
Reconfigurable Scheduling as a Discrete-Event Process:
Monte Carlo Tree Search in Industrial Manufacturing
T. J. Helliwell
1
, B. Morgan
2
, A. Vincent
3
, G. Forgeoux
3
and M. Mahfouf
1
1
Automatic Control & Systems Engineering Department, University of Sheffield, Sheffield, U.K.
2
Advanced Manufacturing Research Center (AMRC), University of Sheffield, Sheffield, U.K.
3
Safran Landing Systems, Gloucester, U.K.
Keywords: Reconfigurable Scheduling, Autonomous Planning, Discrete-Event Systems, Evolutionary Computing,
Generative Models, Manufacturing Systems.
Abstract: In this paper we introduce a theoretical basis for reconfigurable makespan scheduling that is computationally-
efficient and general purpose in manufacturing. A full-scale scale case study for batch production in the
aerospace industry is shown. A knowledge-based Discrete-Event System, based on a Timed Petri Net, is
injected with the initial - current - state and simulated to generate trajectories that represent valid possible
schedules or policies analogous to the Monte-Carlo Tree Search (MCTS) planning algorithm. A new, concise,
evolutionary metaheuristic is proposed called Elitist Trajectory Mutation (ETM) in order to exploit high
performing schedules in localising search and optimisation. The advantage of this approach is
reconfigurability, extensibility and ability to be parallelised to enable satisficing performance for real-time
applications such as intelligent industrial cyber-physical systems scheduling, autonomous control of
distributed systems and active industrial informatics.
INTRODUCTION
Autonomous systems require abilities to discover and
execute rapid planning in or near real-time to exhibit
continuously intelligent control and behavior. Highly
valuable autonomous systems are of a distributed,
discrete-event nature and are characterized
dynamically complex, holonic, chaotic, non-linear
and emergent properties. Markov Decision Processes
(MDP) may be modelled efficiently using Discrete-
Event Systems (DES) [or Discrete-Event Dynamical
Systems (DEDS)] and controlled using event-graphs
or schedules; a powerful, high-level contextual
abstraction.
This paper discusses a Monte-Carlo Tree Search
(MCTS) approach in which autonomous supervisory
agent is embodied with a compositional, knowledge-
based DES model. This is used as a computationally
efficient Markovian representation for discovering
what possible actions are available to a state. The
process is recursive; by inferring what actions
(controlled events) are logically possible (or feasible)
from a given state, and selecting an action, a new state
is generated, time is incremented and this loop is
repeated, generating useful data in a rapid planning
process. This replicates the lookahead process in
Artificial Intelligence (AI) to generate, bifurcate, and
traverse state space trees. However, in this case, time
is modelled explicitly, allowing significant depth –
i.e. planning or scheduling horizons, to be traversed
for search, optimisation and presentation of
controlled system performance, regardless of inherent
combinatorial state explosion.
We show how DES can be used as a ‘scheduling
machine’, modelled using prior knowledge of
deterministic processing time intervals and
dependencies to define a short reconfigurable
scheduling program written in MATLAB
®
. By seeing
a task as a composition of sub-tasks, and using
knowledge of their respective durations and
dependencies, makespan scheduling may be cast as a
stepwise planning problem.
In 1.1 we discuss previous work and claims; 1.2
define contributions and remark on previous claims.
In 2, we show a Timed Petri Net model for a full-scale
industrial case study from aerospace manufacturing
and the search process [i.e. simulation] to generate
trajectories; in 2.5 a new metaheuristic we call Elitist
Trajectory Mutation (ETM) that exploits high-
performing trajectories is described and 3 closes with
Helliwell, T., Morgan, B., Vincent, A., Forgeoux, G. and Mahfouf, M.
Reconfigurable Scheduling as a Discrete-Event Process: Monte Carlo Tree Search in Industrial Manufacturing.
DOI: 10.5220/0010711600003062
In Proceedings of the 2nd International Conference on Innovative Intelligent Industr ial Production and Logistics (IN4PL 2021), pages 151-162
ISBN: 978-989-758-535-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
151

some important observations and extensive
considerations for further work.
1.1 State-of-the-Art
It is necessitated by the subject that previous work
must be considered in discrete sections whilst
retaining a manufacturing perspective; 1) discusses
scheduling in an applied context, the raison d’etre
along with contemporary themes, 2) discusses
scheduling as a mathematical or computational
problem, including Petri Nets and useful
classifications, 3) discusses Discrete-Event System
Simulation (DESS) and finally, 4) identifies broad
fields of inspiration.
1.1.1 Scheduling in Contemporary
Manufacturing
There have been a number of observations on the
significant gap between scheduling theory and
scheduling practice (Maccarthy & Liu, 1993); (Chen
& Shukla, 1996). Scheduling is often a high-level
abstraction of a discrete control or optimization
problem, relating to Systems-of-Systems (SoS)
(Zeigler, Bernard P., Sarjoughian, 2013), Multi-Agent
Systems (MAS) (Ferber, 1999); (Wooldridge, 2009)
and Distributed Systems (DS). Issues include
deficient accuracy (poor prior predictions of task
durations, neglecting inclusion of domain
knowledge) or brittleness of schedules (exogenous
events rendering the schedule infeasible) that
discourage the use of scheduling systems.
(Cowling & Johansson, 2002) noted scheduling
models and algorithms are unable to utilise real-time
information, implying that existing offerings are
exclusively offline and manual. This is in
contravention with the advent of the Cyber-Physical
Systems (CPS) paradigm, and the broader theme of
‘Industrie 4.0’ (Oztemel & Gursev, 2020) that
provides a real-time substrate for machine perception
and environment observation via computer models
and algorithms that enable continuous large-scale
intelligent behaviour through physical control.
The development towards Cyber-Physical
Manufacturing Systems (CPMS) (Váncza &
Monostori, 2017); (Lee, Bagheri, & Kao, 2015)
followed by Autonomous Manufacturing Systems
(AMS) is an international priority since high-
productivity, sustainable (Ambrogio, Guido, Palaia,
& Filice, 2020), adaptive, self-organising, self-
optimising supply chains are in significant
commercial demand (Romero-Silva & Hernández-
López, 2020) and represent the ultimate goal of
contemporary industrial systems.
A connection to the manufacturing system
through a so-called Digital Twin (Feldt, Kourouklis,
Kontny, & Wagenitz, 2020); (Li, Wang, Zhu, & Liu,
2020) which we define as a computer or data model,
provides means to capture or observe the current
actualised state of the system and input it as an initial
state (or initial conditions) of a simulation or planning
system. (Luo, Fang, & Huang, 2015) discussed the
use of Radio Frequency Identification (RFID) with
application to real-time scheduling to enable shop
floor visibility. In regards to real time data acquisition
and ingestion, the paradigm CPMS (Cheng et al.,
2018) demands deployment of high-volume and low-
latency data ‘plumbing’, as mentioned by (Rossit,
Tohmé, & Frutos, 2019) and many others.
