
Touch Detection with Low-cost Visual-based Sensor
Julio Casta
˜
no-Amoros
a
, Pablo Gil
b
and Santiago Puente
c
AUROVA Lab, Computer Science Research Institute, University of Alicante, Alicante 03690, Spain
Keywords:
Tactile Sensing, Robotic Grasping, DIGIT Sensor, Convolutional Neural Networks.
Abstract:
Robotic manipulation continues being an unsolved problem. It involves many complex aspects, for example,
perception tactile of different objects and materials, grasping control to plan the robotic hand pose, etc. Most
of previous works on this topic used expensive sensors. This fact makes difficult the application in the industry.
In this work, we propose a grip detection system using a low-cost visual-based tactile sensor known as DIGIT,
mounted on a ROBOTIQ gripper 2F-140. We proved that a Deep Convolutional Network is able to detect
contact or no contact. Capturing almost 12000 images with contact and no contact from different objects, we
achieve 99% accuracy with never seen samples, in the best scenario. As a result, this system will allow us to
implement a grasping controller for the gripper.
1 INTRODUCTION
Tactile perception is becoming more and more essen-
tial in robotic manipulation tasks as shown in (Kap-
passov et al., 2015) and (Li et al., 2020). Touch data
are often used to obtain information about manipu-
lated objects such as shape, rigidity or texture of the
material (Luo et al., 2017). This can be used for ob-
ject recognition tasks, when visual information from
eye-to-hand systems is not sufficient for a successful
recognition.
Besides, touch data can be used to adapt the ob-
ject grasping by correcting the opening or closing of
the robotic hand or gripper (Delgado Rodr
´
ıguez et al.,
2017). Sometimes, it is used to plan finger move-
ments in order to ensure a better grasp (Calandra et al.,
2018), avoiding slipping or falling of the manipulated
objects.
With the aim of controlling the gripper opening,
or making a stable grasp with a robotic hand, state of
art works showed methods based on machine learn-
ing techniques (Cockbum et al., 2017) and (Bekiroglu
et al., 2011). Later, other methods used deep learning
techniques (Kwiatkowski et al., 2017) and (Ni et al.,
2019). Both types of approaches rely on the tactile
sensor technology. A review of tactile technologies
can be found in (Yi et al., 2018). They can be piezo-
resistive, capacitive, optical, magnetic, with baromet-
a
https://orcid.org/0000-0001-9789-1628
b
https://orcid.org/0000-0001-9288-0161
c
https://orcid.org/0000-0002-6175-600X
ric transducers, etc. Therefore, the neural architec-
tures proposed to solve this problem are very differ-
ent. For example, in (Zapata-Impata et al., 2018), a
simple Convolutional Neural Network (CNN) is de-
signed to detect stability in a virtual tactile image
created from the electrode values of a BioTac sensor
SP. This virtual tactile image was used to represent
the connectivity among neighboring electrodes. In
(Garcia-Garcia et al., 2019), a Graph Convolutional
Network (GCN) was created to avoid building an in-
termediate representation like a virtual tactile image.
GCN also keeps the connectivity among neighbors.
The results of both methodologies were compared in
(Zapata-Impata et al., 2019).
In this work, we present a first approach for the
detection of tactile contact between the robot and ob-
ject. We plan to use it as a part of a controller that al-
lows the robot to manipulate an object in-hand with-
out slipping. To do this, we used a novel low-cost
visual-based tactile sensor known as DIGIT (Lambeta
et al., 2020), instead of BioTac SP. DIGIT is based on
an optical image whereas BioTac SP is based on baro-
metric transducers, and is much more expensive.
This paper is organised as follows: first, we will
describe the robotic grasping system consisting of
a gripper with DIGIT tactile sensors mounted on
the parallel fingertips. Second, we will present our
methodology for contact detection with DIGIT sen-
sor and artificial intelligence. Finally, we will show
our results and conclusions, as well as future works.
136
Castaño-Amoros, J., Gil, P. and Puente, S.
Touch Detection with Low-cost Visual-based Sensor.
