
Modern Light Sport Training Systems:
Critical Analysis of Their Construction and Performance Features
Anton Ezhov
1,2 a
, Anna Zakharova
1,2 b
and Dmitriy Kachalov
1,2,3 c
1
Ural Federal University named after the first President of Russia B. N. Yeltsin, 19 Mira street, Yekaterinburg, Russia
2
Hockey Academy Spartakovets, 31 Engelsa street, Yekaterinburg, Russia
3
Ural State University of Railway Transport, 66 Kolmogorova street, Yekaterinburg, Russia
Keywords: Coordination Training, Coordination Assessment, Sport Gadgets, Light Training System.
Abstract: Modern digital technologies help to provide the athlete progress in the majority of sport kinds. There are too
many sport gadgets intended for different training aims. So, assessment of their advantages or disadvantages
is difficult for a coach or other customers. The aim of our research was to provide a detailed comparison of
the light sport training systems available with the identification of the operation features. Methods. FitLight
TM
,
BlazePod and XLiGHT sport training systems were considered in terms of usability, features, performance
and diagnostic possibilities. It has been found that FitLight
TM
is more suitable for sport diagnostics. It should
be mentioned however that BlazePod and XLiGHT simulator are more affordable and can be high in demand
by coaches.
1 INTRODUCTION
The modern training process is unthinkable without
the use of multimedia support for sports. Over the
past ten years the qualitative approach to the
organization of sports training has fundamentally
changed in amateur and professional sport as well as
in sports reserves training in sports clubs and schools.
Thanks to the universal digitalization nowadays
plenty of devices of fixing and analyzing the training
process parameters are used everywhere. There are
heart rate monitors with GPS-navigation for
endurance athletes, force platforms and photo finish
(timing systems) for sprinters, video recording with
subsequent analysis of sport technique of exercises
performance, etc. Thus power, endurance and speed
are under super vision of information technologies.
Until recently coordination development was far
away from using support digital technologies. Taking
into account that it is coordination training that
requires novelty and unpredictability easily provided
by gadgets, the appearance of light sports systems
was predictable. Now such means of sport
multimedia support as the visual coordination
a
https://orcid.org/0000-0003-0541-0650
b
https://orcid.org/0000-0002-9550-1793
c
https://orcid.org/0000-0003-2857-9416
simulators or light sport systems are gaining
popularity in team and martial arts sports.
Light Sport Training System is a complex of
wireless lights coming on randomly or in a given
order by the control device and deactivated by user’s
touching them as fast as possible. It is designed
mainly for training of quick reaction and coordination
development in various sports. At the same time,
changing the Light Sport Training System settings
and exercise conditions allows you to design a
training session of any orientation. In addition, the
presence of a timing system and statistical processing
of the response speed allows you to objectively
control the level of development of coordination
abilities.
The first and thus named revolutionary light sport
system FitLight
TM
Trainer was officially introduced
in 2011 (FitLight manual, 2021). This simulator
(Figure 1) was invented by Canadian specialists and
assembled in China.
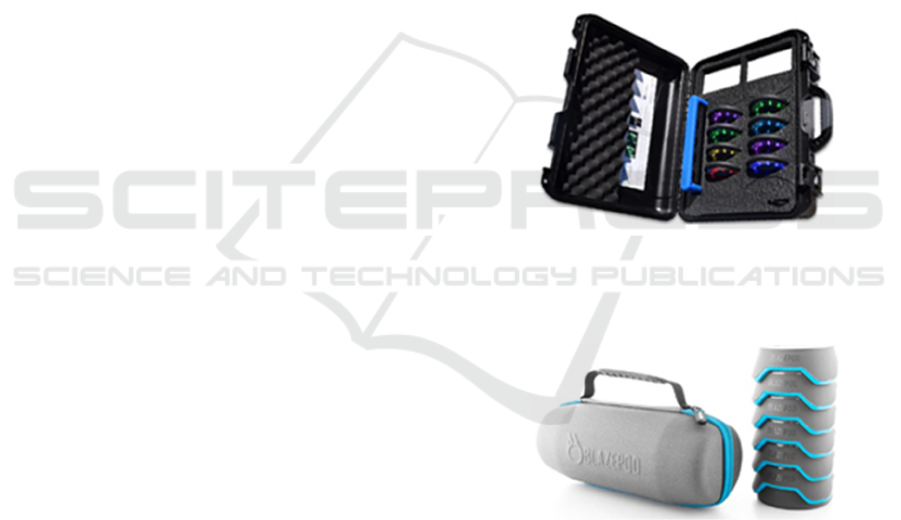
In March 2017 the Israeli company BlazePod
(BlazePod presentation, 2017) announced their brand
innovative system (Figure 2).
