
Augmented Reality and Affective Computing on the Edge Makes
Social Robots Better Companions for Older Adults
Taif Anjum, Steven Lawrence and Amir Shabani
School of Computing, University of the Fraser Valley, British Columbia, Canada
Keywords: Affective Computing, Social Companion Robots, Socially-Assistive Robots, Augmented Reality, Edge
Computing, Embedded Systems, Deep Learning, Age-Friendly Intendent Living, Smart Home Automation.
Abstract: The global aging population is increasing rapidly along with the demand for care that is restricted by the
decreasing workforce. World Health Organization (WHO) suggests the development of smart, physical, social,
and age-friendly environments will improve the quality of life for older adults. Social Companion Robots
(SCRs) integrated with different sensing technologies such as vision, voice, and haptic that can communicate
with other smart devices in the environment can allow for the development of advanced AI solutions towards
an age-friendly, assistive smart space. Such robots require the ability to recognize and respond to human affect.
This can be achieved through applications of affective computing such as emotion recognition through speech
and vision. Performing such smart sensing using state-of-the-art technologies (i.e., Deep Learning) at the
edge can be challenging for mobile robots due to limited computational power. We propose to address this
challenge by off-loading the Deep Learning inference to edge hardware accelerators which can minimize the
network latency and privacy/cybersecurity concerns of alternative cloud-based options. Additionally, to
deploy SCRs in care-home facilities we require a platform for remote supervision, assistance, communication,
and technical support. We propose the use of Augmented Reality (AR) smart glasses to establish such a central
platform that will allow one single caregiver to assist multiple older adults remotely.
1 INTRODUCTION
The global aging population is increasing at a rate
faster than ever. According to the World Health
Organization (WHO), the world’s aging population
aged 60 years and older is expected to total 2 billion
by 2050, up from 900 million in 2015 (Steverson,
2018). The demand for care is increasing while the
supply is restricted due to the decreasing workforce.
WHO suggests that the development of smart,
physical, social, and age-friendly environments will
improve the quality of life for older adults (Ionut, et
al., 2020). To make the living space more
personalized, connected and socially amenable, such
environment could utilize advances in Artificial
Intelligence (AI) and robotics such as Social
Companion Robots (SCRs) (Mitchinson & Prescott,
2016)) and computer vision for scene understanding
through human motion tracking (Ghaeminia,
Shabani, & Shokouhi 2010), objects relationship
(Shabani & Matsakis 2012) and monitoring human
daily activities (Shabani, Clausi, & Zelek 2011- 2013)
when integrated with smart home automations such
as intelligent occupancy (Luppe & Shabani, 2017),
and smart ventilation (Forest & Shabani, 2017).
Augmented Reality (AR) through smart glasses
has become a widely popular multidisciplinary
research field over recent years in a wide range of
fields such as healthcare (Sheng, Saleha, &
Younhyun, 2020), military, manufacturing,
entertainment, games, educations, teleoperation and
robotics (Varol, 2020). However, the literature lacks
research of AR with SCRs for elderly care. AR gives
the real-time view of our physical world with the
addition of interactable computer generated objects.
AR can be experienced with mobile displays,
computer monitors and Head-Mounted Displays
(HMDs). In the recent years, AR smart glasses such
as Microsoft HoloLens and Google Glass allowed for
efficient and realistic interaction between humans and
autonomous systems. Among them Microsoft
HoloLens 2 is one of the state-of-the-art
commercially available device used in many
applications (Xue, et al., 2020).
For health-care specific to older adults, AR
related works focus on the Physical, Social and
196
Anjum, T., Lawrence, S. and Shabani, A.
Augmented Reality and Affective Computing on the Edge Makes Social Robots Better Companions for Older Adults.
DOI: 10.5220/0010717500003061
In Proceedings of the 2nd International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS 2021), pages 196-204
ISBN: 978-989-758-537-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Psychological well-being. Physical well-being
include training for their lack of ability, encouraging
physical activity, providing reminders for health
related activities (e.g., medicine or food intake) (Lee,
Kim, & Hwang, 2019). For social well-being, AR
offers remote participation, virtual interaction and
emotional relationship for older adults who face
decline in mobility, lacks transportation or has
financial constraints (Lee, Kim, & Hwang, 2019). For
physiological well-being, interactive games improve
their moods and augmented immersive worlds offer
an escape to forget their chronic pain, anxiety and
social isolation (Lee, Kim, & Hwang, 2019).
AR has been used with a social robot for medical
dose control (Lera F.J., 2014). It also has been used
to engage the patients with dementia in a relaxing
nature experience (Feng, Barakova, Yu, Hu, &
Rauterberg, 2020). Other works include AR-based
coaching, exercise games, e-learning for older adults
(Lee, Kim, & Hwang, 2019). However, among the
extensive research in this area, little work includes
AR with social robots for older adult care.
