
A Cooking Game for Cognitive Training of Older Adults Interacting
with a Humanoid Robot
Eleonora Zedda
1,2 a
, Marco Manca
1b
and Fabio Paternò
1c
1
CNR-ISTI, HIIS Laboratory, Via Giuseppe Moruzzi 1, Pisa, Italy
2
Department of Computer Science, University of Pisa, Largo Bruno Pontecorvo 3, Pisa, Italy
Keywords: Humanoid Robot, Cognitive Stimulation, Serious Game, Human-Robot Interaction, Older Adults.
Abstract: In this paper, we present the design and the implementation of a cooking game for older adults interacting
through a humanoid robot. We discuss the motivations and the requirements that have driven such design and
indicate how it has been implemented. The main goal is to stimulate the cognitive resources of older adults in
order to limit their decline. For this purpose, we have exploited the multimodal possibilities of the humanoid
robot and have identified two robot personalities, which are suitable to improve users' engagement, and thus
their potential participation in cognitive training programmes.
1 INTRODUCTION
By 2050, the number of individuals over the age of 85
is projected to be three times more than today (World
Health Organization, 2021). In this scenario, most
older adults will need physical, social, and cognitive
assistance. Indeed, ageing has a considerable impact
on the health of older adults in terms of cognitive and
physical impairments, which influence the abilities to
complete and perform basic activities of daily living,
such as cooking, shopping, managing the home,
bathing, dressing.
Nowadays, a large proportion of dementia care is
provided by informal caregivers, usually family
members. These caregivers often experience a
negative impact on their psychological, emotional
and physical well-being due to the high workload.
(Carros, Meurer, Loffer, & Unbehaun, 2020). Given
the high health care expenditure at older ages, and
such effects on family caregivers, new technologies
to assists older adults with cognitive impairments are
urgently needed.
Non-pharmacological interventions, such as
physical training, cognitive training, social
stimulation activities have been used to mitigate the
cognitive decline by maintaining or improving
cognitive abilities, social well-being, and the quality
a
https://orcid.org/0000-0002-6541-5667
b
https://orcid.org/0000-0003-1029-9934
c
https://orcid.org/0000-0001-8355-6909
of life of older adults (Carros, Meurer, Loffer, &
Unbehaun, 2020), (Cruz-Sandoval, Morales-Tellez,
Sandoval, & Favela, 2020), (Kim, et al., 2015).
Nevertheless, traditional interventions require
experienced instructors who may be unavailable.
Assistive technologies can provide useful support to
address this problem. They are technologies that have
the aim to assist different types of users during their
rehabilitation. They can help older adults maintain
their independence during daily routines and can also
be an important instrument during their rehabilitation
(Nishiura, Nihei, Nakamura-Thomas, & Inoue,
2021).
In recent years, humanoid robots have increased
their similarity to human behaviour starting from the
gestures and facial expressions to the ability to
understand questions and provide answers. Thanks to
such human characteristics, the interaction between
people and robots is becoming more natural.
Some authors use the term Socially Assistive
Robot to indicate a robot that assists users through
social interaction and effective interactions to provide
assistance and obtain measurable progress in
rehabilitation and learning (Feil-Seifer & Mataric,
2005).
Previous work has investigated how robots can act
as therapy assistants for children with autism (Jain,
Zedda, E., Manca, M. and Paternò, F.
A Cooking Game for Cognitive Training of Older Adults Interacting with a Humanoid Robot.
DOI: 10.5220/0010721500003060
In Proceedings of the 5th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2021), pages 271-282
ISBN: 978-989-758-538-8; ISSN: 2184-3244
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
271

Thiagarajan, Shi, Clabaugh, & Matarić, 2020), or as
a tutor or a teacher helping the scholars to create math
knowledge (Janssen, Van der Wal, Neerincx, &
Looije, 2011), nutrition, and healthy eating (Rosi, et
al., 2016), or as assistant or trainer for older adults
with cognitive impairments (Pino, Palestra, Trevino,
& De Carolis, 2020) (Manca, et al., 2021).
This work focuses on the design of a game for
older adults interacting with a humanoid robot. We
consider this kind of technology in this context
because it can potentially promote seniors’ cognitive,
physical, and emotional well-being and also reduce
the workload of the healthcare system (Vänni &
Salin, 2019).
A humanoid robot is a system that can employ
different interaction strategies, such as verbal and
non-verbal communication, the use of facial
expressions, communicative gestures, and sensors.
These capabilities are essential to creating social and
emotional interaction with the users to increase their
acceptability and users’ engagement, which may
increase the possibility to reach the goal of the
assistance in less time and with better results (Carros,
Meurer, Loffer, & Unbehaun, 2020) .
Robots to support and assist patients can be a
valuable tool to help them during their cognitive
training. In such context, digital cognitive training
through serious games (SG) may potentially benefit
those with cognitive impairments more than
traditional training due to enhanced motivation and
engagement (Manca, et al., 2021).
Serious games are digital applications specialised
for purposes different from pure entertainment, such
as education, and stimulating cognitive and physical
functions. In the literature, different studies show how
digital games can obtain positive results stimulating
older adults and helping them improve their cognitive
abilities with respect to traditional training (Tong &
Chignell, 2013).
Combining a humanoid robot and a serious game
can be an exciting solution to obtain measurable
progress in cognitive functions and stimulate the user
to continue the training programme.
The aim of this work is to present and discuss the
design of a serious game that exploits a humanoid
robot capabilities. We also indicate the requirements
considered in the design of the application for
supporting older adults in a cognitive training. A
serious game prototype has then been implemented
following the requirements, which can be used to
assess the benefits of the proposed solution. The
article is structured in four sections. Section 1
provides the motivations for this work. Section 2
discusses the state of the art in the area of robots in
cognitive training with older adults. Section 3
describes the approach proposed, mainly providing a
brief description of the serious game designed and
how it can be delivered designing two possible
personalities in the robot behaviour. Section 4 details
the design of the game proposed, the technologies
used for the implementation, the possible interaction
modes, a possible robot personalities implementation,
and reports on a preliminary evaluation with two
experts. Finally, we draw some conclusions and
provide indications for future work.
