
Segmentation of Fish in Realistic Underwater Scenes using Lightweight
Deep Learning Models
Gordon B
¨
oer
1
, Rajesh Veeramalli
1
and Hauke Schramm
1,2
1
Institute of Applied Computer Science, Kiel University of Applied Sciences, Kiel, Germany
2
Department of Computer Science, Faculty of Engineering, Kiel University, Germany
Keywords:
Semantic Segmentation, Underwater Imagery, Fish Detection.
Abstract:
The semantic segmentation of fish in real underwater scenes is a challenging task and an important prerequisite
for various processing steps. With a good segmentation result, it becomes possible to automatically extract
the fish contour and derive morphological features, both of which can be used for species identification and
fish biomass assessment. In this work, two deep learning models, DeepLabV3 and PSPNet, are investigated
for their applicability to fish segmentation for a fish stock monitoring application with low light cameras. By
pruning these networks and employing a different encoder, they become more suitable for systems with lim-
ited hardware, such as remotely operated or autonomously operated underwater vehicles. Both segmentation
models are trained and evaluated on a novel dataset of underwater images showing Gadus morhua in its natural
behavior. On a challenging test set, which includes fish recorded at difficult visibility conditions, the PSPNet
performs best, and achieves an average pixel accuracy of 96.8% and an intersection-over-union between the
predicted and the target mask of 73.8%. It achieves this with a very limited parameter set of 94,393 trainable
parameters.
1 INTRODUCTION
Digital imaging in marine research has become a stan-
dard tool to help marine biologists answer many sci-
entific questions. This is largely due to rapid techno-
logical advances in recent decades that have resulted
in digital cameras with higher technological capabil-
ities, such as better image quality, larger storage ca-
pacities, and better in-situ applicability, while at the
same time being available at lower prices in the con-
sumer market. The applications of modern sensors
and algorithms for underwater imaging are numerous
and several reviews have been published, emphasiz-
ing either their general applicability for marine sci-
ence (Durden et al., 2016; Malde et al., 2020; Fer-
nandes et al., 2020) or for more specific research ar-
eas, like the observation of coastal marine biodiver-
sity (Mallet and Pelletier, 2014), the monitoring of hu-
man impact on marine environments (Bicknell et al.,
2016), the automatic determination of fish species
(Alsmadi and Almarashdeh, 2020) or the investiga-
tion of fish connectivity (Lopez-Marcano et al., 2021).
The aim of this work is to investigate the applica-
bility of deep learning methods to segment and outline
fishes, detected in real-world underwater scenes. In
addition to the information about what kind of objects
are present in an image and where they are located, a
successful semantic segmentation reveals what class
each pixel belongs to. It thereby becomes possible, to
additionally extract the outline of an object of inter-
est and the concise area it covers in the image. The
precise segmentation of a fish is an important pre-
requisite for the automatic determination of morpho-
metric characteristics, like the total length, which in
turn can be used to determine the fish weight (Wil-
helms et al., 2013). Additionally, well-defined land-
marks on the fish outline are commonly used to iden-
tify specific fish species (Rawat et al., 2017; Cav-
alcanti et al., 1999), while automatically localizing
those landmarks becomes easier with a good segmen-
tation result. The presented algorithm is an impor-
tant software part for a currently developed underwa-
ter sensor platform, that aims to estimate fish biomass
for a fish stock assessment, using non-invasive sensor
technology.
Recently, there has also been a great demand to
apply the undoubtedly successful deep learning al-
gorithms using limited hardware. This is especially
true for remotely controlled and autonomous vehicles,
such as underwater robots, for which we intend to use
158
Böer, G., Veeramalli, R. and Schramm, H.
Segmentation of Fish in Realistic Underwater Scenes using Lightweight Deep Learning Models.
DOI: 10.5220/0010712700003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 158-164
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the studied algorithms in the future. Therefore, more
light-weight segmentation models are investigated in
this publication. Precisely speaking, pruned versions
of DeepLabv3 (Chen et al., 2017) and PSPNet (Zhao
et al., 2017) are used on image extracts containing fish
to perform a binary segmentation into a fish and back-
ground class.
All the used underwater videos were recorded
with specific low-light cameras adapted for an under-
water usage, that allowed the recording of underwater
scenes without active lighting.