1.1.2 Scheduling as a Mathematical and
Computational Problem
(Charpentier & Thomas, 2005) made comments
regarding concept of ‘model reduction’ - a core idea
in Artificial Intelligence - on manufacturing system
scheduling in 2004, whilst literature suggests a sharp
distinction between ‘simulation’ and ‘mathematical
modelling’ approaches.
Automatic generation of schedules without
knowledge is compute-intensive; classically NP-Hard
problem (non-polynomial time class of
computational complexity). The Multiway Number
Partitioning Problem (MNPP) is an example of a NP-
Hard decision problem with well-established solvers
in which a multiset of integers must be partitioned
into a fixed number of subsets, where the sum of
subsets is as equal as possible. This is often cast as
contextually relevant to makespan minimization and
the multiprocessor scheduling problem.
Unfortunately the MNPP exploits what would be
hidden or unactualised information in the case of
choice, dependencies and where processors have
different speeds (also known as task durations).
Brucker & Schelie were one of the first to address
the Flexible Job Shop Scheduling (FJSSP) problem
(Brucker & Schlie, 1990). Although the FJSSP
structure relates to a specific type of manufacturing
system, if tasks are equivalent to jobs, characteristic
features arise - significant dependencies between
tasks, task transformations (or relabelling), variation
in processing duration (or speed) and complex
relations between tasks and resources.
(Chan, Bhagwat, & Chan, 2014) outlined a
methodology for the study of manufacturing system
control with respect to routing flexibility, sequencing
and dispatching rules, and argued that as a systems
flexibility increases, so does the importance of
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
152

optimal decision making. (Tuncel & Bayhan, 2007)
extensively reviewed the application of Petri Nets to
production scheduling. (Baruwa, Piera, & Guasch,
2016) combined Timed Coloured Petri Nets (TCPN)
and a reachability graph Heuristic Search (HS).
Semiconductor fabrication has been a popular
application of manufacturing scheduling problems
featuring re-entrant flows and close integration of
Autonomous Material Handling Systems (AMHS),
where (Ghasemi, Azzouz, Laipple, Kabak, & Heavey,
2020) conducted a recent case study in a Bosch
facility.
(Ouelhadj & Petrovic, 2009)’s work brought
particular clarity to classification of dynamic
scheduling or real-time scheduling problems into
categories of completely reactive, predictive–
reactive and pro-active scheduling.
Reactive scheduling is the dominant approach;
myopic, low-level decentralised production or
dispatching rules; decisions that are inferenced in real
time, forming ‘atomic components’ of a schedule; an
appealing online approach in dynamic scenarios
where uncertainties and disturbances are prolific.
Similarly to this work, the search process results in
the construction of schedules – may be seen as
discovering or training a knowledgebase in the form
of a lookup table, where the engine is a set of states
that are time-indexed with an associated action or
controlled event. The controller is then simply
‘looking up’ by inputting the current time to find the
output action. An immediate weakness (besides the
lack of reconfigurability, i.e. the complete
configuration space must be exhaustively covered by
the engine) is in its general lack of ‘informatics’ or
decision support – it is difficult for users to examine
or interpret the effects of control in a global,
emergent, cumulative system context over time
intervals, nor could it manage a different goal. A
visual representation of system behaviour that is
‘predictive’ or ‘forecasted’ is key deliverable for the
next generation of industrial informatics.
Predictive schedules which take place a priori
(before) or upon the episode start, and cover the bulk
of contemporary research, these constructed methods
are far more computationally demanding on account
of having to manage exploration of state space that is
subject to combinatorial explosion. Hence, they are
reconfigurable insofar as sufficient time is available
for an acceptably high-performing schedule to be
generated.
The third type, to which this work belongs,
predictive-reactive scheduling or
online/dynamic/real-time scheduling, where
classification as real-time is deeply application
specific. Here, the ability to continuously refine or
rapidly re-generate new event-driven control policies
to repair or rapidly reschedule appears; schedules are
revised in response to observed real-time events. The
difficulty is rapidly rediscovering a rule base that is
near-optimal in the ‘space of all rule bases’ when
disturbances potentially render the existing rule-base
invalid. An a recent example of this conventional,
knowledge-free approach is discussed by (Mejía &
Pereira, 2020), using a small case study (Petri Net
structure) and metaheuristic Non-Sorting Genetic
Algorithm (NSGA-II) using a
High-Performance
Computing (HPC) cluster. This again leads us directly
into concerns relating to computational complexity.
1.1.3 Discrete-Event Simulation as a
Surrogate Model for Search and Tree
Generation
(Negahban & Smith, 2014) claimed that Discrete-
Event System Simulation (DESS) is a
“computationally expensive tool”, followed by
(Shiue, Lee, & Su, 2018) regarding multi-pass
simulation as “inappropriate for shop floor control
because it requires intensive computational effort to
select the best scheduling method for each scheduling
period”. (Negahban & Smith, 2014) suggest “the use
of simulation as a basis for real-time system
controller is still a hard task due to the response time,
data collection and aggregation issues”.
An avenue for future work in achieving higher
performance is in Parallel Discrete-Event System
Simulation (PDESS) (Fujimoto, 2016) (Pellegrini &
Quaglia, 2017) research while the broader scientific
community are shifting numerical workloads such as
training Machine Learning (ML) models to an
Graphics Processing Unit (GPU).
1.1.4 Inspirational Background Work
In laying theory for optimization-and-simulation
based scheduling [see (Negahban & Smith, 2014) for
a wide review of manufacturing informatics
applications], inspiration was found in (Ramadge &
Wonham, 1989) that covers early theoretical work
behind DES control, (Sutton & Barto, 2018)’s
Reinforcement Learning (RL) (also covered by
(Bertsekas & Tsitsiklis, 1996)) especially in its use of
the Markov Decision Process (MDP) formalism
(Howard, 1960) to use policies over ‘episodes’ (see
(Dietterich & Zhang, 1995) for early work on
scheduling).
