
A 3D Matching Method to Compare a Scan to Its Reference using 3D
Registration and Monte Carlo Metropolis Hastings Optimization for
Industrial Inspection Applications
Clément Dubosq
a
and Andréa Guerrero
b
Capgemini Engineering R&I France, 4 avenue Didier Daurat, Blagnac, France
Keywords: Point Cloud Registration, 3D Model, 3D Matching, ICP, Monte-Carlo Metropolis Hastings, Point Cloud
Processing, Defect Detection, Automatized Inspection.
Abstract: Currently in industry, inspection tasks are essential to ensure a product efficacity and reliability. Some
automated tools to inspect, i.e. to detect defect exist, but they are not adapted to an industrial inspection
application. Most of industrial inspection is human made. In this article, we propose a new algorithm to match
a 3D point-cloud to its 3D reference to track visual defects. First, we reconstruct a 3D model of an object
using Iterative Closest Points (ICP) algorithm. Then, we propose an ICP initialization based on a Monte Carlo
Metropolis-Hasting optimization to match a partial point-cloud to its model. We applied our algorithm to the
data measured from a Time-of-Flight sensor and a RGB camera. We present the results and performance of
this approach for objects of different complexities and sizes. The proposed methodology shows good results
and adaptability compared to a state-of-the-art method called Go-ICP.
1 INTRODUCTION
Today in industry, inspection remains a complex and
hard task to achieve for an operator. Most of its
activity is done by eye, sometimes in hostile or dark
environment e.g., in a wind turbine nacelle or in a
pipe system for energy distribution. Automatize part
of their task with computer vision or Artificial
Intelligence (AI) will help make their work less
difficult. Such technology assistance should answer
to ground reality of the inspection work:
- These methods must be applicable in real time.
The operator needs the result during its
inspection cycle to buy replacement parts.
- These approaches must be precise. In some fields
like aeronautics.
- These solutions require to treat any object size.
In aeronautics, the operator inspects objects from
a bolt to a turbine.
Online drones, robots or other platforms equipped
with sensors can be used to recover data on the
condition of the object. W. Chen et al., 2020 studied
the state of power lines using a drone using a deep
a
https://orcid.org/0000-0002-6644-3926
b
https://orcid.org/0000-0003-3345-1572
learning (DL) approach to classify foreign objects.
Saavedra et al., 2021 also used a DL approach for
analyzing X-Ray images. Overall, classification and
object detection are essentially based on Machine
Learning (ML) technics. However, these methods
efficiency depends on the training database, its
diversity and size. For industrial inspection, this will
imply a large training database for each inspection
application. Yet, to our knowledge, there is no public
database for industrial inspection.
Instead of using ML approach, a well-known
approach consists in comparing a scan of the object
of interest with its no-defect 3D reference. For
example, in Abdallah et al., 2020; Abdallah et al.,
2019, they used Computer-aided design (CAD) as the
no-defect reference. Such approach needs CAD,
which is not always available in industry, especially
in aeronautics where pieces are often replaced by new
models.
In this work, we present our method to compare
an object 3D scans with its reference model to detect
defects. Our goal is to provide an approach fitting the
inspection requirements. Our approach can provide a
518
Dubosq, C. and Guerrero, A.
A 3D Matching Method to Compare a Scan to Its Reference using 3D Registration and Monte Carlo Metropolis Hastings Optimization for Industrial Inspection Applications.
DOI: 10.5220/0010779100003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 518-525
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

3D model of the object to have a standard reference,
which means it does not require CADs.
2 RELATED WORK
In this section, we briefly introduce state-of-the-art
methods for evaluate changes between a 3D model
and a partial scan of an object. First, we present
methods creating a 3D model in a section called 3D
reconstruction. Then, we present several methods to
evaluate changes on the object, i.e., 3D matching.
Finally, we will present some optimization methods
to improve 3D matching.
2.1 3D Reconstruction
The literature shows that 3D reconstruction is a
common problem. There is two main approaches
studied: photogrammetry (Bhadrakom, 2016) and
point cloud processing (Bethencourt & Jaulin, 2013).
