
Optimizing Resource Allocation in Edge-distributed Stream Processing
Aluizio Rocha Neto
1 a
, Thiago P. Silva
1
, Thais V. Batista
1
, Frederico Lopes
1
, Fl
´
avia C. Delicato
2
and Paulo F. Pires
2
1
Department of Informatics and Applied Mathematics, Federal University of RN (UFRN), 59078-970 Natal, Brazil
2
Computer Science Department, Fluminense Federal University (UFF), 24220-900 Niteroi, Brazil
Keywords:
Internet of Things, Technical Infrastructure for Services, New Trends in Internet Technology.
Abstract:
Emerging Web applications based on distributed IoT sensor systems and machine intelligence, such as in
smart city scenarios, have posed many challenges to network and processing infrastructures. For example,
environment monitoring cameras generate massive data streams to event-based applications that require fast
processing for immediate actions. Finding a missing person in public spaces is an example of these applica-
tions, since his/her location is a piece of perishable information. Recently, the integration of edge computing
with machine intelligence has been explored as a promising strategy to interpret such massive data near the
sensor and reduce the end-to-end latency of processing events. However, due to the limited capacity and
heterogeneity of edge resources, the placement of task processing is not trivial, especially when applications
have different quality of service (QoS) requirements. In this paper, we develop an algorithm to solve the
optimization problem of allocating a set of nodes with sufficient processing capacity to execute a pipeline of
tasks while minimizing the operational cost related to latency and energy and maximizing availability. We
compare our algorithm with the resource allocation algorithms (first-fit, best-fit, and worst-fit), achieving a
lower cost in scenarios with different nodes’ heterogeneity. We also demonstrate that distributing processing
across multiple edge nodes reduces latency and energy consumption and still improves availability compared
to processing only in the cloud.
1 INTRODUCTION
The increasing number of sensors in large-scale In-
ternet of Things (IoT) systems, such as in smart city
applications, has posed many challenges for the data
communication and processing infrastructures (Qiu
et al., 2016). For example, in Intelligent Surveillance
Systems (ISS) (Valera and Velastin, 2005), monitoring
cameras produce continuous streams of data that can
quickly saturate the city’s backbone. Besides, most
Web applications require near real-time data process-
ing that can identify an event of interest, and the cor-
responding action will only make sense if taken as
soon as possible. For example, the passage of a stolen
vehicle through the monitoring camera requires im-
mediate action by police forces. In this context, the
insight produced by such systems is perishable.
In the last few years, edge computing (Gar-
cia Lopez et al., 2015) combined with machine intel-
ligence techniques have been widely applied to appli-
cation domains that depend on complex, timely and
a
https://orcid.org/0000-0003-1531-1488
massive data processing (Helal et al., 2020). Edge
computing brings the computation resources closer to
the data sources - sensors - so that applications require
less network traffic and are more cloud-independent,
reducing the communication latency. However, as
resource-constrained devices, edge nodes usually per-
form only part of the burdensome processing of large-
scale data streams. For example, the recent smart vir-
tual assistants (e.g., Amazon Alexa or Google Assis-
tant) basically perform two tasks, and only the first
task (converting the audio of the command dictated by
the user into text) runs on the edge device. The second
task (interpreting the text) is performed on computers
in the cloud. In such a system, the unpredictable la-
tency of cloud communication can lead to a poor user
experience.
A promising approach to overcome the limita-
tions of individual edge devices is distributing the
stream processing among neighboring nodes (Dautov
et al., 2017), mainly when exploiting their idle ca-
pacity. Most of the time, edge devices will be wait-
ing for an event of interest to occur that would trig-
156
Neto, A., Silva, T., Batista, T., Lopes, F., Delicato, F. and Pires, P.
Optimizing Resource Allocation in Edge-distributed Stream Processing.
DOI: 10.5220/0010714700003058
In Proceedings of the 17th International Conference on Web Information Systems and Technologies (WEBIST 2021), pages 156-166
ISBN: 978-989-758-536-4; ISSN: 2184-3252
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ger the processing. Another important aspect is the
dynamic environment where edge devices are placed
(edge tier), which implies edge nodes are not always
available, unlike cloud nodes. In this way, some chal-
lenges arise when allocating resources in this tier. Be-
sides the heterogeneity of the edge nodes, applica-
tions have different quality of service (QoS) require-
ments, and the resource allocation process needs to
consider them while optimizing the resource usage at
the edge (Tocz
´
e and Nadjm-Tehrani, 2018).
In previous work (Rocha Neto et al., 2021), we
developed a distributed system for video analytics de-
signed to leverage edge computing capabilities. This
system was designed using our microservice archi-
tecture called Multilevel Information Distributed Pro-
cessing Architecture (MELINDA) (Rocha Neto et al.,
2020). By applying Multilevel Information Fusion
(MIF) (Nakamura et al., 2007) and Distributed Ma-
chine Intelligence (D-MI) (Ramos et al., 2019), we
break the burdensome processing of large-scale video
streams into smaller tasks as a workflow of data pro-
cessing. Such workflow is deployed in processors
near the stream producers, at the edge of the network.
In such a system, an Intelligence Service is a process-
ing task that can be used by multiple smart applica-
tions to process an event of interest. Face recognition
is an example of such a (micro)service in events that
require the identification of people. This shared mi-
croservice improves the system’s processing through-
put by using the idle capacity of nodes running the
intelligence service.
In this new paper, we tackle allocating a set of
fixed edge nodes to run the workflow tasks while
meeting applications’ QoS requirements. We present
an algorithm to assign functions to a group of nodes
with processing capacity to execute the workflow
while minimizing the operational cost related to la-
tency and energy and improving the system availabil-
ity. Due to the nature of the problem we are dealing
with, we need an exact approach that always ensures
the best choice of edge nodes to run the workflow. We
compared our algorithm with three well-known meth-
ods for resource allocation, namely first-fit, best-fit,
and worst-fit, and our solution consistently achieved
the best results in all the assessed metrics.
The organization of this paper is as follows. Sec-
tion 2 brings an overview of the background infor-
mation that supports the topics investigated in this
work. Section 3 presents our system model to pro-
cess video stream on distributed nodes. Section 4 for-
mulates the nodes allocation problem to process the
streams describing the objective function and the de-
veloped algorithm. Section 5 presents our algorithm’s
performance evaluation. Section 6 discusses the re-
lated work. Finally, Section 7 brings the final remarks
and future work.
2 BACKGROUND
According to (Ramos et al., 2019), moving the in-
telligence towards the IoT end-device introduces the
notion of Distributed Machine Intelligence (D-MI).