Ezhov, A., Zakharova, A. and Kachalov, D.
Modern Light Spor t Training Systems: Critical Analysis of Their Construction and Performance Features.
DOI: 10.5220/0010677900003059
In Proceedings of the 9th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2021), pages 123-129
ISBN: 978-989-758-539-5; ISSN: 2184-3201
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
123
The Russian company "Shaiber" introduced its
XLiGHT simulator (figure 3) in 2019. In fact, it is an
adaptation and localization (“whitelable”) of
Reaction Training Lamp (China).
Due to their availability and simplicity of
operation light simulators are confidently gaining the
market of sports training support products.
However, manuals of these Light Sport Training
Systems present directions for usage but do not
contain technical peculiar properties.
The aim of our research was to provide a detailed
comparison of the light sport training systems
available on the market with the identification of the
operation features.
2 METHODS
To provide the critical analysis of light sport systems
three main aspects were selected: size and price,
connection and operation features.
2.1 Size and Price
This section includes an analysis of the external
parameters of the device:
• Description of the delivery set, available
configurations and dimensions (physical data);
• Prices;
• Ergonomics of the product as a whole and the
sensors separately;
• Charging features;
• Accessories.
2.2 Connection Features
The analysis of the connection features of light sport
systems includes an analysis of the external
parameters of the device:
• Common features;
• Control devices;
• Limitations of the Bluetooth™ protocol;
• Software features, localization;
• Functional capabilities of sensor (signal-
response);
• Data upload, storage and synchronization.
2.3 Operation Features
Following details were under consideration in this
department:
• Using in training;
• Using for testing.
3 DISCUSSION
For the critical comparison of sport devices for
coordination development following light sport
systems were available: FitligtTrainer
TM
(FitLight
Sports Corp., Canada), Blazepod (Israel, Tailand) and
XLiGHT (Russia). All rights reserved.
3.1 Size and Price
3.1.1 Description of the Delivery Set,
Available Configurations and Overall
Dimensions
The FitLight Trainer™ is designed to be used as a
training aid for athletic conditioning. Official delivery
is possible in the following versions: 4, 8 and 24
sensors.
Figure 1: FitLight Trainer™ in case.
Blazepod are available in three standart options:
4, 6, and 8 sensors.
Figure 2: Blazepod 6 sensors version.
XLiGHT is available in a set of 6 and 8 sensors.
Similar sets of light sport systems with a
minimum and sufficient set of sensors (6-8 pcs.) with
the necessary equipment included in the delivery
package were selected for comparison (Table 1).
