
Teleoperating Humanoids Robots using Standard VR Headsets:
A Systematic Review
Lucio Davide Spano
a
Department of Mathematics and Computer Science, University of Cagliari, Via Ospedale 72, 09124, Cagliari, Italy
Keywords:
Teleoperation, Virtual Reality, Humanoid Robots, Systematic Review, Meta Analysis.
Abstract:
The recent development of both Virtual Reality (VR) and the availability of multipurpose Humanoid Robots
and their development platforms fostered the combination of such technologies for supporting teleoperation
tasks. Many technical solutions are documented in the literature and studies discussing the benefits and lim-
itations of different solutions. In this paper, we survey a total of 23 papers written between 2017 and 2021
that employ a consumer VR headset for teleoperating a humanoid robot, applying the Preferred Reporting
Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines. We identify the characteristics of
the hardware setup, the software communication architecture, the mapping technique between the operator’s
input and the robot movements, the provided feedback (e.g., visual, haptic, etc.), and we report on the iden-
tified strengths and weaknesses on the usability level (if any). Finally, we discuss possible further research
directions in this field.
1 INTRODUCTION
In the last years, we witnessed the convergence of two
important trends. The first is the wide availability of
Virtual Reality (VR) head-mounted displays (HMD)
at a low price, pushing the development of many in-
terfaces based on such devices, both at the consumer
and the research level. The second is the develop-
ment of commercial versions of humanoid robots that
fostered their application in different scenarios. In
addition, modular development frameworks like the
Robot Operating System (ROS) (Whitney et al., 2018)
ease the communication between software compo-
nents and the robot hardware.
In such a scenario, there have been many at-
tempts to close the circle between the virtual and the
real world, supporting the teleoperation of humanoid
robots through a Virtual Reality interface. If imple-
mented effectively, such an interaction can support
physical interactions in remote places that keep a high
sense of presence for the user. Use cases include re-
mote learning and teaching (Botev and Lera, 2020),
remote manufacturing (Lipton et al., 2018) or other
tasks where a remote embodied presence is conve-
nient. Such a fascinating topic fostered a high amount
of research, especially in the last five years, after the
hardware and software platforms we mentioned be-
a
https://orcid.org/0000-0001-7106-0463
came available at reasonable prices. Such a rapid evo-
lution requires a step back for understanding the les-
son we learnt from the different attempts and possible
improvements and open research questions.
In this paper, we survey a total of 23 papers writ-
ten between 2017 and 2021 that employ a consumer
VR headset for teleoperating a humanoid robot, ap-
plying the Preferred Reporting Items for Systematic
Reviews and Meta-Analyses (PRISMA) guidelines.
We categorise the proposed solution describing the
employed hardware and software solutions, highlight-
ing the identified strong and weak points for each of
them. In addition, we analyse the validation sections
of the surveyed papers for identifying open questions
related to the teleoperator experience.
2 METHOD
This review aims at analysing the last five years of de-
velopment in the VR interfaces for teleoperating hu-
manoid robots. Through the literature analysis, we
want to highlight the current practices and identify
the possible improvements to their development and
evaluation methodologies. We applied the PRISMA
(Preferred Reporting Items for Systematic Reviews
and Meta-Analyses) (Moher et al., 2009) guidelines
for identifying the papers of interest for our review,
308
Spano, L.
Teleoperating Humanoids Robots using Standard VR Headsets: A Systematic Review.
DOI: 10.5220/0010723200003060
In Proceedings of the 5th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2021), pages 308-316
ISBN: 978-989-758-538-8; ISSN: 2184-3244
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
applying the four phases for getting the final set.
We included in the review the papers that meet the
following criteria:
1. Published between 2017 and 2021. We explored
the literature published in the last five years.
2. Support the Teleoperation Task. The proposed
interface must support the control of a robot by an
operator when they are not in the same location.
3. Consumer VR Headset. The proposed interface
must use a consumer VR headset for implement-
ing the immersive interface (e.g., an Oculus Rift,
HTC Vive, etc.).
4. Control of a Humanoid Robot. The controlled
robot must resemble entirely or partially the a hu-
man body.
5. Full Paper. The paper must contain the descrip-
tion of a mature work (e.g., should not contain an
idea or a work in progress implementation).
