actual storage location) into the 3D
model of the Virtual Twin
Based on these requirements a technical approach
was developed, is currently implemented and will be
tested in a dedicated terminal of the port.
3.2 Approach of the Virtual Storage
Location Grid and Data Capture
To make use of the Virtual Twin the approach for a
Virtual Storage Location Grid was developed, based
on the spatial model of the port. With a grid
dimension of 2x2 meters, stored goods can be
assigned to individual virtual storage locations. Thus
occupied storage locations can be marked in the
dynamic 3D model (see figure 4).
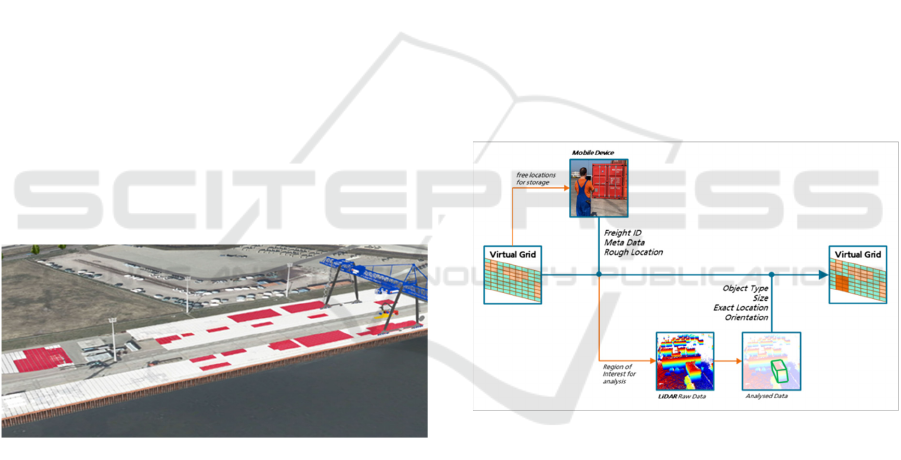
Figure 4: 3D model of the Hanse-Terminal with Virtual
Storage Location Grid (occupied locations marked red).
This assignment requires the acquisition of
information about the goods and their location during
storage. In the project, this recording of meta data
shall be carried out with mobile devices with an
integrated GPS. For a dynamic storage space
management, however, this GPS-based position
acquisition is too imprecise, as there is always an
offset between the mobile device used by personnel
and the stored good itself.
In the focused Hanse-Terminal of the Port of
Magdeburg, a camera infrastructure for research
purposes already exists with which a so-called Virtual
Bird Eye View (Borstell et al., 2012) can be
generated. Based on differential image analyses, this
allows to record the occupancy of the individual
storage location grids. However, this camera based
capturing is only giving 2D images and no 3D
information to be integrated into the Virtual Twin.
In order to obtain 3D information on the current
occupancy of storage spaces for the Virtual Twin, the
project is working on an expansion of the sensor
infrastructure. Using LiDAR sensors installed in the
Hanse-Terminal, real contours can be recorded and
integrated into the 3D model of the port in an
abstracted form. Figure 5 summarizes the concept of
the Virtual Storage Location Grid and its status
changes based on sensor data and provided meta data
of stored freight.
The occupancy of individual grid locations shall
be detected by LiDAR sensors and a referring
processing of the sensor data. Based on the current
occupancy, it is thus possible to check where a
sufficiently large free storage area is available in the
terminal for a new cargo to be stored. During storage,
the identification of the freight and the metadata of
the freight are to be entered on site via a mobile
device (e.g. tablet computer).
Figure 5: Concept for the Dynamic Storage Space
Monitoring using a Virtual Grid.
In this way, the storage can be roughly localized
via GPS. Once the storage has been confirmed, the
data from the LiDAR system are be used to check
whether there has been a corresponding change in the
space allocation. Based on the size and position and
orientation of the novel detected object the position
of the stored freight can be corrected and the status of
the correspondingly occupied grid areas is changed in
the Virtual Storage Location Grid.
Use of a Virtual Twin for Dynamic Storage Space Monitoring in a Port Terminal
119

4 DATA CAPTURE IN BIGGER
YARDS
4.1 Related Work
The central aspect described in this paper is the
development of a novel approach for continuous
recording of 3D information in a logistics specific
environment using LiDAR sensors.
A classic approach of scanning 3D contours in
port environments is the use of industrial line lasers
(see Chun et al., 2004). Today there are also
commercial solutions and applications available to
automatically scan container stacks in automated or
semi-automated terminals (e.g. LASE, 2021). They
are creating the 3D information only in connection
with the movement of cranes – thus other handling
operations (e.g. freight handled by forklifts or
reachstackers) are not directly captured. Newly stored
freight is only scanned “by chance”. For that reason
such solutions are not suitable for the specific
requirements of a multi-purpose terminal as described
above.
Other fields of research and development are
focussing on continuous scanning of storage yards
with regard to the storage of bulk material (see Ou et
al., 2012). But these approaches using
videogrammetry and projector-contour scanning also
rely on moveable sensor infrastructure.
