
Testing Environment for Developing a Wireless Networking System
based on Image-assisted Routing for Sports Applications
Shiho Hanashiro
1
, JunFeng Xue
1
, Junya Morioka
1
, Ryusuke Miyamoto
2
, Takuam Hamagami
3
,
Kentaro Yanagihara
3
, Yasutaka Kawamoto
3
, Hiroyuki Okuhata
4
, Hiroyuki Yomo
5
and Tomohito Takubo
6
1
Graduate School of Science and Technology, Meiji University, Kawasaki, Japan
2
School of Science and Technology, Meiji University, Kawasaki, Japan
3
Oki Electric Industry Co., Ltd., Tokyo, Japan
4
Soliton Systems K.K., Tokyo, Japan
5
Faculty of Engineering Science, Kansai University, Suita, Japan
6
Graduate School of Engineering, Osaka City University, Osaka, Japan
hiroyuki.okuhata@soliton.co.jp, yomo@kansai-u.ac.jp, takubo@eng.osaka-cu.ac.jp
Keywords:
Image-assisted Routing, Testing Environment, AR Marker, Wireless Sensor Network, Vital Sensing.
Abstract:
To improve the effectiveness of exercise a novel vital sensing system is under development. For real-time
sensing of vital signs by a wireless network during exercise, image-assisted routing that enables dynamic
routing of a multi-hop network according to sensor locations estimated by visual information. To develop the
novel networking system, testing environment that enables runtime verification of dynamic routing based on
image processing. Experimental results actual sensor nodes with AR markers showed that locations of sensor
nodes obtained using a USB camera could be appropriately given to the control software of base station to
manage routing information.
1 INTRODUCTION
To improve the effectiveness of exercise and prevent
sudden illness, a novel vital sensing system is cur-
rently under development(Hara et al., 2017). Figure 1
illustrates the collection of vital signs via a multihop
wireless network. For the real-time sensing of hu-
man vitals by a wireless network during exercise, the
most significant challenge is the localization of sensor
nodes. This is owing to the inadequate operations of
conventional routing schemes based on the received
signal-strength indicator (RSSI) or global position-
ing system (GPS). To address this challenge, image-
assisted routing (IAR), which localizes sensor nodes
using visual information, was proposed(Miyamoto
and Oki, 2016). In IAR, vision-based human detec-
tion and tracking processes are applied to obtain the
location of humans wearing sensor nodes.
The vision-based localization of humans wear-
ing sensor nodes for vital monitoring comprises hu-
man detection and tracking. For the detection pro-
cess, an exhaustive search based on sliding windows
Figure 1: Collecting vital signs via a multi-hop wireless net-
work.
is adopted. Because accurate detection can be exe-
cuted(Oki et al., 2019b), its processing speed can be
improved, provided parallel processing is adopted, us-
ing specialized hardware and a graphics processing
unit (Oki and Miyamoto, 2017). Once accurate detec-
tion results are obtained by a detector, a simple track-
ing scheme (Yokokawa et al., 2017) that correlates de-
tection results over several frames of input images can
138
Hanashiro, S., Xue, J., Morioka, J., Miyamoto, R., Hamagami, T., Yanagihara, K., Kawamoto, Y., Okuhata, H., Yomo, H. and Takubo, T.
Testing Environment for Developing a Wireless Networking System based on Image-assisted Routing for Sports Applications.