The main contributions of this work are:
• Alternative configurations of PSPNet and
DeepLabv3 which are better suited for hardware-
limited devices.
• The comparison of those segmentation models re-
garding their inference times and performance for
fish segmentation.
The rest of this article is organized as follows. Sec-
tion 2 provides an overview of related publications. In
section 3, the used recording setup and the employed
algorithms, together with the metrics used to evaluate
them, are described. Section 4 details the experimen-
tal evaluation, and section 5 concludes this paper.
2 RELATED WORK
Besides the automatic localization and classification
of arbitrary objects in digital images, the semantic
segmentation of those images is another active field
of research. It is of great relevance in many applica-
tion areas like autonomous driving (Grigorescu et al.,
2020), remote sensing (Marmanis et al., 2016), 3D-
sensing (Tchapmi et al., 2017) or cancer prediction
(Kourou et al., 2015). As in many areas of com-
puter vision, the most powerful algorithms to date
are based on deep learning architectures, well es-
tablished ones being Fully Convolutional Networks
(Long et al., 2015), Mask R-CNN (He et al., 2017), U-
Net (Ronneberger et al., 2015), PSPNet (Zhao et al.,
2017) or SegNet (Badrinarayanan et al., 2017).
Regarding the segmentation of fish in digital im-
ages, several efforts have been published so far. We
will focus on methods that have been tested on free-
swimming fish, recorded in underwater scenarios.
Due to the different settings, the results obtained for
dead fish photographed in air, e.g. on a photo-table
(Yu et al., 2020; Konovalov et al., 2019; Baloch et al.,
2017), conveyor belt (Storbeck and Daan, 2001) or
fish-trawler (Yang et al., 2018; French et al., 2015),
are not directly comparable.
So far, various standard algorithms have been ap-
plied to extract segmentation masks for fish, like
Otsu thresholding, edge detection, Grabcut, mean-
shift, matrix decomposition or the curvature scale
space transform (Abdeldaim et al., 2018; Qin et al.,
2014; Spampinato et al., 2010; Abbasi and Mokhtar-
ian, 1999). However, all those algorithms do not
profit from recent advances possible with novel deep
learning methods, e.g. the possibility to automatically
learn important image features, as opposed to hand-
crafted ones.
To our knowledge, published efforts to use deep
learning methods for semantic segmentation of free-
swimming marine animals are still rather limited.
Recently, the Enhanced Cascade Decoder Network
(ECD-Net) has been proposed (Li et al., 2021), which
is utilized for the segmentation of marine animals,
including several fish species. It builds upon a pre-
trained ResNet-50 (He et al., 2016) backbone, fol-
lowed by several feature enhancement and cascade
decoder modules which are trained using a mixture
loss. The authors report superior results, on a self-
published dataset, as compared to several state-of-the-
art models. Although the ECD-Net, in terms of train-
able parameters, has been reported to be smaller than
most of the other considered networks, with the re-
maining 207 million parameters it is much too com-
plex for the usage in an embedded system. In another
work, images from the stereoscopic camera system
Deep Vision (Rosen and Holst, 2013), which records
the water volume at the opening of a net trawl, were
automatically processed to determine the length of
visible fish. For this purpose, a Mask R-CNN was
used to detect and segment fish, followed by a re-
finement step to distinguish between individual over-
lapping fish. The authors report an average IoU of
84.5% for an independent test set of 200 images (Gar-
cia et al., 2020). Given the used camera setup, the fish
is recorded showing an unnatural behavior in front of
a rather uniform background, therefore, the obtained
results may not be directly transferable to real world
underwater scenarios.
3 MATERIALS AND METHODS
3.1 Data Acquisition
All experiments were carried out on videos of realis-
tic underwater scenes, which are part of a larger col-
lection of underwater sensor data, recorded by a pro-
totype underwater sensor platform. The device was
developed in a joint project of German universities
and marine engineering companies. Over the period
Segmentation of Fish in Realistic Underwater Scenes using Lightweight Deep Learning Models
159

of several months, the sensor platform was deployed
at seafloor level, at a depth of 22m in the North Sea,
about 45 nautical miles west of the island of Sylt, and
in the Kiel Fjord, an inlet of the Baltic Sea in north-
ern Germany. During the measurement campaigns,
the primary goal was to conduct a continuous record-
ing of stereo video and sonar data as well as various
oceanic parameters at a high temporal sampling rate.