Based on the specific experience with the Virtual
Bird Eye View in the Hanse-Terminal of the Port of
Magdeburg, the focus for a sensing solution was
again laid on fixed sensor positions. For the purpose
of the use cases described above, LiDAR sensors
were identified as the most suitable sensor type to
continuously generate 3D information of a wide area
with no requirement of additional sensor movement.
4.2 Data Capture using LiDAR Sensors
Light Detection and Ranging (LiDAR) sensors
belong to the group of time-of-flight sensors that
determine distances by emitting light and measure
distances by measuring the time of flight of light
reflected from surfaces back to the sensor. Because
the LiDAR sensor emits a laser beam in a previously
known direction, it is possible to determine a 3D
coordinate in space relative to the position of the
sensor. Over time, this results in 3D point clouds that
can be used to create spatial images and to detect and
localize movements. LiDAR sensors are mainly used
in the context of autonomous driving because they
offer high reading ranges of >>100m and provide the
3D data comparatively quickly. First models are
available on the market even in the low-cost range of
<1,000€, which opens up new fields of application.
For the target application described above, the
MID-40 model available from the company Livox
offers a very good price-performance ratio. The
performance parameters analysed by Ortiz Arteaga et
al. show a very high accuracy of the sensor at ranges
up to more than 200m (compare Ortiz et al., 2019).
The special feature of the sensor is a non-repetitive
scanning pattern, which allows a higher coverage of
the Field of View (FOV) compared to line-based
LiDAR sensors (Livox, 2021a), which is especially
useful for the acquisition of 3D objects in port
terminals over a longer integration time.
Given the possibilities to install such sensors on
the light posts in the Hanse-Terminal and the required
coverage of the dedicated storage area the MID-40
sensor will be complemented by another LiDAR
model of Livox, offering a wider field of view (Livox,
2021b). Figure 6 shows exemplary test images taken
with the MID-40 LiDAR sensor in the Hanse-
Terminal of the Port of Magdeburg.
Figure 6: Test recordings with MID-40 LiDAR sensor –
enriched with RGB data (left) and with height coding
(right).
On the basis of the generated point clouds,
standard shapes and sizes (e.g. for ISO containers or
swap bodies) can be classified using AI methods.
Fraunhofer IFF already developed AI based
methodologies to classify objects based on dynamic
point cloud data in other industrial contexts. For point
cloud segmentation, object detection and tracking and
object classification several AI methodologies are
described in the literature (see Guo et al., 2020). For
the use case several approaches can be evaluated now
with the sensor installations completed.
Abstracted information of classified objects in the
port environment will be directly integrated into the
3D model of the port. Freight and containers with
shapes that cannot be directly classified are
transferred using a bounding box. For the transfer of
data on object type, size, position and orientation
from the measuring system to the 3D model the
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
120
Machine2Machine communication protocol MQTT
will be used as described above in section 2.3.
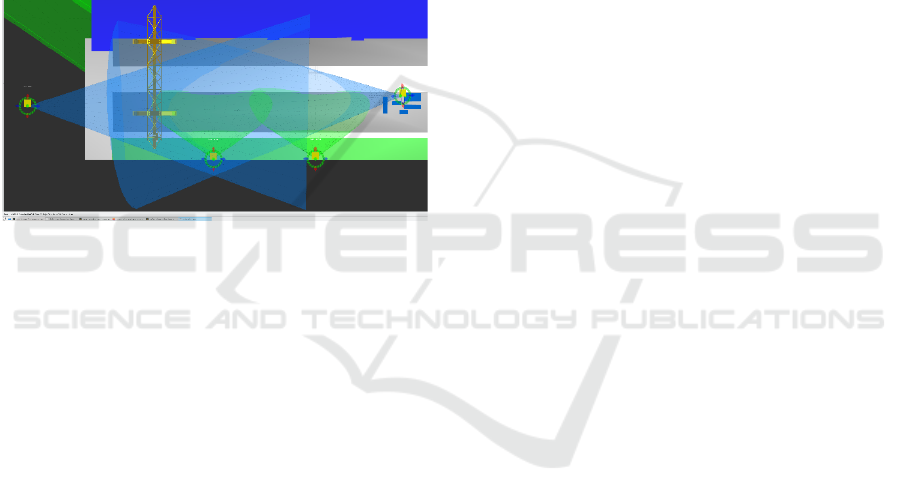
A simplified 3D model of the Hanse-Terminal is
furthermore used for planning the LiDAR
deployment. In particular, it can be used to check
which viewing and detection ranges are available for
the LiDAR sensors at different installation points and
orientations. Currently the pilot installation of
LiDAR sensors on the light posts in the Hanse-
Terminal was finalised. With that installation, a
defined storage area of approximately 2,000 m² is
covered. The installations were planned in such a way
that the storage area is detected from several sides to
be able to detect the stored objects from as many sides
as possible by matching the point clouds of the
individual LiDARs.
Figure 7: VR-based planning of sensor positions for the
dedicated storage area.