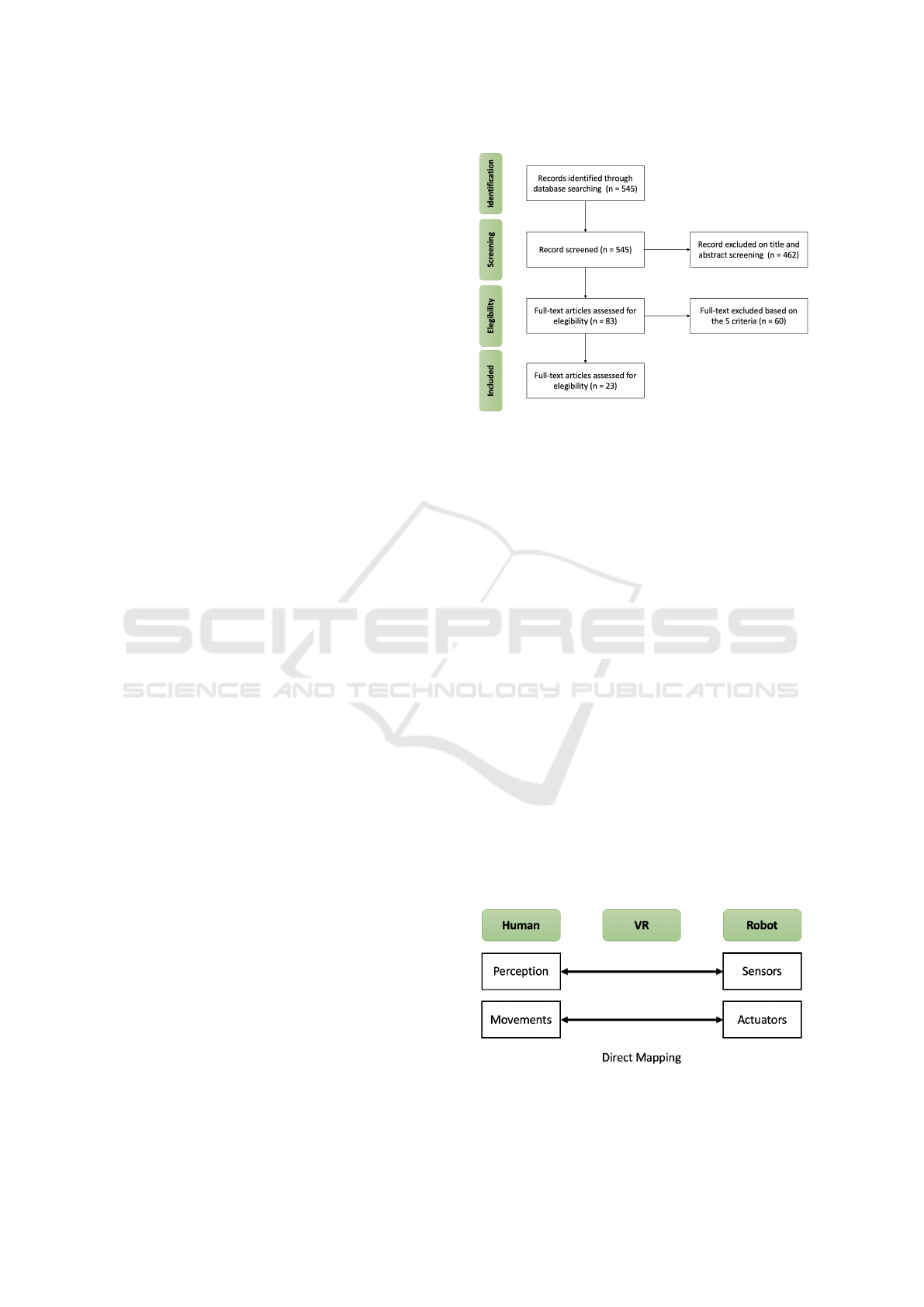
Figure 1 summarises the four phases that led to
the selection of the 23 papers. The initial set of pa-
pers was build using the following digital libraries and
search engines:
• ACM digital library
• IEEE Xplore
• Springer Link
• Google Scholar
In order to replicate the database query, we looked
for all the items in the library published between
2017 and 2021, including the words teleoperation,
humanoid, robot, Virtual Reality (or VR) in the pa-
per text. After collecting the starting set, we removed
from the list the papers that seemed not relevant ac-
cording to their title and/or abstract. Finally, we ex-
amined the full text of 83 papers, and we excluded
those not meeting the described criteria.
In the next sections, we will discuss the identi-
fied techniques, describing the hardware configura-
tion, the supported tasks and the validation of the pro-
posed approaches. Table 1 summarises the different
aspects identified in the surveyed papers.
3 TELEOPERATION
TECHNIQUES
According to (Lipton et al., 2018) we can distinguish
the teleoperation systems into three categories. The
first and most simple is employs a direct mapping (see
Figure 2): there is no intermediate space between the
user and the robot. In such a case, the sight of the
Figure 1: The four phases of the literature search performed
using the PRISMA guidelines.
human is bound to the robot vision, and a high re-
fresh rate (minimum 60Hz) is required for prevent-
ing motion sickness. For controlling the robot move-
ments (or the movement of its parts) in direct map-
ping scenarios, we can employ a piloting controller
(e.g., through a joypad, joystick, keyboard and mouse
etc.) while wearing the headset. This usually breaks
the sense of presence but requires less effort in map-
ping the input towards the robot actuators. Other so-
lutions employ motion capturing devices such as the
Kinect, Leap Motion etc., which capture the user’s
body movement. In this case, the problem is how to
map the user’s movements towards the robot, since
simple mappings require a good correspondence be-
tween the structure of the two bodies, for avoiding
fatigue in the user or impossible movements.
In the cyber-physical approach the user controls a
virtual twin of the robot in a Virtual Reality environ-
ment (see Figure 3. There is a mapping between the
relevant part of the real world in the remote setting,
including the virtual counterpart of the robot. On the
one hand, they usually have the advantage of support-
ing simulations for training the operator. On the other
hand, they require tracking a high amount of data for
Figure 2: The representation of a direct mapping teleopera-
tion techniques. The user’s perception and movements are
directly mapped to the robot’s sensors and actuators.
Teleoperating Humanoids Robots using Standard VR Headsets: A Systematic Review
309

Table 1: Summary of the surveyed papers.
