
Effect on User Impression of Robot’s Task Dependent Uniform
Kazunari Yoshiwara
1
and Kazuki Kobayashi
2
1
Graduate School of Science and Technology, Shinshu University, Nagano 380-8553, Japan
2
Academic Assembly, Shinshu University, Nagano 380-8553, Japan
Keywords:
Uniform Changing Robot, Robot Clothing, Housekeeping Robot.
Abstract:
In this paper, we investigated the impressions of users when a humanoid robot is dressed in uniforms that
match tasks. Increasingly more robots, such as humanoid robots, can perform multiple tasks on a single
machine. In such a case, it is important to design the appearance of robots and their uniforms according to
the content of the task because these factors are known to express their level of expertise and technical ability.
In our proposed method, a robot changes its appearance dynamically by replacing its uniform with one that
matches a task before performing it. The results of our simulator-based experiments indicated that, compared
with robots that do not wear a uniform, robots that changed their uniform to match a task were interpreted as
being more appropriate, even after making mistakes.
1 INTRODUCTION
In recent years, the range of applications for robots is
rapidly expanding because of advances in not only the
industrial field, but also fields such as medical care
(Heerink et al., 2016), nursing (Huisman and Kort,
2019), agriculture (Hejazipoor et al., 2021), forestry
(Parker et al., 2016) and fisheries (Takagi et al., 2016),
and education (Belpaeme et al., 2018). When robots
become more widespread than they are today, their
appearance will be one of the most important factors
because it is an element that can provide clear infor-
mation about a robot and its intended function.
Many researchers have been studying the appear-
ance of robots. Złotowski et al. (Złotowski et al.,
2020) reported that the appearance of a robot is im-
portant for people in regard to their perceptions of its
capabilities and preferences for it to perform a spe-
cific task. Komatsu et al. (Komatsu and Yamada,
2008) reported that the same information is inter-
preted differently by users depending on the appear-
ance of a robot. In a prisoner’s dilemma game on a
computer, Kiesler et al. (Kiesler et al., 1996) found
that users who had owned a dog were more likely to
cooperate with a dog-shaped robot than were those
who had not. Komatsu et al. (Komatsu and Yamada,
2011) reported that an adaptation gap, that is, a dif-
ference between the functions users expect based on
a robot’s appearance and the functions users perceive
through actual interactions, significantly affects robot
evaluations. Song et al. (Song and Yamada, 2019)
investigated users interpretation for LED expression
by a cleaning robot. Although these findings indicate
that the appearance of a robot leads to significant bi-
ases among users, few studies have investigated robot
clothing or software agents.
Here, we focus on clothing in terms of a robot’s
appearance and investigate the effects of changing
clothing to match a task on the impressions of users
and their evaluations of its work performance. The
public has shown interest in robotic clothing, and
an event on robot fashion has already been held
1
.
From a functional perspective, clothing provides in-
sulation against cold and protection against ultravi-
olet rays, wind, rain, and other environmental haz-
ards (Havenith, 2002). Also, as social effects, uni-
forms can convey expertise, position, qualifications,
and membership in a group (Joseph and Alex, 1972).
Singer et al. (Singer and Singer, 1985) investigated
the effects of police uniforms and found that police
officers who were photographed in their uniforms
were perceived as more competent, reliable, intelli-
gent, and helpful compared with a face-only photo-
graph or a full-length photograph dressed in civilian
clothing. Shao et al. (Shao et al., 2004) investi-
gated the relationship between consumers’ motivation
to buy and employees’ clothing and found that more
appropriate employee clothing improved customers’
motivation to buy.
1
https://www.nippon.com/en/views/b00911/
90
Yoshiwara, K. and Kobayashi, K.
Effect on User Impression of Robot’s Task Dependent Uniform.