DOI: 10.5220/0010699800003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 136-142
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 ROBOTIC GRASPING SYSTEM
2.1 Visual-based Tactile Sensor
Robots need touch sensing to achieve human manip-
ulation. In recent years, different types of tactile sen-
sors have been used for this purpose. A game changer
in robotic perception are tactile sensors based on vi-
sual technology such as Gelsight (Yuan et al., 2017),
Gelslim (Donlon et al., 2018) or DIGIT. DIGIT is a
sensor whose physical structure consists of an elas-
tomer (which can be transparent, reflective or with
markers), an acrylic window, a PCB camera, a PCB
lighting, and a housing of several pieces that can be
easily manufactured with a 3D printer. The camera
captures up to 60 fps of colored images with a resolu-
tion of 240x320 pixels. Contact with the DIGIT im-
plies deformation of the elastomer. This shape mod-
ification changes the way light travels from the elas-
tomer to the camera. And so the image will be differ-
ent as seen in Figure 3.
In this work, we built three units of DIGIT sensor
(A, B and C). All the sensors were built with reflec-
tive elastomers without markers. Since sensors as-
sembling is manual, it is almost impossible to apply
the same quantity of paint and hardness in their manu-
facturing, which influences the elastomer’s deforma-
tion. Besides, PETG material was used to print the
housing.
2.2 Gripper System
We mounted a DIGIT sensor on each fingertip of a
ROBOTIQ gripper 2F-140. This gripper has two ar-
ticulated fingers with two joints on each one of them.
The fingers are under-actuated. Therefore, they can
adapt to the object’s shape during grasping tasks. The
gripper can do internal and external grasps. As we
mounted the sensors in the internal face of the finger-
tips, our gripper performs external grasping. Other-
wise, the grasping would be internal.
We designed and built an additional piece, in
PETG material, to attach each sensor to each finger-
tip. Both devices, gripper and sensors, are connected
using a serial communication protocol to a PC and
controlled with Robot Operative System (ROS) Ki-
netic Kame. The gripper can be controlled in po-
sition, velocity and force. The gripper’s operation
mode allows us to detect contact between an object
and the fingers. This mode works measuring the am-
perage, and comparing it with a pre-recorded refer-
ence. Nonetheless, we discarded this mode because
each object has a different reference amperage. Then,
measuring a new reference amperage value is needed
every time we use a new object. In contrast, us-
ing DIGIT sensors, different objects produce similar
shapes during the contact, hence, it is easier to gen-
eralise when using new objects. In this paper, we
present a contact detection method based on the tac-
tile image provided by DIGIT sensors.
Figure 1: Gripper system.
3 SUPERVISED LEARNING
METHODOLOGY
In this work, we did several experiments with classi-
cal computer vision and machine learning techniques,
for example, finding contours in the contact area, de-
tecting feature’s movement using Optical Flow, or di-
mensionality reduction by means of Principal Com-
ponent Analysis. However, DIGIT images are very
noisy due to the merge of colours. We had to discard
these methods because they could not extract good
features from the images, and the results were not ro-
bust.
As our objective was to achieve contact detection
with a wide panel of household objects, we chose to
focus on deep learning methods. Indeed, we knew
that those methods were capable of learning from im-
age features. Working with images, we decided to
focus on CNNs. They are capable of extracting fea-
tures thanks to convolutional method and filters ap-
plied through different layers.
Touch Detection with Low-cost Visual-based Sensor
137

3.1 Neural Architecture
We are facing a binary classification task: contact or
no contact between an object and the sensor. The neu-
ral architecture is composed of a backbone for fea-
ture extraction, fully connected layers, a final classi-
fier with one neuron and a sigmoid as activation func-
tion.
To find the optimal backbone that allows us to
detect tactile contact, we use three different mod-
els: VGG19 (Simonyan and Zisserman, 2014), Incep-
tionV3 (Szegedy et al., 2016) and MobileNetV2 (San-
dler et al., 2018). Using every existing backbone is
impossible, so we analysed the performance of three
models with different characteristics such as depth,
inference, training time, size, etc.
VGG19 architecture contains only 19 layers with
3x3 standard convolution filters, max pooling layers,
and a pair of fully connected layers at the end.
