
LCPP: Low Computational Processing Pipeline for Delivery Robots
Soofiyan Atar
1 a
, Simranjeet Singh
1 b
, Srijan Agrawal
4 c
, Ravikumar Chaurasia
3 d
,
Shreyas Sule
5
, Sravya Gadamsetty
2
, Aditya Panwar
1
, Amit Kumar
1
and Kavi Arya
1 e
1
Indian Institute of Technology Bombay, Mumbai, India
2
Indian Institute of Technology Bhubaneswar, Bhubaneswar, India
3
University of Mumbai, Mumbai, India
4
Shri G. S. Institute of Technology and Science, Indore, India
5
D Y Patil’s Ramrao Adik Institute of Technology, Mumbai, India
Keywords:
Delivery Robot, Semantic Segmentation, Object Detection.
Abstract:
Perception techniques in novel times have enormously improved in autonomously and accurately predicting
the ultimate states of the delivery robots. The precision and accuracy in recent research lead to high compu-
tation costs for autonomous locomotion and expensive sensors and server dependency. Low computational
algorithms for delivery robots are more viable as compared to pipelines used in autonomous vehicles or pre-
vailing delivery robots. A blend of different autonomy approaches, including semantic segmentation, obstacle
detection, obstacle tracking, and high fidelity maps, is presented in our work. Moreover, LCPP comprises
low computational algorithms feasible on embedded devices with algorithms running more efficiently and
accurately. Research also analyzes state-of-the-art algorithms via practical applications. Low computational
algorithms have a downside of accuracy, which is not as proportional as computation. Finally, the study
proposes that this algorithm will be more realizable as compared to Level 5 autonomy for delivery robots.
1 INTRODUCTION
The Autonomous Delivery Robot (ADR) is evolving
rapidly in terms of scalability and efficiency. ADR
shows compelling advantages over a standard deliv-
ery system, such as low delivery cost, faster service
and higher accuracy than a human. Though ADRs do
not have high adoption, they operate well, considering
their advantages over other methods. The ADR busi-
ness is booming in this coronavirus outbreak, which
promises contact-less delivery, a mandate in this pan-
demic. Before the pandemic, ADRs were underused
in airports, university campuses, hotels, hospitals, and
large corporate campuses. After the pandemic, de-
mand for ADR has increased exponentially as these
do not mimic human behaviour, which prevents the
spreading of novel coronavirus. ADR market in the
USA is valued at 0.35 million USD in 2020, and af-
ter half a decade, it is expected to reach 3.82 million
USD (Intelligence, 2020).
a
https://orcid.org/0000-0002-0878-9347
b
https://orcid.org/0000-0002-8297-1470
c
https://orcid.org/0000-0002-5080-4184
d
https://orcid.org/0000-0002-1917-8146
e
https://orcid.org/0000-0002-7601-317X
ADR uses different perception pipelines as com-
pared to outdoor vehicles, including truck delivery
robots (Marshall, 2017). The complexity increases
in terms of dynamic planning, but on the other side,
low driving speed decreases the requirement of com-
putational power (Lamon et al., 2006). The pipeline
used in autonomous vehicles cannot be used in ADR
because the environment, momentum and path taken
are different. ADR requires precise tuning to navi-
gate itself in the crowded street. ADRs are mostly
knee-height robots, and they usually navigate in so-
phisticated areas giving priority to safety (K
¨
ummerle
et al., 2013). Nowadays, ADRs requires very com-
plex sensory equipment, which increases the over-
all complexity and requirement of high computation
power. Most of the current autonomous robots con-
sist of sensors covering the 2D plane of the environ-
ment for navigation, reducing complexity (Ren et al.,
2019). Still, only 2D information of the domain is
not enough for navigating in cluttered areas. ADRs
need an exact perception stack for navigating in clut-
tered conditions. Complex perception involves dif-
ferent approaches using depth cameras, stereo cam-
eras, 360-degree cameras, 3D lidar and a combina-
tion of many cameras. Perception pipeline in cur-
rent state-of-the-art robots use 3D point cloud data
130
Atar, S., Singh, S., Agrawal, S., Chaurasia, R., Sule, S., Gadamsetty, S., Panwar, A., Kumar, A. and Arya, K.