DOI: 10.5220/0010690900003059
In Proceedings of the 9th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2021), pages 138-143
ISBN: 978-989-758-539-5; ISSN: 2184-3201
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
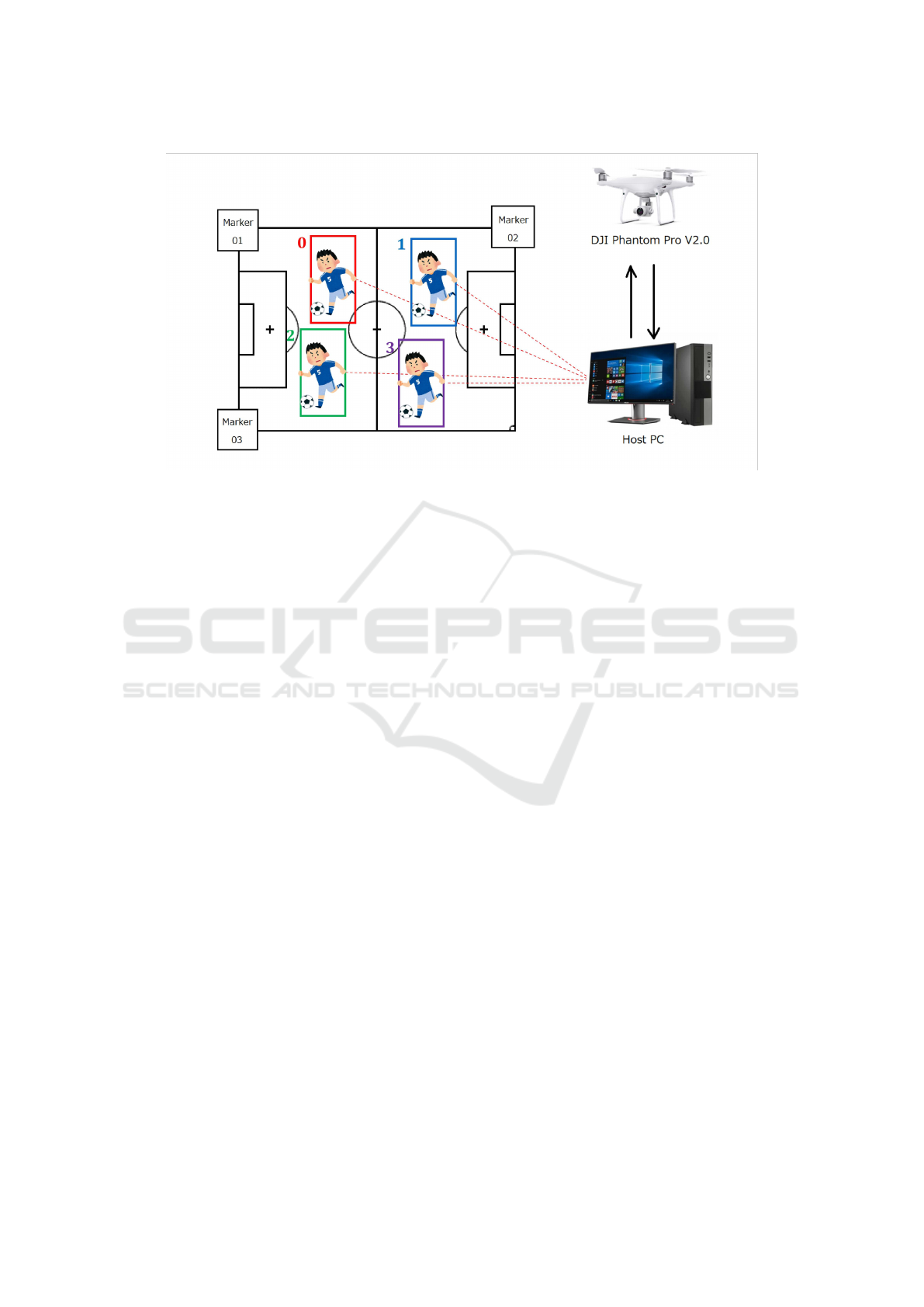
Figure 2: System overview.
be optimally adopted in this application. Fundamental
technologies for wireless networking have also been
developed to actualize the real-time vital sensing of
humans during exercise(Hara et al., 2020; Hamagami
et al., 2020).
As described above, elementary technologies that
are indispensable for IAR have been successfully de-
veloped. However, to develop the definitive sys-
tem for IAR that combines image-based localization
and wireless multi-hop networking, it is necessary to
verify the operational efficiency of dynamic routing
based on sensor locations estimated using visual in-
formation. Accordingly, this study proposes a novel
testing environment that enables the verification of
dynamic routing for multi-hop networking using lo-
cations of sensor nodes estimated by visual informa-
tion.
The System organization of this definitive system
is presented in Figure 2, where the video sequence
obtained from a drone flying in a sports field is uti-
lized to localize humans wearing sensor nodes based
on computer vision technologies. However, it is im-
practical to use a flying drone for the integration test,
where the algorithm and implementation of dynamic
routing based on image-based localization should be
verified.
To actualize an efficient system that supports the
development of a novel sensor networking system, a
testing environment that includes the vision-based lo-
calization of sensor nodes without drones is required,
as well as a wireless networking system identical to
the definitive system. In the testing environment, an
AR marker is attached to a sensor node, and its lo-
cation is determined using a USB camera. Estimated
locations are provided to the control software of the
base station that handles the routing information of
the sensor nodes. Via this approach, it is possible to
develop an algorithm and a system for novel wireless
networking systems.