Unlike VGG19, InceptionV3 has a more complex
architecture. The most important part of its architec-
ture is the use of inception blocks, which apply con-
volutions changing the kernel’s size to extract features
with different levels of detail.
MobileNetV2 was designed to be executed in mo-
bile devices. Thus, the authors created a model with
as fewer parameters and mathematical operations as
possible. This CNN shows the good performance of
depthwise separable convolutions in accuracy and ef-
ficiency.
To evaluate the performance, we also applied a
batch normalisation process as well as dropout tech-
nique, except for MobileNetV2, in which we only cre-
ate the classifier.
Figure 2: Neural architecture.
3.2 Tactile Data Collection
We assembled three DIGIT sensors following the in-
structions shown in (Lambeta et al., 2020). Each
sensor provides a slightly different output image as
shown in Figure 3, due to a manual assembly. In this
article, we made a dataset with images from each sen-
sor, and we trained each model described in afore-
mentioned section.
To create the dataset, we used different objects
such as shoe soles, air freshener, tennis ball, shampoo
bottle, chips can, etc, (see Figure 4). This dataset is
made up of two classes: contact and no contact. Both
classes have approximately the same number of sam-
ples: 8200. Contact class contains 40% images from
sensor A, 30% images from sensor B and 30% from
sensor C, whilst no contact class contains 43% im-
ages from sensor A, 25% images from sensor B and
32% from sensor C. The number of samples from sen-
sor A is higher because its gel has difficulties recov-
ering its initial shape and colours after the contact.
Background colours change more often in this sen-
sor. Therefore, adding as many background images
as possible from this sensor will help the model to
learn correctly.
To make the model more robust, we need to record
contact data varying forces and shapes. Hence, the
model will be able to detect any kind of contact. Be-
sides, recording data when the object is releasing the
sensor and the gel is recovering its initial shape in-
creases model’s robustness.
4 EXPERIMENTATION
In this paper, we used a NVIDIA DGX A100 plat-
form for training. All the experimentation is coded in
Python 3.7.2, Keras 2.4.0 and Tensorflow 2.4.1. For
inference, we used an i5-8400 CPU @ 2.8Ghz, 16
GIB DDR4 RAM.
4.1 Training Methodology
We performed a hyperparametric fine-tunning
throughout the training phase of the neural archi-
tectures. Thus, we could choose a set of optimal
hyperparameters for each CNN.
Note that, we split our data into three subsets:
train (70%), validation (20%) and test (10%). Data
were randomly chosen, ensuring that there were no
identical samples in training, validation and test. It
