
Automatic Recognition of Human Activities
Combining Model-based AI and Machine Learning
Constantin Patsch, Marsil Zakour and Rahul Chaudhari
Human Activity Understanding Group, Chair of Media Technology (LMT), Technical University Munich (TUM),
Arcisstr. 21, Munich, Germany
Keywords:
Activity and Plan Recognition, Knowledge Representation and Reasoning, Machine Learning.
Abstract:
Developing intelligent assistants for activities of daily living (ADL) is an important topic in eldercare due to
the aging society in industrialized countries. Recognizing activities and understanding the human’s intended
goal are the major challenges associated with such a system. We propose a hybrid model for composite activity
recognition in a household environment by combining Machine Learning and knowledge-based models. The
Machine Learning part, based on structural Recurrent Neural Networks (S-RNN), performs low-level activity
recognition based on video data. The knowledge-based part, based on our extended Activation Spreading
Network architecture, models and recognizes the contextual meaning of an activity within a plan structure.
This model is able to recognize activities, underlying goals and sub-goals, and is able to predict subsequent
activities. Evaluating our action S-RNN on data from the 3D activity simulator HOIsim yields a macro average
F1 score of 0.97 and an accuracy of 0.99. The hybrid model is evaluated with activation value graphs.
1 INTRODUCTION
With the increasing median age in industrialized
countries, the relative portion of elderly people within
the population is steadily increasing. For neurode-
generative diseases like Alzheimer’s, assistive sys-
tems might help affected elderly people to accomplish
tasks by providing guidance according to assessed in-
tentions. Activity understanding systems for smart
home environments based on sensory and visual data
have proven to be capable of recognizing and predict-
ing activities (Du et al., 2019) and also useful in health
monitoring applications (Yordanova et al., 2019).
In order to recognize and understand human activ-
ities, we have to understand the contextual importance
or relevance of an activity within the human’s activity
sequence towards a certain goal. Contextual impor-
tance indicates the significance of an activity within
the plan structure as well as the logical interdepen-
dencies between activities. In this context, reason-
ing about the logic soundness of a recognized activity,
given previous activity recognitions and the informa-
tion of a plan structure, is essential. We assume that
the humans are not explicitly conveying their intent to
the system, and that the goal is not known beforehand.
The contribution of this paper is a hybrid activity
recognition model consisting of our action Structural-
RNN (S-RNN) architecture inspired by Jain et al.
(2016) and a new Activation Spreading Network for-
mulation based on the work of Saffar et al. (2015). We
present an interoperation mechanism for the S-RNN
and the ASN architectures. Our hybrid recognition
model for composite activities, depicted in Figure 1,
pursues the following objectives:
• contextual activity recognition based on logical
interdependencies in the plan structure,
• predictions of feasible future activities,
• consideration of partial observability and missing
activity recognitions,
• recognition of intended goals and subgoals, and
• consideration of interleaved activities contribut-
ing to multiple goals.
2 RELATED WORK
2.1 Model-based Artificial Intelligence
On the one hand, approaches based on an explicit
plan library compare activity sequence recognitions
to existing plans (Goldman et al., 2013; Levine and
Williams, 2014; Saffar et al., 2015). On the other
Patsch, C., Zakour, M. and Chaudhari, R.
Automatic Recognition of Human Activities Combining Model-based AI and Machine Learning.
DOI: 10.5220/0010747000003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 15-22
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
15
method_1: drink tea from cup
make tea
move cup
to self
grab cup
place tea
bag in cup
pour
kettle to
cup
method_1: make tea
drink tea from cup
High level plan
recognition
Activity recognition:
Comparision of feasible
object-action
combinations
object: [kettle, cup]
action: grab
object: [tea bag]
...
Machine Learning
based on
visual/sensory
observations
action: pour
object: kettle
t-1t-2t-3
object: cup
tt-4
action: grab
t-5t-6
object: tea bag
object: microwave
grab
kettle
grab tea
bag
...
action: pour
method_2: make tea
...
method_2: drink tea from cup
...
Figure 1: Hybrid model, showing exemplary recognitions
and methods, within a tea drinking plan.
hand, generative approaches try to exploit ontologi-
cal and probabilistic knowledge to synthesize feasible
activity sequences given observations (Ramırez and
Geffner, 2011; Yordanova et al., 2019; Chen and Nu-
gent, 2019).
Goldman et al. (2013) propose a model for plan
recognition based on an explicit plan library, that de-
composes goals into activities by exploiting their hi-
erarchical structure. They incorporate partial ordering
by defining subtasks in terms of logical and temporal
preconditions. Their model probabilistically assesses
the most likely goal from the plan library based on the
contribution of an activity observation to a plan.
Saffar et al. (2015) introduce an Activation
Spreading Network (ASN) that captures the hierarchi-
cal dependencies between several abstractions of ac-
tivities, while grouping them according to their affil-
iation to their respective subgoals and goals. Hereby,
preconditions between subsequent activities intro-
duce logical order. Action-object recognitions from
the RGB-D video data enable activation value prop-
agation throughout the plan library in order to recog-
nize the most likely goal, and ensure a logically sound
activity recognition process. Our work partly relies
on the above concepts from Saffar et al. (2015), while
we introduce activity predictions, improved long-term
recognition robustness and compatibility with Ma-
chine Learning frameworks.
