
Honeycomb Layout Inspired Motion of Robots for Topological Mapping
Raul F. Santana and George A. P. Th
´
e
Department of Teleinformatics, Federal University of Cear
´
a, Fortaleza, Cear
´
a, Brazil
Keywords:
Robot Swarm, Collaborative Robotics, Mapping, Topological Maps.
Abstract:
Swarm robots are an important area of mobile robotics inspired by the collective behavior of animals for the
execution of activities and, using this premise, the present work aims to present a swarm robotics algorithm
for topological mapping of environments. A comparison was made with another article in the literature that
presents a similar technique, where it was possible to see an improvement in performance in the proposed
parameters. An assessment of closed-loop control was also carried out, using a proposed evaluation metric,
which showed a minor impact with the increase in the number of agents, and in smaller environments.
1 INTRODUCTION
Bioinspired motion of robots swarm aimed at repro-
ducing the behaviour of birds, fish, bees etc has re-
ceived intensive attention lately (Barca and Seker-
cioglu, 2013). The ability to cooperate in coordinated
group tasks opens up a wide range of interesting ap-
plications in the field of logistics (Wen et al., 2018)
and environment exploration (Ramachandran et al.,
2017). Indeed, one of the most basic issue in robotics,
navigation is especially important in unknown scenar-
ios, since it allows for gathering environment infor-
mation in the fundamental task called mapping, as in
SLAM applications (Choset et al., 2005).
Mapping consists of creating spatial models for
the environment from sensor perception and can be
divided into three main categories: geometric, topo-
logical and grid maps. In geometric maps, there are
primitive geometric shapes which rely on parameter
adjustment able to suitably fit the information com-
ing from the sensors. Grid maps, in turn, rely on spa-
tial grid representation for a scene, with an occupancy
probability being associated to the cells; it is a not
scalable alternative, and leads to problems in case of
large environments. Finally, topological maps repre-
sent the environment in the form of nodes and edges
for the free-collision regions, as in Figure 1a, where
each node represents a place of interest, and the edges,
their connections (Akdeniz and Bozma, 2015).
In the literature, a huge amount of works report
on the use of robot swarms in the task of topologi-
cal mapping (Akdeniz and Bozma, 2015; Dirafzoon
et al., 2017). For instance, drones were used in aerial
mapping after earthquakes (da Rosa et al., 2020),
Figure 1: Example of topological map and work issues.
swarms of wheeled-robots mapped industrial ware-
houses (Marjovi et al., 2010) and intelligent vacuum
cleaners were engineered to collectively search for ol-
factory sources in a industrial shed (Marjovi and Mar-
ques, 2011).
In this context, here the topological mapping of
typical indoor scenarios, as the one illustrated in Fig-
ure 1b is addressed from a honeycomb geometry
inspired algorithm for the motion-level decision of
wheeled robots. In the investigation, issues like the
environment size and the existence of position closed-
loop control are discussed and an error metrics for the
quality of the produced maps is proposed.
2 THEORETICAL BACKGROUND
2.1 Depth-first Search
The Depth-First Search algorithm is a routine for ex-
ploring graphs in the form of trees, often used to
Santana, R. and Thé, G.
Honeycomb Layout Inspired Motion of Robots for Topological Mapping.
DOI: 10.5220/0010709600003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 143-149
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
143
search for elements within the tree. The algorithm
starts with choosing an arbitrary node to be the root of
the tree and from it new descending nodes are added
to complete the tree (Skiena, 2020).
The process of adding nodes consists of going
from ancestral nodes to descendants until all descen-
dants have been explored. Once a descendant is cho-
sen to start the exploration, the process of choosing
a new child will be recursive until the last child node
has no more children. Once reached the end of the
branch, the algorithm will return to the closest ances-
tor that still has unexplored children and will choose a
new node to be explored, restarting the cycle. In order
to avoid infinite cycles, each node should be explored
only once, which implies not revisiting an already ex-
plored node, even if it is accessible from another an-
cestral node. The routine comes to an end when there
are no more nodes to explore (Skiena, 2020).
Edges connecting nodes are classified into two
categories in non-directional graphs: tree edges and
back edges. While the edges of the tree link nodes
from ancestor to descendants, the backlinks descen-
dants to ancestors, guaranteeing a return to parent
nodes, so that exploration of other descendants is al-
lowed (Skiena, 2020).