LCPP: Low Computational Processing Pipeline for Delivery Robots.
DOI: 10.5220/0010786300003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 130-138
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

or server-based High Fidelity Maps (HFM) (Brown-
ing et al., 2012; Chipka and Campbell, 2018) ap-
proach with complicated architecture for navigation
pipeline. The perception pipeline of ADR consists
of road/sidewalk segmentation, obstacle/pedestrian
avoidance and tracking, and HFM for localization.
The problem with these methods is that they are
highly computationally expensive concerning the em-
bedded device used in ADR. Modern techniques use
the fusion of the Global Positioning System (GPS)
and HFM. The issue with GPS is that signal recep-
tion gets weakened near buildings (Kos et al., 2010),
which causes problems in navigation. HFM being
more accurate and precise gives better localization re-
sults, but the current implementation requires server-
based computation (Vitali et al., 2019), as HFM can-
not be used for onboard processing. This research
provides an asynchronous HFM technique for local-
ization with low computation, ignoring less essential
features, and prioritizing powerful spatial global fea-
tures, thus reducing the algorithm’s complexity.
Semantic segmentation is a vital segment for lo-
cal planning of the ADR (Qiu et al., 2019; Lin et al.,
2017; Hong et al., 2018; Cheng et al., 2019). Se-
mantic segmentation gives in-depth information about
the environment and provides accurate localization of
objects in the sensor frame. However, state-of-the-
art semantic segmentation algorithms for autonomous
vehicles are computationally heavy. Current systems
heavily depend on point cloud data for segmenta-
tion, which suffers from near-field blind spots (Ghaf-
farzadeh, 2019), resulting in low precision. Using
point cloud data also increases computational pro-
cessing, or server dependency (Wang et al., 2021).
Semantic segmentation datasets such as Cityscape
(Cordts et al., 2015), or Camvid (Brostow et al., 2009)
do not provide accurate data for delivery robots; they
do not include rough patches of the road. To solve this
issue, we created a custom dataset for pedestrian level
height camera feed. LCPP uses semantic segmenta-
tion only for traversing. Combining object detection
for obstacles along with semantic segmentation re-
duces computation cost. Object tracking is necessary
for tracking and anticipating the movement of various
moving objects in the view. Tracking obstacles for fu-
ture path prediction is also a processing-intensive task
that enables more safety in robot’s path planning. Ev-
ery algorithm focuses on low computational process-
ing in this research, which reduces server dependency
and high processing power requirements.
LCPP focuses on a low computational perception
pipeline that enables onboard computing, viable in
communication prone areas and GPS denied areas.
The major contribution of the paper is:
• Implementation of less computation expensive
road segmentation techniques for efficient sensing
• Implementation of object detection and tracking
algorithm for ADR.
• Efficient implementation of HFM for amend-
ments of robot localization.
This research modifies perception stacks used in state-
of-the-art delivery robots with increased efficiency
and safety. The decrease in computational processing
power also minimizes the cost of the sensors stack.
The rest of the paper is structured as follows. Sec-
tion 2 reviews the existing and related work on per-
ception techniques in ADR. Section 3 focuses on the
implementation of the proposed perception pipeline
for ADR. Finally, Section 4 provides the conclusion
and outlook of this work in brief.
2 RELATED WORK
LCPP is related to an autonomous mobile robot run-
ning in outdoor environments. In outdoor environ-
ments, delivery robots need to run on sidewalks be-
cause of their size and payload capacity. Delivery
trucks (Lee et al., 2013) is used for a higher payload
capacity, and their challenges, complexity, safety re-
quirements and processing power are the same as au-
tonomous vehicles. Unlike indoor autonomous de-
livery robots, our implementation does not require
mapping (Pereira et al., 2006) the environment, as
we use GPS mission planning using Google maps to
find global paths. Previous research (Yahja et al.,
2000) plans the trajectory in outdoor terrain without
mapping the environment. Our approach focuses on
low computational processing (Miller and Gat, 1991)
for outdoor navigation in GPS denied areas without
server communication.
Semantic segmentation takes up a lot of com-
putational processing as it assigns labels pixel-wise.