However, MI methods to detect and identify objects
of interest in images are voracious consumers of com-
putational resources. On the one hand, processing
at the network edge reduces bandwidth consumption
and latency. On the other hand, edge computing re-
sources are limited, inferior, and heterogeneous com-
pared to those found in cloud data centers, making the
resource allocation process an optimization problem.
Therefore, it is necessary to propose a new strategy
to efficiently distribute and allocate resources in edge
nodes and reasonably achieve performance similar to
cloud-based solutions.
A promising strategy to alleviate the computa-
tional burden of processing massive data streams is
to split the processing stages into tasks using the MIF
technique (Nakamura et al., 2007). Each task belong-
ing to a data abstraction level executes specific func-
tions to extract from the input data information with a
higher abstraction level. In this context, the technique
organizes the processing of image data from monitor-
ing cameras in a pipeline of different types of tasks:
perceive pixels changed (i.e., detect an object), extract
features (e.g., object’s shape, size), and yield insight
(object’s event). For an audio assistant, the processing
stages are: listen to an activation word (e.g., ”Alexa!”,
”Ok Google”), extract features (i.e., interpret the user
command), and take a decision (i.e., do what the user
asked).
Our MELINDA architecture defines the process-
ing layer as a pipeline of different types of tasks
according to the input data abstraction level. The
Measurement Level Task (MLT) deals with raw data
stream loading, decoding, and dimensionality reduc-
tion by filtering, to process only the data of interest,
like an object detected or activation word. The Fea-
ture Level Task (FLT) has the role of recognizing the
items of interest in the image captured or understand-
ing which type of command the user is asking. In the
last processing stage, the Decision Level Task (DLT)
is responsible for the decision level fusion and rea-
soning of higher-level abstractions, inferring a global
view of the events of interest. Motivated by recent ad-
vances in D-MI and AI-based edge computing (Huh
and Seo, 2019), our research group works on smart
city applications based on video analytics. We pro-
Optimizing Resource Allocation in Edge-distributed Stream Processing
157

pose running the MLT and FLT tasks on edge devices
equipped with hardware accelerators for neural net-
works to apply Deep Learning (DL) techniques when
processing the video stream. DL can produce valu-
able insights to guide the automated decision-making
processes (Mohammadi et al., 2018).
As the power source at the edge of the network
is generally quite limited, the industry has been striv-
ing to create high computational power devices while
consuming little energy. Some edge devices specially
designed for running deep learning have achieved a
better performance ratio (FPS per Watt) than cloud
nodes (Hernandez-Juarez et al., 2016). On the one
hand, cloud nodes have high availability because they
are in a highly reliable infrastructure environment.
Differently, data is at the edge, then the processor’s
availability depends on the stability of the commu-
nication between the data source (sensors) and the
cloud. Therefore, these aspects – communication la-
tency from the input data source, energy consump-
tion, and node availability – define the quality of ser-
vice requirements when choosing nodes for process-
ing the data stream.
3 SYSTEM MODEL
The MELINDA architecture (Rocha Neto et al., 2021)
splits the video stream processing into a pipeline with
three types of task: (i) the measurement level task
(MLT) filters raw video stream selecting only those
frames (images) that have the object of interest; (ii)
the feature level task (FLT), identifying the objects in
these images; and (iii) the decision level task (DLT)
interpreting the event held by the object. Each pro-
cessing layer has its task – MLT, FLT, and DLT, re-
spectively – running on different fixed node devices
and interconnected via a wired LAN or MAN net-
work.
Based on these assumptions, we developed an ap-
plication model for MELINDA. In this model, the
application requirements for video stream processing
tasks are represented through a workflow. The work-
flow creates the notion of a logical plan (de Assunc¸
˜
ao
et al., 2017) for executing tasks within a pipeline.
This pipeline is represented as a Directed Acyclic
Graph (DAG) consisting of data sources, processing
tasks, and data sinks (R
¨
oger and Mayer, 2019), as
shown in Figure 1.
The measurement level task has as input the raw
stream obtained from a set of data sources of work-
flow W
x
defined as
So
W
x
= {S
i
∀i ∈ 1.. j} (1)
where S
i
represents a stream source (camera), and j
is the number of cameras producing streams for this
workflow. The output of an MLT task for the stream
source S
i
is an image of interest message IIM
i,t
, ∀t ∈
0..∞ that is captured on time t. Each IIM
i,t
message
is received by a node as input data, processed, and
forwarded as output data. This message contains the
payload defined as
IIM
i,t
= (S
i
,t, P) (2)
where P = (img, d
1
, d
2
, ...) is the payload, defined as
a tuple containing the image of interest img and a se-
ries of data items (e.g., d
1
, d
2
, ...). Each task can add
new data items in the tuple of output messages as a
result of the input message processing. For example,
the FLT tasks add information related to object iden-
tification.
The application requesting the execution of the
workflow must inform its maximum processing de-
lay (MaxDelay) in milliseconds as a quality of service
(QoS) parameter to be met. Hence, a workflow for an
application W
x
with a set of data sources So
W
x
is rep-
resented as
W
x
= {So
W
x
, MLT
W
x
, FLT
W
x
, DLT
W
x
, MaxDelay
W
x
}
(3)
where FLT
W
x
might be an instance of FLT
IS
. The
tasks will be instantiated to run on a set of edge nodes
when deploying the workflow.
3.1 Deploying Workflows
The tasks will be instantiated to run on a set of edge
nodes when deploying the workflow. Each cam-
era produces a certain quantity of frames per second
(FPS) as a known parameter. Thus, the required pro-
cessing capacity to process all streams of a workflow
W
x
is represented by function Flow(W
x
) as the sum of
FPS of each camera.
Flow(W
x
) =
j
∑
i=1
S
i
:: FPS (4)
The set of all edge nodes is defined as
EN = {e
i
∀i ∈ 1..n} (5)
where n is the number of edge nodes registered on the
Processing Node Manager component, a component
of MELINDA architecture (Rocha Neto et al., 2020).
The links among edge nodes are represented by
L = {(e
i
, e
j
)}, ∀i, j ∈ 1..n ∧e
i
, e
j
∈ EN (6)
From EN, we have two subsets: the subset of al-
located nodes defined as
AN = {e
i
∀i ∈ 1..λ} (7)
WEBIST 2021 - 17th International Conference on Web Information Systems and Technologies
158

Figure 1: Application’s Workflow.
and the subset of idle nodes denoted as
IN = {e
i
∀i ∈ 1..β}, having λ + β = n (8)
The node selection algorithm is executed when
a new application submits its workflow to the sys-
tem. For a given workflow W
x
, the Orchestrator (a
component of MELINDA architecture) must choose
a set of edge nodes that can run the set of tasks
{MLT
W
x
, FLT
W
x
, DLT
W
x
}. An operator is the imple-
mentation of a processing task that runs on an edge
node. In this way, we have measurement level op-
erator (MLO), feature level operator (FLO), and de-
cision level operator (DLO). MLO and FLO opera-
tors perform deep learning (DL) tasks to detect and
identify objects of interest in messages IIM
i,t
, respec-
tively. So, to achieve low processing delays, these op-
erators run on edge nodes EN
DL
⊆ EN equipped with
hardware accelerators optimized for neural networks.