2.2 Spatial Representation
For what concerns the spatial representation in the
navigation simulations reported hereafter, it is to be
mentioned that all the scenarios are in-plane motion
and, as such, a simple description for position and ori-
entation is considered. The approach here adopted is
according to (Craig, 2009), in which the position of a
mobile robot in the scene is given by the vector locat-
ing the origin of frame B respect to the universal coor-
dinate system A, whereas the robot orientation may be
retrieved from the rotation matrix calculated from the
inner-product between unit-vectors of principal axes
relating frames B and A.
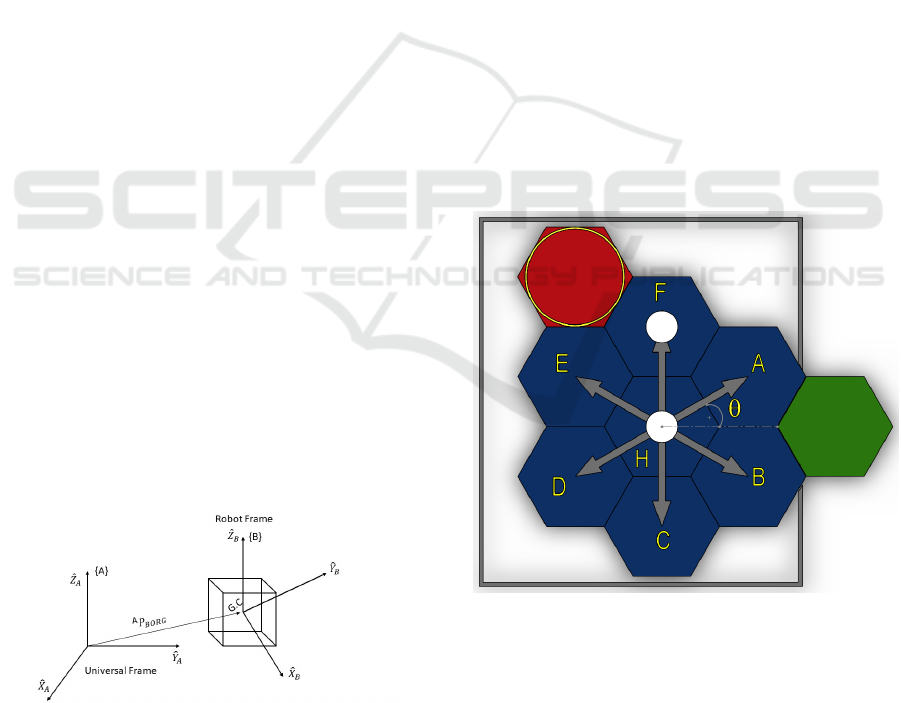
Figure 2: Relative frame description of universal and local
coordinate systems.
3 METHODOLOGY
This section presents in detail the implemented algo-
rithm for topological mapping. It is based on the con-
tribution brought by others in (da Rosa et al., 2020)
in that, the hexagon-like layout of the scene was im-
plemented accordingly, but some improvements have
been made in the motion rules, in the perception of
the neighborhood, in the path planning and movement
control, so that maps are generated more accurately
and efficiently.
n the hexagon-like layout for the scene, robot
scans move in the orthogonal direction to the hexagon
faces, thus limiting motion orientation to the set
30
o
,90
o
, 150
o
, 210
o
, 270
o
, and 330
o
, as shown in Fig-
ure 3. A free node is defined as the hexagon center
when it is empty (no robots occupying) or accessible
without collision (think of other objects in the scene).
In the picture, cells A, B, C, D, E, and F are neighbors
nodes and are accessible from the current position of
the agent (white circle in H cell); the red node is not
in the agent’s neighborhood, being accessible only by
nodes E and F, and the green hexagon is not part of
the map, since its center lies outside the room. It is
a premise that each element of the swarm has access
to its global position and can communicate with other
agents at any time.
Figure 3: Structure of accessible and non-accessible neigh-
boring nodes.