Paper Robot HMD Controllers Movements Framework Technique
(Martinez-
Hernandez
et al., 2017)
iCub, Pioneer
LX mobile
Oculus Rift
DK2
Custom gloves
(Force)
Head Orientation, YARP Direct
(Kilby and
Whitehead,
2017)
InMoov Oculus Rift
DK2
IMU sensors Arm control, grasp Custom Direct
(Chen et al.,
2017)
Baxter Oculus Rift
DK2
Kinect2, Geo-
magic Touch
Head Orientation,
grasp
Custom Direct
(Mizuchi
and In-
amura,
2017)
ROS-based
robots
Oculus
Rift, HTC
Vive,
FOVE
Kinect2, Leap
Motion, Per-
ception Neuron
Head Orientation,
robot control
ROS Cyber-
physical
(Lipton
et al., 2018)
Baxter Oculus Rift VR Controllers VR controllers ROS Homunculus
(Zhang
et al., 2018)
PR2 HTC Vive VR Controllers VR Controllers Custom Cyber-
physical
(Bian et al.,
2018)
Baxter Oculus Rift Kinect Head Orientation,
arm control, grasp
Custom Direct
(Whitney
et al., 2018)
and (Whit-
ney et al.,
2020)
ROS-based
robots
Unity-
compatible
HMD
VR Con-
trollers, Kinect
Head Orientation,
arm control, grasp
ROS Direct
(Spada
et al., 2019)
NAO Oculus Rift Cyberith Virtu-
alizer
Head Orientation,
Navigation
Custom Direct
(Xi et al.,
2019)
UR2 HTC Vive VR Controllers Arm control, grasp Custom Direct
(Elobaid
et al., 2019)
iCub Oculus Rift VR Con-
trollers,
Cyberith
Virtualizer
Head Orienta-
tion, arm control,
navigation
YARP Direct
(Cardenas
et al., 2019)
Telebot-2 HTC Vive Wearable, VR
Controller
Head Orientation,
arm control, grasp
Custom Direct
(Gaurav
et al., 2019)
Baxter HTC VIve VR Controllers Head Orientation,
grasp
ROS Direct
(Hirschmanner
et al., 2019)
Pepper Oculus Rift Leap Motion Head Orientation,
arm control, grasp
Custom Direct
(Lentini
et al., 2019)
ALTER-EGO Oculus Rift Myo armband,
IMU, Wii Bal-
ance Board
Head Orientation,
arm control, grasp
Direct
(Girard
et al., 2020)
InMoov Oculus Rift
DK2
IMU sensors Head Orientation,
robot control
Custom Direct
(Orlosky
et al., 2020)
iCub Oculus Rift
DK2
N/A Head Orientation, Custom Cyber-
physical
(Botev and
Lera, 2020)
Qtrobot Oculus Rift N/A Head Orientation,
robot control
ROS Direct
(Omarali
et al., 2020)
Panda Oculus Rift VR Controllers arm control, grasp Custom Cyber-
physical
(Nakanishi
et al., 2020)
Toyota Hu-
man’s Support
Oculus Rift VR Controllers Head Orientation,
arm control, grasp,
navigation
ROS Direct
(Zhou et al.,
2020)
Baxter HTC Vive VR Controllers Head Orientation,
arm control, grasp,
navigation
ROS Cyber-
physical
(Wonsick
and Padır,
2021)
NASA Valkyrie HTC Vive VR Controllers Head Orientation,
arm control, grasp,
navigation
ROS Cyber-
physical
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
310
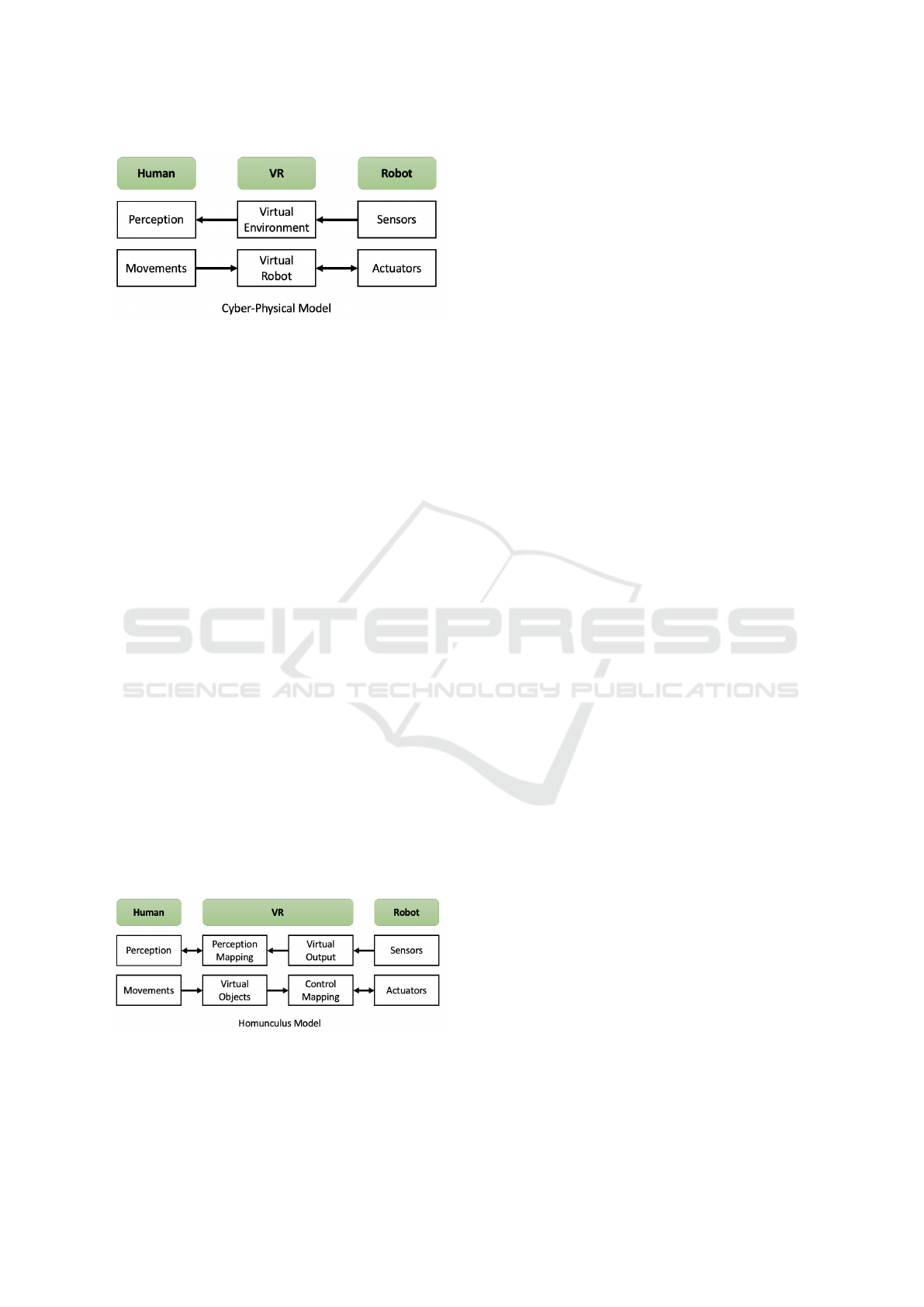
Figure 3: The representation of a cyber-physical teleopera-
tion techniques. The robot sensors influence the represen-
tation of a virtual environment, which is perceived by the
user, who controls a virtual representation of the robot for
interacting with it.