The set of edge nodes EN
DL
have different image
processing capacities measured in FPS. This capacity
is associated with the DL task running on a specific
node. Without loss of generality, we can assume that
every image in IIM
i,t
∀t = 0..∞ has the same resolu-
tion and takes the same processing time on a given
node e
k
. Therefore function Capacity(e
k
,task) re-
turns the capacity in FPS of node e
k
running task.
To guarantee this capacity, a node must only execute
one DL task per time. The reason for exclusive use
is that this type of processing generally consumes all
available hardware resources. The available idle ca-
pacity is given by function IC as the smallest value
between the sums of capacities of nodes U for MLT
W
X
and nodes V for FLT
W
X
, having U ∪V = IN. The for-
mal notation for function IC is given in equation (9)
where α and γ are the sizes of U and V , respectively,
and α + γ = β.
IC(W
x
) = min(
α
∑
i=1
Capacity(u
i
, MLT
W
x
),
γ
∑
j=1
Capacity(v
j
, FLT
W
x
)) (9)
IC(W
x
) ≥ Flow(W
x
) (10)
The allocation of nodes should ensure that there
will be no bottlenecks in the workflow processing that
could lead to a steady increase in delays. If condition
(10) is not satisfied, then the workflow W
x
demands
processing capacity not available with the current set
of idle edge nodes, and the application’s request to
process W
x
will be declined. Otherwise, if (10) is true
then there are two sets U
0
⊆ U and V
0
⊆ V of edge
nodes that can process the workflow W
x
. In such a
case, the orchestrator allocates the edge nodes to exe-
cute workflow W
x
as E
W
x
= {U
0
∪V
0
}. Formally,
E
W
x
⊆ IN|E
W
x
= {E
MLO
W
x
∪ E
FLO
W
x
∪ E
DLO
W
x
} (11)
where E
MLO
W
x
, E
FLO
W
x
, and E
DLO
W
x
is the set of edge nodes
chosen to run MLT
W
x
, FLT
W
x
, and DLT
W
x
, respec-
tively.
3.2 Workload Distribution
Requesting the execution of a workflow to meet an ap-
plication requires the allocation of several edge nodes
to distribute the processing tasks of the associated
video streams. In this work, the node allocation rep-
resents a Deployment Plan. The allocation of image
processing tasks to nodes must meet the requirements
of low delay and maximum throughput, promoting
the usage of all the computational capacity of the allo-
cated nodes. According to (Dayarathna et al., 2016),
energy waste is mainly caused by nodes working in
idle state. Therefore, the ideal deployment plan is one
that respects the processing capacity of each node and
simultaneously processes an adequate number of im-
ages flow for that set of allocated nodes.
The workflow deployment plan is a strategy for
creating a distributed processing infrastructure, sim-
ilar to a cluster. As in most cluster frameworks for
on-demand processing, a load balancing algorithm
is necessary to guarantee the best throughput. Only
when some MLO node produces an image of interest,
a FLO node processes this image. To prevent overload
in FLO nodes and avoid bottlenecks in the processing
flow, we have developed a load balancing mechanism
for making the best possible usages of the available
resources at these nodes.
Our load balance approach uses the pattern pro-
ducer → worker → consumer of messages queue. We
created a microservice operator as a broker to control
Optimizing Resource Allocation in Edge-distributed Stream Processing
159

the load balancing. Figure 2 shows the workflow or-
ganization. MLO nodes are message producers, FLO
nodes are workers, and a DLO is the final consumer
of the processing flow. Since the broker and the DLO
operator’s tasks are lightweight processes compared
to those of the MLO and FLO operators, the broker
and DLO operator will be running on the same edge
node.
The broker uses two FIFO (First In, First Out)
message queues, one to receive all messages produced
by the MLO nodes (producers) and the other to for-
ward them to the final consumer, the DLO node. The
producers feed the input queue, and the broker de-
livers the messages in the output queue to the con-
sumer using the PUSH-PULL messaging pattern. The
broker’s communication with workers is through the
REQUEST-REPLY pattern. In this case, the broker is
a client of the workers’ processing microservice, re-
questing the messages in the input queue and putting
the replies in the output queue. As the worker nodes
can have different processing capacities, the process-
ing of a message in a given node cannot delay pro-
cessing the next message in the queue. Thus, we use
the thread-based parallelism technique to treat the var-
ious messages in the input queue. There will be one
thread to communicate with each worker node. The
thread that connects to a fast worker will have its re-
ply before the others so that it will be able to read
and forward more messages than a thread with that
slower node. We detail the load balance algorithm in
(Rocha Neto et al., 2021).
4 THE RESOURCE ALLOCATION
ALGORITHM
This Section presents our algorithm to select nodes
to execute an image processing workflow denoted as
Flow(W
x
). This algorithm decides which nodes allo-
cate to run a workflow task (MLT or FLT) with the
lowest operational cost while respecting each node’s
limitations. We called a solution K
task
j
any set of
nodes e
i
∈ IN that can run task attending the workflow
demand Flow(W
x
). The set of all available nodes that
can run task is a solution, but this solution is probably
the most costly since it uses all disengaged resources.
Thus, we have an optimization problem to find nodes
with the lowest operational cost to meet the workflow
processing capacity demand. Our objective function
is to minimize resource allocation costs, and our con-
straint is the sum of nodes’ processing capacity being
greater or equal to the workflow demand.
We define some metrics to evaluate node re-
sources. Regarding the latency, we considered the
processing and network delays. Using hardware
accelerators for neural networks, edge nodes can
achieve processing latency near-equivalent to cloud-
hosted nodes. Besides, the edge nodes’ network-
proximity with data source (sensors) tends to gener-
ate less transmission delays compared to nodes on the
cloud, compensating the longer processing delay. The
processing capacity c
i
of node e
i
to execute a task is
defined as
c
i
= Capacity(e
i
,task),
∀e
i
∈ EN
DL
,task ∈ {MLT, FLT } (12)
that informs the number of frames per second e
i
can
process for that task. For example, a node that can
process 20 FPS has a processing delay of 1/20 =
0.050, i.e., 50 ms to process each image.