2 RELATED WORK
This section explains the concept of IAR, as well as
the indispensable computer vision technologies re-
quired for IAR actualization: visual human detection
and tracking.
2.1 Concept of Image-assisted Routing
In image-assisted routing (IAR), dynamic routing
in multi-hop networking is performed using the lo-
cations of sensor nodes estimated by computer vi-
sion technologies, using a video sequence obtained
by a flying drone; however, conventional wireless
multi-hop systems control multi-hop networking us-
ing RSSI and/or GPS. In addition, although the sensor
node presented in Figure 3 can sense RSSI and esti-
mate location using the GPS, IAR is implemented to
improve the robustness of multi-hop networking un-
der several conditions that may occur in sports scenes.
2.2 Visual Human Detection
The primary purpose of IAR is to actualize real-time
vital sensing of humans during exercise, where the
locations of sensor nodes are estimated as the loca-
tions of the humans wearing them. Here, a sensor
Testing Environment for Developing a Wireless Networking System based on Image-assisted Routing for Sports Applications
139
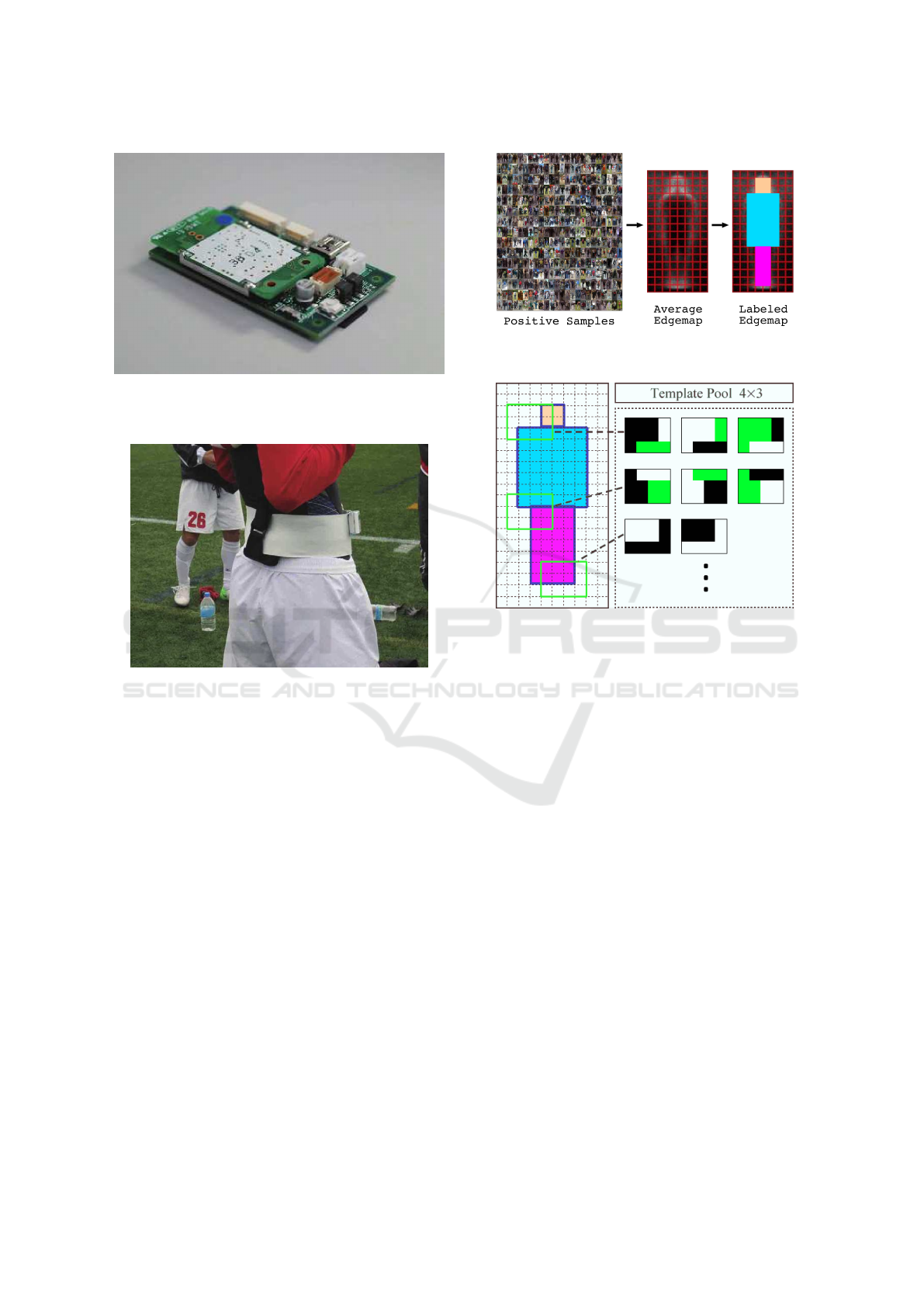
Figure 3: Sensor nodes for real-time vital sensing during
exercises.