The first category reconstructs 3D models using set of
2D images and camera information via Structure from
Motion to produce point cloud. Points of interest are
extracted using Scale-invariant Feature Transform
(SIFT). The second category, called point cloud
processing, is mainly based on merging partial point
clouds using 3D matching algorithm (Bethencourt &
Jaulin, 2013). Partial point clouds are usually pre-
matched using interest points extractor like SIFT.
Then, Random Sampling Consensus (RANSAC)
(Zhou et al., 2016) is applied to get a first point cloud
alignment. Finally an Iterative Closest Point (ICP)
(Besl & McKay, 1992) step refines the alignment
estimation. If available, pose estimation can be
improved using Inertial Measurement Unit (IMU).
However, these methods are not suited for
inspection application mostly due to the lack of
precision for photogrammetry, lack of data for ML
approaches, and due to the time cost and adaptability
for existing 3D matching method. To resolve this
issue, we have chosen a simple method. It is based on
existing tools of 3D reconstruction, allowing to obtain
a 3D model of an object under few minutes with a
precision around 1mm. A set of 3D scans are fused to
reconstruct an object based on ICP color (Park et al.,
2017).
2.2 3D Matching
A wide range of algorithms exists for matching two
point-clouds. Each of them has advantages and
limitations. We can cite for example RANSAC
combined with Fast Point Feature Histogram (FPFH)
(Rusu et al., 2009) or Kernel correlation (KC) (Tsin
& Kanade, 2004). However, these approaches suffer
from intrinsic limitations such as the high
computational cost for the most precise ones, or the
non-uniqueness of the minimization solution due to
the high dimensionality problem. Iterative Closest
Point is the widest and commonly used method for
registration (Wang & Zhao, 2017) due to its fitness
and precision. They are many studies to optimize and
to improve ICP (Lamine Tazir et al., 2018; Park et al.,
2017; Pomerleau et al., 2015). This method consists
in minimizing the following criterion:
𝜒
𝑝
⃗
𝑅
𝑝
⃗
𝑡
⃗
(1)
where 𝑝⃗
is the position of the target point cloud, 𝑝⃗
is
the corresponding points in the source point cloud, 𝑅
is a rotation matrix and 𝑡
⃗
a translation vector. A k-
Nearest Neighbors (k-NN) algorithm evaluates the
pairwise similarity. As shown in the previous
equation, ICP is a self-consistent method which
requires to initialize some parameters. Due to the high
dimensionality of the equation to minimize, local
minima can occur. However, adding constraints to the
problem can help with this issue. We present three
commonly used ICP approaches:
- ICP point-to-point (Pt to Pt) (Arun et al., 1987):
This is the initial approach developed. It is used
as base for every ICPs variants.
- ICP point-to-plan (Pt to Pl) (Besl & McKay,
1992): This variant add surface constrain to
equation (1).
- ICP color (Park et al., 2017): Based on ICP Pt to
Pl, this variant add the RGB information of the
point cloud as another constrain in the
minimization equation.
However, such methods alone require an a priori
to be executed. This implies or to have two scans with
an initial important overlap, or to have an
approximated form of the transformation matrix. To
define the most suited ICP approach for our problem,
a preliminary study was performed on complex object
as a pipeline system. Results for scans matching show
better results for ICP color in term of precision and
overlap between two scans. Color information add a
degree of freedom that help to get optimal 3D
matching. So, we applied ICP color to generate the
3D models used as reference for the object inspection.
2.3 Global Optimization
As we said in the section before, ICP and generally
3D matching methods are sensitive to initialization.
A 3D Matching Method to Compare a Scan to Its Reference using 3D Registration and Monte Carlo Metropolis Hastings Optimization for
Industrial Inspection Applications
519

They are not sufficient to match points in any cases
since these methods can converge to local minima. A
common approach is to use global optimization for
initialization (Linh & Hiroshi, 2015; Yang et al.,
2016). The literature shows different methods. First
category being deterministic optimization methods.
These methods use rigorous optimization providing a
theoretical guarantee to find the best solution. We can
cite Bound and Branch (BnB) as an example of such
approach (Land & Doig, 2010). Yang et al., 2016
proposed an algorithm that make use of BnB
combined with ICP to find global optimal matching
called Go-ICP. In such method, a rough optimization
is done using BnB approach, followed by a fined ICP
optimization. The BnB and ICP procedure is repeated
until convergence is reached. However, these
methods are computationally expensive since they
explore recursively all the possibilities to get the
global minimum. Second category is stochastic
optimization. A well-known example is Monte-Carlo
based simulation. These methods use randomness to
explore all the solution and retain only the best one.