2 RELATED WORK
There have been several contributions dealing with
the use of robots for elderly care. Various goals have
been considered in such context, such as providing
social companionship, or physical or cognitive
assistance.
Typical tasks considered include assistance in
daily living activities (e.g. reminders to take
medicines), cognitive training (Manca, et al., 2021),
therapy facilitator for alleviating dementia-related
behavioural symptoms (Cruz-Sandoval, Morales-
Tellez, Sandoval, & Favela, 2020). A systematic
review shows how socially assistive robots could
potentially increase the well-being of older adults
and, at the same time, decrease the caregiver's
workload (Kachouie, Sedighadeli, Khosla, & Chu,
2014).
Concerning the benefits of cognitive training
using robots, some studies have found that training
with a robot can improve the cognitive function of
older adults. A study conducted at Osaka City
University compared a speaking humanoid Kabochan
Nodding Communication Robot with the same robot
but without the communication elements. In the 8-
week trials with 34 older adults with dementia, they
found an improvement in cognitive functions in the
communication robot version, particularly in
executive function, and verbal memory function
(Tanaka, et al., 2012). Another study, conducted by
Kim et al (Kim, et al., 2015), aims to understand the
differences between traditional cognitive training and
cognitive training with a humanoid robot. Eighty-five
older adults over 60 without cognitive impairment
were recruited for the 12-week trials. The authors
measured the cortical thickness, a change in which is
associated with cognitive decline, and the cognitive
functions before and after the intervention. The robot-
assisted cognitive training was organised using 17
cognitive training exercises, including five programs
for memory, two for language, two for calculation,
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
272

four for visuospatial function, and four for executive
function. The researchers found that participants who
received cognitive training showed less cortical
thinning than the control group. While the traditional
training obtained a better general cognitive score,
robot training produced meaningful structural brain
changes and increased executive function associated
with attenuation of the cortical thickness.
Another study (Pino, Palestra, Trevino, & De
Carolis, 2020) evaluated the effectiveness of human-
robot interaction to reinforce therapeutic behaviour
and treatment adherence. The 8-week trials involved
twenty-one older adults with Mild Cognitive
Impairments (MCI) and the humanoid robot Nao to
stimulate some specific memory areas: attention,
categorisation, and association as learning strategies.
The researchers selected five tasks for the training:
reading stories; questions about the story, associated
and not associated words, recall, and song-singer
match. In the study, the researchers found that
human-robot interaction can reinforce therapeutic
behaviour and adherence to treatment.
Serious games could be a solution to provide
cognitive training and engage the users to continue
the therapy. Various studies have evaluated different
strategies for alleviating the cognitive impairments in
older adults and evaluate how serious games may
obtain better results than traditional training.
Tapus et al. (Tapus & Vieru, 2013) evaluated if
the use of different cognitive games in a robot can
increase the cognitive attention of users. The
researchers sought to stimulate some brain functions:
sustained attention, selective attention, divided
attention; working memory, and psycho-mobility in
older adults with MCI. In the 8-month trials, nine
subjects over 70 with an MCI diagnosis interacted
with two humanoid robots (Nao and Bandit) and a
tangible interface. The cognitive training was a
music-based cognitive stimulation game. As a result,
the study indicated the overall effect of improving
user performance on the memory task in a music-
based cognitive game through the assistance of a
robotic system.
Carros et al. (Carros, Meurer, Loffer, &
Unbehaun, 2020) aimed to understand the potential of
robot-based assistance and identified enablers and
barriers to the potential implementation of the robot
systems with different serious games. In the 10-week
trials with six older adults without cognitive
impairments and four caregivers in a residential care
home, they developed cognitive and physical training
using a Pepper robot. The cognitive and physical
training was organised in three phases: motivation, in
which the users interacted with the robot using a
music quiz game; physical, in which Pepper
demonstrated some physical exercises and performed
and explained the exercises as a trainer; and finally a
cognitive phase. As a result of the study, the older
adults gave positive feedback for the interaction with
the robot. In the beginning, the residents were
reluctant to interact with the robot, at the end the
residents started to pet the robot as it were a young
child or a pet. Concerning the attitudes and
acceptability of the robot, the older adults provided
positive feedback. The researchers found that robot-
based assistance quickly became familiar with the
patients and improved their engagement and
satisfaction.
Regarding the acceptability of the robot by older
adults, Abdollahi et al. (Abdollahi, Mollahosseini,
Lane, & Mahoor, 2017) investigated if an intelligent,
emotive social robot could improve the quality of life
and acceptability of older people with dementia.
Ryan, the robot used in the experiment, was equipped
with cognitive games based on Montessori-based
activities. The cognitive training's goal was to
stimulate reminiscence and memory. The main tasks
during the training were based on activities related to
life histories of the patients, recollections of photo
albums, questions about the stories of the photos. The
trial duration was between 4-6 weeks and six older
adults had access to the robot 24/7 in the senior living
facility. As a result, the study found that the patients
were interested in having a robot as a companion and
accepted it.
In this paper, we present the design of a serious
game for a humanoid robot. Different multimodal
interactions with the humanoid robot are proposed in
order to provide a more engaging interaction and
obtain better results in terms of cognitive
improvements. The multimodal interactions are
exploited in different was in order to allow the robot
to show two different personalities. While in the
literature there has been some previous work that
used a robot with different personalities for
rehabilitation therapy (A.Tapus, C. Tapus, & Matarić,
2008), and various studies have used serious games
for cognitive training (Manera, et al., 2015), to the
best of our knowledge, this is the first time that a
humanoid robot playing serious games for cognitive
training with different personalities has been
proposed for stimulating cognitive resources, such as
memory.