was not necessary to apply any kind of cross valida-
tion.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
138
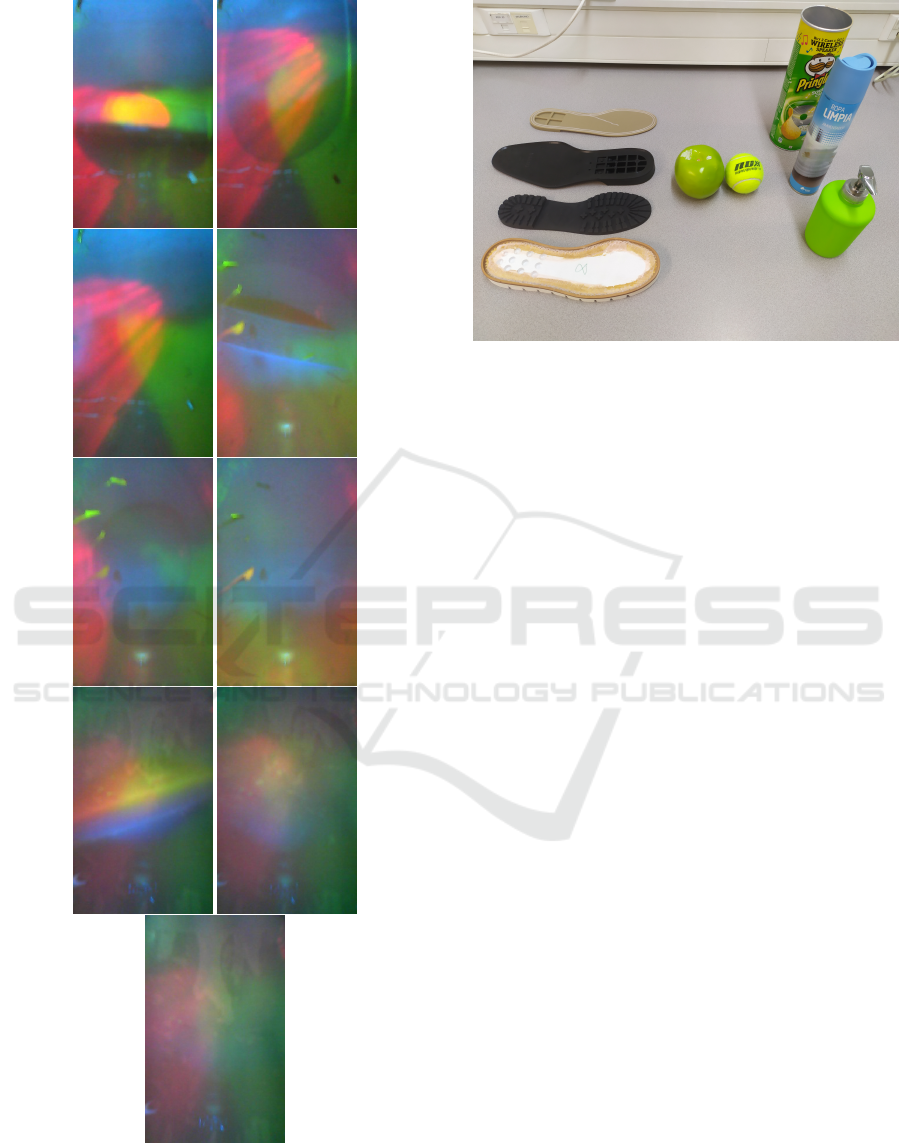
Figure 3: Sensor A, B and C (top to bottom), contact image
(shoe sole), contact image (plastic apple) and no contact im-
age (left to right).
Figure 4: Objects used to create the dataset.
We applied data augmentation to increase the size
of data used for successful tunning of the training
models. To do it, in particular, we used different trans-
formations of input image, such as 0.2 zoom range, 5°
rotation range and horizontal flip.
Starting with VGG19 backbone, this model was
trained several times to verify which approach is
better among training from scratch, with transfer-
learning or using all the pre-trained parameters from
ImageNet (Deng et al., 2009). The results showed
that training VGG19 freezing only the first six lay-
ers and unfreezing the rest, achieved the highest met-
rics. In respect of the hyperparameters, we used a 32
batch size, binary crossentropy loss, Adam optimizer
with 1e-6 learning rate, and relu function in fully con-
nected layers.
In InceptionV3’s training, we insisted in doing
transfer-learning due to the best results in the previ-
ous backbone. Thus, we froze all the layers until layer
number 249, and we unfroze the rest. We changed the
batch size from 32 in VGG19 training to 128 because
InceptionV3 trains faster than VGG19, and used to
overfit. We used relu function and binary crossen-
tropy again, but we changed Adam for RMSprop with
learning rate 1e-5 because InceptionV3 was designed
to be optimal with RMSprop.
In addition, we repeated transfer-learning strategy
with MobileNetV2, freezing only the first four layers.
We used 64 batch size, binary crossentropy loss and
RMSprop optimizer with 1e-5 learning rate.
As we did several training changing dropout val-
ues, the number of epochs varies for each dropout val-
ues. Nonetheless, the best results were achieved (see
Table 1) with 100 epochs for VGG19 backbone, and
10 epochs for InceptionV3 and MobileNetV2.
Touch Detection with Low-cost Visual-based Sensor
139

4.2 Detection Results
In this article, we did two experiments. The first
one consisted in training three different models, us-
ing the CNN that we mentioned in section 3.1, apply-
ing different dropout values. This helps us to know
which CNN gets better results and, also, this experi-
ment shows that our models are not overfitting during
training. We also measured the average inference time
with the same test set, 1644 (10%) samples from all
the sensors (A, B, and C) (see Table 1) .
Table 1: Accuracy (Acc), Precision (P), Recall (R) and Av-
erage Inference Time (Time) from the test results of the
CNN with each backbone.