In the past, many researchers have implemented se-
mantic segmentation for outdoor navigation (Hong
et al., 2018; Cheng et al., 2019), that are not suitable
for embedded devices. There are other implementa-
tions based on 3D point cloud (Qi et al., 2017; Bal-
ado Frias et al., 2019), which are even more computa-
tionally expensive compared to 2D image segmenta-
tion. Considering standard deep neural networks for
semantic segmentation AlexNet (Krizhevsky et al.,
2017),VGG-16 (Simonyan and Zisserman, 2015),
GoogleNet (Szegedy et al., 2014), ResNet (He et al.,
2015) are mostly used for road segmentation in out-
door navigation. These standard networks consist of
LCPP: Low Computational Processing Pipeline for Delivery Robots
131

Figure 1: Pipeline for low computational perception.
Trained road segmentation and object detection models are
used to process the input. The EHFM pipeline would then
utilize the combined data to perform global robot precision.
Object detection data is used to track objects in the view,
which is used for motion planning.
fewer layers for low computation, but the accuracy
decreases considerably.
Amongst all these algorithms, ResNet gives the
most accurate results, but it contains 156 layers of
the deep neural network, which results in high com-
putation. Combining semantic segmentation and ob-
ject detection (known as multi-task learning (Craw-
shaw, 2020) decreases computational requirements
(Wang et al., 2007). Object detection is used to de-
tect obstacles such as pedestrians, potholes, trees, and
many more (Uc¸ar et al., 2017a; Uc¸ar et al., 2017b).
Object detection algorithms are lighter than seman-
tic segmentation; thus, they reduce the computational
cost by reducing classes used in semantic segmen-
tation. SimpleNet (Lewis, 2016) has an acceptable
accuracy with real-time detection, Fast RCNN (Ren
et al., 2016) does not provide real-time performance
but gives high accuracy, YOLO (Redmon et al., 2016)
is a balanced performer in terms of accuracy and com-
putation. Obstacles after detection are used for track-
ing to predict future paths for traversing. Multi-object
tracking (Luo et al., 2017) for mobile obstacles is used
during path planning.
Our approach is similar to the tracking-by-
detection approach. The majority of the batch
methods (Berclaz et al., 2011; Pirsiavash et al.,
2011) use graph-based representation for a global
optimizer. Various trackers such as centroid
tracker(Nascimento et al., 1999), Intersection Over
Union (IOU) tracker(Bochinski et al., 2017), and
Kalman tracker(Gunjal et al., 2018) are computation-
ally inexpensive for mobile objects used for motion
planning.
HFM (Browning et al., 2012; Chipka and Camp-
bell, 2018) is useful in GPS denied areas such as near
apartments or in groves of trees where the GPS gives
inaccurate readings or no readings. HFM helps cor-
rect the world coordinate of the ADR with higher ac-
curacy than GPS. HFM is nowadays used with GPS
using fusion algorithms for more accurate and precise
localization. Implementation of HFM using low com-
putational processing is still under research. LCPP
uses Efficient High Fidelity Maps (EHFM) for local-
izing and is also used in robot kidnap problems (Yi
and Choi, 2011), where the robot spawns randomly.
3 IMPLEMENTATION
Road segmentation, object detection, object tracking,
and EHFM are all part of LCPP. Figure 1 describes
the efficient synchronous pipeline, where the anno-
tated data for road segmentation and object detection
is used to train the semantic segmentation model (ES-
PNetV2) and object detection model (YoloV5(s)), re-
spectively. The trained semantic segmentation and
object detection models are combined and used for
the motion planning module. The integrated model
is used in conjunction with object tracking, which is
used to track mobile objects such as cars, bicycles,
and other vehicles. The segmentation and object de-
tection results are further used to perform feature ex-
traction. The extracted features are taken as an input
for the EHFM algorithm to get the global position of
the ADR. Oriented FAST and Rotated BRIEF (ORB)
(Rublee et al., 2011) descriptors which use Accel-
erated Segment Test (FAST) keypoints and Binary
Robust Independent Elementary Features (BRIEF).
ORB descriptors are used to extract distinct 3D point
features, and we built a low-resolution map combin-
ing all these features.