To measure the network latency of a processor e
i
,
we define l
i
as
l
i
= Latency(e
s
, e
i
), ∀e
s
, e
i
∈ EN
DL
(13)
where e
s
is the input data source node for e
i
. This
function checks how much time (in milliseconds) it
takes a message hop from e
s
to e
i
.
We define function Energy(e
i
,task) to measure e
i
the energy consumption in Watt per FPS for running
task. Hence,
w
i
= Energy(e
i
,task),
∀e
i
∈ EN
DL
,task ∈ {MLT, FLT } (14)
is the variable to denote this consumption.
Function Availability(e
i
) calculates the availabil-
ity a
i
of a node e
i
. This function returns the ratio of
the up (available) time to the aggregated values of up
and down (not available) time, i.e.,
a
i
=
e
i
:: uptime
e
i
:: uptime + e
i
:: downtime
, ∀e
i
∈ EN (15)
where 0 ≤ a
i
≤ 1 and a
i
= 1 means e
i
was available
100% of the time. The cluster availability (CA) which
all nodes work in parallel (Tsai and Sang, 2010) is
defined as
CA = 1 −
n
∏
i=1
(1 − a
i
) (16)
4.1 Objective Function
The proposed algorithm aims to select a set of nodes
with sufficient capacity to process a workflow with
minimal cost. The cost is determined by capacity
waste (exceeding the workflow demand), network la-
tency from the input data source to the node, node en-
ergy consumption to process the messages, and node
unavailability. The unavailability is the complement
WEBIST 2021 - 17th International Conference on Web Information Systems and Technologies
160

Figure 2: Workload distribution (Rocha Neto et al., 2021).
of the availability. Based on these criteria, equation
(17) provides our objective function for solving the
node allocation problem. We aim to achieve the low-
est operational cost (OC) as long as the nodes’ pro-
cessing capacity is sufficient to handle a workflow.
minimize OC = A(
∑
c
i
x
i
− Flow(W
x
)) +
B(max(l
i
x
i
)) +C(
∑
w
i
x
i
) +
D(
∏
(1 − a
i
x
i
))
subject to
∑
c
i
x
i
≥ Flow(W
x
) (17)
where
x
i
=
(
1, if e
i
is selected, ∀e
i
∈ IN ∧ c
i
> 0
0, otherwise
A, B, C, and D are coefficients that represent the
unit costs of each metric evaluated to meet the appli-
cation’s QoS requirements. Coefficient A defines the
cost for wasted capacity when the aggregate capac-
ity of selected nodes exceeds the capacity demanded
by the workflow. B, C, and D represent the costs for
network latency, energy consumption, and cluster un-
availability, respectively.
4.2 Optimizing Nodes Selection
To optimize the resource allocation choosing the best
solution, we have to define a brute-force search that
consists of systematically enumerating all possible
candidates for the solution and checking whether each
candidate satisfies the problem’s statement (equation
(17)). Thus, we developed an algorithm consisting
of two functions: (i) first, it returns subsets of nodes
(combinations as candidate solutions) attending the
objective function constraint; (ii) for each subset (can-
didate), it calculates OC and returns the solution that
has the lowest cost.
Algorithm 1 represents the step (i) creating func-
tion Solutions that returns a set of nodes subsets that
can meet the workflow demand ( f ps
demand) as can-
didate solutions. First, the set of nodes is sorted ac-
cording to their processing capacity (line 2). Two
loops will then evaluate the combinations of a given
node (pivot) with the following nodes in decreasing
order of capacity until the sum of capacity is greater
than or equal to the requested capacity (lines 5–22).
If pivot capacity is equal to or greater than the work-
flow demand (line 8), this node itself is a solution.
Otherwise, we test adding the capacity of the follow-
ing nodes (lines 11–20). We obtain a solution when
the added capacity is sufficient (line 13). Still, the last
verified node i is not inserted in the partial variable
(lines 14–15), allowing to check other nodes in the
sequence that can fit the remaining capacity.
Step (ii) is performed by function SelectNodes in
Algorithm 2. Its parameters are: IN is the list of idle
nodes; T is the image processing task (MLT or FLT)
the nodes will execute; F is the workflow demand
in FPS; IDS is the input data source to calculate the
transmission latency; and A, B, C, and D are weights
defined according to the priority given by the appli-
cation to the different QoS parameters. After call-
ing function Solutions, this algorithm checks the cost
of each solution and selects the one with the lowest
value.
While a brute-force search is simple to implement
and will always find a solution if it exists, its cost
is proportional to the number of candidate solutions,
which in our case tends to overgrow as the quantity of
Optimizing Resource Allocation in Edge-distributed Stream Processing
161

1 Function Solutions(nodes, f ps demand)
2 nodes ← sorted(nodes, key=c,
reverse=True)
3 solutions ←
/
0
4 k ← length(nodes)
5 for pivot ← 1 to k do
6 sumcap ← nodes[pivot] :: c
7 partial ← {nodes[pivot]}
8 if sumcap ≥ f ps demand then
9 solutions ← solutions ∪ partial
10 else
11 for i ← pivot + 1 to k do
12 cap ← sumcap + nodes[i] :: c
13 if cap ≥ f ps demand then
14 solution ←
partial ∪ {nodes[i]}
15 solutions ←
solutions ∪ solution
16 else
17 sumcap += nodes[i] :: c
18 partial ←
partial ∪ {nodes[i]}
19 return solutions
Algorithm 1: Selecting candidate solutions.
nodes increases. Algorithm 1 has an asymptotic
computational complexity of O(n log n) + O(n
2
).
O(n log n) is associated with the process of sorting
the nodes list (line 2), and O(n
2
) the two for-loop
to create the solutions space (lines 5–22). Generally,
heuristic algorithms are asymptotically better than ex-
act algorithms like this one, but they do not always
guarantee the best solution. As the number of nodes
tends to be limited, we can assume that our solution
has an acceptable computational time. For example,
considering a realistic scenario with 80 nodes avail-
able for processing, the algorithm took just 1.2 sec-
onds running on a Raspberry Pi 4 (4GB RAM) to
yield all workflows’ set of nodes to meet the given
application demand. The first workflow arrangement,
which has all 80 nodes available, had 1,617 candidate
solutions.
5 EVALUATION
To evaluate the performance of MELINDA architec-
ture, we developed an intelligent application to assess
the processing time of running deep learning algo-
rithms on edge nodes (Rocha Neto et al., 2021). The
processing times were analyzed using real edge de-
vices equipped with accelerators for neural networks.