Backbone Acc P R Time
V GG19 99.9% 99.8% 100% 140ms
Inception 99.7% 99.5% 100% 90ms
MobileNet 98.1% 97.3% 98.9% 70ms
As can be seen in Table 2, the results are re-
ally promising. Everything indicates that it is pos-
sible to keep good performance even if we increase
the training grasping dataset size looking for a bet-
ter generalisation of the neural models. Although
all the results are similar, VGG19 and InceptionV3
achieve better percentages than MobileNetV2. This
happens because MobileNetV2 loses performance in
order to achieve an extremely low inference time. Be-
sides, VGG19 is slower than InceptionV3 and Mo-
bileNetV2, both in training and inference time.
The second and last experiment we carried out al-
lows us to see how well our models are generalis-
ing among sensors. In the previous experiment, we
trained the neural models with data from all the sen-
sors (see Figure 3), so we know our models work fine
in this case. Now, we want to see if the neural mod-
els can generalise from one sensor and detect contact
using another sensor. This point is very interesting to
help us analyse the model’s behaviour in case the sen-
sor unit breaks and has to be replaced by another one
- which can be common in low-cost sensors.
Therefore, the idea is to train two models for the
sensor units A and B. To do so, model A is trained
only with data from sensor A (6186 samples) and
model B is trained with data from sensor B (4367).
Then, we test model A with a test set from sensor A
(687) and another test from sensor B (436). We re-
peat the process with sensor B. Results can be seen in
Figure 5.
Later, we train another model with data from sen-
sors A and B (6186,4367) and we test it with a new
test set from sensors A and B. This process is repeated
for each CNN (see Figure 6). Finally, a third model
Figure 5: Test results by training model A and B separately.
is trained with data from sensors A, B, and C.
Testing results are shown in Table 1.
Figure 6: Test results by training model A and B with data
from sensors A and B.
As can be seen in Figure 6 and Table 1, adding
samples from different units of DIGIT sensor helps
the system to generalise better. Thus, it is possi-
ble to increase CNN’s performance by manufacturing
more sensors and adding their images to the training
dataset.
Taking into account the results of both experi-
ments, InceptionV3 backbone is the best option to
choose. Although VGG19’s and InceptionV3’s met-
rics are almost identical, InceptionV3’s inference and
training time are much better than VGG19’s.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
140

Table 2: VGG19, InceptionV3 and MobileNetV2 metrics for each dropout values.
Backbone
Dropout values
No dropout 0.3 0.4 0.5 0.6
VGG
- 99.26 - 99.94 - Accuracy (%)
- 98.55 - 99.88 - Precision (%)
- 100 - 100 - Recall (%)
- 99.27 - 99.94 - F1 score (%)
Inception
- - 99.70 - 99.75 Accuracy (%)
- - 99.39 - 99.51 Precision (%)
- - 100 - 100 Recall (%)
- - 99.69 - 99.76 F1 score (%)
MobileNet
98.10 - - - - Accuracy (%)
97.35 - - - - Precision (%)
98.90 - - - - Recall (%)
98.12 - - - - F1 score (%)
5 CONCLUSIONS AND FUTURE
WORKS
In this paper, we proved that high accuracy grip de-
tection task could be achieved using low-cost visual-
based tactile sensors, and a CNN. Although it is dif-
ficult to generalise among sensors, better generalisa-
tion could be achieved through sensor’s industrialisa-
tion. Nonetheless, we keep working on improving the
manual manufacturing, and assembling of DIGIT sen-
sor units. Manufacturing improvements allow sensor
images to be more alike, which will improve model
generalisation.
Now, we plan to develop a grasp, hold, release
and slip detection system using these results and a
LSTM neural network. Implementing a robotic grasp-
ing controller is our goal (see Figure 7). Results are
shown in this video: https://youtu.be/TxoR9Xm1pcI
Figure 7: Grasping controller.
ACKNOWLEDGEMENTS
Research work was completely funded by the Eu-
ropean Commission and FEDER through the COM-
MANDIA project (SOE2/P1/F0638), supported by
Interreg-V Sudoe. Computer facilities used were pro-
vided by Valencia Government and FEDER through
the IDIFEDER/2020/003.