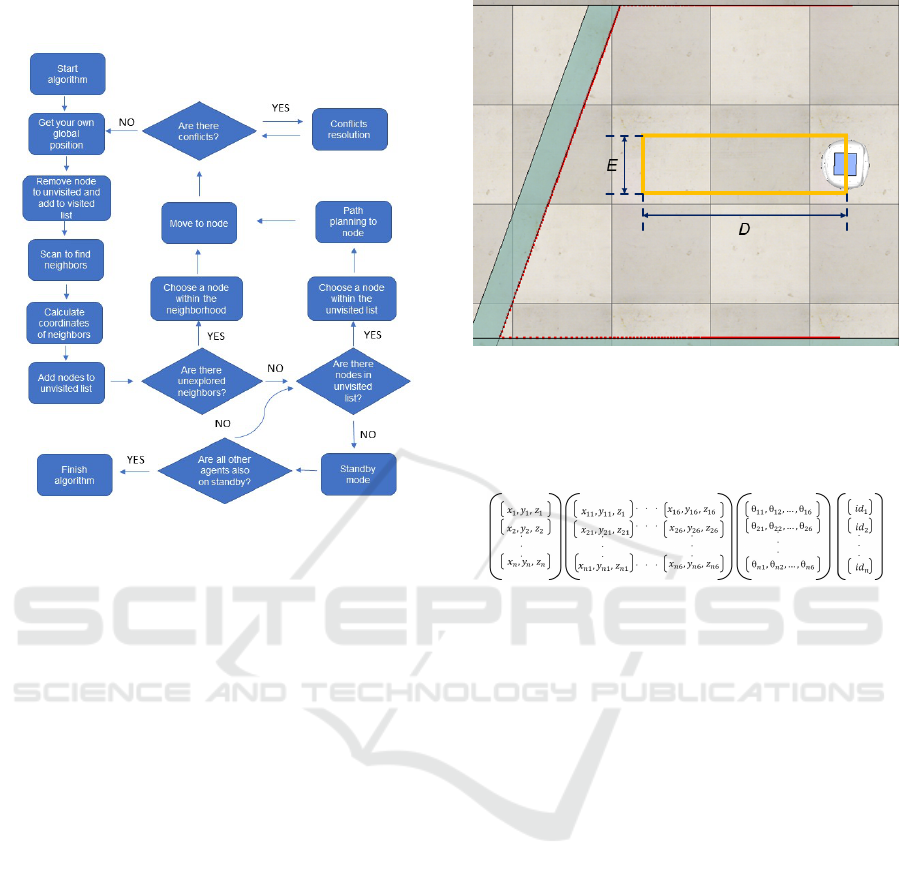
Figure 4 shows the flowchart of the algorithm
used, which is inspired by the depth-first search tech-
nique presented in subsection 2.1, where a branch
must be explored until there are no more unvisited
descendants before exploring a new branch. To do
this, robots share a list of explored nodes and one of
the unexplored nodes, and as a new node is visited, it
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
144
gets inserted into the list of visited nodes and removed
from the list of unvisited nodes.
Figure 4: Flowchart of the mapping algorithm embedded in
robots.
An important equipment in the mapping is the Li-
DAR sensor; indeed, by using it to circularly scan the
environment, new nodes (both neighbors or descen-
dants) can be discovered. Every time a free node is
found and hence available to be visited, its coordi-
nates are computed in a universal frame and inserted
into the list of unvisited nodes and added to the part of
the neighborhood of the current node data struct. Its
orientation comes along. The main reason for choos-
ing the LiDAR sensor was its zone-sensing perception
ability which allows creating, using basic geometric
calculations, a clear safe zone for prompt collision
avoidance. Figure 5 shows the safe zone mentioned in
yellow, while D represents the distance to be moved
and E gives the robot’s diameter. It should be stressed
that these details about the neighborhood perception
and on the choice of LiDAR for safe zone purposes
are missed in the literature.
The map itself is a data structure, as shown Figure
in 6, cointaining the node coordinates, its neighbors,
as well as the orientation and an identification of the
agent that visited the node. At the end of the scan
process, the current node is added to the map. After
that, the robot chooses the next destination to visit,
and will do this into unvisited list, giving preference
to node in it neighborhood. If there no unvisited node
in neighborhood, the robot has two rules to choose:
First In First Out (FIFO) and Euclidian distance. In
the first one, the robot will choose the first node added
Figure 5: Use of the LIDAR sensor and the projected safety
zone.
in unvisited list, while in the second rule, the robot
will choose the node with shorter Euclidian distance
for the current node.
Figure 6: Structure of the map used.
Differently to (da Rosa et al., 2020), in the present
work, the decision rule for motion always favors the
neighbor nodes. Another difference regards the dis-
tance metric which is here dependent on the initial
node position, and not on the robot’s current position
as in (da Rosa et al., 2020).