Once obtaining the operators’ processing times, we
1 Function
SelectNodes(IN, task, F, IDS, A, B,C, D)
2 nodes ← {e
1
..e
β
}, ∀e
i
∈
IN ∧Capacity(e
i
,task) > 0
3 K
task
← Solutions(nodes, F)
4 if length(K
task
) > 0 then
5 best cost ← ∞
6 best sol ← 0
7 for j ← 1 to length(K
task
), ∀e
i
∈ K
task
j
do
8 c
i
= Capacity(e
i
,task)
9 l
i
= Latency(IDS, e
i
)
10 w
i
= Energy(e
i
,task)
11 a
i
= Availability(e
i
)
12 cost ←
A(
∑
(c
i
) − F) + B(max(l
i
)) +
C(
∑
w
i
) + D(
∏
(1 − a
i
))
13 if cost < best cost then
14 best cost ← cost
15 best sol ← j
16 return K
task
[best sol]
17 else
18 return
/
0
Algorithm 2: Selecting the best candidate.
used them in the YAFS simulator (Lera et al., 2019)
to scale up for a scenario with dozens of cameras and
processing nodes. With this simulator, we could eval-
uate MELINDA procedures meeting high-throughput
requirements in video analytics on the edge tier. The
scenario used as a running example consists of an
intelligent building with cameras scattered in open
spaces monitoring circulation. Edge nodes are in the
same camera’s network and equipped with hardware
accelerators for Edge AI (Lee et al., 2018). The re-
source allocation algorithm decides which nodes al-
locate to run a workflow task (MLT or FLT) with the
lowest operational cost while respecting each node’s
limitations. Although the application domain is im-
age processing in edge devices with DL accelerators,
this algorithm can be applied to any distributed pro-
cessing application running on nodes with different
processing capacities.
To assess our algorithm’s ability to choose nodes
with sufficient capacity to process an application
workflow, we evaluated its performance by analyzing
two aspects: (i) its ability for choosing the combi-
nation of nodes with the lowest operational cost to
attend a workflow; and (ii) its skill to arrange more
workflows with the same set of available nodes. We
run a set of experiments that vary the nodes’ features
(processing capacity, communication latency from
data source, energy consumption, and node availabil-
WEBIST 2021 - 17th International Conference on Web Information Systems and Technologies
162
ity) for assessing each of these two aspects. We com-
pared the results with three well-known resource allo-
cation algorithms: first-fit, best-fit, and worst-fit. We
have not compared our algorithm with other works
(including some described in Section 6) because we
have not found a similar algorithm that jointly uses
the same metrics, thus preventing a fair compari-
son. Energy consumption and availability, for ex-
ample, are generally not considered in task place-
ment approaches as they historically run in powerful
and high-reliability environments, as is the case with
cloud data centers.
As algorithms’ data input, the features of each
node are in a tuple: (capacity in FPS, latency in ms,
energy in Watts / FPS, availability in percentage). The
tuples of all nodes are in a non-ordered array. The al-
gorithms’ objective is to select a set of nodes in which
the sum of processing capacity is greater or equal to
the workflow demand. In the first-fit approach, the al-
gorithm selects nodes as it reads the array until nodes’
capacity sum is equal to or greater than what is re-
quired by the workflow. Best-fit and worst-fit are sim-
ilar to first-fit; the difference is ordering the array by
the node capacity in descending (best-fit) and ascend-
ing (worst-fit) order before selecting each node. On