supporting the simulation mapping the relevant part
of the remote setting.
The homunculus model (see Figure 4) exploits the
concept of a control room, where multiple displays
and objects are spread in the virtual world. The user
interacts with such control elements, which are in turn
mapped towards the robot. Different displays and ob-
jects may employ different mapping techniques, thus
increasing the adaptation to specific tasks. In addi-
tion, removing the need to have a virtual replica of
the remote setting requires less data for simulations.
In the next sections, we will summarise the work
in the surveyed papers grouping them by teleoper-
ation technique. Most of them belong to the di-
rect mapping (68.2%), followed by cyber-phisical ap-
proaches (27.2%) and homunculus (4.6%). We will
present them mainly in cronological order of publica-
tion, grouping only follow-up work.
3.1 Direct Mapping
The direct mapping technique supports the teleoper-
ation by rendering the video or the raw output of the
robot’s visual sensors to provide context information
and action feedback to the teleoperator. Such a tech-
nique is simple to implement, but it suffers the delays
Figure 4: The representation of the homunculus teleopera-
tion techniques. The user selects among different displays
and objects in a virtual control room, supporting differ-
ent mappings between perception and sensors and between
movements and actuators.
between the user’s actions and the sensor feedback
rendering, which may be perceivable for the users.
However, the simplified implementation and the in-
tuitiveness of the mapping makes it the default choice
in many teleoperation interfaces.
(Martinez-Hernandez et al., 2017) experimented
with the iCub and the Pioneer XL mobile for reach-
ing telepresence in a remote setting. The hardware
configuration includes an Oculus Rift DK2 playing
the camera video and audio stream on the HMD. The
HMD orientation is mapped to the robot’s head move-
ments. As for the hand control, they created a pair of
custom gloves, providing vibration according to the
pressure data coming from the iCub hands.
(Kilby and Whitehead, 2017) created a system
consisting of a 3D printed open-source humanoid
robot (InMoov), an Arduino-based mapping between
IMU sensors strapped on the user’s dominant arm and
the controlled robot’s arm. The user also wears an
Oculus Rift DK2 for visualizing the remote environ-
ment. The robot was equipped with cameras whose
stream was displayed in the HMD. No other source of
input is available.
(Chen et al., 2017) created a teleoperating system
based on a Baxter robot equipped with a Kinect V2 on
top of his head. The pan and tilt servo motors of the
Kinect are controlled through the Oculus Rift DK2
IMU sensors, mapping the natural head movements
into changes in the camera viewport. The user con-
trols the robot’s arm through a Geomagic Touch joy-
stick, which provides the tactile force of the robot’s
pinchers, the restoration feedback that puts back the
joystick in the rest position (as does the robot arm)
and the force feedback during the robot arm control.
The communication architecture exploits a wireless
network. Three computers and one Arduino imple-
ment the communication among the different compo-
nents of the architecture.
(Bian et al., 2018) detail a mapping technique for
transforming the skeleton tracking data acquired with
a Kinect V2 towards the arm movements of a Baxter
robot. The interface exploits a direct mapping on both
the user’s sight and movements: the stream of another
Kinect V2 sensor is rendered on an Oculus Rift HMD.
(Whitney et al., 2018) introduced the ROS Real-
ity, an interface supporting the teleoperation in VR
through the Internet of any robot compatible with the
Robot Operating System (ROS). A Unity-compatible
VR headset is required for running the interface. Fol-
lowing the ROS modular architecture, ROS Reality
is a collection of components supporting the creation
of a VR teleoperation interface built on top of ROS
components communicating whit the Unity environ-
ment. It basically supports a direct mapping between
Teleoperating Humanoids Robots using Standard VR Headsets: A Systematic Review
311

the user’s movements and the remote robot, even if
a virtual model of the robot is included in the Unity
scene for immediate feedback.
(Spada et al., 2019) propose a different configu-
ration for controlling the robot locomotion. Instead
of joypad/joystick or keyboard controls for changing
the robot’s position in the environment, they map the
user’s movement on a passive omnidirectional tread-
mill, the Cyberith Virtualizer. Such a configuration
increases the direct mapping level in the teleoperation
task. They employ an Oculus Rift HMD, and the pro-
posed architecture supports both the teleoperation of
a physical robot or the simulation in a virtual environ-
ment.
The work in (Xi et al., 2019) focuses on learning
manipulation tasks from several human demonstra-
tions. Using Hidden Markov Models, the mapping
technique is able to “correct” the user’s movements
for improving the manipulation success. The testing
environment exploits an HTC Vive and its controller
for getting the user’s input, a Kinect V2 for imple-
menting the robot’s view and two Universal Robot3
six-DoF arms.
(Elobaid et al., 2019) elaborated more on the idea
of mapping the robot navigation task through a walk-
in-place technique. Similarly to (Spada et al., 2019),
they employed a Cyberith Virtualizer, but they also in-
cluded the support to the VR controllers for mapping
the arm movements. Overall, such a setup completes
the direct mapping effort, but the hardware configura-
tion suffers from a tradeoff between safety and usabil-
ity. For avoiding possible user’s falls, the treadmill
exploits a ring and some belts around the user’s waist,
but this makes it difficult for them to move their arms,
and often users hit the ring with the remotes.