Our application of SCRs is targeted towards care
home facilities. One of our goals is to reduce the
pressure on overworked staff and caregivers in care
home facilities, allowing them to better focus on their
most important person-to-person duties. We aim to
design a system where the caregivers can instantly
communicate to the older adult, provide assistance
through actuation, analyze their clinical data, and
perform remote intervention when necessary. To
achieve this, we propose the use of Augmented
Reality smart glasses (e.g., Microsoft HoloLens 2).
Integrating SCRs with AR smart glasses will
allow for an easy-to-use central platform for
monitoring, actuation, communication, assistance,
and system troubleshooting. Typical monitoring
systems in hospitals and care-home facilities rely on
feeds from CCTV cameras that are monitored by
technicians. When technicians notice events such as a
fall, the caregivers are alerted. With this approach, the
delay in receiving the alert can result in serious
injuries. Other approaches rely on sensors to detect
movements or changes in vitals and alert caregivers
through mobile applications. After receiving the alert,
the caregiver must locate the older adult to provide
the support.
For our application of deploying a group of SCRs
in care-home facilities, the number of caregiver could
be as low as one person who monitors all SCRs and
older adults through a central platform over AR
interface. With our approach, the duties of the
middleman (technician) will be replaced by the
automation and the caregiver will have direct access
for intervention. When comparing a web-based or
mobile application to our AR-based system,
accessing the platform through smart glasses allows
for a more convenient, portable, and immersive
experience where the caregiver can remain engaged
in their daily duties. Furthermore, using a mobile
device instead of smart glasses can be challenging as
using mobile devices in workplaces are controversial.
With the increasing use of AR technologies, soon
having smart-glasses instead of mobile phones may
become the norm. Particularly in healthcare, the use
of AR is becoming increasingly popular. The next-
generation smart glasses are estimated to be reduced
in size to be comparable to standard eyeglasses that
will allow such integration with ease.
Although a platform for supervision, health
monitoring and communication is essential for older
adult care, that is just one component of our vision of
SCRs integrated with smart devices. What
differentiates SCR with other assistive technologies
is the interaction component. The robot needs to
interact with the human counterpart in a natural
human-like manner. More specifically, it needs to
recognize and respond to human emotion.
Applications of Affective Computing can allow
social SCRs to achieve this ability. Affective
Computing allows systems and devices to recognize
and respond to human affect (e.g., emotion, touch).
The main contributions of this paper are as follows:
1) Integration of SCRs (i.e., Miro-e) with AR
Smart Glasses (i.e., HoloLens 2) for
supervision and support in care home
facilities. This integration enables
interoperation while utilizing the benefits of
both systems.
2) Hardware integration of Miro-e’s Raspberry
Pi 3 (B+) to Nvidia’s Jetson Nano for off-
loading Deep Learning-based Facial
Emotion Recognition on the edge. Our
choice of integration using wired ethernet
minimizes the network latency and
privacy/cybersecurity concerns.
The rest of the paper is organized as follows.
Section 2 explains our proposed framework of using
SCR and AR and their integration, Section 3 presents
a computation off-loading method for performing
Deep Learning inferences on the edge. To test and
demonstrate our method we deploy FER model into
our robot Miro-e. Section 4 explains the integration
of HoloLens 2 with Miro-e for a central supervision,
communication and actuation platform for older adult
care. Section 5 presents the conclusion and future
work.
Augmented Reality and Affective Computing on the Edge Makes Social Robots Better Companions for Older Adults
197

2 PROPOSED FRAMEWORK
Our proposed system is to deploy SCRs in different
elder’s room for individual monitoring and
personalized interactions through speech and vision.
One could consider SCR robot as a limited version of
a private all-time available nurse. To address the
privacy concerns, as a standalone system, each SCR
could analyse the sensitive data such video/speech
recording and only communicate processed and
aggregated data to the central interface on an AR
which is accessed by the caregiver. To address the
cloud/internet cybersecurity concerns, a private local
area network could be setup in the facility to connect
the SCRs to the central interface. As it can be seen in
Figure 1, the caregiver with AR system can monitor
the analysed status of the elders and provide
necessary support through the SCR without needing
to be present in the elder’s room. This enables the
caregiver who wears the AR system to effectively
and efficiently interact with multiple people through
their dedicated SCR robot from one (remote) location.
The central interface shows different smart rooms of
the older adults with SCRs integrated with other
smart devices in the rooms. Through different
interactive screens, the interface can provide different
analysed information such as overall emotional states
of the older adults in each room over a period of time.