2.2 Machine Learning based Models
Machine Learning based models recognize activities
based on sensory and visual data as shown in (Kop-
pula et al., 2013; Jain et al., 2016; Du et al., 2019;
Shan et al., 2020; Bokhari and Kitani, 2016). Du
et al. (2019) use LSTMs and RFID data for activity
recognition. Bokhari and Kitani (2016) employ Q-
learning and a Markov Decision Process to capture
an activity sequence progression. Shan et al. (2020)
propose a framework for hand-object contact recogni-
tion and hand state estimation in order to understand
human object interaction and human object manipu-
lation based on video data.
In the context of human activity and object af-
fordance learning from RGB-D data, Koppula et al.
(2013) propose the CAD120 dataset based on spatio-
temporal features while introducing semantic object
affordances. Based on this dataset, Jain et al. (2016)
introduce Structural Recurrent Neural Networks (S-
RNNs) that use Deep Learning based on spatio-
temporal graphs for action and affordance recogni-
tion. These graphs capture the interactions between
the human and the surrounding objects within a tem-
poral segment of an action. Actions are classified
based on human-specific and shared human-object
features with the help of the corresponding RNNs,
whereas the object classification is based on object-
specific and shared human-object features. Our work
borrows the feature preprocessing process as well as
the general framework of the S-RNN, while we di-
rectly use object-specific features for the action recog-
nition process without considering affordances.
3 HYBRID ACTIVITY MODEL
3.1 Activation Spreading Network
In this section we explain our ASN architecture, an
extension of the one presented by Saffar et al. (2015).
We developed this ASN to meet the requirement of
performing high-level contextual activity recognition
in the hybrid activity recognition model. Compared
to the work by Saffar et al. (2015), our ASN provides:
• compatibility with discrete Machine Learning
model recognitions,
• weighting based on activity distinctiveness,
• contextual recognition of longer complex activity
sequences, independent of activity duration,
• activity predictions, and
• recovery from misclassified and missing activities
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
16

3.1.1 Extended Activation Spreading Network
Architecture
The ASN is a directed acyclic graph consisting of
nodes n ∈ N , sum edges e ∈ E
s
, max edges ma ∈ E
ma
and ordering/precondition edges o ∈ E
o
. N repre-
sents the set of all nodes and E the set of edges in
the ASN, where E
ma
⊂ E and E
o
⊂ E . N consists of
operator nodes n
o
∈ N
o
, method nodes n
m
∈ N
m
and
compound nodes n
c
∈ N
c
, where N
o
⊂ N , N
m
⊂ N
and N
c
⊂ N is valid.
The operator nodes are the leaf nodes within the
network representing activities that can be recognized
by the low-level activity recognition framework. The
method nodes take the sum over the weighted activa-
tion values of the child nodes that are connected to it
with sum edges. Hereby, each sum edge connected to
a method has its own weight. The assignment of the
activities to the respective sum edges is captured in
the SumEdges dictionary according to definition 3.2.
All methods connected to the same compound node
with max edges represent different ways of achieving
that compound node. The max edges m ∈ E
m
only en-
able the method that has the highest activation value
between competing methods to spread its activation
value. Compound nodes can either again contribute
to their parent method, or if they are on the highest
level within the ASN, they are denoted as goal nodes.
Definition 3.1 (Activation Value Dictionary).
ActValN contains the activation value of every node
n ∈ N . The activation value ac(n) ∈ [0, 1] of each
node is calculated based on the low-level activity
recognition and activation value propagation process.
The structure is defined by:
ActValN = {n
1
: ac(n
1
), n
2
: ac(n
2
), ..., n
k
: ac(n
k
)},
where k denotes the number of available operator,
method and compound nodes in the plan library and
ac(n) denotes the activation value of the node n ∈ N .
Definition 3.2 (Sum Edge Dictionary). SumEdges
contains the activities contributing to their respective
methods. Accordingly, SumEdges is formulated as:
SumEdges = {n
m
1
: [l
1
], n
m
2
: [l
2
], ..., n
m
j
: [l
j
]},
where j denotes the number of all available meth-
ods within the plan library and [l
j
] denotes an ar-
ray containing the specific activity nodes n ∈ N that
are associated with the respective method n
m
j
∈ N
m
.
Sum edges e ∈ E
s
are displayed with black arrows in
graphical plan structures.
Definition 3.3 (Max Edge Dictionary). n
m
∈ N
m
are
method nodes that lead to a certain compound node
n
c
∈ N
c
which is determined by MaxEdges as:
MaxEdges = {n
c
1
: [methodlist
1
], n
c
2
: [methodlist
2
],
..., n
c
b
: [methodlist
b
]}.