icSPORTS 2021 - 9th International Conference on Sport Sciences Research and Technology Support
124
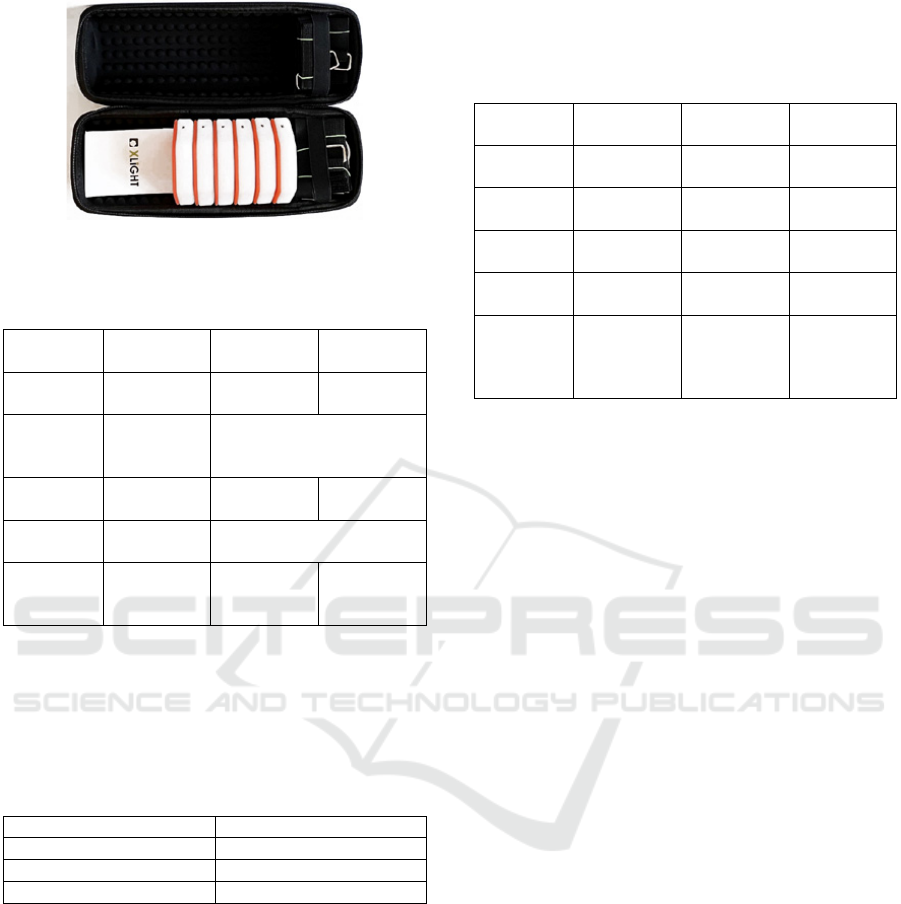
Figure 3: XLiGHT exterior of the opened set.
Table 1: Physical parameters and the content of sport
systems sets.
Device FitLight
Trainer™
Blazepod XLiGHT
Set
weight, kg
6,92 1,13 1,75
Case Carrying +
charging
case
Cylindrical case with
zipper
Case size 500x400x20
0
250x100x10
0
320x110x11
0
Control
device
Tablet PC
include
d
Any android or iOS
device
(
not included
)
Charging
devices
1 tablet+
1 for
sensors
Doc-station
+ USB
cable
USB- cable
3.1.2 Prices
The prices of Light Sport Systems (Table 2) are
official and were obtained via a request of distributors
in Russia in 2021.
Table 2: The price of 6-8 sensors version.
Device Price, USD
FitLight 5367
Blazepo
d
522
XLiGHT 349
3.1.3 Ergonomics of the Product
Each of the presented light sport training devices has
a hard case or a box with a carrying handle.
The FitLight
TM
sensors have a cosmic disk shape,
each located in an individual cell made of foamed
polyethylene, which also serves as a charging port.
The Blazepod sensors are cone-shaped, arranged
in a trunk one behind the other, slightly recessed one
into the other.
XLiGHT sensors have a 6-angle shape, located in
the case one after the other.
All presented sensors are moisture and dust
protected, thus allowing the usage of gadgets in open
air, even in conditions of high humidity, including
rain and snow (Table 3).
Table 3: Physical parameters of sensors.
Device
FitLight
Trainer™
Blazepod XLiGHT
Sensor
weight,
k
g
0,252 0,130 0,150
Sensor
lenght, m
m
125 100 95
Sensor
width, m
m
125 100 85
Sensor
hei
g
ht, m
m
45 42 20
Sensor
water
resistance
class
IP65 IP65 IP65
3.1.4 Charging Features
Each of the simulators under consideration has an
individual battery in its sensors with the possibility of
recharging.
FitLight sensors equipped with NiMH 850 mAh
battery The battery is replaceable, additional batteries
are not included in the delivery package. Charging is
carried out only with a standard 110-240 V ас
charger, which is a carrying case. Charging is
possible only in the opened case. To charge the
battery the sensor is placed in the individual cell
(socket) in the correct position. The full charging time
is 4 hours. The sensors are always on (standby mode)
and ready to connect to the control device.
Our research focused on operation time of
FitLight batteries has revealed that full charge
provided 6 hours of continuous operation while the
ability to work in standby mode was 72 hours without
recharging.