In case the caregiver notices unusual behaviour they
can take appropriate actions. For example, the
caregiver notices that the older adult in room 3 was
sad 80% of the time within a period. They can initiate
a video/voice call with the older adult to hear their
concerns, help improve their mood, check their vitals
to ensure they are healthy and even dispatch for extra
support and alert friends and family.
Figure 1: Our proposed AR-based system integrated with
Social Companion Robot for older adult care.
For our application, emotion recognition through
speech and vision can make the experience more
interactive and engaging while providing feedback on
the user’s mental health and well-being. With the
exponential increase of data, deep learning techniques
are being more widely used due to their superiority in
performance compared with the conventional
machine learning techniques, especially when large
amounts of data is available. However, performing
deep learning training and inferences in embedded
systems such as SCR robot is challenging due to the
computational cost of deep learning algorithms. In
such cases, researchers utilize the cloud to perform
the computation. But cloud based approaches incur
large latency, energy and financial overheads and also
privacy/cybersecurity concerns (Mittal, 2019). In-
order to mitigate these challenges, edge computing is
used in the literature, that means computation is
performed where the data is produced (or close to it).
To meet the computational needs of deep learning
algorithms on the edge, multiple companies launched
low-power hardware accelerators (Mittal, 2019).
Among them, NVDIA’s Jetson is one of the most
widely used for Deep Learning inference. Jetson
features CPU-GPU heterogenous architecture where
the CPU can boot the OS and the CUDA-capable
GPU perform complex machine-learning tasks
(Mittal, 2019). To minimize the network latency and
privacy/cybersecurity concerns, in-order to perform
Deep Learning inferences on the edge, we propose to
off-load the computation to Nvidia’s Jetson through a
hardware integration via ethernet cable. To test our
system we deployed our Facial Emotion Recognition
(FER) model where the computation was performed
by Jetson using data from Miro-e’s cameras.
3 REAL-TIME FER ON THE
EDGE
Facial Emotion Recognition (FER) has been a topic
of interest in the computer vision community for
many applications. Specifically for Affective
computing, FER is an integral part of affect
recognition. Standard ML algorithms such as SVMs
and their variations have been extensively used for
FER classification. Over the recent years, Deep
Learning techniques with Convolutional Neural
Networks (CNNs) have proven to outperform
standard ML algorithms for image and video
classification in FER (Lawrence, Anjum, & Shabani,
2021). However, Deep Learning training and
inferences are computationally expensive and
typically performed using powerful and expensive
computers or servers. Most mobile robots such as
Miro-e have limited on-board resources such as
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
198

processor, memory and battery. To apply Deep
Learning algorithms on such robots', researchers
typically off-load heavy computations to cloud hosts.
The data is collected from the mobile robot and sent
to the cloud for applying Deep Learning algorithms.
But this makes the data vulnerable to cybersecurity
concerns and privacy invasion due to data
transmission through computer networks (Chunlei, et
al., 2020). Additionally, network failure or network
package loss can disrupt cloud-based deep learning.
(Chunlei, et al., 2020). In order to apply Deep
Learning algorithms on mobile robots we require
hardware that are energy efficient, small in size and
affordable (Mittal, 2019). Furthermore, for our
application we require edge computing for its low
latency and data privacy since sensitive data is
processed on-board and not on the cloud (Mittal,
2019).
To satisfy the need for Deep Learning inference
on the edge, serval products have been launched by
commercial vendors based on hardware accelerators.
Apart from Graphics Processing Units (GPUs),
system-on-chip architectures that utilize the power of
Application-Specific Integrated Circuits (ASICs),
Field-programmable Gate Arrays (FPGAs) and
Vision Processing Units (VPUs) can also be used for
inference at the edge (Amanatiadis & Faniadis, 2020).
Some of the most widely used commercially available
devices include (Amanatiadis & Faniadis, 2020):
• The Edge TPU by Google, is an ASIC
exclusively for inference achieving 4 Tera
Operations Per Second (TOPS) for 8-bit
integer inference. However, it requires the
models to be trained using TensorFlow
which is a limitation. Google’s Coral Dev
Board featuring Edge TPU is priced at $169
(USD) for the 4GB RAM version.
• The Intel Neural Compute Stick 2 is a
System-on-Chip built on the Myriad X VPU,
optimized for computer vision with
dedicated neural compute engine for
hardware acceleration of deep neural
network inferences. It has max performance
of 4 TOPS, similar to the Edge TPU.
However, it requires a host PC since the
device is distributed as a USB 3.0 stick. It
also requires the model to be converted to a
Intermediate Representation (IR) format that
can slow down the development process.