Hereby, b denotes the number of compound nodes
within the plan library and methodlist
b
denotes the
method nodes that are associated with the respective
compound node n
c
b
. Max edges ma ∈ E
ma
are dis-
played with red arrows in graphical plan structures.
Definition 3.4 (Ordering/Precondition Edge Dictio-
nary). PrecondEdges has the methods n
m
j
as keys,
while containing a list of precondition lists for each
activity within the method:
PrecondEdges = {n
m
1
: [c(n
f
1
), c(n
f
2
), ..., c(n
f
m1
)],
n
m
2
: [c(n
f
1
), c(n
f
2
), ..., c(n
f
m2
)], ...,
n
m
j
: [c(n
f
1
), c(n
f
2
), ..., c(n
f
m j
)]}.
Hereby, each c(n
f
m j
) denotes a list of precondition ac-
tivity nodes that are associated with the activity node
n
f
m j
. The number of entries f
m j
associated with a
method j depends on the number of activities that are
assigned to the respective method in the SumEdges
dictionary. Precondition edges o ∈ E
o
are displayed
with green arrows in graphical plan structures.
Definition 3.5 (Activation Sum Edge Dictionary).
ActSumEdges is a dictionary that contains a list of bi-
nary values, with a separate binary value for every ac-
tivity within a method indicating whether the precon-
ditions of the activity in PrecondEdges are fulfilled.
Accordingly it is defined as:
ActSumEdges = {n
m
1
: actsum
1
, n
m
2
: actsum
2
,
..., n
m
j
: actsum
j
},
where j denotes the number of methods within the
plan library and actsum
j
denotes the list of activation
values of the sum edges connecting the activity nodes
n ∈ N with their respective methods n
m
j
∈ N
m
.
In the following we explain our adaptations and
extensions to the original ASN framework. Saffar
et al. (2015) introduced a uniform decay of activa-
tion values, which we replace with a time independent
binary activation value definition for operator nodes,
in order to take long and complex activity sequences
into account. Thus, we prevent the decay of an ac-
tivity’s relevance throughout time which means that
activity durations do not influence the contribution to
the recognition process. This formulation also en-
ables the connection of the Machine Learning model
outputs and the ASN operators, as the ASN is able to
accept time discrete activity recognitions.
Moreover, we introduce a new weighting scheme
for the edges connecting activity nodes within the
ASN. Our weighting process relies on the frequency
Automatic Recognition of Human Activities Combining Model-based AI and Machine Learning
17

of an activity within competing plans, and the higher
importance of compound nodes that incorporate sev-
eral different activities. We initialize the weights of
the sum edges as
1
|subactivities(n
m
)|
. The weighting of
the sum edge of an activity is relatively increased to
the other sum edges within the method, if the activity
is rather unique for the respective plan. The weighting
of sum edges connecting compound nodes to method
nodes is amplified relatively to simple operator nodes.
Moreover, we normalize the weights of sum edges,
which enforces a comparability between activities in-
dependent of the hierarchical level.
As another extension we introduce state effects
that represent the validity of a certain state upon com-
pleting a subgoal within the ASN. This is important
for recognizing activity sequences that are likely to
be repeated several times. A state effect is valid until
another state effect is introduced.
Furthermore, we introduce a backpropagation
procedure that enables predictions about future ac-
tivities. At first, we determine the most likely goal
with the highest activation value and then consider the
child nodes of the method that constructs this com-
pound node. We iteratively traverse the hierarchy to-
wards the lowest levels in the plan constituting the
currently assessed goal. In case of compound nodes,
we iterate through the child nodes of their method. On
each hierarchical level, the validity of the precondi-
tions is checked as they serve as an indicator for pos-
sible next activities. When predicting future activities,
the ones that have activated sum edges due to fulfilled
preconditions and that are directly subsequent to pre-
viously activated activities are considered. Lastly, the
ASN recovers from misclassifications and missed ac-
tivities by setting the activation value of an activity to
1 if it has been missed or misclassified, while serv-
ing as a precondition for two subsequent successfully
recognized activities.
3.1.2 Activation Spreading Process
The activation value propagation process is initiated
by a new activity recognition. When the activation
value of a newly recognized activity is updated to 1,
we start by iterating from the lowest level methods
to the highest level ones in order to ensure a correct
activation value propagation within the hierarchy.
All preconditions of an activity have to be valid
in order for an activity to spread its activation value.
If all preconditions and state effect preconditions are
fulfilled the respective sum edge of the considered ac-
tivity is activated. The value of ActSumEdges is up-
dated from 0 to 1 for the relevant activity. After all
activities of a method have been considered, the acti-
vation value of the method gets updated by summing
over the weighted activation values from its activities.
Upon a method achieving the activation value 1, the
activation values of the activities involved with that
method get reset to 0 while the compound node main-
tains its activation value at 1. The compound node
itself is going to get reset if the method node it con-
tributes to achieves the activation value 1.
3.2 Structural Recurrent Neural
Network
In this section we explain the action recognition based
on the action-affordance S-RNN proposed by Jain
et al. (2016) and our action S-RNN.