The Blazepod is a not replaceable 600 mAh Li-
pol – battery. Charging is carried out via the charging
station included in the kit via the microUSB cable,
also included in the kit.
The sensors are positioned one above the other,
stable due to the cone shape. Charging is performed
with a standard USB port (110-240V ac adapter,
PowerBank, USB PC socket).
It is available to charge this device from a single
charging station using a single power source up to 8
sensors simultaneously. The full charge time is 2
hours. The sensors are always on, in standby mode,
and ready to be connected to the control device.
So the BlazePod battery provides 8 hours of
operation and it can work in standby mode for 200
hours without recharging.
Modern Light Sport Training Systems: Critical Analysis of Their Construction and Performance Features
125

XLiGHT has 600 mAh LiPol-ion battery,which is
not replaceable as in BlazePod. Charging is carried
out through an individual connection of the sensor via
a microUSB cable to a power source (110-240V ac
adapter, PowerBank, USB PC socket). It comes with
two microUSB cables with 4 charging ports each. So
to charge 6 or more sensors simultaneously, you need
two power sources with USB ports. The full charge
time is 2 hours. The sensors are equipped with an
automatic shutdown system in case of prolonged
absence of communication with the control device.
Self-shutdown of the sensor takes place after 15
seconds of inactivity. Switching on is done manually,
which significantly saves battery power during
standby mode. The measured time of work in the
standby mode was 500 hours without recharging (our
experimental data).
So, FitLight is the least mobile and requires 110-
220 ac. The FitLight sensors have the fastest self-
discharge time since they are always in the switched-
on state. The Blazepod operate without recharging for
several days. For long-term field work the presence
of a powerbank is required. XLight has the longest
self-discharge time.
3.1.5 Accessories
It should be mentioned that the availability and
accessibility of accessories is a very important factor
influencing the possibility of using the analyzed sport
simulators. The purpose of the additional elements is
to organize the mounting of the sensor on various
surfaces.
Since the FitLight Trainer was first introduced to
the market, and has long been used in various sports
and training conditions, it has a large arsenal of
optional accessories (Figure 4).
Figure 4: FitLight trainer accessories.
There is a number of accessories available for
different training conditions: protective cones for
working with feet on horizontal surfaces, magnetic
holders - for working on metal surfaces; frames for
use in open spaces: protective covers for using
sensors as targets in football or tennis, etc. The list of
available accessories is constantly growing and
expanding thanks to the efforts of the manufacturer.
The drawback is the rather high cost of accessories.
The accessories kit includes a Velcro fastening
system and self-adhesive plates both allow you to
organize a fastening to any surface. The disadvantage
of this method is the unreliability of the jointly
formed contact patch since the support element is
attached to the sensor with a latch. During intense
training or testing, when the athlete deactivates the
sensor not by hitting the center precisely but on
spherical edge when the sensor is located on a vertical
wall, an excessive load on the latch leads to a
breakdown of the mounting system. With a very
reliable and durable lamp, the fasteners (latchers) are
the weakest place in FitLight system. In addition, it is
not amenable to self-repair.
The Blazepod trainer does not have any additional
attachments to the surfaces. Only horizontal use is
implied. The sensor has a coating of contact surface
that prevents excessive slipping, which makes it
comfortable to use on any surfaces (lawn, asphalt or
parquet). To expand the training capabilities, the
following accessories are available (Figure 5).
Figure 5: Blazepod accessories.
The kit includes universal mount for fixing the
sensor and suction cups for smooth vertical surfaces
(mirror, glass). There are belts for attaching the
sensor to items such as a punching bag, pole, etc. The
option of mounting on a training cone is also
available. All above mentioned expands the range of
use of the Blazepod simulator.