A Cooking Game for Cognitive Training of Older Adults Interacting with a Humanoid Robot
273

3 THE PROPOSED APPROACH
3.1 Requirements
Taking into account previous experiences reported in
the literature, and an interview with psychologists, we
have designed a serious game that requires the users
to perform different tasks designed to stimulate
various cognitive resources.
Often programmes for patients with cognitive
impairments organise the cognitive stimulations
involving the participants through different activities,
such as using serious games, performing social
activities, and physical activity with increasingly
complex exercises, music therapy, group stories, and
stretching exercises. Such different activities are
considered because sometimes the older adults feel
bored and without motivation during the training and
no longer continue the therapy (Kim, et al., 2015).
These problems can be attenuated by stimulating the
engagement in the user during repetitive cognitive
training sessions. For this reason, we propose the use
of the various interaction modalities, also to represent
different robot’s personalities, to improve the
engagement during the cognitive training and
motivate the user to continue the training, also
considering some encouraging previous experiences
in this respect (Manca, et al., 2021).
The semi-structured interview was performed
remotely with a neuroscience researcher and two
psychologists in January 2021. The main purpose of
the interview was to gather information about the
design of the game proposed, discuss the
multimodality interaction options, and the possibility
to develop different personalities in the robot.
Designing personalities for the robot interaction
may create an enjoyable interaction; increase
engagement during the tasks, enhance user’s
attention, and improve task performance accordingly.
For this purpose, we identified two possible
personalities to be performed in the sessions:
extravert and introvert personalities that can improve
the attention and the engagement of the users. Such
personalities can be exhibited in the user interaction
by exploiting the interaction modalities differently.
The relevant types of personalities have been
identified following the Big five Factor model (John
& Srivastava, 1999). The OCEAN paradigms is often
used to classify the five big personalities traits:
• Openness: represents the degree to which
someone is imaginative, curious.
• Conscientiousness: reflects the extent that
someone is careful, deliberative and self-
aware of their actions.
• Extraversion/introversion: the extent to which
an individual is assertive, outgoing, talkative,
and sociable.
• Agreeableness: is the extent to which someone
is cooperative and friendly.
• Neuroticism: the degree to which someone is
easily angered, not well-adjusted, insecure,
and lacks self-confidence (Smith, Nolen-
Hoeksema, Fredrickson, & Loftus, 2002).
The extraversion and the introversion
personalities were chosen for our project because
previous work indicates that they are the most
observable personalities (Lippa & Dietz, 2000).
Another aspect that emerged is that modulating
the multimodal interaction according to the
increasing difficulty level can be a useful support, and
can be exploited to stimulate different cognitive
areas. The organization of the game in different levels
of difficulty is necessary to evaluate the
improvements from the cognitive domain, and also to
stimulate the user to continue the therapy.
The following requirements have thus been
identified based on the interview and the state of art
analysis:
• The game must be organised into three
difficulty levels. According to the level
selected, different parameters (e.g. number of
questions, time to answer) and ways to exploit
the interaction modalities are provided.
• The vocal interaction should be supported as it
is the most immediate modality to interact
with the robot;
• The game must support different interaction
modalities: vocal, gestures, and touch.
• The game should provide reinforcement
feedback during the sessions.
• The sessions should last at maximum 40
minutes.
• The design of the visual interface in the robot
screen should satisfy the guidelines for design
an accessible interface for older adults.
• The robot should show two personalities:
extravert and introvert, and exploit verbal and
non-verbal cues to identify two personalities
according to the literature (Tay, Jung, & Park,
2014).
• The game should stimulate multiple cognitive
domains.
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
274

• The game should reproduce daily activities
that the older adult is able to perform.
• Animations (robot’s movements) may be
exploited to define the robot’s personalities
and may also increase the user engagement.
• It would be useful to provide an additional
application where the therapists can monitor
the state performance of the users during the
interactive sessions.
3.2 Game Design
Considering previous work, including a systematic
literature review (Palumbo & Paternò, 2020), and the
interview with the psychologists, we decided to
design an application connected to some daily
activity. Thus, we chose to design a cooking game
requiring users to recognise the recipe ingredient's
chronological sequence, the typology of the
ingredients, and their weight. It aims to stimulate
working memory, semantic memory, and procedural
memory. During the game, the robot shows and
vocally synthesises the ingredients for the selected
recipe. Then, it starts the quizzes, during which the
user should use visual attention and working memory
to recognise the right ingredients and select them over
other options. Additionally, the game stimulates
working memory by which the user must remember
the correct sequence for the dish preparation. In this
game, the type of interaction allowed is vocal,
graphical and touching the robot sensors. The game is
organised into three difficulty levels. For each level,
various parameters, such as speed of the sequence of
the exercises, the number of elements, the time
available to complete the task, the volume and time
available for the task are modulated.
We decided to use recipes with well-known
ingredients. In this way, we decrease the differences
between people who are expert to cook and those who
are not, and we obtain a good baseline for stimulating
and evaluating memory improvements. The three
recipes chosen are chicken curry, beef chili, and
brownies.
Hence, the designed application starts with an
initial introduction in which the robot asks the user's
name and starts introducing the game instruction, and
the recipe description. During the recipe instruction,
the robot emphasises the sequential order, the
typology of the ingredients and their weight.
After this part, the application starts with a first
question that regards the ingredient's sequence. The
user has 30 seconds to recognise the first ingredients
among the four proposed. For each question, the user
has three possibilities to answer it.