the other hand, our algorithm searches for all candi-
date solutions (any nodes combination attending the
constraint) and chooses the one with the lowest oper-
ational cost in terms of the best capacity fit and QoS
criteria.
There is a direct relationship between process-
ing capacity and energy consumption. In our exper-
iments, the capacity (in FPS) and energy (in Watts /
FPS) data come from the evaluations in (Hernandez-
Juarez et al., 2016), where authors compared the
edge-based device NVIDIA Tegra X1 (10 Watts TDP)
with the powerful cloud-based NVIDIA Titan X (250
Watts TDP). Titan X achieved 3.54 FPS / Watt,
while Tegra X1 obtained 8.12 FPS / Watt. We ap-
plied these relations (inverting to Watts / FPS) in
our data array and vary the capacity per energy con-
sumption proportionally. Latency (in milliseconds)
and availability (uptime percentage) data are ran-
dom but based on our experiments using edge and
cloud nodes (Rocha Neto et al., 2021). The simula-
tion testbed used in these experiments is available in
https://github.com/aluiziorocha/MELINDA.
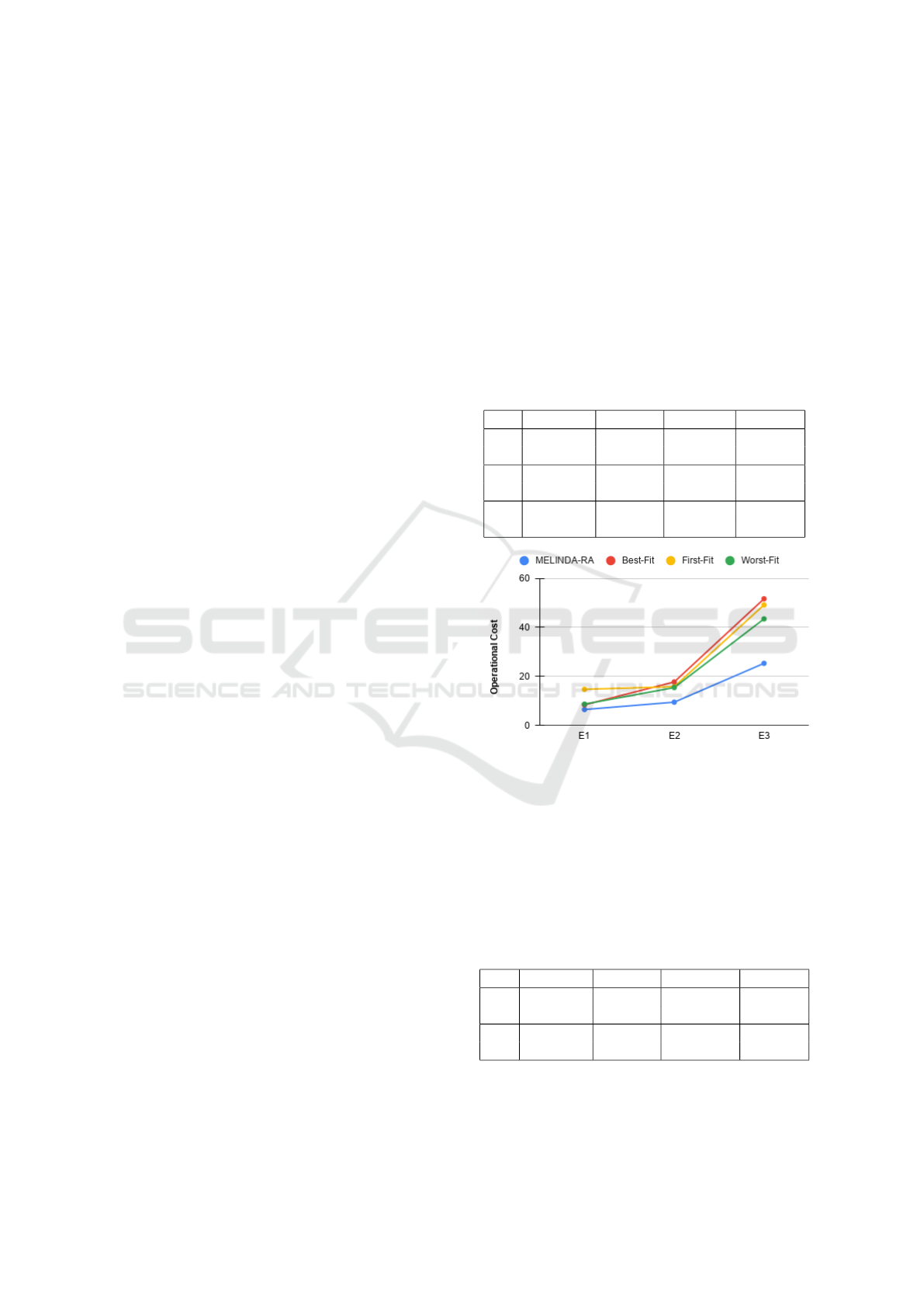
We performed three experiments (E1 to E3) to
evaluate the aspect (i) for each algorithm with dif-
ferent node sets. Each experiment represents a sce-
nario with varying degrees of node heterogeneity. Ta-
ble 1 shows the data for twenty nodes used in each
experiment, ranging from low (E1) to high (E3) de-
gree of heterogeneity. SD is the standard deviation,
i.e., the variation or dispersion of the set of val-
ues. In each experiment, the node allocation algo-
rithm should choose a set of nodes that could pro-
cess a workflow with a demand of 200 FPS. Fig-
ure 3 presents the operational cost calculated for
each algorithm and experiment. We named our al-
gorithm MELINDA-RA. As the nodes’ heterogene-
ity increases, MELINDA-RA becomes more efficient
since it finds the nodes whose capacities best fit the
remaining total. The other algorithms tend to choose
nodes whose capacity is much greater or lower than
that needed to meet the demand.
Table 1: Node heterogeneity in three experiments.
Capacity Latency Energy Availab.
E1 25 - 35 2 - 6 2.5 - 3.5 0.8 - 0.9
SD 3.753 1.352 0.375 0.02961
E2 20 - 40 2 - 10 3.1 - 6.0 0.6 - 0.9
SD 6.087 2.495 0.913 0.09324
E3 10 - 90 2 - 70 3.9 - 27.0 0.2 - 0.9
SD 25.761 21.597 7.728 0.17961
Figure 3: Operational cost for each method of allocating
nodes.
To evaluate the operational cost of edge, cloud,
and hybrid solutions, we also conducted some alloca-
tion tests in three scenarios: all nodes are edge de-
vices, all nodes are cloud computers and a mix of
both. Table 2 presents the data for twenty edge nodes
and twenty cloud nodes used in these tests, in which
the processing capacity demand is also 200 FPS.
Table 2: Edge and cloud nodes data.
Capacity Latency Energy Availab.
Ed. 25 - 35 2 - 6 3.1 - 4.3 0.7 - 0.8
SD 4.069 1.108 0.502 0.03194
Cl. 80 - 90 60 - 70 22.5 - 25.5 0.8 - 0.9
SD 2.555 2.937 0.721 0.02834
Figure 4 shows the maximum latency from the in-
put data source to the processing node in the cluster.
Solutions with only edge nodes are the ones that ob-
Optimizing Resource Allocation in Edge-distributed Stream Processing
163
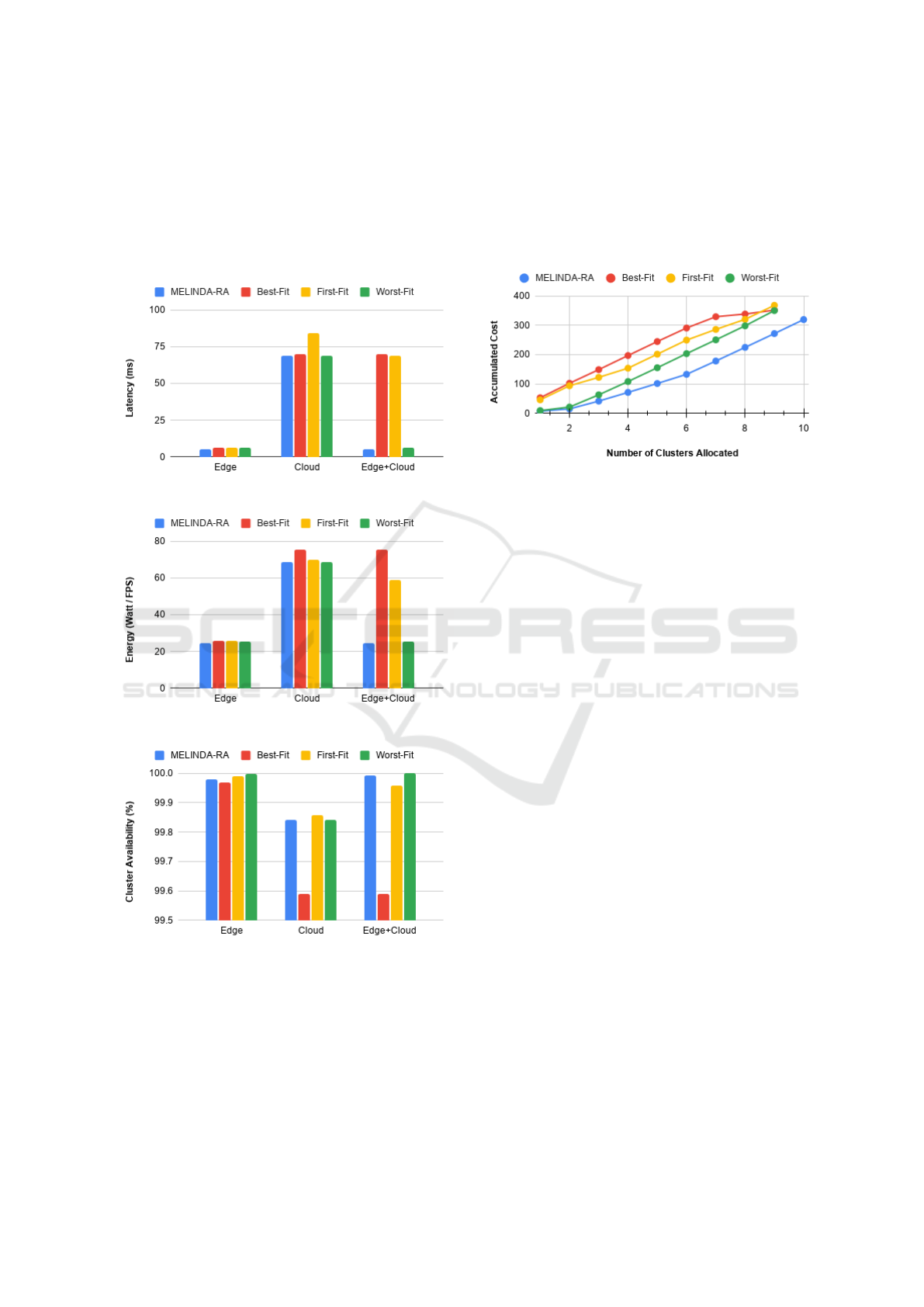
tain the lowest latency since the processors are close
to the data sources - the sensors. Figure 5 shows the
cluster’s total energy consumption by each method,
delivering the best results for the edge node solutions.