This device is priced at $68.95 (USD)
excluding the cost of a host PC.
• NVIDIA’s Jetson series is a group of
embedded machine learning platforms that
aims to be computationally powerful while
being energy efficient. They feature CUDA-
capable GPUs for efficient machine learning
inferences. Their cheapest and lightest
model is the Jetson Nano TX1 with a peak
performance of 512 single precision (SP)
Giga floating-point operations per second
(GFLOPS). They cost $129 (USD) for the
4GB version.
Figure 2: Hardware integration of Miro-e and Nvidia’s
Jetson Nano via ethernet port.
Unlike the EDGE TPU and Neural Compute Stick 2,
Jetson Nano does not require a host PC, models do
not require any conversion, is not restricted to any
specific machine learning framework and is the
cheapest option. However, Jetson Nano has a lower
computational power compared to the other two
devices, but the difference will not be significant for
our applications of vision and speech inferences.
Considering all the components, Jetson Nano was the
best fit for our system. Figure 2 shows our hardware
integration of Miro-e and Nvidia’s Jetson Nano for
efficient Deep Learning inference at the edge. In the
image, Jetson Nano board is attached to a robot body.
For our final prototype we will have the Jetson Nano
board on Miro-e’s body.
Table 1 shows the difference in power between
Jetson Nano TX1 and Raspberry Pi 3(B+) (Miro-e’s
on-board computer). The Jetson Nano TX1
significantly outperforms Miro-e’s on-board
computer in every aspect. Having such a powerful
computer integrated with Miro-e opens doors for a
large number of applications.
Augmented Reality and Affective Computing on the Edge Makes Social Robots Better Companions for Older Adults
199

Table 1: Jetson Nano and Miro-e’s on-board computer
specification comparison.
Jetson Nano TX1 Raspberry Pi 3(B+)
GPU
256-core Maxwell @
998MHz
VideoCore IV
CPU
ARM Cortex-A57
Quad-Core @
1.73GHz
ARM Cortex-A53
Quad-Core @
1.4GHz
Memory
4GB 64-
b
it LPDDR4
@ 1600MHz,
25.6 GB/s
1GB LPDDR2 @
900MHz, 8.5 GB/s
Peak
Performance
512 SP Gflops 6 DP Gflops
3.1 CNN Architecture for FER
In our recent studies, we introduced a data
augmentation technique for FER using face aging
augmentation. Publicly available FER datasets were
age-biased. To increase the age diversity of existing
FER datasets we used GAN based face aging
augmentation technique to include representation of
our target age group (older adults). We conducted
comprehensive experiments for both intra-dataset
(Lawrence, Anjum, & Shabani 2021) and cross-
dataset (Anjum, Lawrence, & Shabani 2021) that
suggest face aging augmentation significantly
improves FER accuracy.
For the FER implementation, we utilize two Deep
Learning architectures, CNNs in particular have
shown great promise for image classification. For the
purpose of FER, several studies showed that CNNs
outperform other state-of-the-art methods. For our
experiments, we used two CNN architectures;
MobileNet, a lightweight CNN developed by Google
and a simple CNN which we will refer to as Deep
CNN (DCNN). (Howard, et al., 2017). Our DCNN
classifier includes six convolutional 2D layers, three
max-pooling 2D layers, and two fully connected (FC)
layers. The Exponential Linear Unit (ELU) activation
function is used for all the layers. The output layer
(FC) has nodes equal to the number of classes (in this
case, six classes) with a Softmax activation function.
To avoid overfitting, Batch Normalization (BN) was
used after every convolutional 2D layer and dropouts
were used after every max pooling layer. Both BN
and dropout were used after the first FC layer.
Additionally, we used a lightweight CNN
architecture known as MobileNet. A lightweight
model is required for our application of FER in
embedded systems at the edge such as SCRS.
MobileNet has 14 convolutional layers, 13 depth wise
convolutional layers, one average pooling layer, a FC
layer and a output layer with the Softmax activation
function. BN and Rectified Linear Unit (ReLU) are
applied after each convolution. MobileNet is faster
than many popular CNN architectures such as
AlexNet, GoogleNet, VGG16, and SqueezeNet while
having similar or higher accuracy. The main
difference between DCNN and MobileNet is that the
latter classifier leverages transfer learning by using
pre-trained weights from ImageNet. Throughout
every experiment MobileNet contained 15 frozen
layers from ImageNet. An output layer was added
with nodes equal to the number of classes and
softmax is used as the activation function. We used
both DCNN and MobileNet classifiers with
implementations from (Sharma, 2020). The Nadam
optimizer was used along with two callbacks, ‘early
stopping’ to avoid overfitting. For reducing the
learning rate when learning stops improving, we used
‘ReduceLRonPlateau’. The data is normalized prior
to being fed into the neural networks as neural
networks are sensitive to un-normalized data. Both
the models we deployed onto Miro-e (MobileNet and
DCNN) were trained with both original and face age
augmented images.