Learning Classifier Systems (LCS) (Butz, 2015)
(Bull, 2015); (Urbanowicz & Moore, 2009) for
automatically discovering interpretable
Reconfigurable Scheduling as a Discrete-Event Process: Monte Carlo Tree Search in Industrial Manufacturing
153

knowledgebases that achieve rule-chaining, efficient
tabular learning and credit assignment. We also note
similarities between this work and Temporal Logic or
Tense Logic; a system of rules for representing and
reasoning about propositions qualified in terms of
time, and introduces a concept of branching time
independently replicated here. A final observation is
that Petri Net structures are similar to the Recurrent
Neural Network (RNN)(Sepp & Jurgen, 1997) in that
once instantiated, models systematically allow
persistence of data, constraining dimensionality in
temporally dynamic behaviour.
1.2 Contribution & Claims
It has been observed that in many scheduling
problems that relate to real systems retain a similar
structure in that the task types and duration observed
are consistent and deterministic, only the state data
(e.g. number of tasks, resource configurations, etc)
and the definition of the objective function [a
generalised term for optimal behaviour] change over
episode instances. In order to exploit this,
reconfigurability has been a principal research
objective – the scheduling problem changes; a
reconfigurable scheduling system can react to this
change by adjusting system parameters and structure
- a framework which has the capability to solve
scheduling problems in the same universe of
discourse by serving all possible state configurations
with minor added complexity.
The most interesting prospect to commercial
industry that keep developmental and computational
requirements low are symbolic reasoning approaches
and lightweight simulation frameworks. We suggest
that simulation and optimisation frameworks need to
be built with a ‘real-time application’ mentality where
clear limitations on what is computationally tractable
for real-time use should be considered from the
outset. This requires revisiting foundational theory in
DES - graphical models, such as Petri Nets, need only
define the relations or dependencies between
variables followed by intentional programming to
minimise the number of computer operations.
Real time information is essential in order to
establish the state of the controlled system. “Industrie
4.0” applications enable this via data from the CPS
layer that enables easy injection of the initial state for
rescheduling. This will address concerns regarding
immediate response expected from real-time control
and rescheduling that adapts to these disruptions or
disturbances automatically. In the context of these
two points, we have found a fruitful analogy is
viewing the control of DES (in applications such as
real-time scheduling of manufacturing systems)
through the lens of path or trajectory planning in
Robotics.
The apparent distinction between mathematical
and computational approaches is superficial in that
strictly speaking, the representational power of both
are along the same continuum and the trade-off is
between the ease of model definition, model
verification and computational tractability for
complex manufacturing systems. Graphical models,
such as Petri Nets, are mathematical and
programmatic representation hybrids that define rules
of interactions between variables as a form of model
reduction - the logical, formal systems description
directly relates to exhibited computational efficiency.
DES Simulation (DESS) complexity is largely an
extension of Petri Nets using Finite State Automata
(FSA) or Finite State Machines (FSM) and
supporting software for data collection, visualisation
and statistics gathering capabilities.
On the one hand, all systems will experience some
form of combinatorial state explosion and many will
be sufficiently complex to make rule base discovery
intractable for long planning horizons. On the other
hand, DESS software used by manufacturing
researchers focus primarily on ease-of-use; user
interfaces, 3D representations and other such features
which do little to optimize the speed of simulation
itself - some of the very earliest programming
languages [such as Fortran, Simula67 and Simscript]
initially targeted scientific and numerical computing
followed by simulation modelling, including DESS,
through the introduction of objects, classes etc. Since
that time, we have had a monumental increase in
computational processing which has been unutilised
by prioritizing the aforementioned features used in
research, or overlooked as a software requirement by
developers and vendors. We make some observations
in regards to parallelisation of our technique and
algorithm in Section 2.4.
In addition to use of inefficient simulation models,
we observe that approaches in existing work do not
combine the simulation and optimization/search
process together into the same program, but instead
deploy a low bandwidth approach where the
optimisation algorithm (typically an evolutionary
metaheuristic) generates a complete possible solution
with combinatorial complexity of the space of actions
𝚺
𝑪
to the power of episode length 𝒆
𝒕
that is then
evaluated by the simulation for both feasibility 𝑭
(Boolean) and multi-objective (𝑶
𝟏
,𝑶
𝟐
,…,𝑶
𝒏
)
performance (or cost). (Sutton & Barto, 2018)
addressed this oversight directly; ‘Evolutionary
methods ignore much of the useful structure of the
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
154
reinforcement learning problem: they do not use the
fact that the policy they are searching for is a function
from states to actions; they do not notice which states
an individual passes through during its lifetime, or
which actions it selects’.
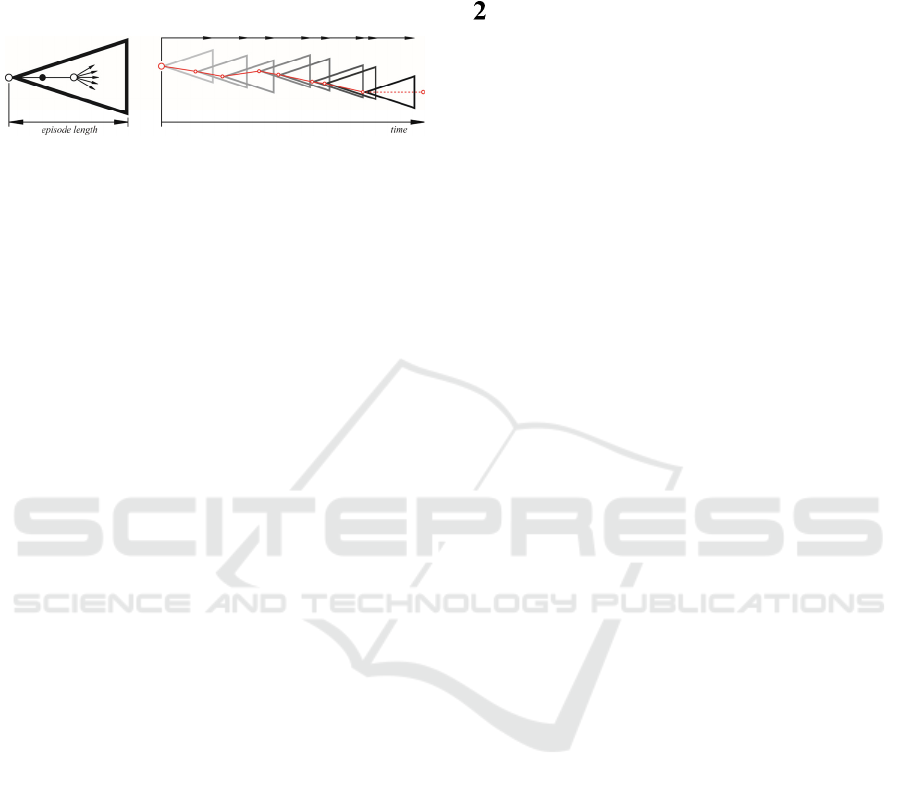
Figure 1: Rolling windows; breaking down continuous time
into episode lengths, and conducting scheduling processes
within these spaces, where the left hand node is the initial
state and the triangular shape represents the bifurcating
search in future state space.