They are easy to implement but require important
computational time to guarantee the optimal solution.
The last category is metaheuristic optimization
methods based on iterative stochastic algorithms.
They use random sampling to extract information of
a given cost function local properties. These methods
allow to get optimal solution but do not assure to find
the optimal solution. Linh & Hiroshi, 2015 proposed
an approach based on simulating annealing
(van Laarhoven & Aarts, 1987) combined with ICP to
do point cloud matching. Their procedure is similar to
Go-ICP procedure in which a simulated annealing is
done instead of BnB. Such approach is not suited due
to possible slow convergence and high risk to be stuck
in local solution for symmetric object and/or plan.
For this work, we used a metaheuristic method of
optimization refer as Monte Carlo Metropolis
Hastings (MCMH) (Hastings, 1970). This method
based on the Markov chain is simple to adapt to our
problem. However, such methods are limited alone
because finding the best matching solution would be
expensive in time cost. In the next section, we explain
our approach which uses MCMH to find an
approximate solution before refinement with ICP.
3 3D MATCHING APPROACH
In this work, we propose a new complete approach to
detect defects by comparing a generated 3D model
with a partial scan. Figure 1 shows the proposed
approach based on 3D registration with ICP and
global optimization. First, we apply preprocessing on
point clouds to clean it. Then a first 3D matching
evaluation is done using MCMH. The 3D matching is
refined with a last ICP color (Park et al., 2017)
calculation. Our solution gives as output a
comparison between the scan and the reference 3D
model.
In a first part, we will present the pre-processing in
which we present cleaning steps of scans before
matching. Then, we will present our matching method
based on MCMH combined with ICP color.
3.1 Pre-process
Scans are cleaned before 3D matching due to possible
outliers created by the sensor used for scan capture.
Cleaning process stands in three steps. First, we
remove the background. Above a certain distance, the
sensor suffers from distortion in the measurement.
Given the a priori of working on a close-by object, we
remove points with a depth over a threshold
dependent of the sensor range sensibility
. Secondly,
if the object is placed on a surface, we remove the
surface. RANSAC is used to estimate plan equation
and to remove points from and below the plan.
Thirdly, we apply a statistical outlier removal method
to remove points considered as noise. We also use
clustering method (Ester et al., 1996) to highlight
cluster of points and discriminate clusters having less
points than an empirically defined threshold (~ 500
points). This allows to only keep the points of the
object of interest.
Figure 1: Scheme of the 3D matching process of our developed approach. We focus in this article on the 3D matching.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
520
3.2 Scan Matching
We know ICP requires a good initialization to have
good results due to its self-consistent nature (cf.
equation (1)). That is why, usually, ICP methods are
used as a last step for fine registration. To solve our
matching problem, we need a global 3D matching
approach. We show in the related work section that
the optimization field helps to find a global optimal
solution. We present here our approach based on
MCMH combined with ICP to match a misoriented
scan to its 3D reference. We also compare our method
to Go-ICP (Yang et al., 2016) a state-of-the-art
method. Since this last method is based on a
deterministic approach, we assume it should find
correct solution, and so it can be used as a
comparison.