In total, the raw data set spans approximately 240
days, resulting in nearly 3000 hours of video footage,
as the cameras were not operated during the night
hours.
All stereo videos were recorded using two Photo-
nis ”Nocturn XL” monochrome CMOS image sensors
with an optical resolution of 1280x1024 pixels and a
sampling rate of up to 20 frames/second, housed in
a specially designed underwater case with a flat view
port. The selected camera system is particularly suit-
able for low-light scenarios, which made it possible
to record without active lighting from dawn to dusk,
which was verified to a maximum depth of 22m. The
exclusive use of passive lighting is justified by the
main concept of the platform, which is to be as less
invasive as possible, e.g. by avoiding attraction ef-
fects from light sources (Marchesan et al., 2005), thus
ensuring that the fish can be recorded in their natural
behavior.
The same stereo camera setup will be duplicated
on a mobile platform that is currently being built,
making it possible to reuse many of the insights
gained from the stationary system as has been used
in the present work.
3.2 Methodology
In general, the semantic segmentation of an image can
be defined as a pixel-wise classification, where each
pixel is assigned to a specific object class. Depending
on the complexity, the task can further be divided into:
• Binary segmentation, if only 2 classes are sepa-
rated, e.g. foreground and background.
• Multi-class segmentation, if multiple classes are
considered, e.g. car, pedestrian, street, building.
• Instance segmentation, if each pixel additionally
is assigned to a unique instance of an object class,
thereby making it possible to distinguish between
several, possibly overlapping, occurrences of the
same object class.
The problem addressed in this work is a binary seg-
mentation problem since only the two classes fish and
background are considered.
A simple approach to define a segmentation net-
work is to stack multiple convolutional layers with the
same padding to preserve the resolution of the input
image. This type of architecture is computationally
intensive, as it preserves the input resolution through
all layers of the network. Therefore, most recent seg-
mentation networks follow an encoder-decoder archi-
tecture, which is comparatively more efficient. First,
a sequence of convolutional and either downsampling
or pooling layers creates a low-resolution image rep-
resentation which encodes the high-resolution infor-
mation of the input image. Second, to reconstruct the
original resolution in the output image, again a se-
quence of convolutional layers, followed by upsam-
pling layers or transposed convolutions is added, to
gradually increase the size of the spatial features.
In the present work, the two segmentation models
DeepLabv3 and PSPNet are used, both of which fol-
low the described type of encoder-decoder architec-
ture. As opposed to the original architectures, which
utilize a ResNet (He et al., 2016) as decoder, we em-
ploy MobileNetV2 (Sandler et al., 2018) for each of
the two segmentation networks. MobileNetV2 makes
use of depthwise convolutions and inverted residuals,
which are grouped together into several subsequent
blocks using ReLU6 as non-linearity function. The
features from the first 3 stages of the MobileNetV2,
which has been pre-trained on ImageNet, are passed
to the decoder part of the respective network. These
changes reduce the model complexity and size, which
makes them better suited for systems with limited
hardware.
3.2.1 PSPNet
In the original implementation of PSPNet, a pre-
trained ResNet was employed in combination with a
dilated network strategy to extract the feature maps.
As was mentioned above, the ResNet was inter-
changed with MobileNetV2 in the proposed system.
The spatial pyramid pooling (SPP) module in PSP-
Net first downsamples the feature maps from the en-
coder at 4 different scales (1 x 1, 2 x 2, 3 x 3 and 6
x 6), all of which are afterwards upsampled and fused
together. The integrated feature maps from the SPP
module are concatenated along with the feature maps
from the encoder. The decoder, followed by a bilinear
upsampling layer with a scale of 8, then converts the
concatenated feature maps to the segmentation out-
put. The SPP module eliminates the requirement for
a fixed input size.
3.2.2 DeepLabv3
In the DeepLabv3 architecture, a series of 3 x 3 atrous
convolutions are built in cascade, which are able
to capture long-range information from the inputs.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
160
Since in the original architecture, the last block of the
ResNet encoder is duplicated 3 times, we are dupli-
cating the last blocks of the MobileNetV2 encoder as
well. The atrous spatial pyramid pooling module in
DeepLabv3 consists of multiple parallel atrous con-
volutional layers with different dilation rates. This
module resamples the feature maps at multiple rates,
which have a complementary field of view compared
to normal convolution filters. Following this idea, it
becomes possible to classify objects or regions of ar-
bitrary size.