3.2 Miro-e and Jetson Nano
Integration: Off-Loading Deep
Learning Inference to an Edge
Computing Device
In order to established a connection between Miro-e
and Jetson Nano we utilized the Robot Operating
System (ROS). The connection could be established
either through Wi-Fi or hardwired via an ethernet
cable. As privacy is our top most priority we decided
to go with hardware integration to keep Miro-e
disconnected from the internet.
For the integration to be successful to we had to
setup the environment such that Jetson and Miro-e
were compatible. Miro-e requires ROS Noetic which
is the latest version of ROS that is only compatible
with Ubuntu 20.04 Focal Fossa. However, Jetson
does not support Ubuntu 20.04 so we had to use a
Docker image on Ubuntu 18.04 with ROS noetic built
from source. Then we had to install TensorFlow,
OpenCV and other Python and ROS libraries. We
also installed Miro Development Kit (MDK) on to the
Jetson Nano and established a connection through
ethernet port. The communication was done through
ROS libraries. We were successfully able to perform
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
200
real-time FER with both MobileNet and DCNN
models without any lag or disturbances.
Miro-e is equipped with various sensors including
one camera in each eye. Each sensor is recognized as
a topic in the ROS interface. In ROS, topics are
named buses over which nodes can exchange
messages. The left eye camera and right eye camera
topics allowed us to view Miro’s real-time video feed
and utilize each frame to detect and track faces. Once
the face is detected, is it then cropped, re-sized to
48x48, converted to grayscale and passed onto our
trained FER model for emotion prediction. This entire
process is done using one script. Figure 3
demonstrates our real-time FER through Miro-e.
Figure 3: Real-time FER with Miro-e on the edge.
4 AR SMART GLASS
INTEGRATION WITH SCR
Our proposed AR-based system for monitoring group
of social robots in care home facilities requires
deploying a group of SCRs with the following
constraints:
1) Controlling robots to assist the elderly while
ensuring they performing as expected.
2) Running diagnostics on such robots in case
of hardware or software issues can be
expensive.
3) Non-intrusive monitoring and
communication with caregivers.
Having a central monitoring platform for a group
SCRs is imperative for our application. The platform
will be used to monitor the health and well-being
related data from various sensors in the environment
as well other sensing data from vision, speech, haptic
(e.g., emotion recognition). A video/voice chat option
enables the caregiver to interact with the older adult
regarding concerns about their health and well-being
(e.g., Miro-e detects the older adult is sad or angry).
The system recommends intervention when Miro-e
detects using various sensors in the environment that
the older adult has skipped medication, food or
exercise. The platform will further reduce the risk on
contamination during viral outbreaks such as
COVID-19.
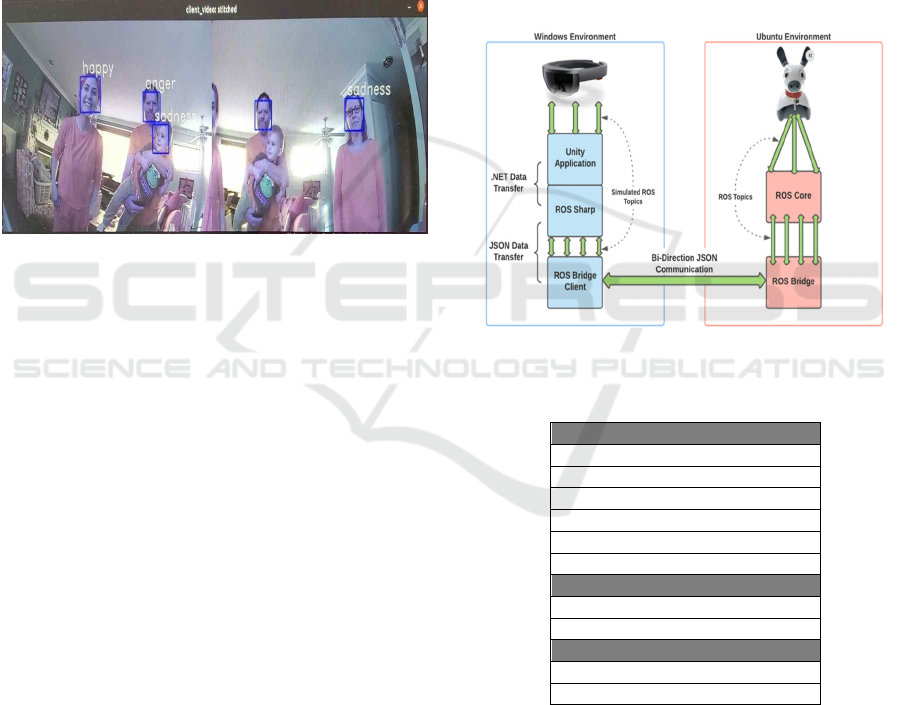
4.1 Connection between ROS and
Unity
Figure 4 outlines the proposed system architecture
where the left side represents the user interface of
Microsoft HoloLens 2 with Unity game engine. This
requires the ROS Noetic running on a Ubuntu 18.04
(Bionic Beaver).