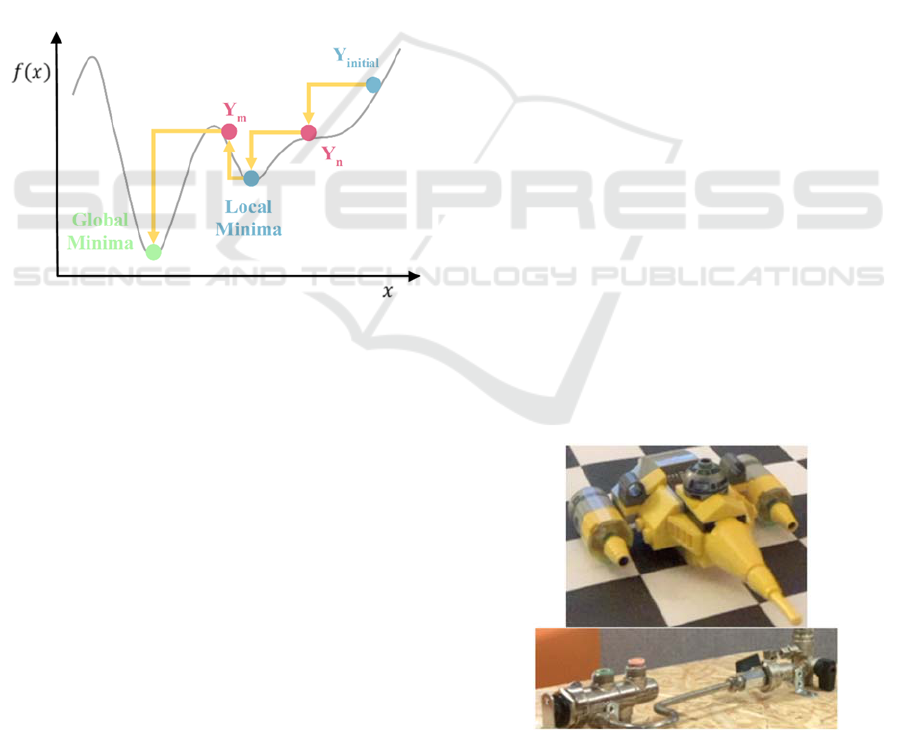
3.2.1 Monte-Carlo Metropolis Hastings
Figure 2: Scheme of the MCMH exploration. MCMH
allows to overcome barrier to find global minima.
As the previous section explains it, MCMH approach
is a meta-heuristic method used for phase spaces
exploration and optimization of cost function. In our
case, phase space corresponds to translation and
rotation spaces to apply on the scan point cloud to
match the 3D model point cloud. The Figure 2
illustrates the approach. Rotation and translation are
initialized with given values (Y
initial
in Figure 2).
Rotation matrix expression is derived from Euler
angle. Then, we apply random variation on rotation
angles and translation elements. A new
transformation is then evaluated (Y
n
in Figure 2). If
the new obtained configuration minimizes the overlap
between the two points clouds, then the solution is set
as the new reference. Else, in a classical Monte-Carlo
Markov Chain (MCMC) simulation, the solution is
rejected. However, in MCMH an acceptance criterion
is added: The Metropolis-Hastings criteria. It is the
probability of transition between the previous and the
new estimated values of the cost function. Usually,
the probability is expressed as follow:
p
exp
𝑓
𝑥
𝑓
𝑥
∗𝛽
(2)
With 𝛽 the inverse of a fictitious temperature. A
uniformly random number is drawn. If the random
number is lower to the computed probability of
transition, then the new state is kept (as shown with
the kept solution Y
m
in the Figure 2). Else the state is
finally rejected. This procedure allows to exit local
minimum and to overcome barrier in the phase space.
A new random variation is drawn at each iteration.
This procedure allows to access the global minima.
3.2.2 Hungarian Distance Criteria
To compute a cost function expressing the similarity
between two point clouds, we use pairwise Euclidian
distance between source and target. We compute a
cost matrix which is optimized using the Hungarian
algorithm (Kuhn, 1955). The diagonal of the cost
matrix corresponds to the smallest pairwise distance
between the two considered points clouds. The
MCMH will optimize the value of the cost matrix
trace.
First, cost matrix between points of source and
target is evaluated. Then, we execute the Hungarian
algorithm to solve the assignment problem.
Concretely, solving the problem consists in
performing permutation operation on the cost matrix
to minimize its trace. Each of the diagonal elements
corresponds to the scan and source optimal pairwise.
We compute the trace and divide the value by the
number of diagonal elements. We refer to this value
as the average Hungarian distance in the rest of this
article. The following equation present the equation
to minimize:
Figure 3: Photo of the lego and pipeline systems used for
our tests.
A 3D Matching Method to Compare a Scan to Its Reference using 3D Registration and Monte Carlo Metropolis Hastings Optimization for
Industrial Inspection Applications
521

𝐷
,
1
𝑁
min
,
𝑇𝑟𝐿
𝐶
𝑅
(3)
Where 𝐷
is the average Hungarian distance we
seek to minimize, 𝑁
is the number of diagonal
elements of the cost matrix 𝐶
, and 𝐿
and 𝑅
are
respectively line and row permutation matrix. With
the MCMH, we seek to minimize this value by
applying variations on rotation and translation.