Figure 4: Attaching a sensor node to a human doing exer-
cise.
node is attached, as illustrated in Figure 4. The chal-
lenge of localizing target humans in an image can be
addressed by adopting visual object detectors widely
used in several computer vision applications. The
YOLO series (Redmon and Farhadi, 2017; Redmon
and Farhadi, 2018), RetinaNet (Lin et al., 2017), and
EfficientDet (Tan et al., 2020) are advanced schemes
based on deep neural networks, with excellent perfor-
mance in detecting target objects from an image.
In addition, a traditional detection scheme com-
prising handcrafted features and boosting also ex-
hibits adequate accuracy for human detection in
sports scenes (Oki et al., 2019b; Oki et al., 2019a)
because humans should be easier detected from back-
ground images than generic cases.
We adopt informed-filters, which are one of the
most accurate schemes for human detection among
the schemes with handcrafted features. This scheme
achieves both accurate detection and fast processing
by feature design, according to the average edge map
obtained from training samples, as illustrated in Fig-
ures 5 and 6. The processing speed of this scheme can
Figure 5: Edgemap generation.
Figure 6: Template generation.
be improved with the parallel application of a GPU
and an FPGA. The aforementioned advantages of this
scheme are suitable for the real-time processing of
IAR in sports scenes.
2.3 Visual Human Tracking to Estimate
a Target’s ID
Accurate human detection from sports scenes can
be realized by utilizing a detector constructed with
informed-filters. However, IAR requires human iden-
tification when several humans need to be monitored
by the proposed vital sensing system. Although sev-
eral approaches can be applied to the identification
of target humans, tracking over several frames of in-
put images is applied for this purpose in the proposed
scheme. This task is called visual target tracking or
visual object tracking in the field of computer vision,
where the family of Kalman and particle filters play a
significant role. KCF(Henriques et al., 2015), which
does not utilizes time-series filters, instead of image
correspondence over frames, has recently garnered re-
markable attention.
Several approaches have been proposed for this
task; however, we have selected a simpler approach
because relatively accurate detection results can be
icSPORTS 2021 - 9th International Conference on Sport Sciences Research and Technology Support
140

Figure 7: Overview of the proposed testing environment.
obtained by a detector in the sports scenes that we
tested (Oki et al., 2019a). This simple approach solely
associates detection results in the current frame with
those of previous frames. Remarkably, this approach
exhibited optimal accuracy, and became effective in
some test scenes with the application of error correc-
tion based on color information (Aoki et al., 2020).
Tracking-based identification is beneficial when all
IDs obtained via the detection and tracking processes
are assigned to the IDs of the sensor nodes used in
wireless networking. The correct assignment of IDs
can be obtained when the target humans line up ac-
cording to the IDs of the sensor nodes attached to
them before starting vital sensing during exercises.
3 TESTING ENVIRONMENT FOR
DEVELOPING A
WIRELESS-NETWORKING
SYSTEM BASED ON
IMAGE-ASSITED ROUTING
FOR SPORTS APPLICATIONS
This section proposes a testing environment for mul-
tihop wireless networking based on IAR, where the
location of sensor nodes is estimated via visual infor-
mation.
3.1 Overview of the Testing
Environment
Figure 7 presents an overview of the proposed testing
environment. In this testing system, the locations of
sensor nodes with AR markers are determined in real
time using a video sequence captured from a USB
camera, and they are sent to the control software of
a base station at runtime. This real-time localization
mechanism of sensor nodes using input images en-
ables the development and verification of a dynamic
routing system based on IAR.
Figure 8: Example of a JSON file that contains locations of
sensor nodes estimated by a USB camera.