Figure 4: HoloLens-Miro end-to-end System Architecture.
Table 2: System Development tools.
Develo
p
ment Stack
Microsoft Visual Studio 2019
Unity
ROS-Sharp
Mixed Realit
y
Toolkit
ROS-
b
rid
g
e suite
Miro Develo
p
ment Kit
Client Stack
HoloLens 2
Miro-e
Server Stack
Ubuntu 18.04 Bionic Beave
r
ROS Noetic
The development tools are presented in Table 2.
In order to establish the communication between
Miro-e and Microsoft HoloLens 2 we utilized Unity,
ROS Sharp and RosBridge-suite. ROS Sharp is a set
of open source software libraries and tools in C# for
communicating with ROS from .NET applications,
particularly Unity. RosBridge-suite is a collection of
packages including RosBridge and RosBridge
Augmented Reality and Affective Computing on the Edge Makes Social Robots Better Companions for Older Adults
201

WebSocket. RosBridge is a .NET JSON API for
communication between ROS and non-ROS
programs. RosBridge WebSocket allows messages to
be exchanged between ROS nodes.
The Ubuntu machine runs Roscore and
RosBridge. Roscore is a collection of nodes and
programs that are pre-requisites of a ROS-based
system. Roscore must be running in order for ROS
nodes to communicate. Roscore is used to send data
through topics to Miro-e, RosBridge is used to accept
data from Unity through the RosBridge WebSocket.
The data is then published on ROS topics for Miro-e
to access the data.
Unity sends simulated ROS message types to the
WebSocket provided by the RosBridge client hosted
on the Ubuntu machine. The RosBridge client then
translates these simulated messages from unity to
ROS and publishes them to ROS topics.
The first step is to establish a connection between
ROS and Unity project. To accomplish this, we
created a Unity project and copied RosSharp and
NewtonSoft (JSON framework for .NET) into the
project. We then installed and configured the Mixed
Reality Toolkit (MRTK), and configured
RosBridgeClient to be used with Unity project. This
setup establishs a connection between ROS master
node and the Unity project, allowing bi-directional
messages to be sent or received between ROS and the
Unity project.
4.2 Building an AR HoloLens App
The AR application is created using the Unity game
engine. To exchange messages with HoloLens 2, we
require an Universal Windows Platform (UWP) app
to run in HoloLens 2. For this, we first developed the
app in Unity using C# and then deployed it to
HoloLens 2. We used the Mixed Reality Tool Kit’s
(MRTK) button and menu prefabs alongside Unity’s
TextMeshPro to build a simple user interface (UI).
The user interface has buttons with the corresponding
functions written on it such as red LED, blue LED,
wag tail and so on. The predicted emotion from our
FER model is displayed on the top of the UI.
4.3 Publishing to ROS Topics
ROS topics are named buses over which nodes can
exchange messages. Each ROS topic is constrained
by the ROS message type used to publish to it and
nodes can only receive messages with a matching
type. Both Miro and the Unity project can have their
own topics and we can also build custom topics. The
Unity project is required to be subscribed to the
specific Miro topics from/to which it intends to
exchange messages and vice-versa. Miro-e has
various topics including illumination, kinematic
joints, cosmetic joints, mics, camera left, camera
right, etc. We can publish a message (executable
code) to these topics triggering the corresponding
functions to execute allowing Miro to move, wag tail,
light-up etc. To begin this process, we first initialize
Roscore with the master node as the Ubuntu machine.
Then we connect the RosBridgeClient Node and
Miro’s ROS node to the master node. Once both
nodes are linked to the master node we are ready to
exchange messages between Miro and our app in
Unity. We use a script that allows Miro to listen for
data to be published to the subscribed topics. Once
Miro’s ROS node receives a publish request it
executes the command for that specific topic. For
example, we send a request to execute a block of code
to Miro’s Illumination topic from ROS Sharp in
Unity. As ROS Sharp is subscribed to Miro’s
Illumination topic, it can exchange messages with
that topic. Miro is constantly listening for publish
requests and accepts a request that matches the type
of the topic. A similar process takes place when
executing commands to HoloLens 2, a publish
request is sent to ROS Sharp topics in Unity from
Miro’s ROS node.