The XLiGHT sensors already have a built-in
magnetic mount, allowing them to be placed on metal
surfaces in any planes without the use of additional
elements. The installed magnet is powerful enough
that the sensor can be fixed even horizontally above
the athlete without fear of the sensor falling. In
addition, self-adhesive magnetic platforms for
placement on all surfaces and powerful magnets with
Velcro are included. Reflective pads are available for
purchase to work with the sensor with such elements
icSPORTS 2021 - 9th International Conference on Sport Sciences Research and Technology Support
126
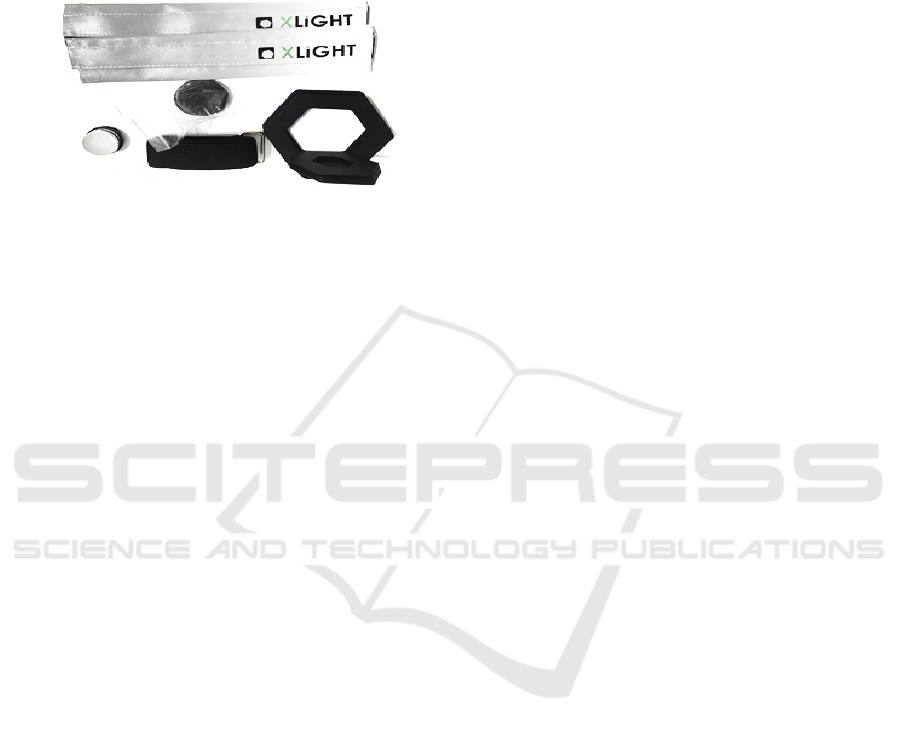
as a club or a racket. The metal platforms for
mounting on a cone or for vertical positioning of the
sensor on a horizontal surface, straps for mounting on
vertical elements (punching bag, pole) are also
available to buy separately. Possible options are
shown in Figure 6.
Figure 6: XLiGHT accessories.
Each of the considered simulators has in its
arsenal a set of mounts available for purchase, which
allows to significantly expand the scope of this
simulator and significantly diversify the training
process.
3.2 Connection Features
3.2.1 Common Features
Each of the three described simulators has the ability
to connect to a control device, which is responsible
for the execution of the "request-response" command
by the sensor with fixing the time of its execution.
Each simulator has original software made
exclusively for this type of sensors.
All visual coordination simulators are controlled
with mobile applications. Applications are original
software products adapted to a unique type of sensor.
The sensors of all simulators have an individual code
and connection algorithm and work exclusively with
their own application. In this case, it is possible to
connect an additionally purchased sensor of any of
the above systems to an application corresponding to
this sensor. Thus, it is possible to replace the failed
sensor individually, avoiding replacing the entire set.
3.2.2 Control Devices
FitLight is a tablet PC running Android OS with pre-
installed original software and an original Bluetooth
communication module with an extension of up to 24
connected devices. This control device is included in
the delivery package and is the only possible way to
control the sensors. The control device is also
equipped with an individual charger, which requires
an additional connection to the 110-240 V ac.
The control device of Blazepod is a smartphone
with the Android and Ios operating system. It is
necessary to have a module in the smartphone that
connects via the Bluetooth protocol. Various
smartphone manufacturers set the maximum number
of Bluetooth-enabled devices, usually from 3-12.
Each sensor is an independent Bluetooth device. This
must be taken into account when choosing a
smartphone to work with the simulator. The control
device is not included in the package. It is assumed to
use a personal device, or purchased additionally for
these purposes.