The finite set of possible states for DES is
exceptionally large and using this model free
approach means many generated solutions are likely
to be logically impossible or unfeasible; 𝑭=𝟎
(False), thus waste valuable computational search
[removing the possibility of real-time scheduling and
forcing use of HPC] since they do not exploit the tree-
like compositional structure of DES process
trajectories (see Fig. 3), nor capture the full detail of
the system behaviour in the simulation at each time
instance, particularly in regards to dynamically
varying constraints.
Further, we advocate that the simulation need only
be at the so-called supervisory level of abstraction so
that the branching factor (choice – the number of
feasible actions) is manageable on a case-by-case
basis. This is analogous in older literature to
Hierarchical Task Decomposition (HTD) (Moore &
Flann, 1999) and Hierarchical Task Networks (HTN)
(Dvorak, Bartak, Bit-Monnot, Ingrand, & Ghallab,
2014) (Cao & Sanderson, 1994) and more recently the
idea of general idea of attention (Wang, Hao, & Cao,
2020) - an intelligent system can only consider so
many possibilities at once in order to be tractable. Our
approach is that secondary effects of sub-actions or
sub-tasks, (for instance, the use of transportation or
logistics systems, setting-up of resources), are
procedurally generated after the higher-level decision
to assign a task to a resource has been made. The
ramifications of these tasks are therefore experiential
and observed only in the resulting, constructed
schedule and respective statistical data but are not
considered a priori as part of the decision itself.
METHODOLOGY
The approach discussed here exploits the Timed Petri
Net as an explicit model to represent a state transition
function. This allows construction of each solution by
first defining this model (in 2.1), taking an
observation or percept as input (in 2.2), recording this
input as an initial state marking, which is a basic form
of object permanence, querying the DES model
(which is conceptually our knowledge representation)
to find only the logically feasible components of the
solution at each time step (in 2:3), followed by a
policy for selection over the space of feasible actions
(a Monte-Carlo selection used, resulting in Monte
Carlo Tree Search (MCTS)). This casts it as a
planning problem - analogous to a fully observable,
non-stationary MDP formalism as a stepwise
stochastic decision process, which is the source of its
reconfigurability whilst avoiding the need to ‘solve’
the MDP using sample-inefficient and potentially
unstable methods seen in RL. This results in a fast,
elegant and efficient depth-first search and
deliberation process that belongs to the class of
anytime optimal algorithms which run continuously
and give the optimal-so-far when queried.
2.1 Modelling Scheduling Processes
through DES
In the context of Industrie 4.0, scheduling problems
are applicable to some physical environment or
system under control that are continuously evolving
in real-time. This ‘infinite’ time horizon (i.e. the
continuous physical reality) may be divided into in a
rolling window of sequential episodes using a
receding horizon. Fig. 1 illustrates this concept
graphically. Our definition of a schedule is an event-
driven control policy over some time interval that is
optimized towards a mixture of emergent or
cumulative properties and the occurrence of specific
events. Systems that are scheduled orient around
sequencing tasks in concurrent systems and use
categorical, symbolic relations between tasks (or
Reconfigurable Scheduling as a Discrete-Event Process: Monte Carlo Tree Search in Industrial Manufacturing
155
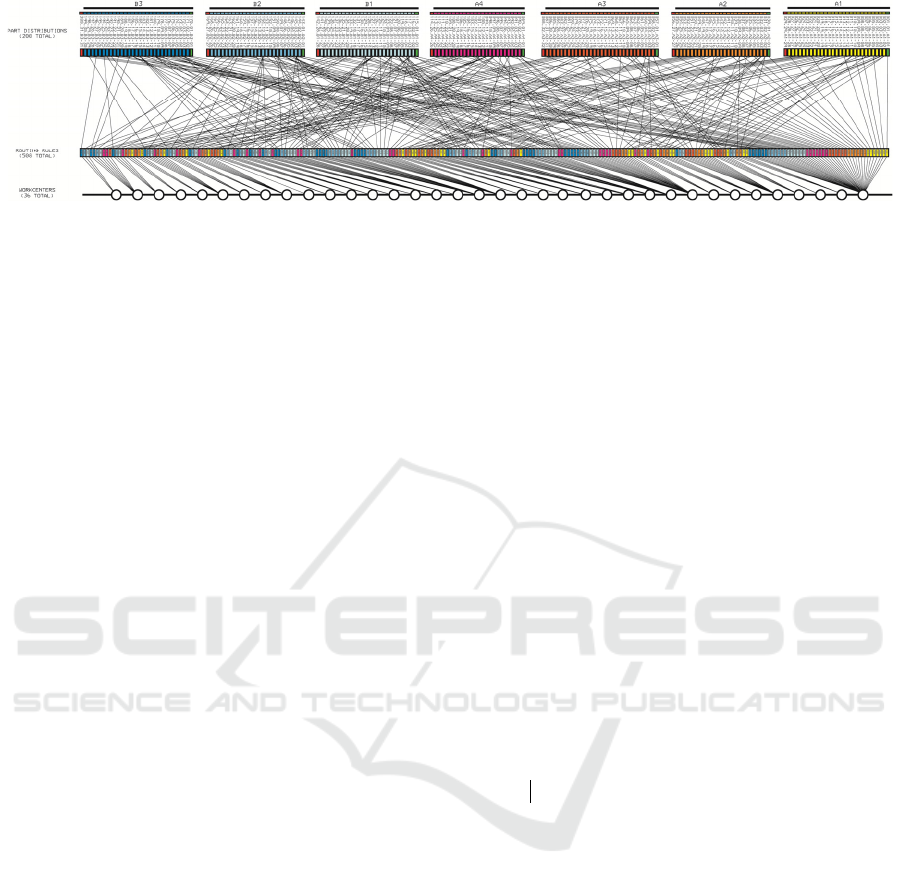
Figure 2: The Timed Petri-Net Structure of the Discrete-Event System; we have 7 part (task) types, each passing through as
many as 32 sequential sub-tasks completed on 36 workcenters (resources). 200 controlled events, the links, represent actions
- routing rules - that indicate the assignment of a sub-task to a resource. Conceptually, tokens represent the presence of a part,
and will move around this diagram as the process is simulated.
jobs) and resources (or processors) that are executed
dynamically in serial or in parallel.