Once the next objective is clear, a route is de-
fined according to the A* path-planning algorithm,
and the navigation among nodes follows similarly to
what happened in the case of descendant nodes. Such
a repeated process of recalculating movement param-
eters, even in known areas, aims at mitigating the
propagation of position error. As the current map
uses a global coordinates approach, it is more sus-
ceptible to error accumulation than probabilistic ap-
proaches such as (Dirafzoon and Lobaton, 2013; Di-
rafzoon et al., 2014; Dirafzoon et al., 2017). To
cope with that, a PID-controller was implemented for
set-point control at the orientation-level. Parameters
tuning followed Ziegler-Nichols approach, and led to
K
p
= 0.28, K
i
= 0.008 and K
d
= 0.0009.
3.1 Collision Prevention
An important issue in robot navigation, collision
avoidance plays a fundamental role in map generation
from groups of agents. The good news is that the dis-
Honeycomb Layout Inspired Motion of Robots for Topological Mapping
145

cretized nature of the spatial representation allows for
the use of simple rules for preventing multiple node
occupancy and for preventing agents to assume close
goal positions. In the environment exploration, goal
scan be categorized into two types: next objective and
final objective. The first one concerns the adjacent
nodes, whereas the latter is related to a distant cell to
be reached.
A good strategy for collision avoidance required
the agents to have access to others’ objectives in such
a way to properly check in the list of unvisited nodes
about the intention of other agents. A typical collision
situation may occur in a movement to a distant final
objective; in this case, the waypoints can be in the
en-route path of other agents and, to properly prevent
the collision, preference is given to the agent that first
published that node as a next objective.
3.2 Conflict Resolution and Exploration
Completion
The above-mentioned conflict of interests of differ-
ent agents to visit simultaneously a given node is es-
pecially frequent in small-size environments. A way
to deal with that is to define different states for the
agents and to share this information with every other
robot in the task. In the present work, a number of 4
(four) activity modes were defined: standby, explor-
ing, moving, and conflict. Once there is active conflict
detected, the agent is put on standby giving free pas-
sage to the agent which preceded the motion. In the
case the path remains blocked, the agent undergoes
the conflict mode, and passing priority is assigned to
the robot with more free neighbors in its vicinity; the
others, which are in conflict, must wait. This can be
illustrated with the help of Figure 3, in which nodes
A and E are blocked, and the robot occupying node
Hmust leave its location, since it has free neighbors
B, C, and D. At the end of that node access negoti-
ation, the objectives must be recalculated and, if the
conflict persists, the process goes to new rounds until
no conflict is left.
The standby mode is also assumed when the ex-
ploration is completed (meaning that no nodes in the
unvisited list are left). In this case, the robots wait
collectively for the activation of standby mode of ev-
ery other in the group. Only in that condition, the
algorithm reaches completion. Finally, to be stressed
that a robot enters standby mode does not prevent new
conflicts to arise; hence, the standby mode does not
exempt the robot to act to solve them by giving a free
pass to other agents.
4 RESULTS
Aiming at bringing new contributions to the state of
the art, in this section, the discussion focuses on the
quality of the map, an issue that has been neglected
in the recent literature. The study comprehends sim-
ulations done in CoppeliaSim Software, which is an
integrated development environment for simulations
of factory automation systems and robotics based on
a distributed control architecture. It supports devel-
opment through application interfaces for many pro-
gramming languages including Python, which was
used in the present work. A number of up to 3 (three)
Khepera III model robots were used, equipped with
the LiDAR sensor, which covered an area of nearly
100 m
2
defined by 0.5 meters-spaced hexagon-like
cells, with Euclidean distance based exploration rule.
4.1 Preliminar Evaluation
Figure 7: Modeled scenario for validation of the algorithm
and its respective map.
Figure 8: Zoom view of the modeled scenario, with its re-
spective map.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
146

Figure 7 shows the first modeled environment and
its respective map, with the color information repre-
senting the visitation frequency as a heat map accord-
ing to the scale shown in the right side. The pic-
ture shows very good coverage of the environment.
In its expanded view, in Figure 7, it is possible to
see no overlap between obstacles and centers of cells;
in addition, there are no edges connecting neighbor-
ing nodes with obstacles between them, which may
indicate an absence of collision with them. On the
other hand, the map brings small overlaps between the
hexagons, which implies that we have different posi-
tions from those initially idealized, a fact that moti-
vated the upcoming discussion of movement control.