The application is organised into three different
difficulty levels: easy, medium, hard. At each
difficulty corresponds different configurations of
some parameters: the number of ingredients in the
recipe, the reaction time, the question type (questions
about the chronological sequence, the weight of each
ingredient and the specific type of ingredients used in
the recipes, e.g. the use of dark chocolate or the red
onion upon milk chocolate and white onion) and the
total number of questions.
The following table 1 summarises the different
configurations considered for the levels in the
prototype.
Table 1: Difficulty level's parameters.
Level Easy
N° recipe ingredients 4
Reaction Time 30 seconds
Typology of Question Chronological Sequence
Weight
Total number of question 8
Level Medium
N° recipe ingredients 6
Reaction Time 20 seconds
Typology of Question Chronological Sequence
Weight
Ingredients typology
Total number of question 16
Level Hard
N° recipe ingredients 8
Reaction Time 16 seconds
Typology of Question Chronological Sequence
Weight
Ingredients typology
Total number of question 20
The questions are associated with the levels as
described in Table 2.
S represents questions regarding the
chronological sequences, W stands for the questions
regarding the weight of the ingredients, T are
questions regarding the type of the ingredients (e.g.
chocolate type: milk or dark).
Table 2: Questions Sequences.
Level Easy
S W S
Level Medium
S W T
Level Hard
S W T
A Cooking Game for Cognitive Training of Older Adults Interacting with a Humanoid Robot
275
According to the increment of the difficulty level
another type of interaction is provided: the touch on
the hand's robot. The touch interaction with the
robot’s sensors is enabled when the difficulty level is
increased because it requires more coordination and
attention. In particular, the touch interaction with the
robot hands is provided for the medium and difficult
levels, and is associated only with the question
concerning the type of ingredients. For example,
when the robot asks "Which is the type of onion, red
or yellow?". The user should touch the right robot
hand to answer yellow or the left robot hand to answer
red. In order to indicate the association between the
possible answer and the correspondent robot’s hand,
two stickers with the corresponding colours have
been applied on the robot’s wrist. Thus, at the binary
question, the screen shows two buttons with the two
different colours associated with each option.
Additionally, the game provides different
feedback, depending on whether the user answers
correctly or not. The feedback is modulated using
different cues: verbal cues, animations and gesture
and providing visual feedback. Feedback is provided
to stimulate and encourage the users to continue the
session, and help them to memorise the right answer.
Nonverbal feedback as animations are important
elements that can improve user’s engagement during
the interaction.
3.3 The Humanoid Robot
The humanoid robot used in this work is the Pepper
developed by Softbank's Robotics. Pepper is a 1.2-m-
tall wheeled humanoid robot, with 17 joints for
expressive body language, with three omnidirectional
wheels to move around.
Pepper has multimodal interfaces for interaction:
touchscreen, speech, tactile head, hands, bumper,
LEDs and 20 degrees of freedom for motion in the
whole body. The robot is equipped with a
LG CNS screen of 10.1 inches with a resolution of
1280x800 for supporting touch interaction.
Pepper is equipped with motors that allow it to
move the head, arms and back, six laser sensors and
two sonars, which allow it to estimate the distance to
obstacles in its environment.
Pepper can detect the provenance of sounds and
voices and turns its face in the direction of those who
are talking thanks to four directional microphones on
its head. The robot speaks or reproduces sounds
thanks to two speakers in the ears. The robot is
equipped with 4 microphones on the head. Regarding
the vision pepper is equipped with two identical 2D
cameras, a 3D camera located and a stereo camera in
the forehead. For connectivity is equipped with
Ethernet and Wi-Fi.
4 THE PROPOSED GAME
4.1 The Development Environment
For the development of the robot, Softbank robotics
provides a library called QiSDK and an android
studio plugin called Pepper SDK.
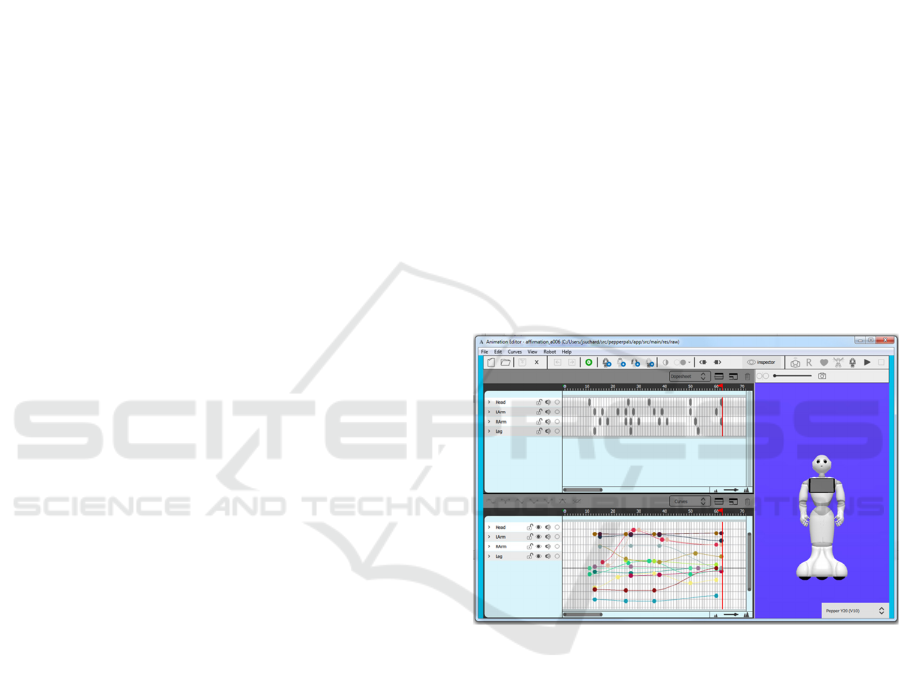
Pepper SDK, an additional plugin for Android
studio, increments the additional features provided by
Android studio. In particular, it provides a feature to
generate and modulate the gesture and the robot
joint's movement called Animation editor. The
animation editor (Figure 1) allows the user to create
and edit the animation timeline. In particular, we have
created the animations modulating different joints of
the robot: the head yaw, the head pitch, and for the
left and right arms respectively the pitch, roll, yaw
and hands.