3.2 AR Marker Detection
In an actual system based on IAR, the locations of
sensor nodes are estimated via human detection and
tracking using a video sequence obtained by a cam-
era mounted on a drone. However, it is expensive to
verify the networking system based on IAR using a
video sequence captured by a drone, because several
target humans in the sports field where a drone can
fly become indispensable. Therefore, a more com-
pact system is required to verify the basic functions
of IAR, especially in terms of the dynamic update of
routing information according to the results of the lo-
calization based on image processing. Accordingly,
we decided to attach an AR maker to a sensor node
and provide locations of sensor nodes to control the
software of a base station that manages the dynamic
routing of sensor nodes.
To verify the basic functions of the wireless net-
working based on IAR, AR markers are attached
to sensor nodes, which can be accurately obtained
using image sequences provided by a USB cam-
era. To generate and detect AR markers, the ArUco
marker (J.Romero-Ramirez et al., 2018; Garrido-
Jurado et al., 2016) used in the OpenCV library was
adopted. This library can drastically reduce the im-
plementation cost of AR marker detectors.
3.3 System Implementation
JSON file is adopted as the interface to control the
software of the base station. The locations of the sen-
sor nodes are written to a JSON file, and the control
software of the base station reads the node locations
from the file. Figure 8 presents an example of a JSON
file that contains node locations obtained via image
processing. The dynamic update of routing informa-
Testing Environment for Developing a Wireless Networking System based on Image-assisted Routing for Sports Applications
141

tion becomes feasible when the control software of
the base station reads the current locations of the sen-
sor nodes after their updates. In actual cases, the cur-
rent locations of sensor nodes are determined by hu-
man detection and tracking using a video sequence
obtained from a camera mounted on a drone.
To verify the combined application of the image-
based localization and dynamic update of routing in-
formation using the control software, a software in-
terface for localizing sensor nodes using AR markers
to the control software is designed to be identical to
the actual one. This implementation does not require
any modification to the control software; instead, it
solely requires the implementation of the localization
based on AR markers with an identical interface. Via
the organization of this testing environment, the ef-
fective development of the novel sensor networking
algorithm and system becomes feasible.
4 EVALUATION
This section evaluates the proposed testing environ-
ment according to the following procedures:
1. Identical ID assignment of sensor nodes in the
control software and image-based localization,
2. Manual movement of sensor nodes, and
3. Update of sensor locations in the control software,
according to the movement.
To assign an identical ID to a sensor node in the
control software of the base station and the localiza-
tion software using AR markers, the ID assignment
procedure of the control software that assigns a new
ID to a sensor node when it is switched on, as well as
the sensor nodes, are switched on according to the ID
of the AR markers attached to them. Accordingly, the
same ID in the control software and image processing
were assigned to a sensor node.
After activating all the sensor nodes, a sensor node
was moved, as illustrated in Figures 9,10, and 11. In
these images, the AR markers corresponding to all
the sensor nodes were accurately detected. Accord-
ingly, appropriate locations and IDs were obtained.
The update rate of the base station’s control software
was significantly less than the frame rate of the USB
camera. Hence, the control software updated the lo-
cations of the sensor nodes after a while, because
the actual movement of the sensor node had finished.
Figure 12 illustrates how the locations of the sensor
nodes were updated according to the movement of
the sensor node. These results indicate that the lo-
cations of sensor nodes determined by a USB camera
can be appropriately assigned to the control software
Figure 9: Before moving.
Figure 10: While moving.
Figure 11: After moving.
Figure 12: After update of locations.
of the base station to manage the routing information
of the sensor nodes. It is evident that the proposed
testing environment enables the algorithm design and
icSPORTS 2021 - 9th International Conference on Sport Sciences Research and Technology Support
142

system development of dynamic routing based on the
sensor locations determined by visual information at
runtime.
5 CONCLUSION
This study proposes a novel testing environment for
developing a novel vital sensing system based on the
IAR of humans during exercises in an outdoor sports
field. The key technology for the vital sensing system
is the dynamic routing of wireless networking among
sensor nodes based on their locations estimated by
computer vision technologies. However, it is difficult
to verify the functions of the networking system us-
ing actual video sequences of several people perform-
ing exercises on the outdoor sports field captured by a
camera mounted on a flying drone at runtime; In ad-
dition, the development of this approach is too expen-
sive. To address this challenge, a compact but effec-
tive system was developed to verify the combined ap-
plication of a control and localization software based
on image processing. The proposed system adopts
AR markers to determine the locations and IDs of
sensor nodes and provide locations of sensor nodes
to the control software in real time. The experimental
results of actual sensor nodes with AR markers indi-
cate that the locations of sensor nodes obtained using
a USB camera could be appropriately assigned to the
control software of the base station to manage routing
information.