The ‘Petri Net’ is a form of DES model and was
conceptualised by Carl Adam Petri in 1962 in his PhD
thesis “Communication with Automata” and are
particularly suitable for the modelling of systems
characterised by concurrency, parallelism, conflicts,
causal dependency, synchronisation and crucially,
choice. Stochastic Petri Nets (SPNs) and Generalised
Stochastic Petri Nets (GSPNs) are extensions which
aim to model unpredictable behaviour, whilst Timed
Petri Nets (TPNs) extend PN to include time
representations such as time delays or durations to be
associated with transitions, places and arcs. This
enables TPN to become applicable in scheduling
problems; temporally dynamic behaviour [a DES
‘trajectory’] is driven entirely by sequentially indexed
asynchronous events. Two terms, selected on account
of their semantic generality, define the fundamental
components of scheduling problems; tasks and
resources. A ‘task’ represents some contextual
process abstraction from some lower-level system. In
computer programs; instantiation and deployment of
specific controller or an on-line discriminatory
statistical model, in hierarchical multi-agent robotic
swarms; task decomposition for an individual robot,
a manufacturing system; a machine, in a computer
system; a processing unit. Meanwhile, a ‘resource’
represents some finite affordance; utilization of a sub-
system.
Petri Nets are a directed bipartite graph, where
mathematical topological structures model the
pairwise relations between objects; these relations
represent ‘domain knowledge’ within the system.
Task type queues and resources are the nodes or
vertices and the links or edges are the relations. There
are two types of nodes; places and transitions.
Transitions are durationless events representing
decisions to dynamically map tasks to resources.
Tasks are represented by tokens that are unit
variables; they provide logical information in that
their presence indicates a true condition and
additionally represent queues by using real-valued
integers for volumes. The Petri Net structure may be
defined as a mathematical incidence matrix that
relates tasks to resources. Provided these
relationships are represented, it is not important how
this is implemented in a computer program –
emphasis should be placed on high performance; e.g.
sparse arrays or hash maps.
This system belongs to Safran Landing Systems
(SLS), Gloucester, and produces large titanium and
steel structural components for landing gear for the
next generation of civil aircraft. There are parallel
machines, multi-part machines, re-entrant flows and
significant scope for assignment conflicts. Taking one
part as an example, there are 1440 unique possible
paths through the system and any number of possible
parts in the system (provided maximum number of
tokens is not exceeded) at any one time (i.e. a given
state). Tokens represent tasks or in this case, parts.
Tokens belong to places. Petri Net ‘places’ are of two
forms; task type queues (the rectangular elements in
‘Part Distributions’ on the top of Fig. 2) or the
resources or processors (which are the circular
elements on the bottom of Fig. 2 that are denoted as
‘Workcenters’). Events 𝚺
𝒊
are encoded with unique
integer keys and are executed as single asynchronous
or multiple synchronous state transitions (central in
Fig. 2 as ‘Routing Rules’ which are controlled events
𝚺
𝑪
exclusively; rules which we want the agent to
discover by searching through different firing
sequences). The complex relation between resources
and the tasks are indicated by the edges - defining a
holistic, irreducible system of rules. In this work, we
introduce a concept known as task transformation –
when a task or part leaves a process or resource via a
uncontrolled event 𝚺
𝑼
it is transformed or ‘re-
labelled’ by going into the subsequent task queue.
The set of 𝚺
𝑼
is not shown in the diagram Fig. 2.,
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
156

Figure 3: Trajectory Mutation; all represent state space in the vertical and time in the horizontal. On the left we show a purely
exploratory process, each trajectory is recorded, the highest relative performance (the elite trajectory) is shown by a red trace.
In the centre, we show the unexplored controlled events associated with the elite trajectory. By selecting, at random, elements
from this set of unexplored controlled events, we ‘branch off’ from the elite trajectory. On the right, we show these new
trajectories from their branching points in blue. The process is repeated iteratively.
since they are a mirror of the controlled events, with
this small variation only. In this way, a task persists
through as many intermediate states or sub-tasks as
required by the application, even where these
intermediary states have different processing
requirements. This inventive step was driven by the
complex modelling requirements inherent to the
highly flexible case study, and this contribution
exploits the procedural processes inherent to
hierarchical task decomposition.
2.2 Percepts & Inputs in DES
When the agent takes an observation of the real
system under control, tokens are initialised and
distributed into their respective places and any
anticipated uncontrolled events are added to the event
list to isomorphically represent the state. The concept
of future events being associated to the present state
is a further important contribution. A similar concept
is employed in continuous-time domain control as
systems of differential equations, since these too
allow the controller to delineate inputs by providing
data a predictive property.
2.3 Inferring Logically Feasible
Controlled Events
We use a process of deduction that exploits the
persistence of data (tokens) discussed in 2.2 so that
the compositionality of the process is retained.
Constructing only feasible trajectories from the initial
state exploits the explicit mapping between state and
possible events. Once the Petri Net is marked – i.e.
injected with state, the subset 𝚺
⊆ 𝚺
must
be discovered by applying propositions first,
followed by executing singular or combinations of
controlled events in a trial and error method. The
propositions are;
Proposition 1: No element in instances of the state or
marking vector, (i.e. the Petri Net values) can be less
than 0.
Proposition 2: The value of an integer in a resource
place cannot exceed the maximum task-capacity of
the respective resource.
Once discovered, elements in 𝚺
are
selected until the set 𝚺
becomes empty. This
means that over a given number of assignments, in-
process tasks are blocking the processing of out-of-
process tasks, or that the resources available cannot
process waiting tasks. In which case the system is in
an Invariant Behaviour (IB) state, in which
unmodelled, lower-level processes are observed.
The maximum branching factor of sequential
decisions is far smaller – one controlled event per
time step 𝚺
=1, in combination, the upper bound is
𝚺
=2
𝚺
𝑪
−1. Although the blocking mechanism
will reduce this value significantly. The process of
discovering neighboring states through controlled
events is recursively repeated until the pre-defined
episode length is reached or the goal is completed –
i.e. tokens or processes have reached an acceptable
intermediate or finished state. The states which the
model passes through define the Behaviour
Permutation (𝑩𝑷) and respective Controlled Event
Permutation ( 𝑪𝑬𝑷 ) as a dimensional map or
permutation of selected controlled events. Together,
these define feasible trajectory over an episode of
time. This could also be called a policy, a plan, or
simply a schedule. This is because at each time
instance 𝒕, the system is fully defined - there is an
expected state 𝑩𝑷
𝒕
and control decision 𝑪𝑬𝑷
𝒕
. In
addition to these maps, we include a truth table or
bitmap 𝑪𝑬𝑷
𝑼
that records unexplored CEP
elements, shown centrally in Fig. 3. This is used in
the new algorithm discussed in 2.5. A number of
trajectories conceptually creates a complex tree
structure of branching time, where the initial state is
the root node, the trajectory a branch the final state is
the leaf node, shown at the left of Fig. 3.