Figure 1: Animation Editor.
Additional features provided by the plugin are related
to the robot's connection and emulation. The robot
connection allows the developer to connect to the
robot and the tablet installed on its chest. The robot
emulator allows the developer to simulate the robot in
3D and its tablet, and additionally, grants the
interaction with the robot using the Robot Viewer.
Robot Viewer is composed of a robot view interface,
motion view, dialogue view and log view. The robot
view displays the real or virtual robot in 3D. Motion
view grants the user to control the robot's monuments.
The dialogue view allows the developer to control the
dialogue outputs and enter simulated or real dialogue
input. Log view provides the log occurring during the
process.
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
276

For supporting the dialogue, a chat editor is
provided. The Chat Editor is an extension of the
Android Studio's text editor. Its main purpose is to
help the user to write chat topic files, which are files
that contain different rules, that help the robot and the
user to develop interactive vocal dialogues (Softbank
Robotics, 2021).
Figure 2 reports an example of a chat topic file
used during the introduction phase for the cooking
game.
Figure 2: Example chat topic file.
The concept name collects all the possible users
allowed to access the game. After the user says one of
the possible names in the concept, Pepper replies
saying "Nice to see you $name" and records the user's
name in the system.
A topic is an object containing rules written using
the QiChat syntax, which is a language used to write
dialog topic files. The rules associate the human input
with a relevant robot answer. In the example, in
Figure 2 a topic is defined with the chatbot name.
Then a concept is defined. A concept is a list of words
or phrases that are linked with that specific concept.
In Figure 2, the list of words allowed are the names
of the users who can have access to the game. Then
the user rule (u:) is defined, a user rule has the effect
of making the robot say or do the answer specified in
the line. In this case, if the human inputs (e.g. the user
says “Eleonora”) matches with a word containing in
the concept, the robot replies saying the answer
defined in the user rule (“Nice to see you, Eleonora”).
In the user rule, a function to execute is called, which
is an external method that is used to pass parameters
or constants to the application.
4.2 Game Interaction and
Implementation
The game is organised into three main states:
introduction, play, results.
The starting state is the introduction. At this stage,
it is possible to choose language, difficulty level,
instructions. At first, Pepper greets the user and opens
both arms over its head two times to simulate an
invitation to interact with it. Then, the user vocally
selects the preferred language between English or
Italian. In this phase Pepper simulates some
autonomous movements in order to show a social
respond. After the language selection, Pepper asks the
user's name and greets the user again. In this way, it
demonstrates its emotional nearness to the user. In
this phase of greeting, Pepper says to the user: “Hi!
My name is Pepper and I’ll help you during the
following game!”.
Simultaneously Pepper simulates a greeting with
its right arm. After that, the caregiver can vocally
select the difficulty level. Before the level selection,
Pepper provides the game instructions. In particular,
Pepper says "I’ll show you a recipe and you'll have to
answer questions about the ingredients, their weight
and type. You'll have 30, 20 or 15 seconds to answer
according to the level of difficulty chosen”, and
simultaneously it performs different gestures:
twisting its torso, slightly opening its arms and hands,
and placing its right hand on its hip and showing the
open palm to the user. This animation is performed to
simulate human behaviour and explain the
instructions also moving its arms. The animation also
aims to stimulate the user to focus on the game rules.
Then, the robot explains the steps to complete the
recipes, providing information about the ingredients,
their type and weight.
In addition, while explaining the cooking
instructions, the robot expresses more emphasis on
the elements that will be asked in the play state. To
emphasise the ingredients more, we use the Speech
Synthesis Markup Language (SSML). Its tags allow
the programmers to customise the vocal parameters,
such as voice, pitch, pauses, modify prosodic
boundary and add prominence level (W3C, 2021).
While rendering the recipe instructions, we used a
combination of different SSML tags has been used, in
particular, to emphasise the ingredients, their weight
and type (using the tag \emph=2\ and \style=joyful\).
The use of SSML provides the opportunity to
highlight and give more emphasis and receive
attention on the vocal elements pronounced by the
robot that the user should remember.
Figure 3: Introduction sub-states.
The play state is divided into two sub-states:
questions and answers. In the question state, the robot
displays and vocally renders the three types of
A Cooking Game for Cognitive Training of Older Adults Interacting with a Humanoid Robot
277

questions. The upper right hand of the screen displays
a timer showing the time remaining to answer. After
the question has been presented, the countdown starts,
and the possible answers are enabled. According to
the difficulty level, four or more possible answers are
proposed in the form of buttons showing the image of
the ingredient or its weight or type. During the
question time Pepper twists its torso and gently opens
its hands. The user has three possibilities to answer
the question.
Figure 4: Play state 4a) question about sequence 4b)
question about weight 4c) question about typology.
The answer state provides various reinforcement
feedback to the user. The user interface changes
according to the user’s answers. If the answer given
is wrong, the UI is highlighted with a red band and
displays a thumbs down icon (see Figure 5).
Additionally, reinforcing feedback is provided by the
robot in the form of vocal feedback.
Wrong answer, try again!
Figure 5: Visual and Vocal Feedback for a wrong answer
and no answer given.
If the user does not provide the right answer after
three possibilities, visual and vocal feedback is
provided such as in Figure 5 right. Moreover, non-
verbal feedback is combined with the verbal and
visual feedback. In particular, in case of wrong
answer, at the same time Pepper raises its right arm
towards its face and simulates a negation by shaking
its head to the left and right twice.