Figure 5 is a picture of our prototype. Miro-e
performs FER and sends the predicted emotion to the
HoloLens AR app. The emotion is then displayed on
the user interface. Furthermore, using the user
interface, the caregiver can manipulate Miro-e to
navigate, change LED light colors, wag its tail, move
its head, ears and perform every function it is capable
of.
Figure 5: Prototype running on HoloLens 2.
5 CONCLUSION
Given the rise of global aging population it is
imperative to develop systems for age-friendly smart
environments to support our aging population for
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
202

both independent living and also in long-term care
facilities. Integrating SCRs to such smart
environments can improve the quality of life for older
adults. With the use of personalized machine
learning, SCRs can learn the preferences of the older
adults such as preferred temperature, lighting
intensity, and even activate robotic vacuum cleaners
(e.g., Roomba (Tribelhorn & Dodds, 2007) according
the their preferred time.
We proposed an AR-based system for
interactive interfacing with multiple SCRs deployed
in different rooms/homes. More specifically, we
developed a seamless communication between
Microsoft HoloLens 2 and Miro-e robot. This
integration serves as an efficient platform for
controlling the robot for assisting the older adult,
over-ride control in case the robot takes unexpected
actions, monitor their health and daily activities (i.e.,
medication or food intake, exercise), instant
communication for emergency situations and much
more.
For a more natural interactions between the robot
and elder, we developed an improved deep learning
based facial emotion recognition technique for
affective computing. To overcome the limited
computational power of the robot’s computer, we off-
loaded the Deep Learning inference to on the edge
hardware accelerators which opens doors for a wide
range of applications. To achieve this we integrated
Miro-e to Nvidia’s Jetson and successfully performed
our FER algorithms on the edge and minimize the
network latency and privacy/cybersecurity concerns
of alternative options which require cloud and
internet connectivity.
Having a central interactive platform through AR
smart glasses for managing multiple robots and being
able apply state-of-the-art learning algorithms on the
edge is a milestone towards deployment of SCRs in
smart environments to assist older adults. In fact,
combining our proposed AR-based system with
applications of Affective Computing allows for a
more reliable and safer interaction between the SCR
and the older adult.
Our future work will include integration of Miro-
e with smart home devices for advanced personalized
home automation for elder adult. The integration will
focus on the safety, security, lighting and
heating/cooling control, and also mental health of the
older adult. Another research direction is study of
human factors in the interface design and adding
more functionalities for communication, alert and
health analysis to the interface. Another next step is
the field study to assess the usability, acceptance rate,
and benefits of our systems.
ACKNOWLEDGEMENTS
The authors would like to acknowledge the
contribution of the Natural Sciences and Engineering
Research Council (NSERC) of Canada and the
Interactive Intelligent Systems and Computing
research group through which this project is
supported.
REFERENCES
Amanatiadis, E., & Faniadis, A. (2020). Deep Learning
Inference at the Edge for Mobile and Aerial Robotics.
IEEE International Symposium on Safety, Security, and
Rescue Robotics (SSRR) (pp. 334-340). IEEE.
Anjum, T., Lawrence, S.& Shabani, A. (2021). Efficient
Data Augmentation within Deep Learning Framework
to Improve Cross-Dataset Facial Emotion Recognition.
The 25th Int'l Conf on Image Processing, Computer
Vision, & Pattern Recognition. Las Vegas: Springer
Nature.
Chunlei, C., Peng, Z., Huixiang, Z., Jiangyan, D., Yugen,
Y., Huihui, Z., & Zhang, Y. (2020). Deep Learning on
Computational-Resource-Limited Platforms: A Survey.
Mobile Information Systems (pp. 1-19). Hindawi .
Forest, A., Shabani, A. (2017). A Novel Approach in
Smart Ventilation Using Wirelessly Controllable
Dampers. Canadian Conference on Electrical and
Computer Eng. Windsor, Canada: IEEE.
Feng, Y., Barakova, E., Yu, S., Hu, J., & Rauterberg, G.
(2020). Effects of the Level of Interactivity of a Social
Robot and the Response of the Augmented Reality
Display in Contextual Interactions of People with
Dementia. Sensors, (pp. 20(13), 3771).
Ghaeminia, M.H., Shabani, A.H., & Shokouhi, S.B. (2010)/
Adaptive motion model for human tracking using
Particle Filter. International Conference on Pattern
Recognition, Istanbul, Turkey.