Reconfigurable Scheduling as a Discrete-Event Process: Monte Carlo Tree Search in Industrial Manufacturing
157

Figure 4: Results; on the far left, we have the mean of individuals for each simulation step, where the CTRL is pure MCTS
shown in black. The other colours are various types of MCTS-ETL, with a 5, 10, 25 and 50 individual population types with
a two-term power curve fitting. Although MCTS has some optimisation capability as a result of sampling the space, MCTS-
ETL search outperformed MCTS in both discovery of the minimum makespan and the population average makespan. On the
right is the underlying data for the MCTS-ETL-POP:10 for each processor core.
2.4 Real-time Robust Control
There are many ways in which disruptive events
change the initial state input to the system – new
orders, order deletion, re-routings, changes in due
dates or random resource unavailability/breakdown,
errors in gathering state data and changes to futures
events [e.g. a resource is scheduled for maintenance
which is recorded as an anticipated event].
Any Disturbances or Are Reflected in the
Updating of the Initial State and/or an Adjustment to
the Event List Respectively. This Essentially Defines
a New Problem and Triggers an Entirely New Search
Process, but Because Trajectories Are Generated
Rapidly, the Claim for Real-Time System Control
Remains Intact. Further, Because Multiple Instances
of the DES Are Independent, and the Initial
Population Is Purely Exploratory, the Search May Be
Conducted using Parallel Processing, Increasing the
Speed of Rescheduling Dramatically.
2.5 Elitist Trajectory Mutation
A final contribution is the presentation of a simple
tabular metaheuristic inspired by ideas from
evolutionary computing called Elitist Trajectory
Mutation (ETM). Because each trajectory has an
inherent branch-like structure, any direct exploitation
of its information content must be maintained in order
to localise search and converge to near-optimal
makespan performance. This makes many highly
popular exploitation approaches, such as crossover in
Genetic Algorithms, non-sensical. Instead, the
mutation operator here is restricted to feasible, pre-
discovered mutations. The emphasis on a tabular or
memory-based approach is reflective of an overall
attempt to keep computational requirements low.
As shown in in Fig. 3 (left), the search process
hitherto described generates an initial population that
is purely exploratory by sampling the state space
generated by the TPN – a Monte-Carlo Tree Search
(MCTS). The highest performing trajectory (the elite
individual) is used as the phenotype. The sum of
unexplored controlled events of this individual is used
as the upper limit on a pseudo-random real-valued
integer, where the lower limit is 1. The integer
generated selects an element in 𝑪𝑬𝑷
𝑼
from this
individual’s map, selects the respective controlled
event (the mutation) and constructs a new trajectory
from that point, using MCTS as normal. This means
that every mutation is verified as feasible and
guarantees feasible trajectories are generated.
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
158

Figure 5: Industrial Informatics; in the top plot we have the schedule itself, 672 parts (tasks) comprised of 19200 processes
(sub-tasks) that are distributed over a period of 5x10
5
minutes; approximately 347 days on the 36 workcenters (resources).
Workcenter ‘WC:06’ shows exceptional utilization. Note that a continuous colour block indicates continuous processing.
Factory utilization varies significantly over the time period. Using a maximum partially processed sub-task volume limit of
30, there is a largely linear production rate shown in the lower two plots.
This process may be repeated using generation-based
populations or hill-climbing. Convergence to local
minima is avoided by selection of elements in 𝑪𝑬𝑷
𝑼
that are ‘early’ in the trajectory (thereby are in effect,
more exploratory), whilst ‘late’ elements mutations
are more exploitative. As shown in Fig. 4, in addition
to being attractively simple and computationally
cheap, we found this metaheuristic to converge
quickly and effectively in industrial test cases, far
exceeding the performance of purely exploratory
search alone.
ANALYSIS & DISCUSSIONS
The main difficulty is that DES model development,
verification and validation from knowledge is
exceptionally time-consuming. A software approach
to take a description to a working DES model would,
at a minimum, reduce development time and could
help avoid human modelling errors. Initial efforts
have been discussed in (Helliwell, Morgan, &
Mahfouf, 2021). It may be possible to reduce the
model’s computational complexity further by using
adjusting the number of significant figures used in
variables. In complex scheduling problems,
exploiting this imprecision could be a useful pre-
processing step. In a small set of cases where
‘scheduling problem’ or ‘scheduling machine’ is
defined as a DES, we believe some areas of state
space are unexplored by the naïve trajectory-
generation process used - we intend on covering these
cases in a short paper in future.
The makespan minimization approach is a single
objective; further detail could include adding more
costs or objectives, for instance, resource context
switching: apply a reward or punishment to the
complete system upon a change in state for a
resource. Complex or mixed utility functions as
programs or collections of terms, assigning credit to
occurrence of certain events at certain times,
cumulative rewards, rather than a closed-form single
or multiple scalar objectives (i.e. multi-objective)
seen in typical optimisation or reaching ‘goal states’
in planning.
Interval scheduling of industrial systems that have
choice, hidden information and high number of
dependencies lack a standard problem that could
facilitate benchmarking different approaches in
Reconfigurable Scheduling as a Discrete-Event Process: Monte Carlo Tree Search in Industrial Manufacturing
159

methodology, software architecture (including
memory structures and processes), programming
language choice, implementation into hardware
(including considering the trends in heterogeneous
and parallel computing) and algorithm design.
We see the next step in real-time manufacturing
operations control is the final type discussed by
(Ouelhadj & Petrovic, 2009); robust pro-active
scheduling, which attempt to integrate risk into
predictive models, essentially pre-empting the effects
of uncertainty and disruptions to minimise the effects
on performance measure – indeed, there are
significant possibilities in combining Uncertainty
Quantification (UQ) with global optimization of
industrial systems. Precalculation of schedules is
using the simulation models to consider unactualised
initial states, possible configurations that have not
been expressed by the system under control –
generating hypothetical scenarios in the form of
experiments to utilise unused computational
resources. For instance, the initial state could be
gathered from the CPS layer, followed by a random
generation of resource unavailability, variations in
delivery requirements, and variations of constraints.
The difficulty here is transferring the learning from
these cases into a flexible knowledge representation
that can help inform future searches rather than a
brittle tabulation or memoisation approach. We are
seeing similar ideas manifest in ML as self-supervised
learning and self-play.