3.3 Evaluation Metrics
The metrics used for the validation of the models are
the pixel-level accuracy and Intersection-over-Union
(IoU):
• The overall per-pixel accuracy measures the ratio
of correctly classified pixels to total pixels.
• The IoU is measured as the area of overlap, di-
vided by the area of union, between the predicted
segmentation and the ground truth segmentation.
This metric is often referred to as Jaccard Index.
The investigated task of fish segmentation can be de-
fined as an unbalanced, binary segmentation problem,
since the background class dominates the fish class
in the dataset. In this case, the pixel-level accuracy
is sensitive to the class-imbalance problem, which is
why we rely on the IoU as an additional metric.
4 EXPERIMENTAL RESULTS
In this section, we provide a brief description of the
used data, the implementation and training details,
and the results achieved, as compared for the two net-
works.
4.1 Data
The used dataset consists of 600 labeled grayscale im-
ages with a resolution of 1280x1024 pixels, that de-
pict fish of the species Gadus morhua, which is of sig-
nificant importance to the fishery industry. The full
image set was randomly split into 80% for training,
10% for testing and 10% for validating the models.
Since the images in these data splits have been ex-
tracted from video sequences, very similar samples
may appear in the test and training set due to the
simple random selection, e.g. if a fish is swimming
slowly in front of the camera. Because of this, a sep-
arate test set of 1148 images, that where recorded on
a different day have been annotated as well. Using
this test set, we aim to fairly assess the generalization
ability of the segmentation models used. All images
have been annotated with binary segmentation masks,
where pixels, belonging to a fish, are marked as fore-
ground, everything else as background, respectively.
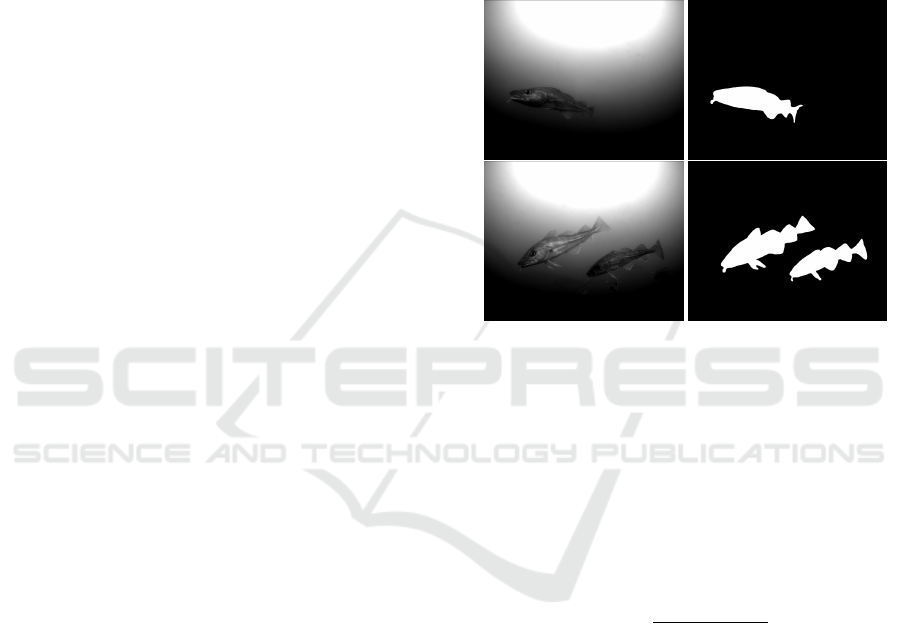
In most of the samples, background pixels predom-
inate the number of foreground pixels. Each thereby
annotated fish is included in a bounding-box of a fixed
size of 512x512 pixels. In several cases, a bounding
box may contain more than one fish.
Figure 1: Examples of an annotated segmentation mask.