3.2.1 Feature Preprocessing
In order for the S-RNN to be able to perform ac-
tion and affordance recognition we first introduce the
feature preprocessing steps that are inspired by Kop-
pula et al. (2013). The features are computed based
on skeleton and object tracking performed on sta-
tionary video data. The object node features de-
pend on spatial object information within the seg-
ment, whereas the human node features rely on the
spatial information of the upper body joints. The
edge features are defined for object-object edges and
human-object edges within one segment of the spatio-
temporal graph. The temporal object and human fea-
tures are defined based on the relations between ad-
jacent temporal segments. Similar to Koppula et al.
(2013), the continuous feature values are discretized
by using cumulative binning into 10 bins yielding
a discrete distribution over feature values. The re-
sulting dimension of the feature vector thus yields
(number of features) × 10 . As a result we obtain a
histogram distribution over the feature values that is
especially useful when adding object features.
The spatio-temporal graph depicted in Figure 2
represents a concise representation of the relation be-
tween the human and the objects within and between
temporal segments. In order for the spatio-temporal
graph to model meaningful transitions, the video is
H HH
t-2 t-1 t
Figure 2: Exemplary spatio-temporal-graph with one hu-
man and two object nodes within three temporal segments.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
18

segmented in a way that every segment ideally only
contains one action. The segmentation of videos ac-
cording to actions is not investigated here, and we rely
on the provided ground truth segmentations. Labels
of human nodes are the action labels whereas an ob-
ject can be annotated with an affordance label. The
semantic affordance of an object depends on the ac-
tivity it is involved in. For example in the activity
‘pour from bottle to glass’ the action label is ‘pour’
and the affordance labels of the bottle and the glass
are ‘pourable’ and ‘pour-to’. Koppula et al. (2013) in-
troduced the notion of affordances in order to define
how an object is being interacted with in the scene.
3.2.2 Action-affordance S-RNN and Action
S-RNN
Firstly, we consider the original S-RNN based on the
joint action-affordance recognition. Hereby, an object
only has one affordance at a time which can vary over
time depending on its usage. Within a segment of the
spatio-temporal graph, while there is always only one
human node corresponding to one action label, there
is generally a higher number of object nodes which
varies depending on the scenario that results in a vary-
ing number of affordance labels. Thus, the overall
action-affordance model has to be separated into two
submodels, one dealing with affordance classification
and the other dealing with action classification.
However, compared to Jain et al. (2016), we do
not consider semantic affordances and only focus on
action classification while relying on spatio-temporal-
graph features. The architecture of this action S-RNN
model is shown in figure 3. Hereby, the Human Input
layer receives the concatenation of the human node
and the human temporal edge features as an input. As
we consider only one human node within a tempo-
ral segment the number of features remains the same
throughout temporal segments. The Ob ject
Input
layer receives the concatenation of the object node,
the object-object edge and the object temporal edge
features as an input. However, as the number of ob-
Human_Object Object_Input Human_Input
LSTM
Concatenate
Out_Action
LSTM
LSTM LSTM
Figure 3: Our action S-RNN implementation.
jects might vary throughout temporal segments, the
length of concatenated features might vary accord-
ingly. Thus, we have to sum over the object related
features of each object in order to achieve a fixed
length representation. Empirically, the aforemen-
tioned cumulative binning process for discretizing the
features is important to limit the information loss dur-
ing the feature summation. The Human Ob ject input
layer receives the human-object edge features as an
input. As the human node is connected to a poten-
tially varying number of object nodes, we sum over
the discretized human-object edge features.
The advantage of our approach is that we do not
need affordance labels as we only focus on action
classification which simplifies the dataset creation
process. Differently to the original S-RNN the in-
puts are not divided into terms that contribute to either
the affordance or the action classification but rather
we directly use all features to perform action clas-
sification. Thus, the action classification is not only
trained on the human and human-object edge features
but also on object and object-object edge features of
the spatio-temporal-graph representation.