(Cardenas et al., 2019) propose an IMU-equipped
wearable garment for controlling the movements of
the robot’s arms and torso. After a calibration step,
they use the sensors’ output to reconstruct the kine-
matic of the user’s movements and reproduce them
through the connected robot, called Telebot-2 and
specifically designed for working with such a wear-
able device. Other tasks such as controlling the view,
grasping and the navigation are performed through
the standard VR headset controllers and sensors (HTC
Vive).
Similarly, (Girard et al., 2020) worked on a con-
trol system based on wearable suits, this time em-
ploying low-cost components. The controlled robot
is 3D printed, based on the InMoov (Langevin, 2014)
project. The stream of two high-resolution cameras
and binaural microphones positioned on the robot
head is sent to an Oculus Rift DK2. The movements
are collected through a suit of IMU sensors processed
using the Perception Neuron framework.
(Gaurav et al., 2019) propose a Deep Learning-
based technique for mapping the human poses and the
robot joint angles in a direct mapping. The techni-
cal setup includes a Kinect for sensing the environ-
ment around the robot, a VR-based visualization of
the depth-sensing point cloud and the usage of the
HTC-Vive controllers for supporting a Baxter Robot
grasping task.
(Hirschmanner et al., 2019) designed a free-hand
control interface for the robot teleoperation. Instead
of employing standard VR controllers, they exploited
a mount for installing a Leap Motion device in front
of an Oculus Rift headset. Through such a device, the
interface tracks the skeleton joints of the user’s hands,
which are used to reconstruct the user’s shoulder and
elbow poses and map them to the robot’s joints. They
employed a Softbank Pepper in their experiments, but
the system may be used on other robots of the same
producers.
(Lentini et al., 2019) introduced ALTER-EGO, a
mobile two-wheel and self-balancing robot equipped
with variable stiffness actuators. The robot compo-
nents include sensor and computational power, en-
abling it to work autonomously. The robot supports a
teleoperation mode through a pilot station composed
of wearable devices, a Wii Balance Board and an
Oculus Rift HMD. The headset controls the robot’s
head orientation, while two Myo armbands for each
arm and an additional IMU device per hand control
the robot’s arm movements and grasp. Finally, the
Wii Balance board allows controlling the robot’s ve-
locity by leaning.
(Botev and Lera, 2020) propose the application of
a direct mapping telepresence interface in the edu-
cational field. The proposed support leverages ROS
Bridge and allows connecting Unity to ROS for con-
trolling the robot. In the paper, the operator used
an Oculus Rift and its controllers for teleoperating a
QTrobot.
(Nakanishi et al., 2020) created a VR teleopera-
tion interface for the Toyota Human Support Robot,
based on the Oculus Rift and its controllers, and ex-
ploiting the ROS framework for communicating with
the robot. The standard robot’s hardware was aug-
mented with a Ovrvision Pro 360
o
camera streaming
the output to the HMD. The work describes the map-
ping between the human and the robot movements
and reports on an extensive test against a set of se-
lected tasks in a home environment and on the stan-
dard setting of the WRS robot competition.
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
312

3.2 Cyber-physical Approaches
The Cyber-Physical Approaches create a teleopera-
tion interface starting from the robot RGB and/or
depth camera and perform a scene reconstruction
and/or understanding step before rendering it in VR.
The scene is updated reading such streams, but not
completely replaced. This allows reducing the de-
lays between the user’s actions and the visualization
of their effects.
(Mizuchi and Inamura, 2017) introduce a frame-
work for managing different types of robots and HMD
through the same underlying support. The solution
leverages on Unity 3D and the ROS framework, al-
lowing to teleoperate real robots and simulate the in-
teraction in VR without the need to connect a real
physical robot. There is not much information on how
the supported control gestures, the paper reports tests
with depth-camera based tracking devices. The eval-
uation included discusses only the communication la-
tency.
(Zhang et al., 2018) proposes an interesting so-
lution for implementing a cyber-physical system for
teleoperating a robot. Instead of directly mapping the
robot camera on the HMD (an HTC Vive), they ex-
ploit a depth camera to create a coloured point-cloud
view of the surrounding environment and render it in
VR to avoid sickness problems. The user controls
the robot’s arms through the Vive controllers, map-
ping their position and orientation towards the robot.
The trigger button controls the robot’s gripper. The
authors exploit such a setting for training a deep net-
work that learns how to manipulate objects from the
teleoperation data.
(Orlosky et al., 2020) focused on a method for
decreasing the discomfort caused by the delay in the
transmission of the robot camera stream while wear-
ing an HMD. They propose to use a pre-computed
panoramic reconstruction of the environment, decou-
pling the user’s and the robot’s view spaces. They
tested the configuration using an Oculus Rift DK2 and
an iCub robot in teleoperation tasks to assess the ef-
fects of latency on head movement and accuracy. The
panoramic reconstruction improved the comfort dur-
ing teleoperation that performance only improved for
tasks requiring slow head movements.
(Omarali et al., 2020) introduce a modification
in the overall hardware setting for the teleoperation,
placing a depth camera for the reconstruction of the
remote environment on the arm effector rather than on
the robot’s head. The authors designed three differ-
ent grasp techniques (direct, pose-to-pose and point-
and-click) to be combined with gestures based on Tilt-
Brush for controlling the camera viewpoint and scene
navigation. The hardware setup included two Kinect
V2 cameras for reconstructing the scene, the Oculus
Rift with its touch controllers for the scene visualiza-
tion and manipulation and a Franka Emika’s Panda
robot.