4.2 Training Setup
The models have been implemented with PyTorch and
were trained and evaluated on a NVIDIA TITAN XP
GeForce RTX 2080 TI GPU. For the model optimiza-
tion, the Dice loss was used to determine the error
between the prediction and the ground truth, which is
calculated at pixel-level. The Dice loss for a complete
image is defined by the formula:
DL =
2
∑
N
i
y
i
ˆp
i
∑
N
i
ˆp
2
i
+
∑
N
i
y
2
i
(1)
with y
i
and ˆp
i
being the values of corresponding pix-
els representing the true object class and the predicted
class for this pixel, respectively. The network param-
eters were optimized using the Adam backpropaga-
tion algorithm, with a learning rate of 0.001. Both
models were trained with a batch size of 4, each sam-
ple being flipped with a probability of 0.5 in the hori-
zontal or vertical direction. Other augmentation tech-
niques were not used, since the possible data inter-
polation may produce an unnatural fish appearance.
Both models were trained for 30 epochs on the same
data splits. All segmentation results were thresholded
at a confidence value of 0.5 to obtain binary masks.
Segmentation of Fish in Realistic Underwater Scenes using Lightweight Deep Learning Models
161
4.3 Results and Discussion
The performance of each model on the independent
test set of 1148 images, using the aforementioned
evaluation metrics, is listed in Table 1. Regarding the
pixel accuracy, both models perform almost equally
well with an average accuracy of 96.8% for PSPNet
and 96.2% for DeepLabv3, respectively. Consider-
ing the IoU, PSPNet performs better with an average
value of 73.8% compared to the 69.9% as achieved by
DeepLabv3.
Table 1: Average pixel level accuracy and IoU as obtained
by the two utilized models.
Model Pixel Accuracy IoU
PSPNet 96.8% 73.8%
DeepLabv3 96.2% 69.9%
To assess which model is better suited for con-
strained hardware devices, we investigate their re-
spective inference times and model sizes, as listed
in Table 2. While both models perform equally well
in terms of segmentation accuracy, it is obvious, that
the PSPNet achieves this by using much less mem-
ory at a slightly higher framerate. The difference in
model size can be explained by the number of train-
able parameters, which adds up to 94,393 for the
PSPNet and 121,382,5 for DeepLabv3, respectively.
Deeplabv3 has much more trainable parameters be-
cause of the used trainable atrous convolutions in the
decoder. Given this insight, we suggest using the
PSPNet for a hardware limited device.
Table 2: Inference speed, in frames per second (FPS), and
model size of the two adapted models.
Model
Inference speed (FPS)
Model size
CPU GPU
PSPNet 5.5 155 463 KB
DeepLabv3 3.45 148 5 MB
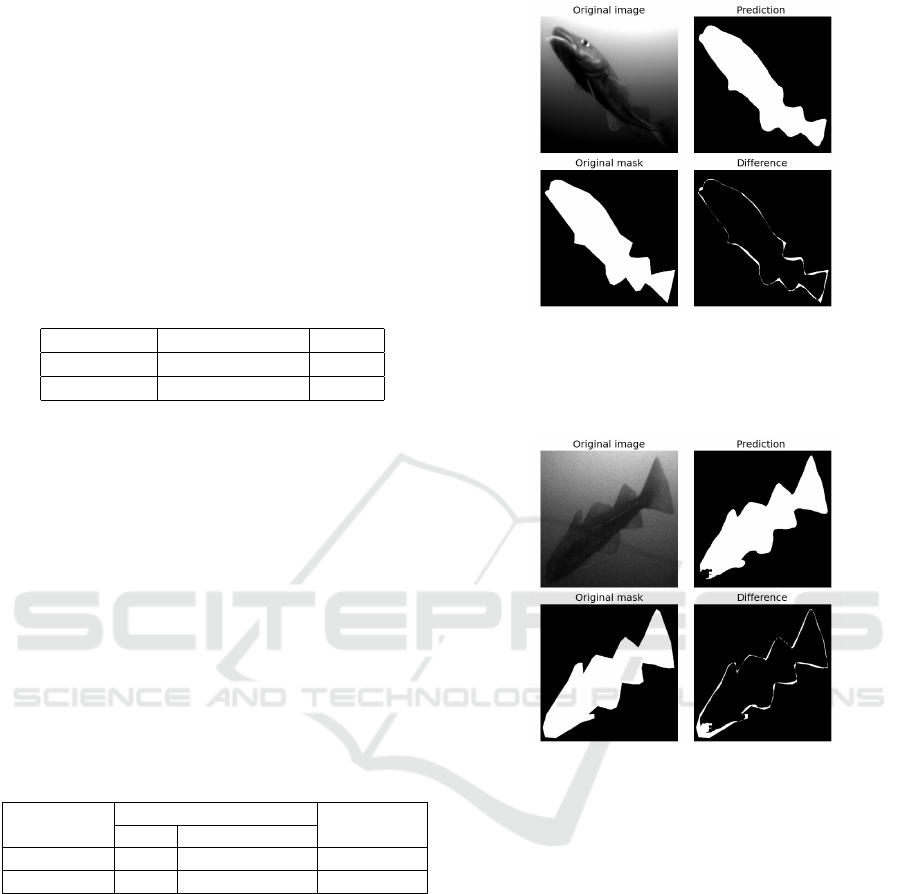
We have investigated those examples, where both
models fail to generate a perfect segmentation mask,
which revealed, that both models made similar errors
on the same samples. As is illustrated in Figure 2,
smaller errors can occur in the border regions of a fish.