3.2.3 Our Matching Algorithm
We present below a pseudo-algorithm which explain
the global matching procedure of our approach.
Pseudo-algorithm 1: Our approach based on MCMH
o
p
timization
p
rocedure.
Input: Scan point cloud S and 3D reference model
point cloud M
Output: Optimal transformation T
of S to M
1: Compute topological descriptor of S and M
S’ and M’
2: Align the center of mass of S’ and M’
3: Compute the initial average Hungarian distance
𝐷
4: Initialize the rotation and translation
5: MCMH algorithm
Best approximate transformation T
, 𝐷
,
6: Rotation of 180° on Oy axis of S’
7: Perform the same described procedure between line
2 and 5
Best approximated transformation T
, 𝐷
,
8: if 𝐷
,
𝐷
,
then:
9: | T
T
10: ICP color evaluation based on T
Compute T
11: return T
In step 1 of our method, topological descriptor
corresponds to a simplified triangular mesh. Point
clouds are converted into triangular mesh using
Poisson surface reconstruction of Kazhdan et al.,
2006. Simplification of triangular mesh uses voxel
downsampling on vertices. Then we have a simplified
shape of the original point cloud. Vertices from this
shape are used for cost matrix evaluation. This step is
important to reduce computation cost.
First MCMH is computed, followed by a second
MCMH on the same scan rotated by 180° on the Oy
axis. The choice of the Oy axis is motivated by the
idea that the object is placed on a surface. This change
of initial point allows to begin the MCMH procedure
to a different place in the phase space and so, to access
a different path to the global solution. This second
MCMH helps to overcome similarity problem (like in
quasi-symmetric systems).
Table 1: Matching results for the model of lego with our
MCMH approach.
Matching
time (s)
Success
rate
(%)
RMSE
(mm)
Fitness
(%)
Scan 1
13.1 ±
1.4
65.5
0.73 ±
0.04
83.1 ±
1.1
Scan 2
13.2 ±
0.6
71.5
0.66 ±
0.04
91.3 ±
2.3
4 TESTS AND PERFORMANCES
4.1 Technical Settings
Calculations and tests are done on a Mac OS
computer with Intel® Core™ i9 with 8 cores, a
frequency of 2.3 GHz and a RAM of 16 Go. Our code
is developed in python 3.8 using Open3D, NumPy
and SciPy libraries. The data is acquired using frontal
the RGB camera and the ToF sensor (TrueDepth) of
an iPad Pro 11” 2nd generation.
Go-ICP is executed in python, using a cythonized
version of the original code of Yang et al. originally
coded in C++. Calculations were done on a Linux
Ubuntu computer with Intel® Core™ i5 -8365U CPU
@ 1.60GHz 1.90 GHz, with 8Go of RAM.
Table 2: Matching results for the model of pipeline with our
MCMH approach.
Matching
time (s)
Success
rate
(%)
RMSE
(mm)
Fitness
(%)
Scan 1
18.7 ±
1.1
90.5
0.83 ±
0.01
88.1 ±
0.8
Scan 2
16.5 ±
0.8
70
0.79 ±
0.03
87.4 ±
2.0
4.2 Systems Tested and Parameters
We performed our tests on two objects showed in
Figure 3: a lego and a pipeline system. The lego
object is approximately of 12 cm length, 7 cm width
and 4 cm height. The pipeline object is 30 cm length,
10 cm width and 8 cm height. The last object
represents well the inspection application since it is a
reflective and complex object, made of steel. The lego
is constraining by its size and sets the smallest object
we successfully tested with our approach.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
522

Table 3: Matching results for the pipeline and the lego models with Go-ICP. MSE Treshold is set to 0.00008. *Due to the
computation time for this scan, only one calculation was performed.