Figure 6 presents the availability of each cluster of
nodes. A more significant number of edge nodes out-
performs the better availability of fewer nodes cloud.
Figure 4: Comparing latency using edge and cloud nodes.
Figure 5: Energy consumption comparison.
Figure 6: Cluster availability for edge and cloud nodes.
Finally, we evaluate the aspect (ii) related to
allocating the largest number of workflows with
the same set of available nodes. The most efficient
algorithm is the one that distributes more workflows
and leaves fewer idle nodes. For this test, we used
the forty nodes’ hybrid solution in Table 2 with a
total processing capacity of 2,293 FPS. Then we ran
the algorithms to allocate the maximum number of
clusters, each one demanding 200 FPS for processing.
Figure 7 shows the accumulated cost for the number
of sets given. MELINDA-RA was the only one that
managed to allocate ten groups using all available
nodes. The other algorithms left nodes since their
processing capacity sum did not reach 200 FPS.
Figure 7: Allocating clusters with all available nodes.
6 RELATED WORK
In this Section, we present works dealing with dis-
tributed data stream processing in heterogeneous en-
vironments (Lahmar and Boukadi, 2020). The main
goal in most work is assigning nodes to meet a pro-
cessing demand imposed by a data stream. Amaras-
inghe et al., (Amarasinghe et al., 2018) proposes an
optimization framework that models the placement
scenario of data stream processing applications as
a constraint satisfaction problem (CSP). The frame-
work chooses the edge and cloud nodes to process the
data stream, considering nodes’ combination to min-
imize energy consumption and network latency. Al-
though the work considers edge and cloud nodes, the
lack of availability requirement, as a node choice al-
gorithm parameter, may make the solution unfeasible
in scenarios where some nodes may have a low degree
of availability.
Ghosh and Simmhan (Ghosh and Simmhan, 2018)
propose a genetic algorithm for distributing event-
based analytics tasks across edge and Cloud resources
to support IoT applications. They tacked the distribu-
tion of tasks as a constrained optimization problem.
The objective function was to minimize the end-to-
end processing latency regarding the constraints of
throughput capacity, bandwidth and latency limits of
the network, and energy capacity of the edge devices.
The authors modeled the placement strategy so that
every sink node is on the cloud, making the solution
unfeasible for some scenarios where the result of pro-
cessing a stream needs to be sent to an end-device at
the network edge. Moreover, the work does not con-
WEBIST 2021 - 17th International Conference on Web Information Systems and Technologies
164

sider availability as a constraint when choosing nodes.
Zeng et al. (Zeng et al., 2016) formulated the task
allocation and completion time minimization problem
as a Mixed-Integer Nonlinear Programming Problem
(MINLP). The main goal is to minimize the com-
pletion time of tasks distributing them between edge
nodes and end devices (clients) regarding load bal-
ancing. Some tasks are processed on clients for faster
response time. They proposed a heuristic algorithm
based on the MINLP formulation to minimize the
computation, transmission, and I/O time related to
the tasks’ execution, disregarding other QoS require-
ments such as availability and energy consumption.
In (Yang et al., 2020), authors propose an adaptive
multi-objective optimization task scheduling method
where the total execution time and the task resource
cost in the fog network are taken as the optimiza-
tion target of resource allocation. However, the op-
erational cost related to using the set of edge nodes
is calculated using just one QoS requirement. There-
fore, it can not effectively meet the multi-objective
requirements in real scenarios. Conversely, our pro-
posal considers four QoS requirements to derive the
operational cost. We also believe node availability is
an essential factor in node choice since edge/fog net-
works can suffer unpredictable instability.
Deng et al. (Deng et al., 2020) presents two algo-
rithms and a model for video analysis task allocation
in the mobile edge computing environment. The first
one is a multi-round allocation algorithm based on
Exponential Moving Average (EMA) prediction used
when historical data cannot be obtained. On the other
hand, when long-term historical data is available, a
task online assignment algorithm is used based on the
reinforcement learning method (Q learning). In this
work, the available resources and capabilities of edge
nodes are not known a priori. Therefore the algo-
rithms need to estimate the capacities of edge nodes
to assign appropriate workload to them. Unlike our
approach, operational cost is defined as cost per unit
of time, and the resource allocation algorithm does
not consider the availability and energy consumption
of nodes.
7 CONCLUSIONS
This paper presented an algorithm to allocate a set of
nodes for data streams distributed processing. The
algorithm performs an exhaustive search for the best
nodes combination considering the QoS requirements
communication latency from the data source, energy
consumption, and cluster availability. We evaluated
the algorithm with well-known methods of resource
allocation, and it achieved the best results always. We
also compared the choice of a set of edge nodes with
one of the cloud nodes. The edge set had several ad-
vantages, including better availability of the cluster by
having more nodes available.
As future work, we intend to improve the worker
nodes allocation process since the arrival of an image
of interest to this node depends on the device sensor’s
events. Even applying the worker task’s reuse as a
shareable Intelligence Service, their idleness can be
relatively high. Thus, the ideal solution would be to
predict events on each sensor according to their his-
tory within a time window. In this context, a promis-
ing approach is machine learning techniques for pat-
tern recognition in time-series data. With each camera
stream event pattern represented as a time window,
it is possible to predict the event rate and adjust the
number of workers accordingly.