Although the larger part of the fish body and the back-
ground have been segmented correctly, a small dis-
crepancy can be observed at the very edge of the fish.
In our opinion, this happens largely due to an inaccu-
rate ground-truth mask, which was annotated rather
coarsely, while the automatically generated mask is
characterized by much smoother and more detailed
edges. Another source of error are examples with
a low signal-to-noise ratio as depicted in Figure 3.
Those are typically images which were recorded at
Figure 2: Illustration of a good segmentation result ob-
tained with PSPNet, showing the input image, the predicted
segmentation, the ground-truth and the difference between
them. The difference between the predicted and the target
mask is highlighted by white pixels.
Figure 3: Example of a partially false segmentation, due to
difficult viewing conditions.
times of twilight, i.e. when the sun was below the
horizon. A comparable case is shown in Figure 4,
in which the fish becomes hardly visible while swim-
ming out of the imaged area, towards the ocean floor.
Since the recording setup does not use active lighting,
to avoid an unnatural attraction effect, the lower part
of the image is less well illuminated by the passive
lighting from the surface. This explains the poor visi-
bility in the lower part of the image. For those cases,
the models were not able to provide a good segmenta-
tion, although the human annotator was able to clearly
mark the fish. To understand this effect, it is impor-
tant to consider that the human annotator could switch
between frames during the annotation process, reveal-
ing the movement of the fish and making it easier for
the human eye to see or guess even barely visible out-
lines. The segmentation models, on the other hand,
only work on single frames, without any knowledge
of the temporal context. Therefore, a possible exten-
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
162

sion of the algorithm would be to operate on the full
video sequence, utilizing the connected frames, e.g.
by an object tracking or averaging of generated seg-
mentation masks.
Figure 4: Example of a partially false segmentation, due to
the fish swimming out of the imaged area.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, we have investigated PSPNet and
DeepLabv3 for their applicability to fish segmenta-
tion for a fish stock monitoring application with low
light cameras. The original architectures of both mod-
els were adapted for a usage on limited hardware,
by interchanging their respective decoder with Mo-
bileNetV2 and by reducing the number of used layers
in the encoder. We have trained and evaluated the seg-
mentation and processing performance of each model
on a custom dataset, which depicts freely swimming
fishes in an unconstrained underwater environment. A
larger test set of 1148 images was used to assess the
models generalization capability on completely un-
seen data. This set includes difficult, realistic samples
like fish recorded at difficult visibility conditions and
swimming in and out of the imaged area. While both
models perform comparably well in terms of segmen-
tation accuracy, the PSPNet outperforms DeepLabv3
in regard to inference speed, while achieving an aver-
age pixel accuracy of 96.8% and an intersection-over-
union between the predicted and the target mask of
73.8%.