(Zhou et al., 2020) proposed TOARS, an advanced
teleoperating system designed for controlling a Bax-
ter robot. The system exploits Unity and the ROS
framework for building different components, em-
ploying deep learning techniques to overcome the de-
lay between the camera capture and the HMD render-
ing (HTC Vive). The system can reconstruct the en-
vironment from the point cloud provided by a Kinect,
simplifying the geometry and speeding up the render-
ing in VR. In addition, it also contains a scene un-
derstanding algorithm that can replace the point-cloud
representation of know objects with 3D prefabs. Such
a feature is reasonable in controlled settings (e.g., as-
sembly tasks) where most of the objects in the scene
are known in advance. No evaluation of the teleoper-
ation experience was reported.
(Wonsick and Padır, 2021) propose a VR teleop-
eration system for the NASA Valkyrie robot, a 32 de-
gree of freedom (DOF) humanoid robot designed to
compete in the DRC Trials in December 2013. The
VR interface uses an HTC Vive HMD and its con-
trollers, and a waist tracker. The scene rendering is
powered by Unity and the robot is controlled through
the ROS framework. Differently from other work in
this field, the proposed interface splits the interaction
into a planning and an executing step. The planning
is achieved through different menus and gesture track-
ing using the Vive controllers. The interface visually
shows the plan’s results (e.g. the steps in a naviga-
tion task) using a ghosting technique (replicas of the
relevant robot parts are displayed in the environment).
3.3 Homunculus
The only sample of a Homunculus (Lipton et al.,
2018) The authors instantiate the homunculus tech-
nique exploiting a Baxter robot, an Oculus Rift and
the associated Touch Controllers. The VR environ-
ment is based on Unity, while the communication re-
lies on the ROS platform. Through this setting, they
compare the direct mapping with an implementation
of the homunculus technique on assembly manipula-
tion tasks, but the result cannot show differences in
the user’s performance.
Teleoperating Humanoids Robots using Standard VR Headsets: A Systematic Review
313

4 EVALUATING A
TELEOPERATION INTERFACE
In different papers we registered a simple qualita-
tive assessment of the interface, which does not pro-
vide many information for further development of the
teleoperating techniques. For instance, in (Martinez-
Hernandez et al., 2017) the authors reports only a
qualitative comments on the interface without any for-
mal evaluation. Bian et al. (Bian et al., 2018) show
only that an operator was able to conclude a grabbing
and pushing task trough the proposed interface.
The most commonly investigated aspect in the
teleoperation interface evaluation is the effectiveness,
i.e., the ability of a human operator to conclude a ma-
nipulation or a navigation task correctly. While this
is surely the key aspect in this subject since it demon-
strates the feasibility of the approach, little attention
is devoted to the operator’s experience. Completing
a task successfully is only the beginning of a good
experience. For a real-world adoption of such a tech-
nique, the interface should require a reasonable ef-
fort (e.g., comparable with the effort required in a co-
located setting) and provide a good level of satisfac-
tion for the human user.
For instance, in (Kilby and Whitehead, 2017)
the evaluation was performed on a gross and a fine-
grained motor task. The gross motor tasks was drop-
ping a cube of 15cm off a platform. The fine grained
motor task was grasping a mug from the handle with-
out dropping it. People liked the direct mapping of
the arm movements to the robot and the first person
view through the HMD. In (Chen et al., 2017), the
evaluation includes a grabbing task of Lego blocks
and stacking them together. They tested whether in-
cluding or excluding the VR and haptic feedback af-
fected the user’s rating and effectiveness and found
a preference for the system, including such compo-
nents. Whitney et al. (Whitney et al., 2020) describe
a sample setting for teleoperating a Baxter robot in
24 manipulation tasks, showing good performance of
human teleoperators, but also some limitations in the
task success related to a low perception of the force
exerted by the robot in grabbing or pushing objects.
Another common aspect included in the evalua-
tion of a teleoperation system is the level of accuracy
obtained in the movement mapping. In particular,
such an assessment is reported when the authors pro-
vide a custom kinematic mapping technique between
the teleoperator and the robot movements. Examples
of this approach are available in (Spada et al., 2019)
and (Nakanishi et al., 2020). In the latter work, there
is an attempt to provide reusable guidelines: they reg-
ister a low difference between the planned and the
executed movements and also a high success rate in
the different tasks. In addition, they remark that tasks
requiring precise alignment of the orientation of the
gripper with force interaction are challenging. Un-
fortunately, there is no evaluation of the teleoperator
experience.
We also registered a few evaluations that include
data on the teleoperator experience with the proposed
interface. They are not common in interfaces em-
ploying a direct mapping, which usually focus on ac-
curacy. An exception is the work by (Hirschman-
ner et al., 2019). The authors evaluated the usabil-
ity of the proposed approach on two tasks: grabbing
and pouring. They compared their teleoperation ap-
proach against the kinesthetic guidance, during which
the robot’s joints are moved by hand into the posi-
tion desired. The results show that the users preferred
the teleoperation mode. They completed the opera-
tion faster, putting less effort into the task requiring
the control of two arms.
Instead, the evaluation of cyber-physical ap-
proaches usually includes some comparison with
other techniques (e.g., a direct mapping). This may
be explained considering that the increased complex-
ity in the interface development should be justified
with some advantages on the user’s side. For in-
stance, Omarali et al. (Omarali et al., 2020) show that
the in-hand camera and the proposed visualization
technique based on point-cloud reconstruction (which
tries to overcome occlusion problems) improves the
user’s scene understanding if compared against a stan-
dard point-cloud visualization. In addition, they show
that users prefer gestures over physical movements
for scene navigation. Wonsik and Padir (Wonsick and
Padır, 2021) compare their VR teleoperation interface
of the NASA Valkyrie robot to the currently avail-
able 2D counterpart, highlighting a lower workload,
a higher awareness of the remote environment, but a
more complex hardware setup.