Figure 6: Animation for wrong answer.
Otherwise, if the answer given is correct, positive
reinforcement feedback is provided such as “Really
good job Eleonora! The answer is right! You are
doing a great job!” and a thumb’s up icon is showed
on the screen over a green band (see Figure 8).
Moreover, a nonverbal feedback is provided. The
robot combines different gestures: at first it raises its
arms to shoulder height, moves the forearm up and
down, and nods its head twice.
Figure 7: Animation for positive answer.
Really good job Eleonora! You are doing
a great job!
Figure 8: Visual and vocal feedback for right answer.
Additionally, the humanoid robot provides different
feedback during the session using different
modalities, such as head, arms, torso movements. If
the user provides the right answer, Pepper performs
one of the following three animations:
• Pepper raises the right arm and moves its elbow
up and down, and simultaneously it nods its head
twice (see Figure 7).
•
It raises both arms over the head twice and
expresses a sound of joy.
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
278

• It nods its head three times, and simultaneously
raises the right elbow to its shoulder twice.
Otherwise, if the user provides a wrong answer or a
timeout occurs, the robot performs one of the
following animations:
• Pepper shakes its head twice to the right and left,
and then raises its hands to its face (see Figure 6).
•
The robot raises its right arm at the shoulder and
shakes its head.
•
Pepper moves the arms up and down, and then
shakes its arms.
Finally, the result state is divided into final
feedback and data results. In the final feedback state
different visual, vocal and animation feedbacks are
provided to the user.
According to the number of correct questions,
different feedbacks are vocally synthesised. If the
user provides less than four correct answers Pepper
provides an encouragement feedback: “Good Job!
See you next time to continue to improve!”.
If the user gives between four and six correct
answers, the following feedback is provided:
“Congratulation! You answer at the majority of the
questions! At next time!”.
If the user provides more than six correct answers,
the following feedback is provided: “Excellent! You
did a great job!”.
These vocal and visual feedbacks are provided to
stimulate the user to continue the therapy and feel
gratified by the interaction with the humanoid robot.
In conclusion, a table displays a summary of the user
performance during the game session (see Figure 9).
Figure 9 shows, in particular, the number of correct
answers within the three attempts, the number of
correct answers on the first attempt, the number of
incorrect answers, number of timeouts, number of
correct answers for each question type. Such data are
helpful to understand if there is an improvement in
the memory domain.
Figure 9: Example of session game results.
4.3 How the Robot Can Show
Personalities
In addition, as introduced in the requirements section,
during the users' interaction, it can be useful that the
robot shows two different types of personality traits:
introvert and extravert personality. In this section we
describe how we plan to implement them in the game.
These personalities can be expressed by various
cues. In particular, according with the literature we
have identified different parameters to use in order to
allow the robot to show these personalities (Tay,
Jung, & Park, 2014).
Table 3 gives a brief description of the non-verbal
and verbal parameters identified for the personalities
modulation. The non-verbal parameters identified
are: the robot’s intonation with three values (neutral,
joyful, and didactic); the variation of the speech rate,
pitch, rhythm and volume; and a different set of
feedbacks. The verbal cues identified are: a
customized set of animations that can simulate
different emotions, and combine complex gestures
with different angles and speed; modulation of the
movement’s speed; association of movements with
Table 3: Personality parameters.
Extravert Introvert
Verbal
Intonation Joyful Neutral
Pitch variation pitch set at 150 [50-
200]
pitch set as
default 100
Volume rate set 90 % maximum set 70%
maximum
Speak rate 170 words per
minute
150 words per
minute
Rhythms
Variation
Variation rhythm
set 2 [0-2]
Variation rhythm
set 0
Set of feedback reinforcement
feedback
neutral feedbacks
No-verbal
Gesture both arms, head,
torso movements
with big angles,
faster res
p
onses
one arm with
small angles,
slower response
Animations animations that
convey different
emotions
neutral
animations
Moving speed 40% faster than
introvert
movements
slower
movements
Sound movement
associated with
sounds and melody
no sounds or
melody
Autonomous
movements
autonomous
movements
few autonomous
movements
A Cooking Game for Cognitive Training of Older Adults Interacting with a Humanoid Robot
279

sounds; and the possibility to perform autonomous
movements. Autonomous movements are natural
movements that give the impression that the robot is
alive (e.g. natural arms movements)
.
The robot can provide a different combination of
verbal and non-verbal cues for each interaction with
the users according to the personality performed. For
example, in the extravert condition, the robot asks the
questions with a joyful intonation and a high-pitched
voice, and modulating its gesture such as moving both
arms over its head. When the user provides the right
answer the extravert robot provides reinforcement
feedback and complex animations in association with
a sound that expresses joy and increasing the speed of
its animations. On the contrary, the introvert robot
during the interaction will be neutral. For example, in
the question state, the robot synthetizes the question
with a neutral intonation and a slow animation. When
the user provides the right answer the robot reacts
with a neutral intonation and a low speech rate,
providing a short feedback such as saying “Good”,
and after a few seconds, it undulates the torso left and
right twice. In summary, the extravert personality is
shown through a more joyful and active interaction
while the introvert with a more neutral and calm
interaction.
We introduce possible ways to exhibit the two
personalities because we want to investigate if these
different personalities traits that can be activated
depending on the users characteristics and
interactions, can create an enjoyable interaction;
engage more the user during the tasks; increase the
user’s attention, and consequentially if can improve
the user’s performance. The caregiver can select the
personality according to the user personality trait
identified before the cognitive training sessions.
4.4 Preliminary Evaluation
A preliminary evaluation with two experts on
cognitive training and serious games was carried out
in July 2021.