In the future, we plan to extend this framework for
multi-class segmentation by considering additional
marine species and investigating whether segmenta-
tion results can be improved by considering the en-
tire video sequence instead of individual frames, es-
pecially in cases of difficult visibility. Additionally,
we are going to investigate several refinement steps
that can enhance the segmentation results, such as
Conditional Random Fields (Kr
¨
ahenb
¨
uhl and Koltun,
2011) or affinity matrices (Liu et al., 2017). In a sub-
sequent work, the generated segmentation masks will
be used to extract morphometric features, such as fish
length, and to locate specific key points on the fish
outline. This information will be utilized to deter-
mine the species and biomass of the detected fish. We
plan to deploy the developed algorithms on an em-
bedded device to be used in remotely operated and au-
tonomous underwater vehicles that complement a net-
work of stationary underwater sensors, with the goal
of performing a continuous fish stock assessment
REFERENCES
Abbasi, S. and Mokhtarian, F. (1999). Robustness of shape
similarity retrieval under affine transformation. In
Challenge of Image Retrieval, pages 1–10.
Abdeldaim, A. M., Houssein, E. H., and Hassanien, A. E.
(2018). Color image segmentation of fishes with com-
plex background in water. In International Conference
on Advanced Machine Learning Technologies and Ap-
plications, pages 634–643. Springer.
Alsmadi, M. K. and Almarashdeh, I. (2020). A survey on
fish classification techniques. Journal of King Saud
University-Computer and Information Sciences.
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder ar-
chitecture for image segmentation. IEEE transac-
tions on pattern analysis and machine intelligence,
39(12):2481–2495.
Baloch, A., Ali, M., Gul, F., Basir, S., and Afzal, I. (2017).
Fish image segmentation algorithm (fisa) for improv-
ing the performance of image retrieval system. Inter-
national Journal of Advanced Computer Science and
Applications, 8(12):396–403.
Bicknell, A. W., Godley, B. J., Sheehan, E. V., Votier, S. C.,
and Witt, M. J. (2016). Camera technology for mon-
itoring marine biodiversity and human impact. Fron-
tiers in Ecology and the Environment, 14(8):424–432.
Cavalcanti, M. J., Monteiro, L. R., and Lopes, P. (1999).
Landmark-based morphometric analysis in selected
species of serranid fishes (perciformes: Teleostei).
ZOOLOGICAL STUDIES-TAIPEI-, 38(3):287–294.
Chen, L.-C., Papandreou, G., Schroff, F., and Adam,
H. (2017). Rethinking atrous convolution for
semantic image segmentation. arXiv preprint
arXiv:1706.05587.
Durden, J. M., Schoening, T., Althaus, F., Friedman, A.,
Garcia, R., Glover, A. G., Greinert, J., Stout, N. J.,
Jones, D. O., Jordt, A., et al. (2016). Perspectives in
visual imaging for marine biology and ecology: from
acquisition to understanding. Oceanography and ma-
rine biology: an annual review, 54:1–72.
Fernandes, A. F., Dorea, J. R., and Rosa, G. J. (2020). Im-
age analysis and computer vision applications in an-
Segmentation of Fish in Realistic Underwater Scenes using Lightweight Deep Learning Models
163

imal sciences: an overview. Frontiers in Veterinary
Science, 7:800.
French, G., Fisher, M., Mackiewicz, M., and Needle, C.
(2015). Convolutional neural networks for counting
fish in fisheries surveillance video.
Garcia, R., Prados, R., Quintana, J., Tempelaar, A., Gracias,
N., Rosen, S., V
˚
agstøl, H., and Løvall, K. (2020). Au-
tomatic segmentation of fish using deep learning with
application to fish size measurement. ICES Journal of
Marine Science, 77(4):1354–1366.
Grigorescu, S., Trasnea, B., Cocias, T., and Macesanu,
G. (2020). A survey of deep learning techniques
for autonomous driving. Journal of Field Robotics,
37(3):362–386.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. B. (2017).
Mask R-CNN. CoRR, abs/1703.06870.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Konovalov, D. A., Saleh, A., Efremova, D. B., Domingos,
J. A., and Jerry, D. R. (2019). Automatic weight es-
timation of harvested fish from images. In 2019 Dig-
ital Image Computing: Techniques and Applications
(DICTA), pages 1–7. IEEE.
Kourou, K., Exarchos, T. P., Exarchos, K. P., Karamouzis,
M. V., and Fotiadis, D. I. (2015). Machine learning ap-
plications in cancer prognosis and prediction. Compu-
tational and structural biotechnology journal, 13:8–
17.