DOI: 10.5220/0010684500003060
In Proceedings of the 5th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2021), pages 90-97
ISBN: 978-989-758-538-8; ISSN: 2184-3244
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Although there are not many examples of research
that allow robots to wear clothes, Ledge et al. (Legde
and Cunningham, 2019) have reported that the virtual
agents’ personality characteristics that users interpret
are influenced by the agents’ clothing. However,
their investigation did not cover dynamically chang-
ing clothing. By adapting the effects of a uniform to
robots, functionally, the robot will be prevented from
being soiled by substances such as oil, and socially,
the robot will express its specialty as well as a hu-
man would. In addition, since autonomous robots can
carry out tasks without clear instructions, the expres-
sion of clothing may become a natural way to transmit
such information to the user, in addition to the actual
function. For these reasons, uniforms may be benefi-
cial as an appearance effect for robots. Therefore, this
simulation-based study aimed to investigate the pos-
sible impression effects on users of a robot changing
its uniform to match a task.
2 SIMULATOR-BASED UNIFORM
CHANGING ROBOT
We developed a uniform changing robot and an origi-
nal housekeeping simulator on a Web-based platform.
2.1 Uniform Changing Robot
Figure 1 shows the robots we designed in the house-
keeping simulator, one wearing no uniform and the
other wearing a task-specific uniform. The robot’s
appearance is inspired by Pepper, the widely known
semi-humanoid robot manufactured by SoftBank, be-
cause Pepper has a commonly known design that was
developed considering the uncanny valley (Pandey
and Gelin, 2018). The uncanny valley is a concept
in which an artifact resembles an existing organism
so closely that it causes people to have an emotional
response (Mathur and Reichling, 2016; Ho and Mac-
Dorman, 2010). This effect is one of the important
design guidelines for the robot’s appearance.
The uniforms were designed based on the robot’s
three housekeeping tasks: cleaning, washing, and
cooking. In the cleaning task, the robot wears a blue
cloth and a hat like a building cleaner. In the washing
task, the robot wears an apron and a bandana. In the
cooking task, the robot wears a chef’s cap and coat.
2.2 Housekeeping Task Simulator
Bugmann et al. reported that housework was the most
important job for domestic robots, as many people
want robots to perform the cleaning, washing, and
No Uniform Cleaning
Uniform
Washing
Uniform
Cooking
Uniform
Figure 1: Appearance of robot in each task.
cooking (Bugmann and Copleston, 2011). Moreover,
Kang et al. conducted a study based on the three
scenarios of cleaning, washing, and cooking in re-
search to investigate the necessary functions for do-
mestic robots (Kang et al., 2020). Based on those pre-
vious studies, the present study designed household
cleaning, washing, and cooking tasks for the robot to
perform. Figure 2 shows the developed housekeeping
simulator consisting of a room in an ordinary home.
The robot in the simulator can move up, down, left,
and right within the room to perform the three tasks of
cleaning, washing, and cooking. Objects in the simu-
lator such as the refrigerator and kitchen are animated
when the robot manipulates them. Figure 3 shows the
ways the kitchen is animated before, during, and after
cooking.
2.3 User Interface
The right side of Figure 2shows a remote control and
messages for users. Users request the robot to per-
form a task indicated by a button on the remote con-
trol. The tasks to be performed are automatically dis-
played on the screen in the message area, and the
users can then manipulate the remote control.