The most complete user-centric evaluation we
found in our review is the one available in a follow-
up work by Whitney et al. (Whitney et al., 2020). The
group compared four interface types for teleoperat-
ing a robot using the ROS Reality framework: i) Di-
rect Manipulation (basically the kinesthetic guidance,
where the user moves the robot’s arm and wrist for
completing the task), ii) Keyboard and Monitor, iii)
Positional Hand Tracking with Monitor and iv) Po-
sitional Hand Tracking with Camera Control, which
is basically the same configuration discussed in the
previous work (Whitney et al., 2018). The evaluation
procedure required the participant to teleoperate the
robot for stacking three cups, starting with the direct
manipulation first for familiarising with the robot mo-
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
314

tion. Then, they proceeded with the following condi-
tions in randomised order. The results are encourag-
ing for the VR version: it was faster than the other
virtual conditions (but slower than the direct manip-
ulation). It registered a lower workload and higher
perceived usability.
In our view, the latter approach should be the stan-
dard for further evaluation work in this field. It in-
cludes information on both the accuracy and the ef-
fectiveness of the evaluated tasks. Still, it also collects
standard usability metrics such as the cognitive load
through a NASA TLX (Hart, Sandra G. and Stave-
land, Lowell E., 1988), the overall usability through
the SUS questionnaire (Brooke et al., 1996) and other
user-experience self-reported metrics through Likert
scales. Including such data in the evaluation allows
the researchers and the practitioners to better identify
possible pitfalls in the teleoperation control, advan-
tages and disadvantages of the input techniques and
so on.
Further, defining standard manipulation and nav-
igation tasks to be completed through teleoperation
interfaces would be helpful for the replicability of the
research and for a systematic comparison of the re-
sults. A good starting point may be the settings and
the tasks defined for challenges, such as WRS (WRS,
). Still, such a standard should emerge from the re-
search community and take into account usability-
related aspects.
In summary, while many techniques are available
for teleoperating robots in VR, we still need research
to evaluate them and create a reliable set of guidelines
for adopting such practice in production settings.
5 CONCLUSIONS
In this paper, we surveyed 23 papers written between
2017 and 2021 employing a consumer VR headset
for teleoperating a humanoid robot. We categorised
the contribution according to the available teleoper-
ation techniques, finding two main competitors: di-
rect mapping and cyber-physical models. The former
is easier to implement and understand but suffers the
delays between the user’s actions and the feedback
in the remote location. Cyber-Physical interfaces ap-
ply different approaches for mitigating or overcoming
such delays, but use virtual replicas of the environ-
ment and/or the controlled robot, thus requiring more
for both the user and the developers.
We registered a wide variety of solutions for con-
trolling robot movements, especially for the arms,
hands, and navigation tasks. We are far away from
standard solutions in this regard. Only the head ori-
entation mapped on the HMD internal sensor seems
widely accepted.
Finally, there is a lack of consideration of the tele-
operation experience in validating the reviewed ap-
proaches. There are some remarkable exceptions, but
further work is required for moving from the mere as-
sessment of the task completion to a synergistic eval-
uation of both the robot and the teleoperator perfor-
mance (and satisfaction). Identifying standard tasks
and environments for comparing the different inter-
faces would foster the adoption of such a perspective.
REFERENCES
World Robot Summit. Partner Robot Challenge.
https://worldrobotsummit.org/en/wrs2020/challenge/
service/partner.html. Accessed: 2021-08-02.
Bian, F., Li, R., Zhao, L., Liu, Y., and Liang, P. (2018). In-
terface Design of a Human-Robot Interaction System
for Dual-Manipulators Teleoperation Based on Vir-
tual Reality*. In 2018 IEEE International Conference
on Information and Automation (ICIA), pages 1361–
1366.
Botev, J. and Lera, F. J. R. (2020). Immersive Telep-
resence Framework for Remote Educational Scenar-
ios. In Learning and Collaboration Technologies.
Human and Technology Ecosystems, pages 373–390.
Springer, Cham.
Brooke, J. et al. (1996). Sus-a quick and dirty usability
scale. Usability evaluation in industry, 189(194):4–7.
Cardenas, I. S., Kim, J.-H., Benitez, M., Vitullo, K. A.,
Park, M., Chen, C., and Ohrn-McDaniel, L. (2019).
Telesuit: design and implementation of an immersive
user-centric telepresence control suit. In Proceed-
ings of the 23rd International Symposium on Wearable
Computers, ISWC ’19, pages 261–266, New York,
NY, USA. Association for Computing Machinery.
Chen, J., Glover, M., Yang, C., Li, C., Li, Z., and Cangelosi,
A. (2017). Development of an Immersive Interface for
Robot Teleoperation. In Towards Autonomous Robotic
Systems, pages 1–15. Springer, Cham.
Elobaid, M., Hu, Y., Romualdi, G., Dafarra, S., Babic, J.,
and Pucci, D. (2019). Telexistence and Teleoperation
for Walking Humanoid Robots. In Intelligent Systems
and Applications, pages 1106–1121. Springer, Cham.
Gaurav, S., Al-Qurashi, Z., Barapatre, A., Maratos, G.,
Sarma, T., and Ziebart, B. D. (2019). Deep Corre-
spondence Learning for Effective Robotic Teleopera-
tion using Virtual Reality. In 2019 IEEE-RAS 19th
International Conference on Humanoid Robots (Hu-
manoids), pages 477–483. ISSN: 2164-0580.
Girard, C., Calderon, D., Lemus, A., Ferman, V., and Fa-
jardo, J. (2020). A Motion Mapping System for Hu-
manoids that Provides Immersive Telepresence Ex-
periences. In 2020 6th International Conference on
Mechatronics and Robotics Engineering (ICMRE),
pages 165–170.