Lego
Time (s)
Success RMSE (mm) Fitness (%)
Scan 1 18.7 ± 0.3
FALSE 0.99 ± 0.01 48.7 ± 2.0
Scan 2 19.9 ± 0.4
TRUE 0.63 ± 0.01 95.3 ± 0.9
Pi
p
eline
Time (s)
Success RMSE (mm) Fitness (%)
Scan 1 20.8 ± 1.3
FALSE 0.994 ± 0.001 55.3 ± 0.6
Scan 2 3471*
FALSE 1.11* 23.1*
We now present the parameter used for the
reconstruction and the global scan matching. We first
begin with the MCMH parameters. Without any a
priori, we must evaluate a large range of translations
and rotations. So, we perform a large exploration in
the first iterations. This allows us to move far enough
from initial position. However, even if it helps to
escape local minima, empirical tests show the need to
restrain the range to access global minima.
Metropolis-Hastings criteria is set to 𝛽 700 ( s e e
equation (2)). MCMH procedure is computed over
10000 iterations. This allows enough sampling of the
phase space to find the best approximate solution.
If luminosity can change during acquisition, we
set the geometric parameter of ICP color 𝜆
1.0. Voxel sizes from the coarse grain to the fine one
are set to [0.01, 0.005, 0.002] for the lego model and
[0.02, 0.01, 0.002] for the pipeline system.
Adaptation of voxel size is needed for coarse to fine
grain approach, depending on the size of the
considered object.
We compare our method with Go-ICP. For this
method, the matching calculations are performed on
the complete point cloud of the scan and the model
without a support plan. We choose to proceed like this
since Go-ICP is combinatory and supposed to assure
a perfect matching. The tests with Go-ICP are
performed using the set of default parameters. Only
the shutoff parameter, here a mean square error
(MSE) threshold, is fixed empirically at 0.00008.
Higher values tested did not gave satisfying results on
all the tests. Lower values increase CPU time above
the hour.
4.3 Scan Matching Performances
We first present the matching results we got for two
different scans of the lego. These two scans are
complex cases due to the low point density on the
object point cloud. We evaluate four performance
criteria: the computation time, the success rate, the
RMSE and the fitness between the scan and the
reference model. Since MCMH is stochastic, we
evaluated 200 runs of our approach to quantify its
robustness. RMSE and fitness are evaluated only for
good results only. We define empirically that a good
match corresponds to a fitness greater than 80%.
Results for the lego are presented in Table 1. We
see our approach has an average success rate for the
matching between 65 and 70% on 200 calculations.
The time cost is about 13 seconds. We also saw
empirically that RMSE and fitness can be used to
evaluate the matching quality. A good matching has
a value over 80% for the fitness and lower than the
millimeter for the RMSE. The fitness is interesting
since it traduces the overlap between the model and
the scan, 100% means a perfect overlap.
We apply the same procedure to the pipeline
model. Results are presented in Table 2. The
computation time of the matching algorithm is 18
seconds. The success rate depends on the complexity
of the scan. For example, the first scan tested show a
rate success of 90.5% and the second, more complex,
70%.
For the Go-ICP method, since this approach is
deterministic, one calculation is enough to get value
for the four performances criteria previously
described. However, stochasticity is added due to our
scan preprocessing, so we evaluate the results on a set
of 20 calculations. The
Table 3 shows the results with
this approach. Go-ICP is supposed to give the best
matching without a priori, but for the two systems we
tested, only one scan matching gives the expected
results. The other tests were not retained since they
converge to wrong solution. Due to its deterministic
aspects, the only possibility to change results should
be to change MSE threshold or initial orientation of
the scans. However, modifying the MSE threshold
does not improve results and requires more time to
converge.
Our approach using MCMH shows interesting
results. We have a ratio of success superior to 80%
for most of the cases. However, difficult scan like
scan 2 of the pipeline has a success rate of 70%, due
to the quasi-symmetry of the object. Such
phenomenon can be explained by the initialization
A 3D Matching Method to Compare a Scan to Its Reference using 3D Registration and Monte Carlo Metropolis Hastings Optimization for
Industrial Inspection Applications
523

before the matching. In term of phase space, the scan
is positioned close to a saddle point. Due to this, in
term of probability, we favor in the first iteration one
side of the pipeline more than the other. In addition,
the barrier between the two regions of the pipeline
should be high. This implies that even with our
metropolis criteria, passing the barrier is difficult.