ACKNOWLEDGEMENTS
The research results have been partly achieved by
“Research and development of Innovative Network
Technologies to Create the Future”, the Commis-
sioned Research of National Institute of Information
and Communications Technology (NICT), JAPAN.
REFERENCES
Aoki, R., Oki, T., and Miyamoto, R. (2020). Accuracy
improvement of human tracking in aerial images us-
ing error correction based on color information. In
Proceedings of the 9th International Conference on
Software and Computer Applications, ICSCA 2020,
Langkawi, Malaysia, February 18-21, 2020, pages
124–128. ACM.
Garrido-Jurado, S., Salinas, R. M., Madrid-Cuevas, F., and
Medina-Carnicer, R. (2016). Generation of fiducial
marker dictionaries using mixed integer linear pro-
gramming. Pattern Recognition, 51:481–491.
Hamagami, T., Hara, S., Kawamoto, Y., Yomo, H.,
Miyamoto, R., and Okuhata, H. (2020). Summary
of experimental results on accurate wireless sensing
system for a group of exercisers spread in an out-
door ground. In 14th International Symposium on
Medical Information Communication Technology, IS-
MICT 2020, Nara, Japan, May 20-22, 2020, pages 1–
4. IEEE.
Hara, S., Hamagami, T., Kawamoto, Y., Yomo, H.,
Miyamoto, R., and Okuhata, H. (2020). An adaptive
superframe change in a wireless vital sensor network
for a group of outdoor exercisers. In 92nd IEEE Ve-
hicular Technology Conference, VTC Fall 2020, Victo-
ria, BC, Canada, November 18 - December 16, 2020,
pages 1–6. IEEE.
Hara, S., Yomo, H., Miyamoto, R., Kawamoto, Y., Okuhata,
H., Kawabata, T., and Nakamura, H. (2017). Chal-
lenges in Real-Time Vital Signs Monitoring for Per-
sons during Exercises. International Journal of Wire-
less Information Networks, 24:91–108.
Henriques, J. F., Caseiro, R., Martins, P., and Batista, J.
(2015). High-speed tracking with kernelized corre-
lation filters. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 37:583–596.
J.Romero-Ramirez, F., Mu
˜
noz-Salinas, R., and Medina-
Carnicer, R. (2018). Speeded up detection of squared
fiducial markers. Image and Vision Computing,
76:38–47.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In Proc.
IEEE Int. Conf. Comput. Vis., pages 2980–2988.
Miyamoto, R. and Oki, T. (2016). Soccer Player Detection
with Only Color Features Selected Using Informed
Haar-like Features. In Advanced Concepts for Intel-
ligent Vision Systems, volume 10016 of Lecture Notes
in Computer Science, pages 238–249.
Oki, T., Aoki, R., Kobayashi, S., Miyamoto, R., Yomo, H.,
and Hara, S. (2019a). Vision-based detection of hu-
mans on the ground from actual aerial images by in-
formed filters using only color features. In Proc. Inter-
national Conference on Sport Sciences Research and
Technology Support, pages 84–89. ScitePress.
Oki, T. and Miyamoto, R. (2017). Efficient GPU imple-
mentation of informed-filters for fast computation. In
Image and Video Technology, pages 302–313.
Oki, T., Miyamoto, R., Yomo, H., and Hara, S. (2019b).
Detection accuracy of soccer players in aerial images
captured from several viewpoints. Journal of Func-
tional Morphology and Kinesiology, 4(1).
Redmon, J. and Farhadi, A. (2017). YOLO9000: better,
faster, stronger. In Proc. IEEE Conf. Comput. Vis. Pat-
tern Recognit., pages 6517–6525.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. CoRR, abs/1804.02767.
Tan, M., Pang, R., and Le, Q. V. (2020). Efficientdet: Scal-
able and efficient object detection. In Proc. IEEE
Conf. Comput. Vis. Pattern Recognit.
Yokokawa, H., Oki, T., and Miyamoto, R. (2017). Feasi-
bility study of a simple tracking scheme for multiple
objects based on target motions. In Proc. International
Workshop on Smart Info-Media Systems in Asia, pages
293–298.
Testing Environment for Developing a Wireless Networking System based on Image-assisted Routing for Sports Applications
143