The evaluation was organized in two different
steps: first of all, the experts interacted with the robot
and the cooking game, and then a structured interview
was performed using scripted questions in order to
evaluate the game and the proposed requirements.
The experts interacted with the robot by
performing the easy and hard difficulty levels. The
two experts are both female with ages of 27 and 29.
The interview was organized into six questions
regarding general positive and negative feedback of
the interaction with the robot and the game;
information about the animations performed by the
robot; whether it can be useful in cognitive
stimulation and whether it can be improved, opinions
on the tasks performed in the cognitive game, and the
multimodal interaction, and finally a general remark
about the sessions.
The experts indicated as a positive aspect the
multimodal interaction that simplifies the interaction
and offers elements that can stimulate more attention
from the user. They found that the multimodal
interaction is the optimal interaction mode for the
target identified because the vocal interaction is
immediate and easy to use and the touch interaction
with the robot’s sensor requires, on the one hand,
more attention and, the other hand, engages and offers
the possibility to interact with the robot through
physical interaction. They stressed the effectiveness
of the multimodal interaction as the optimal solution
with elders compared to the touch interaction with a
tablet. The experts highlighted how the touch
interaction with the robot’s screen may cause some
issues. Another element highlighted was the
importance of emphasising the ingredients that will
be asked about later in the quizzes. Some negative
feedback concerned the weights shown during the
recipe instructions presentation on the screen, which
were considered too small and difficult to read. One
expert stressed as positive element that during most
of the game the vocal feedback provided by the robot
is shown also on screen, in this way the user has
double reinforcement feedbacks. As negative element
both experts indicated the instruction state. The
experts advised providing specific instructions for
each level after selecting it. Another element, is to
provide more vocal prompt about the instructions
during the interaction. For example, when the touch
sensor interaction is required, the robot could provide
a vocal prompt in which it explains that at that time
the touch interaction is required. The experts reported
the necessity to provide an additional vocal feedback
when the robot does not understand the answer given
by the user. Concerning the animations, they reported
some issues regarding one animation shown when the
user answers correctly. They indicated that the
animation shown in Figure 7 does not effectively
convey the message of the right answer, and could be
modified by simulating a victory animation. The
other animations were found immediate and coherent.
One expert stressed the importance of animations
because they create more engagement and provide a
feeling of gratification in the user. Regarding the
animations, one expert highlighted how they could
create more engagement and stimulate attention in the
user. The game seemed well organized with the
different interaction modes and the different levels.
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
280

One expert suggested a possible change in the type of
question regarding the weight of the cooking
technique required in the recipe because she believes
that remembering weight information is a difficult
task. The other expert reported the utility of the
multimodal interaction in the cognitive context
because it improves the engagement and the attention
of the user. Overall the game was found a helpful tool
because it stimulates multiple cognitive domains. The
animations are important elements and provide more
engagement and additional reinforcement feedback.
As far as the multimodal interaction is concerned,
both experts highlighted its usefulness and
immediacy, and reported that it is the optimal
interaction model for older adults with cognitive
impairments. One expert suggested the possibility to
physically interact with the robot not only with the
hands but also with the head of the robot.
4.5 Data Visualization for Caregivers
In addition, a Web application has been developed to
provide the caregivers the possibility to access the
user's performance data regarding the interaction with
games and the robot.
The robot is provided with a Wi-Fi connection
that allows storing the collected data into an external
server. The data collected are: user id, total right
answers, total wrong answer, right answer and wrong
answer for each question typology, the total number
of questions the number of timeouts performed during
the session and reaction time.
Such data are collected to analyse the evolution of
users while playing the game and then to evaluate if
there is an improvement in the cognitive level, in
particular on working memory, on the reaction time
and the attention.
The Web application shows a game report with
general information such as the number of users that
are involved in the training, the total numbers of
sessions completed, and a graph regarding the total
numbers of errors and success rate over time. At the
top of the UI, the caregiver can select the data
performance of a specific user. Figure 10 shows the
interface and provides the information about the
user's session. The top of the page reports general
information about the user: the total number of
sessions performed, the total hours taken, graphs
regarding the success and error rates. At the end of
the page a table collects the information about the
user’s performance: the number of correct answers
within the three attempts, the number of correct
answers on the first attempt, the numbers of incorrect
answers, number of timeouts, number of the correct
answers for each question type. The Web application
is an additional tool offered to the caregivers, which
may be useful to monitor the user's cognitive
improvement over time.
Figure 10: Web application showing data for the caregivers.
5 CONCLUSIONS AND FUTURE
WORK
This paper presents the design and implementation of
a cognitive serious game for older adults with
cognitive impairments proposed through multimodal
interaction with a humanoid robot. We describe the
current state of the application prototype, and also
how two robot personalities can be added to it.
Moreover, we report on some preliminary feedback
from two experts in cognitive training with serious
games.
As future work we intend to complete the
implementation of the support for the two
personalities, and test the application with older
adults with mild cognitive impairments. Furthermore,
we want to offer the caregivers the possibility of
customising some game features to provide a better
personalization for each user. We also plan to
investigate the impact of different robot personalities
on older adults, and how their use should consider the
user personality.
Finally, after validating the proposed game we plan
to derive a set of guidelines that can be generally useful
for serious games played through humanoid robots.
REFERENCES
A.Tapus, C. Tapus, C., & Matarić, M. .. (2008). User—
robot personality matching and assistive robot behavior
adaptation for post-stroke rehabilitation therapy.
Intelligent Service Robotics, 169-183.
Abdollahi, H., Mollahosseini, A., Lane, J., & Mahoor, M.
(2017). A pilot study on using an intelligent life-like
robot as a companion for elderly individuals with
dementia and depression. IEEE-RAS 17th International
Conference on Humanoid Robotics, (pp. 541-546).