Howard, A., Menglong, Z., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Adam, H. (2017). Mobilenets:
Efficient convolutional neural networks for mobile
vision applications. arXiv preprint arXiv:1704.04861.
Ionut, A., Tudor, C., Moldovan, D., Antal, M., Pop, C. D.,
Salomie, I., Chifu, V. R. (2020). Smart Environments
and Social Robots for Age-Friendly Integrated Care
Services. International Journal of Environmental
Research and Public Health.
Keven, T. K., Domenico, P., Federica, S., & Philip, W.
(2018). Key challenges for developing a Socially
Assistive Robotic (SAR) solution for the health sector.
23rd International Workshop on Computer Aided
Modeling and Design of Communication Links and
Networks (CAMAD). Romee, Italy: IEEE.
Lawrence, S., Anjum, T., & Shabani, A. (2021). Improved
Deep Convolutional Neural Network with Age
Augmentation for Facial Emotion Recognition in
Augmented Reality and Affective Computing on the Edge Makes Social Robots Better Companions for Older Adults
203

Social Companion Robotics. Journal of Computational
Vision and Imaging Systems (pp. 1-5). JCVIS.
Lee, L., Kim, M., & Hwang, W. (2019). Potential of
Augmented Reality and Virtual Reality Technologies to
Promote Wellbeing in Older Adults. Applied Sciences,
9(17), 3556.
Lera F.J., R. V. (2014). Augmented Reality in Robotic
Assistance for the Elderly. González Alonso I. (eds)
International Technology Robotics Applications.
Intelligent Systems, Control and Automation: Science
and Engineering. Springer, Cham.
Luppe, C., & Shabani, A. (2017). Towards Reliable
Intelligent Occupancy Detection for Smart Building
Applications. Canadian Conference on Electrical and
Computer Eng., Windsor, Canada: IEEE
Mitchinson, B., & Prescott, T. J. (2016). MIRO: A Robot
‘Mammal’ with a Biomimetic Brain- Based Control
System., (pp. 179-191).
Mittal, S. (2019). A Survey on optimized implementation
of deep learning models on the NVIDIA Jetson
platform.
Rokhsaritalemi, S. A.-N.-M. (2020). A Review on Mixed
Reality: Current Trends, Challenges and Prospects.
MDPI, 636.
Shabani, A.H., Clausi, D.A., & Zelek, J.S. (2011),
Improved spatio-temporal salient feature detection for
action recognition. British Machine Vision Conference.
Dundee, UK: BMVC.
Shabani, A.H., Clausi, D.A., & Zelek, J.S. (2012),
Evaluation of local spatio-temporal salient feature
detectors for human action recognition. Canadian Conf.
On Computer and Robot Vision, Toronto, Canada:
IEEE,
Shabani, A.H., Zelek, J.S., & Clausi, D.A. (2013), Multiple
scale-specific representations for improved action
classification. Journal of Pattern Recognition Letters.
Shabani, A.H., Ghaeminia, M.H., & Shokouhi, S.B. (2010).
Human tracking using spatialized multi-level
histogramming and mean shift. Canadian Conf. on
Computer and Robot Vision. Ottawa, Canada: IEEE.
Shabani, A.H., & Matsakis, P. (2012). Efficient
computation of objects’ spatial relations in digital
images. Canadian Conf. On Electrical and Computer
Eng. Montreal, Canada: IEEE.
Sharma, G. (2020, April ). Facial Emotion Recognition.
Retrieved from Kaggle: https://www.kaggle.com/
gauravsharma99/facial-emotion-recognition
Sheng, B., Saleha, M., & Younhyun, J. (2020). Virtual and
augmented reality in medicine. In In Biomedical
Engineering, Biomedical Information Technology
(Second Edition) (pp. 673-686).
Steverson, M. (2018). Ageing and Health. Retrieved from
https://www.who.int/news-room/fact-
sheets/detail/ageing-and-health
Tribelhorn, B., & Dodds, Z. (2007). Evaluating the
Roomba: A low-cost, ubiquitous platform for robotics
research and education. In Proceedings 2007 IEEE
International Conference on Robotics and Automation
(pp. 1393-1399). IEEE.
Varol, Z. M. (2020). Augmented Reality for Robotics: A
Review. MDPI.
Xue, C., Shamaine, E., Qiao, Y., Henry, J., McNevin, K., &
Murray, N. (2020). RoSTAR: ROS-based Telerobotic
Control via Augmented Reality. RoSTAR: ROS-based
Telerobotic Control via Augmented Reality
(pp. 1-6).
IEEE.
ROBOVIS 2021 - 2nd International Conference on Robotics, Computer Vision and Intelligent Systems
204