Two aspects relate to the frameworks overall
computational intelligence; brute computation and
better algorithmic processes. It is challenging to
establish a clear relationship between the proposed
approach and ML approaches. Pre-trained black-box
metamodels have been recently explored in the
context of Deep Reinforcement Learning (DRL) by
(L. Hu et al., 2020), (Xia et al., 2020) and (H. Hu, Jia,
He, Fu, & Liu, 2020). The challenge is establishing
objectively just how reconfigurable these approaches
are and whether they can ensure a significant
generalisation capability, and if required, the training
or optimisation process is sufficiently
computationally demanding to conflict with real time
applications.
A further weakness in an ML approach is that the
model cannot be easily updated. In many industrial
applications, it is inevitable that the structure of the
controlled system is subject to variation (e.g. new part
or resource) and the configuration space defined is
therefore new. This would need a complete re-
training in the case of an ML approach. In the
proposed method, this would only require updating
the explicit Petri Net structure, whilst the scheduling
mechanism itself remains intact. Independence
between trajectories indicates this could be an
example of an Embarrassingly Parallel (EP)
[Processing] problem, in which case framework
deployment in multi-core CPU or Graphical
Processing Unit (GPU) would allow multiple DES
evolutions occurring in parallel, rapidly exploring
state space. In this research, we have successfully
used a multi-core approach, but believe that GPU will
be more performant.
In future work, we envisage probabilistic
approaches that integrates ML as a supportive ‘black-
box’ sub-system. The existing method operates as a
first operation that creates self-supervised, synthetic
data (of near-optimal trajectories) that can be used to
train a generalised function such as Artificial Neural
Network (ANN). The output of such a function would
weight the space of feasible actions (a policy) as a
secondary operation. This would enable faster-still
real-time control of those systems with high
branching factors (e.g. large DES models that express
high flexibility and high feasibility). Candidates that
have inspired such an approach include high-
performing online graph-based metaheuristics, such
as Ant Colony Optimisation (ACO).
4 CONCLUSIONS
In this paper we show how an extended TPN can be
used to define a computationally efficient MCTS
scheme for makespan minimisation of full-scale
industrial batch-scheduling problems. We show how
this can be extended into the ETM algorithm specific
to DES to localise search and optimisation.
ACKNOWLEDGEMENTS
The authors would like to acknowledge staff at Safran
Landing Systems, Gloucester and University of
Sheffield, Advanced Manufacturing Research Center
(AMRC), Sheffield in their support of this work and
the EPSRC Grant Number EP/L016257/1.
REFERENCES
Ambrogio, G., Guido, R., Palaia, D., & Filice, L. (2020).
Job shop scheduling model for a sustainable
manufacturing. Procedia Manufacturing, 42, 538–541.
https://doi.org/10.1016/j.promfg.2020.02.034
Baruwa, O. T., Piera, M. A., & Guasch, A. (2016).
TIMSPAT – Reachability graph search-based
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
160

optimization tool for colored Petri net-based
scheduling. Computers and Industrial Engineering,
101, 372–390.
https://doi.org/10.1016/j.cie.2016.07.031
Bertsekas, D. P., & Tsitsiklis, J. (1996). Neuro-Dynamic
Programming.
Brucker, P., & Schlie, R. (1990). Job-shop scheduling with
multi-purpose machines. Computing, 45(4), 369–375.
https://doi.org/10.1007/BF02238804
Bull, L. (2015). A brief history of learning classifier
systems: from CS-1 to XCS and its variants.
Evolutionary Intelligence, 8(2–3), 55–70.
https://doi.org/10.1007/s12065-015-0125-y
Butz, M. V. (2015). Learning classifier systems. Springer
Handbook of Computational Intelligence, (June), 961–
981. https://doi.org/10.1007/978-3-662-43505-2_47
Cao, T., & Sanderson, A. C. (1994). Task Decomposition
and Analysis of Robotic Assembly Task Plans Using
Petri Nets. IEEE Transactions on Industrial
Electronics, 41(6), 620–630.
https://doi.org/10.1109/41.334579
Chan, F. T. S., Bhagwat, R., & Chan, H. K. (2014). The
effect of responsiveness of the control-decision system
to the performance of FMS. Computers and Industrial
Engineering, 72(1), 32–42.
https://doi.org/10.1016/j.cie.2014.03.003
Charpentier, P., & Thomas, A. (2005). Reducing simulation
models for scheduling manufacturing facilities. 161,
111–125. https://doi.org/10.1016/j.ejor.2003.08.042
Chen, F. ., & Shukla, C. S. (1996). The state of the art in
intelligent real-time FMS control : a comprehensive
survey. Journal of Intelligent Manufacturing, 7, 441–
455.
Cheng, Y., Zhang, Y., Ji, P., Xu, W., Zhou, Z., & Tao, F.
(2018). Cyber-physical integration for moving digital
factories forward towards smart manufacturing: a
survey. International Journal of Advanced
Manufacturing Technology, 97(1–4), 1209–1221.
https://doi.org/10.1007/s00170-018-2001-2
Cowling, P., & Johansson, M. (2002). Using real time
information for effective dynamic scheduling. 139,
230–244.
Dietterich, T. G., & Zhang, W. (1995). A Reinforcement
Learning Approach to Job-shop Scheduling. Ijcai,
1114–1120. Retrieved from
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.
1.1.8.3850&rep=rep1&type=pdf
Dvorak, F., Bartak, R., Bit-Monnot, A., Ingrand, F., &
Ghallab, M. (2014). Planning and Acting with
Temporal and Hierarchical Decomposition Models.
Proceedings - International Conference on Tools with
Artificial Intelligence, ICTAI, 2014-
Decem, 115–121.
https://doi.org/10.1109/ICTAI.2014.27
Feldt, J., Kourouklis, T., Kontny, H., & Wagenitz, A.
(2020). Digital twin: Revealing potentials of real-time
autonomous decisions at a manufacturing company.
Procedia CIRP, 88, 185–190.
https://doi.org/10.1016/j.procir.2020.05.033
Ferber, J. (1999). Multi-Agent System: An Introduction to
Distributed Artificial Intelligence.
Fujimoto, R. M. (2016). Research challenges in parallel and
distributed simulation. ACM Transactions on Modeling
and Computer Simulation, 26(4), 1–29.
https://doi.org/10.1145/2866577
Ghasemi, A., Azzouz, R., Laipple, G., Kabak, K. E., &
Heavey, C. (2020). Optimizing capacity allocation in
semiconductor manufacturing photolithography area –
Case study: Robert Bosch. Journal of Manufacturing
Systems, 54(November 2019), 123–137.
https://doi.org/10.1016/j.jmsy.2019.11.012
Helliwell, T. J., Morgan, B., & Mahfouf, M. (2021).