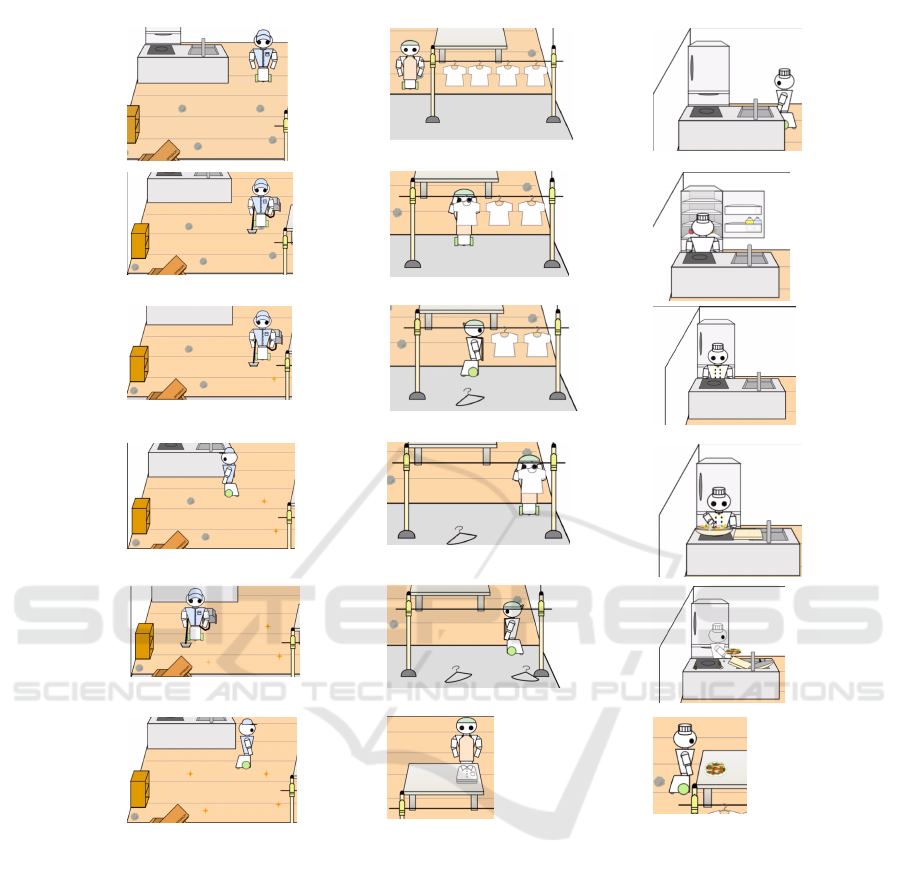
2.4 Robot Behavior
Figure 4 shows the robot behavior for each task. The
robot changes its uniform whenever it begins to per-
form a task at the initial position near the door in the
room. The tasks to be performed by the robot were
set as cleaning, washing, and cooking. In the cleaning
task, the robot and moves slowly across the floor and
vacuums. As the robot cleans, the scattered debris on
the floor gradually fades in color until an animation
plays in which the floor is shiny. In the washing task,
the robot moves to a clothesline and collects washed
clothes before moving to place them on a table. In the
cooking task, the robot moves in front of the refrig-
erator and removes food before using the frying pan
and bringing the prepared food to a table.
Effect on User Impression of Robot’s Task Dependent Uniform
91
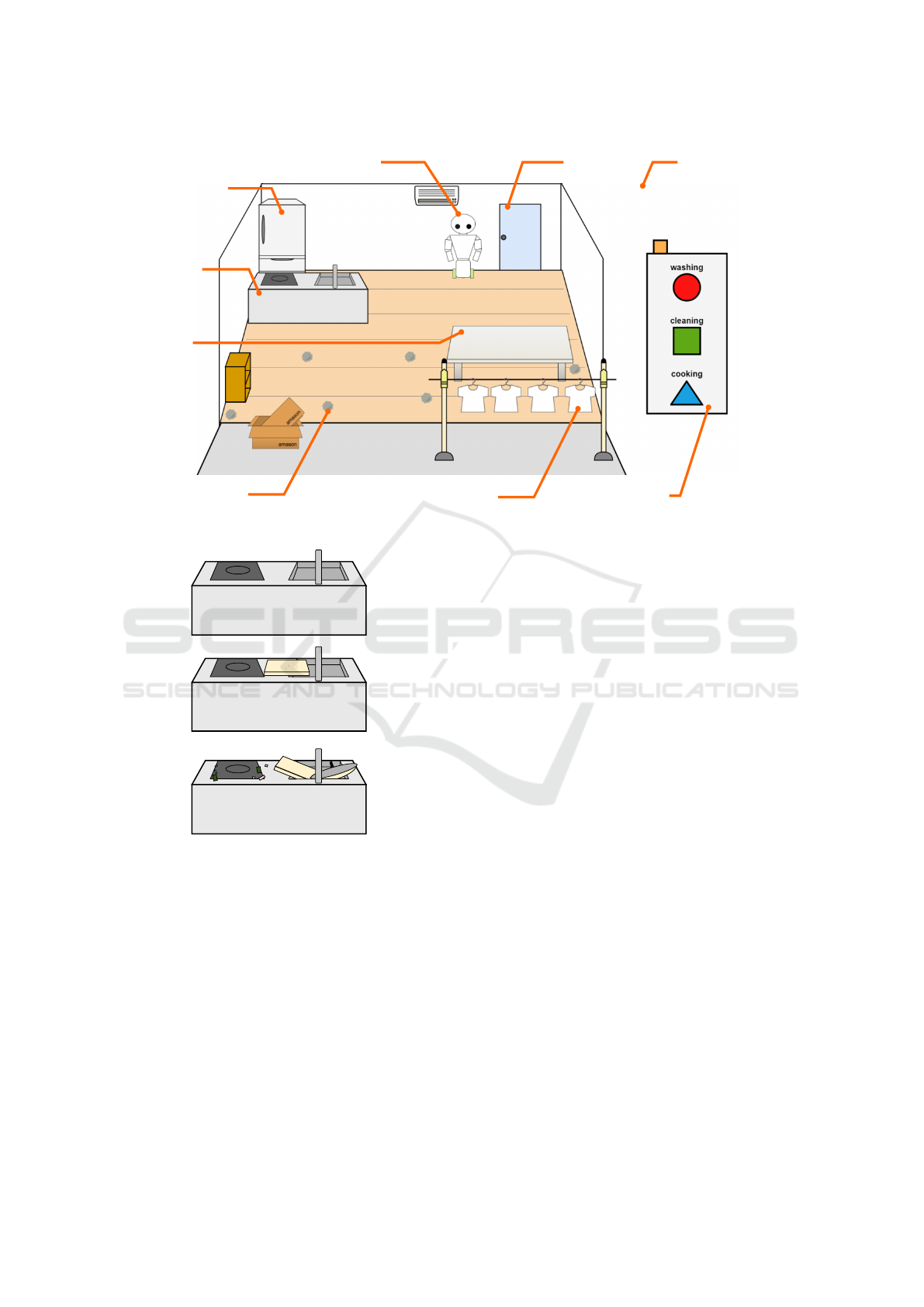
Refrigerator
Kitchen
Door
Table
Washed clothes
Messages
for user
Robot
Remote control
Please send a command
of "cleaning"
Garbage
Figure 2: Housekeeping task simulator.
Figure 3: Animations in kitchen.
3 EXPERIMENT
To investigate user impressions of the robot chang-
ing its uniform according to the requested task, we
performed experiments with 20 male university stu-
dents (mean age = 22.1, standard deviation = 0.72).
The participants were requested to send commands to
the robot in the simulator according to the instructions
displayed on the screen.
3.1 Task Incompleteness
In the experiment, the robot was set to not accomplish
each task completely to increase the degree of free-
dom of the subjective evaluations of its behavior and
clarify the effects of uniform changing. In the clean-
ing task, a few pieces of debris were left on the floor.
In the washing task, a few hangers were dropped and
left on the floor. In the cooking task, the pans and cut-
ting boards used for cooking were left in the sink, and
some small pieces of food were left around the range.
3.2 Task Evaluation by the Participants
At the end of each task, to confirm the users’ indi-
vidual interpretations of and satisfaction with the per-
formed task, the participants were asked to input their
judgment of the quality of each task performed by the
robot along with their subjective satisfaction. Figure
5 shows the evaluation window and score sliders for
each task. The score ranged from 0 (unsatisfied or
low quality) to 9 (satisfied or high quality). As soon
as a task was finished, the evaluation window was dis-
played at the top of the simulator screen. When a
participant finished inputting scores, messages with
further instructions were displayed at the top of the
remote control.