3.3 Combining Machine Learning
Results with ASN
In the following we combine action and object recog-
nitions from the S-RNN into feasible action-object
combinations which are passed as an input to the
ASN model. We rely on simulated data where labels
of objects and kitchen furniture are available. Thus,
the object recognition part is not explicitly consid-
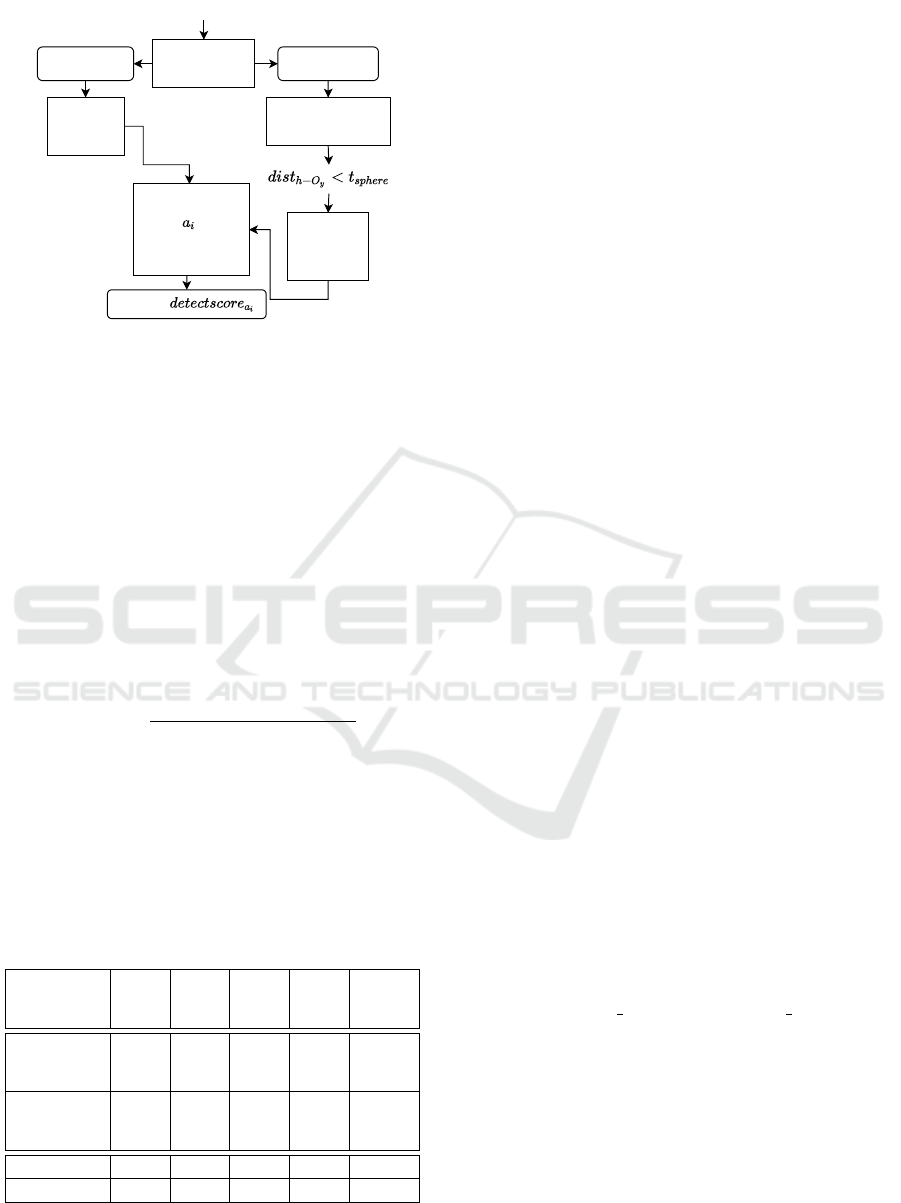
ered. The main focus of the matching process de-
picted in figure 4 is to combine probabilistic assess-
ments regarding actions with object recognitions, and
verify whether these action-object combinations re-
sult in feasible activities.
Given object recognitions, we only consider ob-
jects within imaginary spheres around the human
hand joints (t
sphere
). Feasible activities are obtained
by comparing the action-object combinations a
i
with
available operator activity nodes within the plan li-
brary. For each combination we define a joint detec-
tion score consisting of three parts. The first part is
the score s
dist−inv
(O
p
) that is calculated for each ob-
ject O
p
within an action-object combination based on
the equation
s
dist-inv
(O
p
) =
t
sphere
− dist
human- joint-O
p
t
sphere
. (1)
The second one is the probability prob
a
i
of the action-
object combination. The third part enables the high-
level reasoning process to influence the low-level ac-
tivity recognition process by considering previous
Automatic Recognition of Human Activities Combining Model-based AI and Machine Learning
19
Action
recognition
pour: 0.6,
cut: 0.3,
move: 0.1
Object
recognition
bottle, faucet, glass,
cup, counter, knife,
tomato
bottle, glass,
cup, knife,
tomato
Feasible action-
object combinations
:
pour+bottle+cup,
pour+bottle+glass,
cut+knive+tomato
Calculate
Video + Sensory Information
Machine Learning
Models
Figure 4: Matching process between action and object
recognition and the ASN architecture.
recognitions of the ASN. If the action-object combi-
nation is contextually valid and contributes to the goal
g, which has been assessed as the most likely one, the
detection score is increased by a predefined factor q.
Contextual validity is verified by comparing the pre-
dictions regarding the next activity made by the ASN
in the previous temporal segment with the currently
considered action-object combination. If an action-
object combination does not contribute to the goal g
or no goal has been determined the detection-score re-
mains unchanged. Each detection score detectscore
a
i
is defined by
detectscore
a
i
=
∑
n
seg
p
(prob
a
i
)(s
dist-inv(O
p
)
)
n
seg
(q), (2)
where index i denotes the ‘i-th’ feasible action object
combination for the current segment, index y denotes
the ‘y-th’ recognized object and n
seg
equals the num-
ber of objects in the scene. The final activity recogni-
tion is the one with the highest detectscore
a
i
.