The VR-based planning of LiDAR positions
(figure 7) shows the potential for the consistent use of
3D models, since the 3D model data can be used both
for planning purposes and later for the operational use
of the sensor systems and corresponding evaluation
of the 3D measurement data. Furthermore the high
detail 3D model of the Virtual Twin can be used for a
sensor simulation of the LiDAR sensors to derive
synthetic 3D point clouds for virtual training of the
AI methods for object classification. After the
installation of the LiDAR sensors in the port
environment it will be evaluated whether such virtual
training can support the further development and
implementation of the object classification.
5 SUMMARY AND OUTLOOK
The PortForward project has so far developed the
technical concepts for several services, that can be
integrated into Virtual Twin applications. One of
these services is the Dynamic Storage Space
Monitoring based on real-time 3D information. The
use of the Virtual Storage Location Grid to document
the space occupancy at the Hanse-Terminal, which is
used for a wide variety of goods, can be used to tap
into potential for optimizing the management of the
storage areas. Furthermore, the use case shows the
potential of the underlying VR technologies for the
visualization and intuitive comprehension of complex
spatial and process relationships.
In the further course of the project, the technical
installations in the port will be carried out and the
functions for transferring the scan data into the 3D
model will be further developed and tested. On the
basis of a robust recording of the storage situation and
corresponding reproduction in the Virtual Twin,
targeted applications can subsequently be developed
which support the operative business, e.g. with regard
to storage area management or optimised storage
strategies.
ACKNOWLEDGEMENTS
The PortForward project is funded by the EU under
project number 769267 as part of the "Ports of the
Future" program: https://www.portforward-project.eu/
REFERENCES
Adler, S., Kernchen, A., Reipsch, T., Bayrhammer, E.,
Schmucker, U. (2015): Mobile Assistenzsysteme für
sicheren Betrieb und Wartung von Maschinen und
Anlagen. In: Gausemeier, J., Grafe, M., Meyer auf der
Heide, F. (eds.): Augmented & Virtual Reality in der
Produktentstehung, p 199. Hans Gieselmann Druck und
Medienhaus, Bielefeld.
Adler, S., Masik, S. (2020): Der digitale Zwilling für
virtuelle Fabrikplanung und -betrieb. In: Orsolits, H.,
Lackner, M. (eds.): Virtual Reality und Augmented
Reality in der Digitalen Produktion, pp. 191-215.
Springer Gabler.
Borstell, H., Plate, C., Richter, K. (2012): Virtuelle
Draufsicht für die bildbasierte Situationsanalyse.
Tagungsband InnoSecure 2012. VDE-Verlag, Berlin,
Offenbach.
Chun, T.-W., Kim K.-M., Lee, H.-G., Nho, E.-C. (2003):
Fast scanning method for container stacking profile
with one laser sensor. Industrial Electronics Society,
2003. IECON '03. The 29th Annual Conference of the
IEEE.
Guo, Y., Wang, H., Hu, Q., Liu, H., Liu, L., Bennamoun,
M. (2020): Deep Learning for 3D Point Clouds: A
Survey. IEEE Transactions on Pattern Analysis and
Machine Intelligence.
Hoepfner, A., Mencke, N., Lombardi, P., Franke, R.,
Komarnicki, P. (2017): A Virtual Reality Platform that
supports integrated Design of Energy and Land-Use
Use of a Virtual Twin for Dynamic Storage Space Monitoring in a Port Terminal
121

Plans in Brownfield Industrial Parks. The Seventh
International Symposium on Energy. Manchester.
LASE (2021): Automatic Yard Crane, https://lase-
solutions.com/products/ports/automatic-yard-crane/
last accessed 2021/06/22.
Livox Technology (2021a): MID-40 lidar sensor.
https://www.livoxtech.com/mid-40-and-mid-100, last
accessed 2021/06/22.
Livox Technology (2021b): Horizon lidar sensor.
https://www.livoxtech.com/horizon, last accessed
2020/07/04.
Ortiz Arteaga, A., Scott, D., Boehm, J. (2019): Initial
Investigation of a low-cost automotive LiDAR system.
In: The International Archives of the Photogrammetry,
Remote Sensing and Spatial Information Sciences,
Volume XLII-2/W17.
Ou, J., Zhou, J., Zhu, X., Yuan, Y., Shang, Y., Zhang, X.
(2012): Large stack-yard three-dimensional
measurement based on videogrammetry and projected-
contour scanning. In: Optical Engineering, 51(6).
Springer.
Reder, B. (2019): Vom Science-Fiction-Film in die Realität.
In: IDG Research Services (eds.): Studie Virtual
Reality/ Augmented Reality 2019, p 14. IDG Business
Media, München (2019).
Schroeder, G. N., Steinmetz, C., Pereira, C. E., Espindola,
D. B. (2016): Digital Twin Data Modeling with
Automation ML and a Communication Methodology for
Data Exchange. In: IFAC-PapersOnLine – Volume 49,
Issue 30 (pp. 12-17). Laxenburg, Austria: International
Federation of Automatic Control IFAC.
Shafto, M., Conroy, M. E. G., Kemp, C., Le Moigne, J.,
Wang, L. (2010): Draft modelling, simulation,
information technology & processing roadmap,
Technology Area 11. Washington, DC: National
Aeronautics and Space Administration.
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
122