However, we treat a realistic industrial object, and we
can assure correct matching if we keep only the best
matching over the 200 tests. We already have leads to
get performance improvement like taking the initial
position and orientation of the scan into account
thanks to IMU information. For the lego, we see it is
a difficult case for matching. This is mainly due to the
size and the point density of the scan. It implies less
constrain compared to the pipeline and so, more local
minima.
In term of computational time, our method is
efficient. The complete matching algorithm took
between 10 and 20 seconds for all the tested case. Our
method is faster than Go-ICP. Half of the
computational time is due to the point cloud pre-
processing. For difficult cases, Go-ICP
computational time can explode (~ 1 hour).
Finally, concerning the fitness and the RMSE,
these two values are good performance criteria that
can be used to interpret the matching quality. For
most of the cases, a fitness value over 80% and with
a RMSE below the millimeter means we have a good
matching. In the case where Go-ICP shows good
results, the method has a lower RMSE value and
wider fitness value. Nevertheless, the adaptability
showed by our approach is interesting for inspection
application where objects are complex.
5 CONCLUSIONS
In this work, we proposed a MCMH approach
combined with ICP for the point cloud matching
problem. We showed encouraging results compared
to a state-of-the-art method called Go-ICP. Our
method includes a 3D reconstruction step using ICP
color generating 3D models to compare scans. The
method is efficient on small objects like the lego, and
seems adapted to realistic objects for inspection
problem like the pipeline system.
Our approach still suffers from some limitations,
especially in difficult cases where there is some
symmetry in the object of interest. The simplified
triangular mesh descriptor we used could be too
restrictive for such case, causing some trouble for
matching. Some improvement can be done by
changing the initial position of the scan for the
matching. Parallelization of MCMH can also
conserve efficient results while reducing the actual
computation time of less than 20 seconds, which can
let us consider a quasi-real-time application.
In the future, we plan to use this approach to
perform geometrical comparison between a scan and
its reference model, to highlight the presence of
defects using similarity criterion. Highlighted region
of interest will reveal the presence of defects like
missing pieces, extra pieces or misoriented pieces.
This method could then be used for detection of
foreign objects in aeronautical assembly lines or
missing pieces for maintenance for example. Further
tests on realistic industrial environment, with
different object sizes and complexity, are also
planned to validate the method usability. A last
improvement for this method could be to simulate a
video processing approach through the fusion of
several partial scans to inspect before comparing with
the 3D model. It could improve robustness by adding
more information and increasing artificially the
sensor precision.
REFERENCES
Abdallah, H. B., Orteu, J.-J., Jovancevic, I., & Dolives, B.
(2020). Three-dimensional point cloud analysis for
automatic inspection of complex aeronautical
mechanical assemblies. Journal of Electronic Imaging,
29(4), 041012.
Arun, K. S., Huang, T. S., & Blostein, S. D. (1987). Least-
Squares Fitting of Two 3-D Point Sets. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, PAMI-9(5), 698‑700.
Ben Abdallah, H., Jovančević, I., Orteu, J.-J., & Brèthes, L.
(2019). Automatic Inspection of Aeronautical
Mechanical Assemblies by Matching the 3D CAD
Model and Real 2D Images. Journal of Imaging, 5(10),
81.
Besl, P. J., & McKay, N. D. (1992). Method for registration
of 3-D shapes (P. S. Schenker, Éd.; p. 586‑606).
Bethencourt, A., & Jaulin, L. (2013). 3D Reconstruction
Using Interval Methods on the Kinect Device Coupled
with an IMU. International Journal of Advanced
Robotic Systems, 10(2), 93.
Bhadrakom, B. (2016). As-built 3D modeling based on
structure from motion for deformation assessment of
historical buildings. International Journal of Geomate.
Chen, W., Li, Y., & Li, C. (2020). A Visual Detection
Method for Foreign Objects in Power Lines Based on
Mask R-CNN. International Journal of Ambient
Computing and Intelligence (IJACI), 11(1), 34‑47.
Chen, Y., & Medioni, G. (1992). Object modelling by
registration of multiple range images. Image and Vision
Computing, 10(3), 145‑155.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
524

Ester, M., Kriegel, H.-P., & Xu, X. (1996). A Density-
Based Algorithm for Discovering Clusters in Large
Spatial Databases with Noise. Kdd, 96(34), 226‑231.
Hastings, W. K. (1970). Monte Carlo sampling methods
using Markov chains and their applications.