Finally, advances in edge computing devices’ de-
velopment have made them smaller, more powerful,
and less energy-consuming. Besides, such devices’
collaboration has shown to be a promising approach
to overcome their limitations and achieve results sim-
ilar to the powerful processing nodes in the cloud.
ACKNOWLEDGEMENTS
This work is partially funded by CNPq (grant number
308274/2016-4) and by FAPESP (grant 2015/24144-
7). Professors Thais Batista, Flavia Delicato, and
Paulo Pires are CNPq Fellows.
REFERENCES
Amarasinghe, G., de Assunc¸
˜
ao, M. D., Harwood, A., and
Karunasekera, S. (2018). A data stream processing
optimisation framework for edge computing applica-
tions. In 2018 IEEE 21st International Symposium
on Real-Time Distributed Computing (ISORC), pages
91–98, Singapore. IEEE.
Dautov, R., Distefano, S., Bruneo, D., Longo, F., Mer-
lino, G., and Puliafito, A. (2017). Pushing intelli-
gence to the edge with a stream processing architec-
ture. In 2017 IEEE International Conference on Inter-
net of Things (iThings) and IEEE Green Computing
and Communications (GreenCom) and IEEE Cyber,
Physical and Social Computing (CPSCom) and IEEE
Smart Data (SmartData), pages 792–799, Exeter, UK.
IEEE.
Dayarathna, M., Wen, Y., and Fan, R. (2016). Data center
energy consumption modeling: A survey. IEEE Com-
munications Surveys Tutorials, 18(1):732–794.
de Assunc¸
˜
ao, M. D., Veith, A. D. S., and Buyya, R.
(2017). Resource elasticity for distributed data stream
Optimizing Resource Allocation in Edge-distributed Stream Processing
165

processing: A survey and future directions. CoRR,
abs/1709.01363.
Deng, X., Li, J., Liu, E., and Zhang, H. (2020). Task alloca-
tion algorithm and optimization model on edge collab-
oration. Journal of Systems Architecture, 110:101778.
Garcia Lopez, P., Montresor, A., Epema, D., Datta, A., Hi-
gashino, T., Iamnitchi, A., Barcellos, M., Felber, P.,
and Riviere, E. (2015). Edge-centric computing: Vi-
sion and challenges. SIGCOMM Comput. Commun.
Rev., 45(5):37–42.
Ghosh, R. and Simmhan, Y. (2018). Distributed scheduling
of event analytics across edge and cloud. ACM Trans.
Cyber-Phys. Syst., 2(4).
Helal, S., Delicato, F. C., Margi, C. B., Misra, S., and
Endler, M. (2020). Challenges and opportunities for
data science and machine learning in iot systems - a
timely debate: Part 1. IEEE Internet of Things Maga-
zine, 4(1):2–8.
Hernandez-Juarez, D., Chac
´
on, A., Espinosa, A., V
´
azquez,
D., Moure, J., and L
´
opez, A. (2016). Embedded real-
time stereo estimation via semi-global matching on
the gpu. Procedia Computer Science, 80:143–153.
Huh, J.-H. and Seo, Y.-S. (2019). Understanding edge com-
puting: Engineering evolution with artificial intelli-
gence. IEEE Access, 7:164229–164245.
Lahmar, I. B. and Boukadi, K. (2020). Resource alloca-
tion in fog computing: A systematic mapping study.
In 2020 Fifth International Conference on Fog and
Mobile Edge Computing (FMEC), pages 86–93, Paris,
France. IEEE.
Lee, Y.-L., Tsung, P.-K., and Wu, M. (2018). Techology
trend of edge ai. In 2018 International Symposium on
VLSI Design, Automation and Test (VLSI-DAT), pages
1–2.
Lera, I., Guerrero, C., and Juiz, C. (2019). Yafs: A simula-
tor for iot scenarios in fog computing. IEEE Access,
7:91745–91758.
Mohammadi, M., Al-Fuqaha, A., Sorour, S., and Guizani,
M. (2018). Deep learning for iot big data and stream-
ing analytics: A survey. IEEE Communications Sur-
veys Tutorials, 20:2923–2960.
Nakamura, E. F., Loureiro, A. A. F., and Frery, A. C.
(2007). Information fusion for wireless sensor net-
works: Methods, models, and classifications. ACM
Comput. Surv., 39(3):9–es.
Qiu, J., Wu, Q., Ding, G., Xu, Y., and Feng, S. (2016). A
survey of machine learning for big data processing.
EURASIP J. Adv. Sig. Proc., 2016:67.
Ramos, E., Morabito, R., and Kainulainen, J. (2019). Dis-
tributing intelligence to the edge and beyond [research
frontier]. IEEE Computational Intelligence Magazine,
14(4):65–92.
Rocha Neto, A., Silva, T. P., Batista, T., Delicato, F. C.,
Pires, P. F., and Lopes, F. (2021). Leveraging edge
intelligence for video analytics in smart city applica-
tions. Information, 12(1).
Rocha Neto, A., Silva, T. P., Batista, T. V., Delicato, F. C.,
Pires, P. F., and Lopes, F. (2020). An architecture for
distributed video stream processing in IoMT systems.
Open Journal of Internet Of Things (OJIOT), 6(1):89–
104.
R
¨
oger, H. and Mayer, R. (2019). A comprehensive survey
on parallelization and elasticity in stream processing.
ACM Comput. Surv., 52(2).
Tocz
´
e, K. and Nadjm-Tehrani, S. (2018). A taxonomy for
management and optimization of multiple resources
in edge computing. CoRR, abs/1801.05610.
Tsai, D. and Sang, H. (2010). Constructing a risk
dependency-based availability model. In 44th Annual
2010 IEEE International Carnahan Conference on
Security Technology, pages 218–220, San Jose, CA,
USA. IEEE.
Valera, M. and Velastin, S. A. (2005). Intelligent distributed
surveillance systems: a review. IEE Proceedings - Vi-
sion, Image and Signal Processing, 152(2):192–204.
Yang, M., Ma, H., Wei, S., Zeng, Y., Chen, Y., and Hu,
Y. (2020). A multi-objective task scheduling method
for fog computing in cyber-physical-social services.
IEEE Access, 8:65085–65095.
Zeng, D., Gu, L., Guo, S., Cheng, Z., and Yu, S. (2016).
Joint optimization of task scheduling and image place-
ment in fog computing supported software-defined
embedded system. IEEE Transactions on Computers,
65(12):3702–3712.
WEBIST 2021 - 17th International Conference on Web Information Systems and Technologies
166