3.3 Experimental Procedure
The participants were instructed about the experiment
as follows.
CHIRA 2021 - 5th International Conference on Computer-Human Interaction Research and Applications
92
①
②
③
④
⑤
⑥
Cleaning Task
①
②
③
④
⑤
⑥
Cooking Task
*After moving to the table
①
②
③
④
⑤
⑥
Washing Task
*After moving to the table
Figure 4: Robot behavior in each task.
• It will take about 15 minutes to complete this ex-
periment.
• Manipulate the remote control on the screen to re-
quest that the robot perform a task.
• Observe the behavior of the robot and check that
the task was performed appropriately.
• Whenever the task is completed, input your sub-
jective satisfaction and quality scores.
We did not provide any information about the
robot’s uniform or task incompleteness. During the
experiment, the participants sat in a chair in front of a
24-inch monitor on a desk.
3.4 Experimental Conditions
The experiments were performed under two condi-
tions: a uniform changing condition and a no-uniform
condition. We used a between-participants experi-
mental design. In the uniform changing condition,
the robot changes its uniform to match the task before
starting it. After finishing the task, the robot moves
back to the initial position near the door in the sim-
ulation room and removes the uniform. In the no-
uniform condition, the robot performs a task while
wearing no uniform. The order of the robot’s tasks
was randomized under each condition.
Effect on User Impression of Robot’s Task Dependent Uniform
93

Figure 5: Evaluation window and score sliders for each
task.
3.5 Evaluation Indices
The participants were asked to reply to a question-
naire survey after the robot had finished all its tasks.
The questionnaire was composed of seven Likert-type
scaled questions and a free writing area. The ques-
tionnaire items were based on part of Heerink’s model
(Heerink et al., 2010), which includes Davis’s Tech-
nology Acceptance Model (TAM) (Davis, 1989) and
items related to perceived enjoyment and trust. The
items related to trust, perceived usefulness, intention
to use, and social presence were used in the present
questionnaire. In addition, the items described in
section 3.2 related to the clothing change, subjective
quality of the task, and subjective satisfaction of the
task were used. The independent variable was uni-
form changing or not, and the dependent variables
were the satisfaction score, the quality score, and the
questionnaire items.
4 RESULTS
The Mann–Whitney U test was used to conduct the
statistical analysis for the task evaluation (satisfaction
and quality) and questionnaire items after the experi-
ment (Mann and Whitney, 1947). This is because the
number of experimenters was small (N = 10 for each
condition), so it was difficult to judge whether to fol-
low a normal distribution (Nachar, 2008).
Table 1 shows the satisfaction scores for the robot
tasks and the results of the statistical analysis. Al-
though no significant difference was seen in the sat-
isfaction scores between conditions, all mean values
for the uniform changing condition were higher than
those for the no-uniform condition.
Table 2 shows the quality scores for the robot tasks
and the result of the statistical analysis. We conducted
the Mann–Whitney U test for both scores and found
no significant difference between conditions. How-
ever, all mean values for the uniform changing con-
dition were the same or higher than those for the no-
uniform condition.
Table 3 shows the questionnaire scores and the
results of the statistical analysis using the Mann–
Whitney U test. A significant difference was found
between conditions for Q4 (U = 18.0, d f = 18.0, p =
0.015).
Table 4 shows the frequency and order of occur-
rence of each task throughout the experiment. Al-
though the order of the tasks were randomized, no
extreme bias was observed.
5 DISCUSSIONS
5.1 Effects of Changing Uniforms by
Robots
No significant differences in satisfaction and quality
scores were found between conditions. However, all
mean values for the uniform changing condition were
the same or higher than those for the no-uniform con-
dition. These results suggest that users of the robot
under the uniform changing condition perceived the
same or better satisfaction and quality compared with
the robot under the no-uniform condition, and that no
users experienced any negative effects of the uniform
change.