A Cooking Game for Cognitive Training of Older Adults Interacting with a Humanoid Robot
281

Carros, F., Meurer, J., Loffer, D., & Unbehaun, D. (2020).
Exploring human-robot interaction with the elderly:
results from a ten-week case study in a care home.
Proceedings of the 2020 CHI Conference on Human
Factors in Computing Systems, (pp. 1-12).
Cruz-Sandoval, D., Morales-Tellez, A., Sandoval, E. B., &
Favela, J. (2020). A social robot as therapy facilitator in
interventions to deal with dementia-related behavioral
symptoms. Proceedings of the 2020 ACM/IEEE
International Conference on Human-Robot Interaction
(pp. 161-169). ACM/IEEE.
Feil-Seifer, D., & Mataric, M. J. (2005). Defining socially
assistive robotics. IEEE 9th International Conference
on Rehabilitation Robotics,, (pp. 465-468).
Jain, S., Thiagarajan, B., Shi, Z., Clabaugh, C., & Matarić,
M. J. (2020). Modeling engagement in long-term, in-
home socially assistive robot interventions for children
with autism spectrum disorders. Science Robotics,
5(39).
Janssen, J. B., Van der Wal, C. C., Neerincx, M. A., &
Looije, R. (2011). Motivating children to learn
arithmetic with an adaptive robot game. International
conference on social robotics (pp. 153-162). Springer.
John, O. P., & Srivastava, S. (1999). The Big Five Trait
taxonomy: History, measurement, andtheoretical
perspectives. Handbook of personality:Theory and
research, 2nd ed.
Kachouie, R., Sedighadeli, S., Khosla, R., & Chu, M. T.
(2014). Socially assistive robots in elderly care: a
mixed-method systematic literature review.
International Journal of Human-Computer Interaction,
30(5), 369-393.
Kim, G., Jeon, S., Kiho, I., Kwon, H., Lee, B., & Kim Y,
G. (2015). Structural brain changes after traditional and
robot-assisted multi-domain cognitive training in
community-dwelling healthy elderly. PloS one, 10(4).
Lippa, R. A., & Dietz, J. K. (2000). The relation of gender,
personality, and intelligence tojudges’ accuracy in
judging strangers’ personality from brief video
segments. Journal of Nonverbal Behavior, 24, 25–43.
Manca, M., Paternò, F., Santoro, C., Zedda, E., Braschi, C.,
R., F., & Sale, A. (2021). The impact of serious games
with humanoid robots on mild cognitive impairment
older adults. International Journal of Human-
Computer Studies, 145, 102509.
Manera, V., Petit D.P., Derreumaux, A., Orvieto, I.,
Romagnoli, A., Lyttle, G., Robert, (2015). Kitchen and
cooking, a serious game for mild cognitive impairment
and Alzheimer’s disease: a pilot study. Frontiers in
aging neuroscience.
Nishiura, Y., Nihei, M., Nakamura-Thomas, H., & Inoue,
T. (2021). Effectiveness of using assistive technology
for time orientation and memory, in older adults with or
without dementia. Disability and Rehabilitation:
Assistive Technology 16(5), 472-478.
Palumbo, V., & Paternò, F. (2020). Serious games to
cognitively stimulate older adults: a systematic
literature review. PETRA (pp. 27:1-27:10). ACM Press.
Pino, O., Palestra, G., Trevino, R., & De Carolis, D. (2020).
The humanoid robot nao as trainer in a memory
program for elderly people with mild cognitive
impairment. International Journal of Social Robotics,
12(1), 21-33.
Rosi, A., Dall’Asta, M., Brighenti, F., Del Rio, D., Volta,
E., Baroni, I., & Scazzina, F. (2016). The use of new
technologies for nutritional education in primary
schools: a pilot study. Public health, 50-55.
Smith, E., Nolen-Hoeksema, S., Fredrickson, B., & Loftus,
G. (2002). Atkinson and Hilgard’s Introduction to
Psychology. . Wadsworth .
Softbank Robotics. (2021, 07 10). Pepper SDK-Tools.
Retrieved from QiSDK: https://qisdk.softbank
robotics.com/sdk/doc/pepper-sdk/ch3_tools/tools.html
Tanaka, M., Ishii, A., Yamano, E., Ogikubo, H., Okazaki,
M., & Kamimura, K. (2012). Effect of a human-type
communication robot on cognitive function in elderly
women living alone. Medical science monitor:
international medical journal of experimental and
clinical research, 18(9).
Tapus, A., & Vieru, A. M. (2013). Robot cognitive
stimulation for the elderly. International Work-
Conference on the Interplay Between Natural and
Artificial Computation (pp. pp. 94-102). Springer.
Tay, B., Jung, Y., & Park, T. (2014). When stereotypes
meet robots: the double-edge sword of robot gender and
personality in human–robot interaction. . Computers in
Human Behavior, 38, 75-84.
Tong, T., & Chignell, M. (2013). Designing game-based
cognitive assessments for elderly adults. Proceedings of
the First International Conference on Gameful design,
research, and applications, (pp. 127-130).
Vänni, K., & Salin, S. (2019). Attitudes of Professionals
Toward the Need for Assistive and Social Robots in the
Healthcare Sector. Korn O. (eds) Social Robots:
Technological, Societal and Ethical Aspects of Human-
Robot Interaction. Human–Computer Interaction
Series. Springer, Cham.
W3C. (2021, 07 20). Speech Synthesis Markup Language
(SSML). Retrieved from https://www.w3.org/TR/
speech-synthesis/
World Health Organization. (2021, 07 12). Ageing and
health. Retrieved from World Health Organization:
https://www.who.int/news-room/fact-
sheets/detail/ageing-and-health
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
282