XLiGHT-the control device is a smartphone with
the Android and Ios operating systems. It is necessary
to have a module in the smartphone that connects via
the Bluetooth protocol. Various smartphone
manufacturers set the maximum number of
Bluetooth-enabled devices, usually from 3-12. Each
sensor is an independent Bluetooth device. It is
necessary to take this into account when choosing a
smartphone to work with the simulator. The control
device is not included in the package. It is assumed to
use a personal device, or purchased additionally for
these purposes.
All visual coordination simulators are controlled
by mobile applications. Applications are original
software products adapted to a unique type of sensor.
The sensors of all simulators have an individual code
and connection algorithm and work exclusively with
their own application. In this case, it is possible to
connect an additional sensor purchased from any of
the above systems to the application corresponding to
this sensor. In this way, it is possible to replace the
failed sensor individually, avoiding replacing the
entire set.
3.2.3 Limitations of the Bluetooth Protocol
The Bluetooth™ protocol imposes certain restrictions
on the use of devices, while the FitLight simulator
uses a hardware amplifier signal, which allows you to
expand the work distance of the device up to 100 m.
The Blazepod simulators use an amplified signal
from the sensor, which allows you to work with the
control device up to 70 meters distance.
Xlight uses the Bluetooth receiver of the device
(smartphone) which limits the range to 30-40 meters
Blazepod and XLiGHT use Bluetooth receiver of
the device (smartphone) which limits the range to
30-40 meters.
Using simulators as testing tools, it is necessary to
take into account the position of the control device
relatively to the sensors, because any movement of
the control device, as well as the occurrence of
Modern Light Sport Training Systems: Critical Analysis of Their Construction and Performance Features
127
obstacles in the path of the signal passage, affects the
result of the “signal – response” feedback.
3.2.4 Software Features, Localization
Fitlight and Blazepod are controlled by an app with
an interface in English, no localization is provided.
XLiGHT is controlled by the application in Russian
with the ability to change the control language to
English (pre-installed in the application). Each of the
applications has several preset options for different
workouts, and the number of them varies:
FitLight: there are 12 preset options, divided by
sport, with an ability to customize the parameters
(sensor distance, sensitivity, color and mode, time
delay, timeout, etc) in each option;
BlazePod has more than 100 preset options,
broken down by the training focus. There is no ability
to change any option, but users can create their own
training program based on preset exercises with the
ability to save them as new. Each of the options
presented has a detailed scheme and visualization of
the performance in the form of photos and video
content;
XLiGHT suggests 19 preset original exercises
without reference to a specific sport and type of
training. There is an ability to create an individual
exercise as a separate mode.
Localization: Fitlight and Blazepod are controlled
by an application that has an interface in English,
localization is not provided. XLiGHT is controlled by
the application in Russian with the ability to change
the language to English (pre-installed in the
application).
3.2.5 Functional Capabilities of Sensor
(Signal-Response)
Each of compared sensors have their peculiarities
(Table 4).
3.2.6 Data Upload, Storage, Synchronization
The software of each simulator has an algorithm for
forming and storing a database of the training process.
Each of the presented simulators has the ability to
create an individual profile, link it to a sport, store
training and testing data, and send it by email. csv
format. The amount of information stored is limited
by the memory of the device that is used to control
the sensors.
3.3 Operation Features
3.3.1 Using in Training
Each of the presented simulators has a number of
functions for implementation in the process of sports
training. Interaction with the sensors is carried out
through a visual analyzer and a sequence of actions
determined by a specific exercise. Thus, the task of
coordinating motor actions is performed in
accordance with the specified parameters: flash time,
flash duration, touch time (interrupting the photocell).
This allows you to objectively assess the speed and
correctness of the exercise during sports training.
3.3.2 Using for Testing
To determine comparables of data obtained from
three Light sport systems in testing following
experiment was carried on. Group of athletes (n=50)
11 years old were tested for “Hand-Eye coordination”
in the same conditions (light placement and testing
time) using all simulators. The following average data
were achieved: Fitlight 439,73±55,42 ms; XLiGHT –
497,71±62,24 ms; Blazepod – 564,60±55,03 ms.
The main limitation of using Blazepod and
XLiGHT simulators as testing tools is their instability
in response time to interaction. Blazepod simulator
has no photosensor. That is why it is impossible to
measure reaction time reliably. To trigger the sensor,
a touch with some force is required, which is not
described in the manual and cannot be measured.