Table 1: Action recognition Macro average F1 score (F1)
and accuracy (Acc) of the action-affordance S-RNN and our
action S-RNN on the test sets of the 4-fold cross-validation.
Metric
1.
Set
2.
Set
3.
Set
4.
Set
Aver-
age
F1 (Act-
Aff)
0.88 0.62 0.81 0.77 0.77
Acc (Act-
Aff)
0.92 0.76 0.82 0.76 0.82
F1 (Act) 0.88 0.66 0.75 0.66 0.74
Acc (Act) 0.89 0.76 0.78 0.73 0.79
4 EVALUATION
4.1 S-RNN Results on CAD120 Dataset
In the following we compare the performance of the
action-affordance S-RNN with the action S-RNN. We
use the features provided by the CAD120 dataset
based on the multi-segmentation approach by Kop-
pula et al. (2013).
For evaluation purposes we employ 4-fold cross-
validation. We use the RMSprop optimizer provided
by Keras with a learning rate of 0.001, and categori-
cal crossentropy as a loss function. When training the
action-affordance S-RNN and our action S-RNN for
100 epochs on a batch size of 4, the results on the dif-
ferent test sets are displayed in Table 1. By summing
over all object features within a temporal segment,
compared to training on them separately, the perfor-
mance deteriorates on average by roughly 3 percent.
An important reason for that is that during the train-
ing process we have not been able to accurately dis-
tinguish the respective affiliation of objects to a cer-
tain temporal segment. So we summed over the aver-
age number of objects in a temporal segment within
the whole training dataset. Thus, object features of
one temporal segment might be summed with object
features of another segment. When object affiliation
to temporal segments is known, the performance gap
should decrease significantly. This hypothesis is go-
ing to be investigated in section 4.2 based on simu-
lated data where the object affiliation is recorded.
4.2 Hybrid Model Results on Simulator
Data
In the following the hybrid model performance is
evaluated based on our action S-RNN classifica-
tion performance and the activation spreading graphs
of our adapted ASN. The data originates from the
Human-Object Interaction Simulator ‘HOIsim’ of Za-
kour et al. (2021) which randomly samples activi-
ties contributing to a plan under varying kitchen en-
vironments. The simulator data consists of the plans
Break f ast, Serve Lunch and Prepare Lunch. Fur-
thermore, the plan library is extended by plans con-
tributing to the goals of drinking Tea, Co f f ee and
Juice. We compare the performance of the action-
affordance S-RNN and the action S-RNN on simu-
lator data, with the aformentioned training metrics,
and combine the resulting recognitions with the object
recognitions. During action and affordance recogni-
tion we consider 12 actions and 18 affordances.
Our action S-RNN that relies on the summed ob-
ject feature vectors yields a macro average F1 score
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
20

grab
spoon
place
spoon
on table
grab
bowl
place bowl
on table
grab
cereal
pour
cereal
into bowl
grab
milk
pour
milk
into
bowl
grab
spoon
eat with
spoon
m_make_cereal
make_cereal
m_eat_cereal
eat_cereal
m2_eat_cereal
grab
spoon
eat with
spoon
state-effect:
bowl : cereal
grab
spoon
m_clean_cereal
clean_cereal
state-effect:
bowl-cereal
place
spoon in
sink
grab
bowl
place
bowl in
sink
grab
cereal
place
cereal in
cupboard
grab
milk
place milk
in
refrigerator
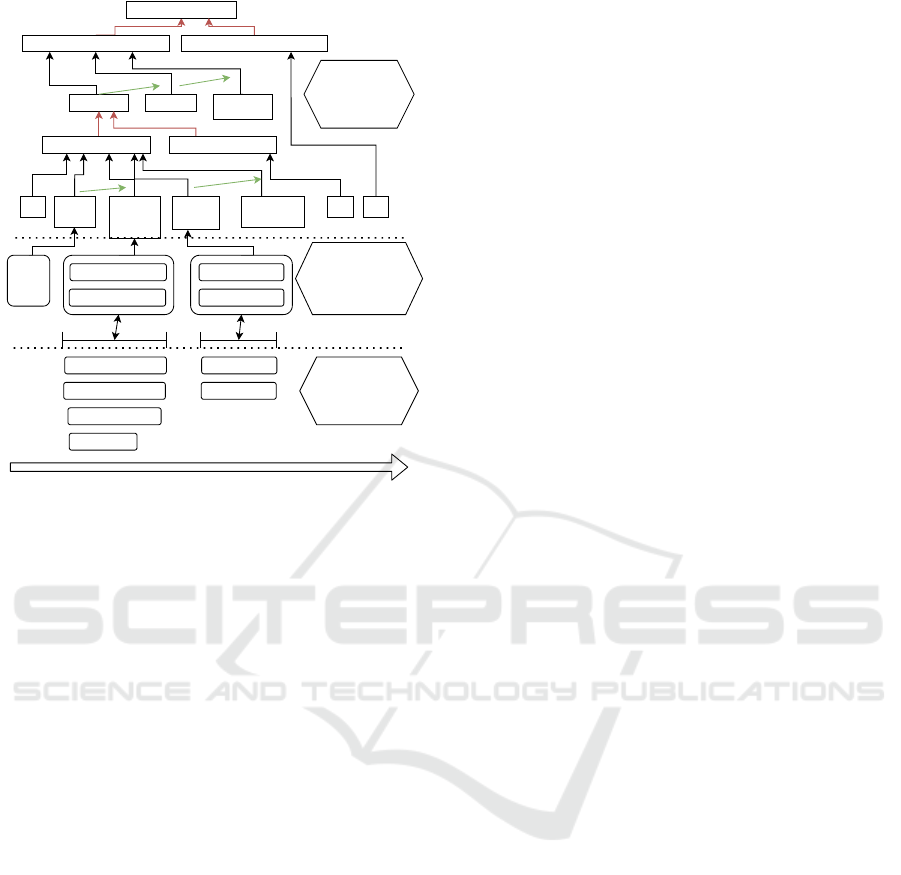
Figure 5: ASN architecture of the plan for the goals eat cereal and clean cereal.