4.2 Comparison with the Literature
To provide a fair comparison to paper (da Rosa et al.,
2020), this part of the study relies on the the amount
of steps needed to carry out the mapping as a met-
ric. Also, preference is given to scenes already inves-
tigated in that paper, which were carefully reproduced
in every detail and are reported in Figure 9.
The bar-graph in Figure 10 presents the results ob-
tained with two and three robots in both scenarios (la-
bel Ref means the literature paper used for benchmark
(da Rosa et al., 2020)). It is possible to notice in the
results of the present work a pattern of reduction of
the number of steps with the increase of the number of
robots, for both scenarios in the FIFO configuration,
constraining the stabilization of the same parameter in
the Euclidean distance configuration. The pattern of
reducing the average number of steps per robot with
increasing them was maintained in both works. The
reference work presented variations for the FIFO and
Euclidean Distance settings of 31.63% and 21.21%,
respectively, for scenario 1, and 25.51% and 12.29%
for the other, while the present work presented vari-
ations of 40%, 33.33%, 40.37% and 33.33% for the
same cases, which represents a greater impact of the
number of robots on the number of steps in the present
algorithm. Also to be mentioned is the absolute num-
ber of steps indicating better efficiency on robots’
motion during the mapping produced by the present
work.
4.3 Evaluation Metrics
A gap found in the reference literature concerns the
evaluation of the quality of the generated topological
map, so one of the contributions of this work is the
introduction of an error metric that allows evaluating
which factors influence the quality of the map built.
It is an adimensional number relying on two terms:
Figure 9: Modeled scenarios for comparison, as introduced
by (da Rosa et al., 2020).
Figure 10: Comparison between models. Label ”Curr”
means this work.
one for the distance between neighboring nodes and
the other, for the angle between them, according to
equation 1. It accounts for the difference between
the threshold, representing the idealized distance be-
tween neighboring nodes, and the actual distance be-
tween the same. Same rationale applies for the orien-
tation. A weighting factor is also considered to allow
for tuning of both aspects (position and orientation);
this way, β = 0 leads to a positioning error metrics,
whereas β = 1 leads to an orientation error metrics.
Anything in between gives a general error metrics en-
compassing both of them and, as such, may be seen
as a figure-of-merit.
error =
∑
((1 − β)
∆Distance
thresholdDist
+ β
∆θ
180
) (1)
4.4 Movement Control Evaluation
As the reader should be aware of, positioning is an
essential task for obtaining good mapping. It is there-
fore important for the robots to have a good position
closed-loop control at the motion level. In this sec-
tion we investigate how the mapping performs with
and without closed-loop control at the motion level.
The investigation also includes the role of the environ-
ment size (from 4 up to 10 meters-side square rooms)
Honeycomb Layout Inspired Motion of Robots for Topological Mapping
147

and the role of amount of agents. The rule for non-
neighbor nodes is based on Euclidean distance with
0.5m separation between cells.
With β = 0.5, Figure 11 brings at a glance a num-
ber of important trends. Firstly, the importance of
closed-loop control; can positively affect the quality
of the maps as measured by the formerly introduced
error metrics. Secondly, it is clear that the larger the
area to cover, the worse the map generated, which
might be speculated to be associated with the need
to compute more displacements among cells in large
environments. This is, however, compensated by the
inclusion of more robots in the task, as it can be seen
in the picture as the amount of robots goes from one
to three. The third conclusion, indeed, somehow sug-
gests that the decrease in the average amount of steps
favors the speculation above. With no great ambi-
tions, we could synthesize the idea of ”the less you
walk, the better the map gets”, thus pointing to the
real benefit of a group and coordinated activity of mo-
bile agents.
Figure 11: Error metrics by environment and by number of
robots.
Moving on, we put light to the map resolution.
To see the the role of the closed-loop control, map-
ping was carried out in a 49 m
2
square-like environ-
ment having three mobile agents, and the size of the
hexagon-cells were modified. The hexagon-inscribed
circle’ diameter ranged from 0.3 to 0.75 meters in this
experiment.
The percentage variation of the error was inves-
tigated in this map-resolution study. Results are
brought in Figure 12, for different values of β. Here,
percentage is calculated as the relation between the
error deviation with-without controller and the error
without controler.
Analyzing the graph, it is possible to see that, for
the most part, the percentage variation of the error is
greater for β = 1, which means a greater difference
between the error related to direction between a plant
that uses and one that does not use a controller, show-
ing that the controller has greater ability to mitigate
this type of error.