At the same time using one simulator allows to
test a group of athletes without comparison with other
groups tested by another simulators (Chepanov,
2021).
At the time of writing, the XLiGHT simulator is
not widely distributed, which does not allow using it
as a reliable source of information for testing.
Table 4: Functional capabilities of sensors in sport training systems.
LED indication:
full
LED indication:
centre only
Touch
sensor
Impact
sensor
Сlose range photo
sensor
Long range photo
sensor
FitLight + + + - + +
Blazepod + - + - - -
XLiGHT + - + + + +
icSPORTS 2021 - 9th International Conference on Sport Sciences Research and Technology Support
128

The main reason is the lack of a description of the
delay time of the response of the photo sensor and the
touch sensor. These simulators are also used with
various devices (smartphones, tablet computers),
which is a limitation on the reproducibility of test
results due to the difference in the speed of
information exchange between the control device and
the sensor installed by the manufacturer of
smartphones and tablet computers and different not
only within the manufacturers, but also device
models. Due to its rather long presence on the market
(10 years), the FitLight simulator is widely used in
organizations engaged in sports training
(Rogozhnikov, 2020). At the same time, the
components used have a standard response time (90
ms).
The control device also has the same
characteristics, regardless of the set and the
prescription of delivery. All of the above allows you
to use the FitLight simulator as a testing tool with
high reproducibility of the result (Shvab, 2020),
(Zakharova, 2019).
4 CONCLUSIONS
Three light sport gadgets ̶ Fitlight
TM
, Blazepod and
XLiGHT have been the subject of discussion. Their
physical data and software, operation features and
energy supplement were considered to determine
cons and pros as well as to define the convenience and
validity of using the applications in training and
testing. All devices under consideration are excellent
instruments for organizing the innovative
coordination and agility training.
Fitlight
TM
trainer can be considered the most
optimal tool for the athletes testing as it provides the
more reliable response time due to the fact that
control device is included. In other devices signal
processing algorithm based on the "receive-
transmission" principle completely depends on
Bluetooth controller smartphone.
Blazepod is easy to connect and does not require
special skills in mastering the software. Each exercise
in software is provided with detailed instructions and
video demonstration. It is not recommended to use it
as a test tool because of the large difference in
response time on different control devices. XLiGHT
is the youngest among the presented systems and has
gained the best features of sport training systems
previously released by competitors. But it is still
“half-made”, thus it needs improvement both in
hardware and software.
REFERENCES
BlazePod presentation. (2017). URL:https://www.prweb.
com/releases/blazepod/2017/prweb14122536.htm
(date of request 27.08.2021)
Chepanov, N., (2021). Training and monitoring of motor
responses in karate using a specialized simulator. In
THEORY AND METHODOLOGY OF SHOCK TYPES
OF MARTIAL ARTS materials of the All-Russian
scientific and practical conference with international
participation, dedicated to the memory of Professor,
Doctor of Pedagogical Sciences, ZMS of the USSR, ZT
of the USSR, K. V. Gradopolov. Moscow, 2021
FitLight manual. (2021).
URL:https://5cb53c2b-610e-4939-967e-b75d780db3a5.
filesusr.com/ugd/da63a6_f116ea2d7f6445f78d546cbd
d195bdfb.pdf (date of request 27.08.2021)
Rogozhnikov, M., Baturin, A., Yakovlev, Yu., Kuritsyna,
A. (2020). ‘FitLight’ training system benefits for
neuromuscular control training in basketball. In Theory
and Practice of Physical Culture. 2020. № 9. С.
Shvab, K., Zakharova, A., Ezhov, A. (2020). Innovative
digital technologies for coordination assessment in
hockey players. In Materials of the scientific
symposium dedicated to the 95th anniversary of the
T&PFC magazine, Moscow, 2020).
Zakharova, A., Mekhdieva, K., Krasilnikov, V.,
Timokhina, V. (2019). Soccer Players’ Agility:
Complex Laboratory Testing for Differential Training.
In 7th International Conference on Sport Sciences
Research and Technology Support, icSPORTS- 2019.
Modern Light Sport Training Systems: Critical Analysis of Their Construction and Performance Features
129