of 0.97 and an accuracy of 0.99 on the simulator data.
The action-affordance S-RNN returns a macro aver-
age F1 score of 0.968 and an accuracy of 0.986. In
contrast to the CAD120 dataset evaluation, the per-
formance of both models is quite similar. The sim-
ilar performance metrics of the models on the simu-
lator data might further indicate that associating ob-
jects to the correct temporal segment and action label
is especially important for the action S-RNN. Given
the action recognitions of our action S-RNN we con-
sider only the three actions with the highest probabil-
ities and the first and second closest objects based on
whether the action requires one or two objects. The
activity sequence that we consider, follows the un-
derlying intention of making breakfast and its plan
structure is depicted in figure 5. In figure 6 the ac-
tivity recognitions are displayed on the x-axis and
the activation values are displayed on the y-axis. A
change in the activation value of a method shows a
successful activity recognition contributing to the spe-
cific method of the plan library.
The first subgoal that the human follows is
make cereal which is indicated by the highest ac-
tivation values of the yellow line. The green line
corresponds to the method of eating cereal, which
is based on the make
cereal subgoal. On the one
hand the relatively frequent activities like grab milk
or grab spoon contribute less to the recognition pro-
cess which can be concluded from the relatively low
slopes. On the other hand infrequent and more
plan specific activities like pour cereal into bowl
and pour milk into bowl lead to higher slopes of the
yellow line. Activities that do not contribute to any
method in the plan library do not influence the recog-
nition process. As soon as the method m make cereal
reaches the activation value 1, all activation values of
the activity nodes contributing to this method are re-
set to 0 to enable new recognitions. Moreover, the
method m2 eat cereal reaches the activation value 1
as the state effect precondition of the bowl containing
cereal is fulfilled. By considering state effects, the hy-
brid model is able to recognize the human resuming
an activity after it has been interrupted. After that the
human tidies up the objects used in the breakfast ac-
tivity which contributes to the goal clean cereal. The
activities associated with the cleaning activity are en-
abled by the state effect of the bowl containing cereal.
While the clean cereal and make cereal method
share similar activities one can see from the lower
activation value lines of the method m make cereal
compared to m clean cereal that there is no confu-
sion regarding the goal assessment as long as the ac-
tivity context is correct. Moreover, with the back-
propagation procedure one can verify which activity
recognitions serve as preconditions for subsequent ac-
tivities. Thus, we can make predictions regarding fu-
ture activities throughout the recognition sequence.
For example in case of the grab cereal recognition,
one future prediction of the hybrid model is the activ-
ity pour cereal into bowl as it is conditioned on this
activity. As there is no milk in the bowl up to that
point in time in the example the model also suggests
the activity grab
milk as it has no precondition itself
but contributes to the goal of eating cereal.