Searching & Generating Discrete-Event Systems.
Proceedings of the 18th International Conference on
Informatics in Control, Automation and Robotics,
ICINCO 2021, 203–210.
https://doi.org/10.5220/0010584302030210
Howard, R. A. (1960). Dynamic Programming and Markov
Processes.
Hu, H., Jia, X., He, Q., Fu, S., & Liu, K. (2020). Deep
reinforcement learning based AGVs real-time
scheduling with mixed rule for flexible shop floor in
industry 4.0. Computers and Industrial Engineering,
149(January), 106749.
https://doi.org/10.1016/j.cie.2020.106749
Hu, L., Liu, Z., Hu, W., Wang, Y., Tan, J., & Wu, F. (2020).
Petri-net-based dynamic scheduling of flexible
manufacturing system via deep reinforcement learning
with graph convolutional network. Journal of
Manufacturing Systems, 55(December 2019), 1–14.
https://doi.org/10.1016/j.jmsy.2020.02.004
Lee, J., Bagheri, B., & Kao, H. A. (2015). A Cyber-Physical
Systems architecture for Industry 4.0-based
manufacturing systems. Manufacturing Letters, 3, 18–
23. https://doi.org/10.1016/j.mfglet.2014.12.001
Li, X., Wang, L., Zhu, C., & Liu, Z. (2020). Framework for
manufacturing-tasks semantic modelling and
manufacturing-resource recommendation for digital
twin shop-floor. Journal of Manufacturing Systems,
(August), 0–1.
https://doi.org/10.1016/j.jmsy.2020.08.003
Luo, H., Fang, J., & Huang, G. Q. (2015). Real-time
scheduling for hybrid flowshop in ubiquitous
manufacturing environment. Computers and Industrial
Engineering, 84, 12–23.
https://doi.org/10.1016/j.cie.2014.09.019
Maccarthy, B. L., & Liu, J. (1993). Addressing the gap in
scheduling research: a review of optimization and
heuristic methods in production scheduling.
International Journal of Production Research, 31(2),
299–309. https://doi.org/10.1080/00207549308956726
Mejía, G., & Pereira, J. (2020). Multiobjective scheduling
algorithm for flexible manufacturing systems with Petri
nets. Journal of Manufacturing Systems, 54(January),
272–284. https://doi.org/10.1016/j.jmsy.2020.01.003
Moore, K. L., & Flann, N. S. (1999). Hierarchical task
decomposition approach to path planning and control
for an omni-directional autonomous mobile robot.
IEEE International Symposium on Intelligent Control -
Proceedings, 302–307.
https://doi.org/10.1109/isic.1999.796672
Reconfigurable Scheduling as a Discrete-Event Process: Monte Carlo Tree Search in Industrial Manufacturing
161

Negahban, A., & Smith, J. S. (2014). Simulation for
manufacturing system design and operation: Literature
review and analysis. Journal of Manufacturing
Systems, 33(2), 241–261.
https://doi.org/10.1016/j.jmsy.2013.12.007
Ouelhadj, D., & Petrovic, S. (2009). A survey of dynamic
scheduling in manufacturing systems. (October 2008),
417–431. https://doi.org/10.1007/s10951-008-0090-8
Oztemel, E., & Gursev, S. (2020). Literature review of
Industry 4.0 and related technologies. Journal of
Intelligent Manufacturing, 31(1), 127–182.
https://doi.org/10.1007/s10845-018-1433-8
Pellegrini, A., & Quaglia, F. (2017). A fine-grain time-
sharing Time Warp system. ACM Transactions on
Modeling and Computer Simulation, 27(2).
https://doi.org/10.1145/3013528
Ramadge, P. J. G., & Wonham, W. M. (1989). The control
of discrete event systems. Proceedings of the IEEE,
Vol. 77, pp. 81–98. https://doi.org/10.1109/5.21072
Romero-Silva, R., & Hernández-López, G. (2020). Shop-
floor scheduling as a competitive advantage: A study on
the relevance of cyber-physical systems in different
manufacturing contexts. International Journal of
Production Economics, 224(February 2018).
https://doi.org/10.1016/j.ijpe.2019.107555
Rossit, D. A., Tohmé, F., & Frutos, M. (2019). Industry 4.0:
Smart Scheduling. International Journal of Production
Research, 57(12), 3802–3813.
https://doi.org/10.1080/00207543.2018.1504248
Sepp, H., & Jurgen, S. (1997). Long Short-Term Memory.
Neural Computation, 9(8), 1–32.
Shiue, Y. R., Lee, K. C., & Su, C. T. (2018). Real-time
scheduling for a smart factory using a reinforcement
learning approach. Computers and Industrial
Engineering, (101), 0–1.
https://doi.org/10.1016/j.cie.2018.03.039
Sutton, R. . S., & Barto, A. G. (2018). Reinforcement
Learning: An Introduction (2nd Ed.). In MIT Press.
https://doi.org/10.1109/TNN.1998.712192
Tuncel, G., & Bayhan, G. M. (2007). Applications of Petri
nets in production scheduling : a review. 762–773.
https://doi.org/10.1007/s00170-006-0640-1
Urbanowicz, R. J., & Moore, J. H. (2009). Learning
Classifier Systems: A Complete Introduction, Review,
and Roadmap. Journal of Artificial Evolution and
Applications, 2009, 1–25.
https://doi.org/10.1155/2009/736398
Váncza, J., & Monostori, L. (2017). Cyber-physical
Manufacturing in the Light of Professor Kanji Ueda’s
Legacy. Procedia CIRP, 63, 631–638.
https://doi.org/10.1016/j.procir.2017.04.059
Wang, Q., Hao, Y., & Cao, J. (2020). ADRL: An attention-
based deep reinforcement learning framework for
knowledge graph reasoning. Knowledge-Based
Systems, 197, 105910.
https://doi.org/10.1016/j.knosys.2020.105910
Wooldridge, M. (2009). An Introduction to MultiAgent
Systems: Second Edition.
Xia, K., Sacco, C., Kirkpatrick, M., Saidy, C., Nguyen, L.,
Kircaliali, A., & Harik, R. (2020). A digital twin to train
deep reinforcement learning agent for smart
manufacturing plants: Environment, interfaces and
intelligence. Journal of Manufacturing Systems, (June),
1–21. https://doi.org/10.1016/j.jmsy.2020.06.012
Zeigler, Bernard P., Sarjoughian, H. S. (2013). Guide to
Modeling and Simulation of Systems of Systems.
IN4PL 2021 - 2nd International Conference on Innovative Intelligent Industrial Production and Logistics
162