A significant difference was found between con-
ditions for Q4. This result shows that the participants
interpreted the behavior of the robot under the uni-
form changing condition as being more appropriate,
even if the task was incomplete, compared with that
under the no-uniform condition. One participant’s
free comment (”I felt like the robot was choosing the
right clothes for the job”) also supports the effect of
the uniform changing condition. Although no sig-
nificant differences were seen in the other items be-
tween conditions, Q5 and Q9 had higher values under
the uniform changing condition. These results sug-
gests that the participants noticed the incompleteness
of the tasks more clearly under the uniform chang-
ing condition than under the no-uniform condition;
however, the participants preferred the robot in the
uniform changing condition over the robot in the no-
uniform condition. Regarding whether the uniform
was appropriate, the results of Q1 indicated that more
participants recognized the change of clothing. How-
CHIRA 2021 - 5th International Conference on Computer-Human Interaction Research and Applications
94
Table 1: Satisfaction scores for robot tasks.
Uniform changing condition No-uniform condition
Satisfaction Mean SD Mean SD U value df p value
Cleaning 4.90 1.85 4.20 2.20 42.5 18.0 0.591
Washing 6.80 1.55 5.40 2.76 35.0 18.0 0.266
Cooking 5.90 2.38 5.70 2.83 32.5 18.0 0.193
Table 2: Quality scores for robot tasks.
Uniform changing condition No-uniform condition
Achievement Mean SD Mean SD U value df p value
Cleaning 4.80 1.81 3.50 1.96 42.0 18.0 0.558
Washing 7.30 1.57 6.90 1.66 49.0 18.0 0.969
Cooking 7.40 1.84 7.40 1.51 47.5 18.0 0.869
Table 3: Questionnaire scores.
Uniform changing No-uniform
condition condition
No. Question Mean SD Mean SD U value df p value
Q1 How many kinds of clothes did you
think there were?
2.89 1.01 1.44 0.78 – – –
Q2 Do you think the robot completed
the task quickly?
5.60 0.70 5.20 1.87 50.0 18.0 1.000
Q3 Do you think the robot is reliable? 4.30 1.16 4.40 1.78 44.0 18.0 0.670
Q4 Do you think the robot’s actions in
the task were appropriate?
6.20 1.03 4.30 1.77 18.0 18.0 0.015
Q5 Do you think the robot made many
mistakes during the task?
5.30 1.34 4.40 2.01 38.0 18.0 0.369
Q6 Do you think the robot has feel-
ings?
2.70 2.16 2.10 1.66 41.5 18.0 0.522
Q7 Was it easy to check the movement
of the robot on the screen?
6.50 0.53 6.60 0.70 42.5 18.0 0.539
Q8 Did you want to ask the robot to
perform other tasks?
4.60 1.90 4.70 2.16 47.0 18.0 0.847
Q9 Would you want to use the robot
daily?
4.20 1.75 3.40 1.78 36.5 18.0 0.313
Q10 Did you command the robot cor-
rectly?
5.80 1.87 6.10 1.29 47.0 18.0 0.835
Table 4: Frequency and order of occurrence of each task.
Task 1st 2nd 3rd
Cleaning 8 6 6
Washing 6 7 7
Cooking 6 7 7
ever, no comments indicating that the participants felt
uncomfortable about the robot’s uniform were seen
in the questionnaires or interviews after the experi-
ment. On the other hand, one participant noted that
”I thought it was strange to wear a hat while cook-
ing when the robot didn’t have hair.” We designed the
robot in order to protect it from effects such as foul-
ing, but we found that there was still a certain sense
of incongruity regarding its clothing. Therefore, it is
considered necessary to redesign the robot clothing to
avoid this incongruity.