5 CONCLUSION
Machine Learning based frameworks like LSTMs are
incapable of verifying logical preconditions, captur-
ing multigoal activity execution and making long-
term activity predictions. Hence, we propose a hybrid
model consisting of a Machine Learning and a knowl-
edge based part. Compared to the action-affordance
Automatic Recognition of Human Activities Combining Model-based AI and Machine Learning
21
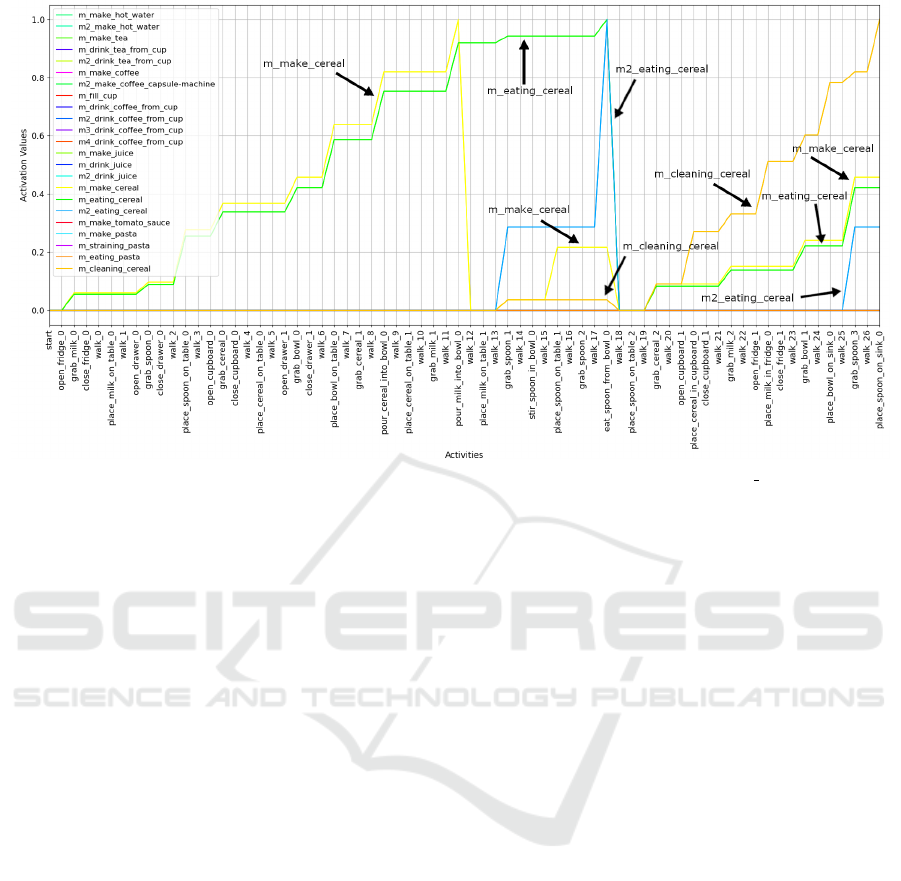
Figure 6: Activation spreading graph of a simulator test sample with the underlying goal eat cereal.
S-RNN, our action S-RNN is able to obtain similar re-
sults on simulated activity data without additional ef-
fort for affordance labeling. Our proposed ASN deals
with activity recognitions, misclassifications, missing
activities and is capable of predicting future activitiv-
ities. As the Knowledge Base is defined by a human
expert, one could address the limited validity of the
plan representation by automatically extracting struc-
tured plans from sensor data. Additionally, the ap-
proach can be extended to egocentric video data. Fur-
thermore, the object classification part has to be in-
vestigated for activity recognition on real-world data.
ACKNOWLEDGEMENT
This work has been funded by the Initiative Geriatron-
ics by StMWi Bayern (Project X, grant no. 5140951).
REFERENCES
Bokhari, S. Z. and Kitani, K. M. (2016). Long-term activity
forecasting using first-person vision. In Asian Confer-
ence on Computer Vision, pages 346–360. Springer.
Chen, L. and Nugent, C. D. (2019). Composite activity
recognition. In Human Activity Recognition and Be-
haviour Analysis, pages 151–181. Springer.
Du, Y., Lim, Y., and Tan, Y. (2019). A novel human activ-
ity recognition and prediction in smart home based on
interaction. Sensors, 19(20):4474.
Goldman, R. P., Geib, C. W., and Miller, C. A. (2013).
A new model of plan recognition. arXiv preprint
arXiv:1301.6700.
Jain, A., Zamir, A. R., Savarese, S., and Saxena, A.
(2016). Structural-rnn: Deep learning on spatio-
temporal graphs. In Proceedings of the IEEE con-
ference on Computer Vision and Pattern Recognition,
pages 5308–5317.
Koppula, H. S., Gupta, R., and Saxena, A. (2013). Learn-
ing human activities and object affordances from rgb-
d videos. The International Journal of Robotics Re-
search, 32(8):951–970.
Levine, S. and Williams, B. (2014). Concurrent plan recog-
nition and execution for human-robot teams. In Pro-
ceedings of the International Conference on Auto-
mated Planning and Scheduling, volume 24.
Ramırez, M. and Geffner, H. (2011). Goal recognition over
POMDPs: Inferring the intention of a POMDP agent.
In IJCAI, pages 2009–2014. Citeseer.
Saffar, M. T., Nicolescu, M., Nicolescu, M., and Rekabdar,
B. (2015). Intent understanding using an activation
spreading architecture. Robotics, 4(3):284–315.
Shan, D., Geng, J., Shu, M., and Fouhey, D. F. (2020). Un-
derstanding human hands in contact at internet scale.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 9869–
9878.
Yordanova, K., L
¨
udtke, S., Whitehouse, S., Kr
¨
uger, F.,
Paiement, A., Mirmehdi, M., Craddock, I., and Kirste,
T. (2019). Analysing cooking behaviour in home set-
tings: Towards health monitoring. Sensors, 19(3):646.
Zakour, M., Mellouli, A., and Chaudhari, R. (2021).
HOIsim: Synthesizing realistic 3d human-object in-
teraction data for human activity recognition. In
2021 30th IEEE International Conference on Robot
& Human Interactive Communication (RO-MAN), pp.
1124-1131.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
22