Kr
¨
ahenb
¨
uhl, P. and Koltun, V. (2011). Efficient inference
in fully connected crfs with gaussian edge potentials.
Advances in neural information processing systems,
24:109–117.
Li, L., Dong, B., Rigall, E., Zhou, T., Donga, J., and Chen,
G. (2021). Marine animal segmentation. IEEE Trans-
actions on Circuits and Systems for Video Technology.
Liu, S., De Mello, S., Gu, J., Zhong, G., Yang, M.-H., and
Kautz, J. (2017). Learning affinity via spatial propa-
gation networks. arXiv preprint arXiv:1710.01020.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Lopez-Marcano, S., Brown, C. J., Sievers, M., and Con-
nolly, R. M. (2021). The slow rise of technology:
Computer vision techniques in fish population con-
nectivity. Aquatic Conservation: Marine and Fresh-
water Ecosystems, 31(1):210–217.
Malde, K., Handegard, N. O., Eikvil, L., and Salberg, A.-B.
(2020). Machine intelligence and the data-driven fu-
ture of marine science. ICES Journal of Marine Sci-
ence, 77(4):1274–1285.
Mallet, D. and Pelletier, D. (2014). Underwater video tech-
niques for observing coastal marine biodiversity: a re-
view of sixty years of publications (1952–2012). Fish-
eries Research, 154:44–62.
Marchesan, M., Spoto, M., Verginella, L., and Ferrero,
E. A. (2005). Behavioural effects of artificial light
on fish species of commercial interest. Fisheries re-
search, 73(1-2):171–185.
Marmanis, D., Wegner, J. D., Galliani, S., Schindler, K.,
Datcu, M., and Stilla, U. (2016). Semantic segmenta-
tion of aerial images with an ensemble of cnss. ISPRS
Annals of the Photogrammetry, Remote Sensing and
Spatial Information Sciences, 2016, 3:473–480.
Qin, H., Peng, Y., and Li, X. (2014). Foreground extraction
of underwater videos via sparse and low-rank matrix
decomposition. In 2014 ICPR Workshop on Computer
Vision for Analysis of Underwater Imagery, pages 65–
72. IEEE.
Rawat, S., Benakappa, S., Kumar, J., Naik, K., Pandey,
G., and Pema, C. (2017). Identification of fish stocks
based on truss morphometric: A review. Journal of
Fisheries and Life Sciences, 2(1):9–14.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Rosen, S. and Holst, J. C. (2013). Deepvision in-trawl imag-
ing: Sampling the water column in four dimensions.
Fisheries Research, 148:64–73.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
als and linear bottlenecks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4510–4520.
Spampinato, C., Giordano, D., Di Salvo, R., Chen-Burger,
Y.-H. J., Fisher, R. B., and Nadarajan, G. (2010). Au-
tomatic fish classification for underwater species be-
havior understanding. In Proceedings of the first ACM
international workshop on Analysis and retrieval of
tracked events and motion in imagery streams, pages
45–50.
Storbeck, F. and Daan, B. (2001). Fish species recognition
using computer vision and a neural network. Fisheries
Research, 51(1):11–15.
Tchapmi, L., Choy, C., Armeni, I., Gwak, J., and Savarese,
S. (2017). Segcloud: Semantic segmentation of 3d
point clouds. In 2017 international conference on 3D
vision (3DV), pages 537–547. IEEE.
Wilhelms, I. et al. (2013). Atlas of length-weight relation-
ships of 93 fish and crustacean species from the north
sea and the north-east atlantic. Technical report, Jo-
hann Heinrich von Th
¨
unen Institute, Federal Research
Institute for Rural . . . .
Yang, X., Zeng, Z., Teo, S. G., Wang, L., Chandrasekhar, V.,
and Hoi, S. (2018). Deep learning for practical image
recognition: Case study on kaggle competitions. In
Proceedings of the 24th ACM SIGKDD international
conference on knowledge discovery & data mining,
pages 923–931.
Yu, C., Fan, X., Hu, Z., Xia, X., Zhao, Y., Li, R., and Bai,
Y. (2020). Segmentation and measurement scheme for
fish morphological features based on mask r-cnn. In-
formation Processing in Agriculture, 7(4):523–534.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017).
Pyramid scene parsing network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2881–2890.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
164