5.2 Limitations
This study did have some limitations. First, the partic-
ipants were all young males (average age: 23.1 years)
and the small number of participants. Since this study
targets robotic housework, it is necessary to increase
the number of participants of a wider age range and
female participants to verify the effectiveness of the
proposed method.
Second, the experiment used a virtual robot shown
in a Web browser, not a real robot. Therefore, the
feasibility of the task, the presence or absence of me-
Effect on User Impression of Robot’s Task Dependent Uniform
95

chanical noise from the robot, and the speed of move-
ment are factors that differ from the case of using an
actual robot.
Finally, in the experiment, we used an animation-
based virtual space instead of a real space. There-
fore, participants may react differently when using an
actual robot in a real space. In addition, the tasks
performed by the robot were limited to housekeep-
ing tasks. In housekeeping tasks, a user and a robot
share a relatively small space, and there are many sit-
uations in which their activity ranges overlap. It is
necessary to investigate the applicability of the pro-
posed method not only to housekeeping tasks but also
to tasks in public spaces such as commercial facilities.
6 CONCLUSION
This paper proposed a uniform changing robot and
conducted experiments involving a housekeeping task
simulator. In the experiments, a robot performed
cleaning, washing, and cooking tasks according to the
participants’ commands. We investigated user im-
pressions of robots that either wore no uniform or
changed its uniform to match the task. The exper-
imental results suggested that the participants inter-
preted the behavior of the robot under the uniform
changing condition as being more appropriate, even
if the task was incomplete, compared with that under
the no uniform condition. Although the appearance
of a robot can lead to significant biases among users,
there have been few studies on the effects of clothing.
In the present study, we investigated how the uniforms
worn by robots can affect such biases. This effect can
inform users that a robot has a specialty and can per-
form multiple tasks well, and may be effective for ex-
pressing the internal state of an autonomous robot. At
present, having a robot actually change its clothes by
itself remains a technical problem; however, a flexi-
ble display on the body of the robot could provide the
same function as uniform changing. We plan to ex-
pand the scope of this research with participants and
conduct experiments from different perspectives, be-
cause a uniform that conveys expertise, position, qual-
ifications, and group membership could be effective
for the design of robots.
REFERENCES
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati,
B., and Tanaka, F. (2018). Social robots for education:
A review. Science Robotics, 3:eaat5954.
Bugmann, G. and Copleston, S. N. (2011). What can a per-
sonal robot do for you? In Proceedings of the 12th
Annual Conference on Towards Autonomous Robotic
Systems, TAROS’11, page 360–371, Berlin, Heidel-
berg. Springer-Verlag.
Davis, F. D. (1989). Perceived Usefulness, Perceived Ease
of Use, and User Acceptance of Information Technol-
ogy. MIS Quarterly, 13(3):319–340.
Havenith, G. (2002). Interaction of Clothing and Ther-
moregulation. Exogenous Dermatology, 1(5):221–
230.
Heerink, M., Kr
¨
ose, B., Evers, V., and Wielinga, B. (2010).
Assessing Acceptance of Assistive Social Agent Tech-
nology by Older Adults: the Almere Model. Interna-
tional Journal of Social Robotics, 2(4):361–375.
Heerink, M., Vanderborght, B., Broekens, J., and Alb
´
o-
Canals, J. (2016). New Friends: Social Robots in
Therapy and Education. International Journal of So-
cial Robotics, 8(4):443–444.
Hejazipoor, H., Massah, J., Soryani, M., Asefpour Vakilian,
K., and Chegini, G. (2021). An intelligent spraying
robot based on plant bulk volume. Computers and
Electronics in Agriculture, 180:105859.
Ho, C.-C. and MacDorman, K. F. (2010). Revisiting the
uncanny valley theory: Developing and validating an
alternative to the Godspeed indices. Computers in Hu-
man Behavior, 26(6):1508–1518.
Huisman, C. and Kort, H. (2019). Two-Year Use of Care
Robot Zora in Dutch Nursing Homes: An Evaluation
Study. Healthcare, 7(1):31.