Teleoperating Humanoids Robots using Standard VR Headsets: A Systematic Review
315

Hart, Sandra G. and Staveland, Lowell E. (1988). Devel-
opment of NASA-TLX (Task Load Index): Results of
Empirical and Theoretical Research. In Human Men-
tal Workload, volume 52 of Advances in Psychology,
pages 139 – 183.
Hirschmanner, M., Tsiourti, C., Patten, T., and Vincze,
M. (2019). Virtual Reality Teleoperation of a Hu-
manoid Robot Using Markerless Human Upper Body
Pose Imitation. In 2019 IEEE-RAS 19th International
Conference on Humanoid Robots (Humanoids), pages
259–265. ISSN: 2164-0580.
Kilby, C. and Whitehead, A. (2017). A Study of Viewpoint
and Feedback in Wearable Systems for Controlling a
Robot Arm. In Advances in Human Factors in Wear-
able Technologies and Game Design, pages 136–148.
Springer, Cham.
Langevin, G. (2014). Inmoov-open source 3d printed
life-size robot. pp. URL: http://inmoov. fr, Li-
cense: http://creativecommons. org/licenses/by–
nc/3.0/legalcode.
Lentini, G., Settimi, A., Caporale, D., Garabini, M., Gri-
oli, G., Pallottino, L., Catalano, M. G., and Bic-
chi, A. (2019). Alter-Ego: A Mobile Robot With a
Functionally Anthropomorphic Upper Body Designed
for Physical Interaction. IEEE Robotics Automation
Magazine, 26(4):94–107. Conference Name: IEEE
Robotics Automation Magazine.
Lipton, J. I., Fay, A. J., and Rus, D. (2018). Baxter’s
Homunculus: Virtual Reality Spaces for Teleopera-
tion in Manufacturing. IEEE Robotics and Automa-
tion Letters, 3(1):179–186. Conference Name: IEEE
Robotics and Automation Letters.
Martinez-Hernandez, U., Boorman, L. W., and Prescott,
T. J. (2017). Multisensory Wearable Interface for Im-
mersion and Telepresence in Robotics. IEEE Sensors
Journal, 17(8):2534–2541. Conference Name: IEEE
Sensors Journal.
Mizuchi, Y. and Inamura, T. (2017). Cloud-based mul-
timodal human-robot interaction simulator utilizing
ROS and unity frameworks. In 2017 IEEE/SICE In-
ternational Symposium on System Integration (SII),
pages 948–955. ISSN: 2474-2325.
Moher, D., Liberati, A., Tetzlaff, J., Altman, D. G., and
Group, P. (2009). Preferred reporting items for sys-
tematic reviews and meta-analyses: the prisma state-
ment. PLoS medicine, 6(7):e1000097.
Nakanishi, J., Itadera, S., Aoyama, T., and Hasegawa,
Y. (2020). Towards the development of an intu-
itive teleoperation system for human support robot us-
ing a VR device. Advanced Robotics, 34(19):1239–
1253. Publisher: Taylor & Francis eprint:
https://doi.org/10.1080/01691864.2020.1813623.
Omarali, B., Denoun, B., Althoefer, K., Jamone, L., Valle,
M., and Farkhatdinov, I. (2020). Virtual Reality based
Telerobotics Framework with Depth Cameras. In 2020
29th IEEE International Conference on Robot and
Human Interactive Communication (RO-MAN), pages
1217–1222. ISSN: 1944-9437.
Orlosky, J., Theofilis, K., Kiyokawa, K., and Nagai, Y.
(2020). Effects of Throughput Delay on Perception
of Robot Teleoperation and Head Control Precision in
Remote Monitoring Tasks. PRESENCE: Virtual and
Augmented Reality, 27(2):226–241.
Spada, A., Cognetti, M., and Luca, A. D. (2019). Loco-
motion and Telepresence in Virtual and Real Worlds.
Human Friendly Robotics, pages 85–98. Publisher:
Springer, Cham.
Whitney, D., Rosen, E., Phillips, E., Konidaris, G., and
Tellex, S. (2020). Comparing Robot Grasping Teleop-
eration Across Desktop and Virtual Reality with ROS
Reality. Robotics Research, pages 335–350. Pub-
lisher: Springer, Cham.
Whitney, D., Rosen, E., Ullman, D., Phillips, E., and Tellex,
S. (2018). ROS Reality: A Virtual Reality Framework
Using Consumer-Grade Hardware for ROS-Enabled
Robots. In 2018 IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS), pages 1–9.
ISSN: 2153-0866.
Wonsick, M. and Padır, T. (2021). Human-Humanoid
Robot Interaction through Virtual Reality Interfaces.
In 2021 IEEE Aerospace Conference (50100), pages
1–7. ISSN: 1095-323X.
Xi, B., Wang, S., Ye, X., Cai, Y., Lu, T., and Wang,
R. (2019). A robotic shared control teleoperation
method based on learning from demonstrations. In-
ternational Journal of Advanced Robotic Systems,
16(4):1729881419857428. Publisher: SAGE Publi-
cations.
Zhang, T., McCarthy, Z., Jow, O., Lee, D., Chen, X., Gold-
berg, K., and Abbeel, P. (2018). Deep Imitation Learn-
ing for Complex Manipulation Tasks from Virtual Re-
ality Teleoperation. In 2018 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
5628–5635. ISSN: 2577-087X.
Zhou, T., Zhu, Q., and Du, J. (2020). Intuitive robot tele-
operation for civil engineering operations with virtual
reality and deep learning scene reconstruction. Ad-
vanced Engineering Informatics, 46:101170.
Humanoid 2021 - Special Session on Interaction with Humanoid Robots
316