REFERENCES
Bekiroglu, Y., Laaksonen, J., Jorgensen, J. A., Kyrki, V.,
and Kragic, D. (2011). Assessing grasp stability based
on learning and haptic data. IEEE Transactions on
Robotics, 27(3):616–629.
Calandra, R., Owens, A., Jayaraman, D., Lin, J., Yuan, W.,
Malik, J., Adelson, E. H., and Levine, S. (2018). More
than a feeling: Learning to grasp and regrasp using vi-
sion and touch. IEEE Robotics and Automation Let-
ters, 3(4):3300–3307.
Cockbum, D., Roberge, J.-P., Maslyczyk, A., Duchaine, V.,
et al. (2017). Grasp stability assessment through un-
supervised feature learning of tactile images. In 2017
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 2238–2244. IEEE.
Delgado Rodr
´
ıguez,
´
A., Jara, C. A., and Torres, F. (2017).
In-hand recognition and manipulation of elastic ob-
jects using a servo-tactile control strategy.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Donlon, E., Dong, S., Liu, M., Li, J., Adelson, E., and Ro-
driguez, A. (2018). Gelslim: A high-resolution, com-
pact, robust, and calibrated tactile-sensing finger. In
2018 IEEE/RSJ International Conference on Intelli-
Touch Detection with Low-cost Visual-based Sensor
141

gent Robots and Systems (IROS), pages 1927–1934.
IEEE.
Garcia-Garcia, A., Zapata-Impata, B. S., Orts-Escolano, S.,
Gil, P., and Garcia-Rodriguez, J. (2019). Tactilegcn:
A graph convolutional network for predicting grasp
stability with tactile sensors. In 2019 International
Joint Conference on Neural Networks (IJCNN), pages
1–8. IEEE.
Kappassov, Z., Corrales, J.-A., and Perdereau, V. (2015).
Tactile sensing in dexterous robot hands. Robotics and
Autonomous Systems, 74:195–220.
Kwiatkowski, J., Cockburn, D., and Duchaine, V. (2017).
Grasp stability assessment through the fusion of pro-
prioception and tactile signals using convolutional
neural networks. In 2017 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 286–292. IEEE.
Lambeta, M., Chou, P.-W., Tian, S., Yang, B., Maloon,
B., Most, V. R., Stroud, D., Santos, R., Byagowi, A.,
Kammerer, G., et al. (2020). Digit: A novel design for
a low-cost compact high-resolution tactile sensor with
application to in-hand manipulation. IEEE Robotics
and Automation Letters, 5(3):3838–3845.
Li, Q., Kroemer, O., Su, Z., Veiga, F. F., Kaboli, M., and
Ritter, H. J. (2020). A review of tactile information:
Perception and action through touch. IEEE Transac-
tions on Robotics, 36(6):1619–1634.
Luo, S., Bimbo, J., Dahiya, R., and Liu, H. (2017). Robotic
tactile perception of object properties: A review.
Mechatronics, 48:54–67.
Ni, P., Zhang, W., Bai, W., Lin, M., and Cao, Q. (2019).
A new approach based on two-stream cnns for novel
objects grasping in clutter. J. Intell. Robotic Syst.,
94(1):161–177.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L. (2018). Mobilenetv2: Inverted residuals and
linear bottlenecks. in proc. ieee conference on com-
puter vision and pattern recognition.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture.
In European Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Yi, Z., Zhang, Y., and Peters, J. (2018). Biomimetic tactile
sensors and signal processing with spike trains: A re-
view. Sensors and Actuators A: Physical, 269:41–52.
Yuan, W., Dong, S., and Adelson, E. H. (2017). Gelsight:
High-resolution robot tactile sensors for estimating
geometry and force. Sensors, 17(12):2762.
Zapata-Impata, B. S., Gil, P., and Torres, F. (2018). Non-
matrix tactile sensors: How can be exploited their lo-
cal connectivity for predicting grasp stability? arXiv
preprint arXiv:1809.05551.
Zapata-Impata, B. S., Gil, P., and Torres, F. (2019). Tactile-
driven grasp stability and slip prediction. Robotics,
8(4):85.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
142