Joseph, N. and Alex, N. (1972). The Uniform: A Socio-
logical Perspective. American Journal of Sociology,
77(4):719–730.
Kang, D., Kwak, S. S., Lee, H., and Choi, J. (2020).
First Things First: A Survey Exploring Key Ser-
vices and Functions of a Robot. In Companion
of the 2020 ACM/IEEE International Conference on
Human-Robot Interaction, HRI ’20, pages 278–280,
New York, NY, USA. Association for Computing Ma-
chinery.
Kiesler, S., Sproull, L., and Waters, K. (1996). A prisoner’s
dilemma experiment on cooperation with people and
human-like computers.
Komatsu, T. and Yamada, S. (2008). Effect of Agent Ap-
pearance on People’s Interpretation of Agent’s Atti-
tude. In CHI ’08 Extended Abstracts on Human Fac-
tors in Computing Systems, CHI EA ’08, pages 2919–
2924, New York, NY, USA. Association for Comput-
ing Machinery.
Komatsu, T. and Yamada, S. (2011). Adaptation gap hy-
pothesis: How differences between users’ expected
and perceived agent functions affect their subjective
impression. Journal Systemics, Cybernetics and In-
formatics, 9(1):67–74.
Legde, K. and Cunningham, D. W. (2019). Evaluating the
Effect of Clothing and Environment on the Perceived
Personality of Virtual Avatars. In Proceedings of the
19th ACM International Conference on Intelligent Vir-
tual Agents, IVA ’19, pages 206–208, New York, NY,
USA. Association for Computing Machinery.
CHIRA 2021 - 5th International Conference on Computer-Human Interaction Research and Applications
96

Mann, H. B. and Whitney, D. R. (1947). On a Test of
Whether one of Two Random Variables is Stochasti-
cally Larger than the Other. The Annals of Mathemat-
ical Statistics, 18(1):50–60.
Mathur, M. B. and Reichling, D. B. (2016). Navigating a
social world with robot partners: A quantitative car-
tography of the Uncanny Valley. Cognition, 146:22–
32.
Nachar, N. (2008). The Mann-Whitney U: A Test for
Assessing Whether Two Independent Samples Come
from the Same Distribution. Tutorials in Quantitative
Methods for Psychology, 4(1):13–20.
Pandey, A. K. and Gelin, R. (2018). A Mass-Produced So-
ciable Humanoid Robot: Pepper: The First Machine
of Its Kind. IEEE Robotics Automation Magazine,
25(3):40–48.
Parker, R., Bayne, K., and Clinton, P. (2016). Robotics in
forestry. New Zealand Journal of Forestry, 60:8–14.
Shao, C. Y., Baker, J. A., and Wagner, J. (2004). The ef-
fects of appropriateness of service contact personnel
dress on customer expectations of service quality and
purchase intention: The moderating influences of in-
volvement and gender. Journal of Business Research,
57(10):1164–1176.
Singer, M. S. and Singer, A. E. (1985). The effect of po-
lice uniform on interpersonal perception. The Jour-
nal of Psychology: Interdisciplinary and Applied,
119(2):157–161.
Song, S. and Yamada, S. (2019). Designing LED lights
for a robot to communicate gaze. Advanced Robotics,
33:1–9.
Takagi, M., Mori, H., Yimit, A., Hagihara, Y., and Miyoshi,
T. (2016). Development of a Small Size Underwater
Robot for Observing Fisheries Resources – Underwa-
ter Robot for Assisting Abalone Fishing –. Journal of
Robotics and Mechatronics, 28(3):397–403.
Złotowski, J., Khalil, A., and Abdallah, S. (2020). One
robot doesn’t fit all: aligning social robot appearance
and job suitability from a Middle Eastern perspective.
AI & SOCIETY, 35(2):485–500.
Effect on User Impression of Robot’s Task Dependent Uniform
97