Figure 12: Error variation between situations with and with-
out controller, for different offset distances.
We conclude that the presence of a controller is
essential once again to limit the error and provide a
good mapping.
4.5 Influence of Starting Position
Figure 13: Maps generated by robots with changing starting
positions.
To see if and how the robots’ initial position could
affect the map, we assessed the heat map for a given
scene from 3 different initial positions. In Figure 13,
these are indicated with white stars. From each gener-
ated map, in terms of completeness of the swept area,
no relevant differences were observed. It is to be men-
tioned, however, a certain influence of the agents’ ini-
tial position on the incidence of the heat map, where
the nodes of the maps 13c and d had greater traffic on
the left side in comparison to the others. In addition,
it can be observed a higher number of steps per node,
which suggests a correlation between the distribution
of agents on the map with the initial conditions of the
scene, especially in the vicinity of the agents.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
148

5 CONCLUSIONS
In the present work, a robot swarm algorithm for ex-
ploration and topological mapping of environments
was introduced and compared to a recent contribution
of the literature. The study carried out focused on the
quality of the generated maps as measured by a sim-
ple figure-of-merit metric here introduced. It was also
investigated the role of the number of agents, the chal-
lenges posed by the environment size, and the effects
on the close-loop control strategy for robot position-
ing. The analysis revealed that the present implemen-
tation was very efficient in terms of computation steps
when building the maps, which points to a good per-
spective regarding the power consumption of robots.
The discussion on motion close-loop control showed
the importance of relying on it for efficient map gen-
eration and, associated with that, revealed that it ben-
efits hugely as the population of agents grows.
As future work, we suggest the investigation of
new business decision rules for accessing nodes to
visit, to maximize agents’ parallelism, thus reducing
the visitation rates of nodes and maximizing robots
exploration performance.
REFERENCES
Akdeniz, B. C. and Bozma, H. I. (2015). Exploration and
topological map building in unknown environments.
In 2015 IEEE International Conference on Robotics
and Automation (ICRA), pages 1079–1084. IEEE.
Barca, J. C. and Sekercioglu, Y. A. (2013). Swarm robotics
reviewed. Robotica, 31(3):345–359.
Choset, H. M., Hutchinson, S., Lynch, K. M., Kantor, G.,
Burgard, W., Kavraki, L. E., and Thrun, S. (2005).
Principles of robot motion: theory, algorithms, and
implementation. MIT press.
Craig, J. J. (2009). Introduction to robotics: mechanics and
control, 3/E. Pearson Education India.
da Rosa, R., Aurelio Wehrmeister, M., Brito, T., Lima, J. L.,
and Pereira, A. I. P. N. (2020). Honeycomb map: a
bioinspired topological map for indoor search and res-
cue unmanned aerial vehicles. Sensors, 20(3):907.
Dirafzoon, A., Betthauser, J., Schornick, J., Benavides, D.,
and Lobaton, E. (2014). Mapping of unknown en-
vironments using minimal sensing from a stochastic
swarm. In 2014 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pages 3842–3849.
IEEE.
Dirafzoon, A., Bozkurt, A., and Lobaton, E. (2017). A
framework for mapping with biobotic insect networks:
From local to global maps. Robotics and Autonomous
Systems, 88:79–96.
Dirafzoon, A. and Lobaton, E. (2013). Topological map-
ping of unknown environments using an unlocal-
ized robotic swarm. In 2013 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
5545–5551. IEEE.
Marjovi, A. and Marques, L. (2011). Multi-robot olfactory
search in structured environments. Robotics and Au-
tonomous Systems, 59(11):867–881.
Marjovi, A., Nunes, J. G., Marques, L., and de Almeida, A.
(2010). Multi-robot fire searching in unknown envi-
ronment. In Field and Service Robotics, pages 341–
351. Springer.
Ramachandran, R. K., Wilson, S., and Berman, S. (2017).
A probabilistic approach to automated construction of
topological maps using a stochastic robotic swarm.
IEEE Robotics and Automation Letters, 2(2):616–623.
Skiena, S. S. (2020). The algorithm design manual.
Springer International Publishing.
Wen, J., He, L., and Zhu, F. (2018). Swarm robotics con-
trol and communications: imminent challenges for
next generation smart logistics. IEEE Communica-
tions Magazine, 56(7):102–107.
Honeycomb Layout Inspired Motion of Robots for Topological Mapping
149