Biometrika, 57(1), 97‑109.
Kazhdan, M., Bolitho, M., & Hoppe, H. (2006). Poisson
surface reconstruction. Proceedings of the fourth
Eurographics symposium on Geometry processing,
61‑70.
Kopernicky, M., Kovacovský, M. T., & Gargalık, R.
(2013). 3D Scene Reconstruction Using Partial
RGB+Depth Maps. 6.
Kuhn, H. W. (1955). The Hungarian method for the
assignment problem. Naval Research Logistics
Quarterly, 2(1‑2), 83‑97.
Lamine Tazir, M., Gokhool, T., Checchin, P., Malaterre, L.,
& Trassoudaine, L. (2018). CICP : Cluster Iterative
Closest Point for sparse–dense point cloud registration.
Robotics and Autonomous Systems, 108, 66‑86.
Land, A. H., & Doig, A. G. (2010). An Automatic Method
for Solving Discrete Programming Problems. In M.
Jünger, T. M. Liebling, D. Naddef, G. L. Nemhauser,
W. R. Pulleyblank, G. Reinelt, G. Rinaldi, & L. A.
Wolsey (Éds.), 50 Years of Integer Programming 1958-
2008 : From the Early Years to the State-of-the-Art (p.
105‑132). Springer.
Linh, T. N., & Hiroshi, H. (2015). Global Iterative Closet
Point Using Nested Annealing for Initialization.
Procedia Computer Science, 60, 381‑390.
Nguyen, T.-N., Huynh, H.-H., & Meunier, J. (2018). 3D
Reconstruction With Time-of-Flight Depth Camera and
Multiple Mirrors. IEEE Access, 6, 38106‑38114.
Park, J., Zhou, Q.-Y., & Koltun, V. (2017). Colored Point
Cloud Registration Revisited. 2017 IEEE International
Conference on Computer Vision (ICCV), 143‑152.
Pomerleau, F., Colas, F., & Siegwart, R. (2015). A Review
of Point Cloud Registration Algorithms for Mobile
Robotics. Foundations and Trends in Robotics, 4(1),
1‑104.
Rusu, R. B., Blodow, N., & Beetz, M. (2009). Fast Point
Feature Histograms (FPFH) for 3D registration. 2009
IEEE International Conference on Robotics and
Automation, 3212‑3217.
Saavedra, D., Banerjee, S., & Mery, D. (2021). Detection
of threat objects in baggage inspection with X-ray
images using deep learning. Neural Computing and
Applications, 33(13), 7803‑7819.
Sungjoon Choi, Zhou, Q.-Y., & Koltun, V. (2015). Robust
reconstruction of indoor scenes. 2015 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
5556‑5565.
Tsin, Y., & Kanade, T. (2004). A Correlation-Based
Approach to Robust Point Set Registration. In T. Pajdla
& J. Matas (Éds.), Computer Vision—ECCV 2004 (Vol.
3023, p. 558‑569). Springer Berlin Heidelberg.
van Laarhoven, P. J. M., & Aarts, E. H. L. (1987).
Simulated annealing. In P. J. M. van Laarhoven & E. H.
L. Aarts (Éds.), Simulated Annealing : Theory and
Applications (p. 7‑15). Springer Netherlands.
Wang, F., & Zhao, Z. (2017). A survey of iterative closest
point algorithm. 2017 Chinese Automation Congress
(CAC), 4395‑4399.
Yang, J., Li, H., Campbell, D., & Jia, Y. (2016). Go-ICP :
A Globally Optimal Solution to 3D ICP Point-Set
Registration. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 38(11), 2241‑2254.
Zhang, H., Wei, Q., & Jiang, Z. (2017). 3D Reconstruction
of Space Objects from Multi-Views by a Visible
Sensor. Sensors, 17(7), 1689.
Zhou, Q.-Y., Park, J., & Koltun, V. (2016). Fast Global
Registration. In B. Leibe, J. Matas, N. Sebe, & M.
Welling (Éds.), Computer Vision – ECCV 2016 (p.
766‑782). Springer International Publishing.
A 3D Matching Method to Compare a Scan to Its Reference using 3D Registration and Monte Carlo Metropolis Hastings Optimization for
Industrial Inspection Applications
525