3.1 Custom Dataset
We have created a custom dataset to train and test
semantic segmentation algorithms in the designed
pipeline. This dataset is also available on the Kaggle
(Dataset link). The dataset comprises various scenes
from the campus of IIT Bombay with knee height-
ened scenes. It consists of 4000+ annotated images
created by us for road segmentation and 12600+ an-
notated images for object detection, a mixture of col-
lected datasets from Kaggle (Patel, 2019), and COCO
2017 train dataset (Veit et al., 2016). The remaining
images are added from our custom dataset.
The dataset made for road segmentation consists
of five classes: road, shallow, footpath, pothole and
background. The image portion containing regions
that can be traversed at average speed by the ADR are
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
132

(a) (b) (c)
Figure 2: Sample Scene from IIT-Bombay campus for Image Semantic Segmentation, Scene 1 (a) is the set of sample images,
Scene 2 (b) is output using MobileNetV3 on sample images, and Scene3 (c) is the output of ESPNetv2 on sample images. In
segmentation predicted mask, red color represents road; green color represents shallow paths; violet color represents footpath
and cyan color represents the background respectively.
marked as road. The image portions where the ADR
has to travel at a slower pace are marked as shallow.
The regions marked as footpaths are the sides of the
road that cannot be traversed (in the Indian environ-
ment, the ramps for the footpath are not adequately
set up, which might lead to an abrupt end during the
ADR’s movement). Regions on the road that are not
traversable are categorised as potholes. Similarly, we
have limited categories for object detection as well.
Table 1: Road segmentation models comparison.
Model Name MobileNetV3 small ESPNetsV2
Parameter 2.5M 0.79M
FPS* 21 31
mIOU on Cityscape dataset 68 66.7
mIOU on IITB dataset 62 68.2
*on GTX 1050 (Mobile) (GPU Geekbench link).
3.2 Road Segmentation
Road segmentation means to segment visual in-
put from the camera into different categories like
road, footpath, pothole, and background in real-
time. Cars, humans, trees and such objects were
Table 2: Object detection models comparison.
Model Name mAP FPS
RetinaNet 33.5 10
ENet 48.3 16
YoloV5(s) 55.60 33
Figure 3: Object detection on custom dataset. The col-
ored bounding boxes represent different classes of objects
detected by the model in the image.
not included in segmentation because the object de-
tection model handled them. The navigation sys-
tem uses these insights to traverse on-road and avoid
non-traversable paths (potholes, footpaths). Some
State-of-the-art segmentation models that were con-
sidered are DeeplabV3(Chen et al., 2018), Mo-
bileNetV3(Howard et al., 2019), ENet(Paszke et al.,
2016) and ESPNetV2(Mehta et al., 2019). The
Deeplab model was not real-time (low FPS), hence
rejected even though it had the highest accuracy. The
ENet model did not perform well on the Cityscape
dataset and had mean Intersection Of Union (mIOU)
of only 0.18. The remaining two models were trained
and compared as shown in Table 1. The results of
MoblileNetV3 and ESPNetV2 are shown in Figure 2b
and Figure 2c respectively. From Table 1 it can be
LCPP: Low Computational Processing Pipeline for Delivery Robots
133

concluded that the ESPNetV2 model performs best on
the given dataset in terms of both high accuracy and
low computation as compared to MobileNetV3 small.
3.3 Object Detection and Tracking
Object detection model is essential for avoiding ob-
stacles. RetinaNet(Lin et al., 2018), EfficientNet
(ENet)(Tan and Le, 2020), and YoloV5(s)(Jocher
et al., 2021) were the models tested. The accuracy and
performance of YoloV5(s) was satisfactory as com-
pared to other models on custom dataset as shown in
Table 2.
YoloV5(s) was trained on a custom dataset for 50
epochs. Table 2 shows that YoloV5(s) outperformed
all other architectures by a wide margin. As the table
shows, mean Average Precision (mAP) of YoloV5(s)
is 14% higher than that of ENet, and FPS is 100%
higher than ENet. The output of YoloV5(s) is shown
in Figure 3 which detects obstacles, vehicles, potholes
and many more objects with 55.6 mAP. For object
tracking, centroid tracker, IOU tracker and Kalman
tracker were considered. The centroid tracker and
Kalman tracker had a lot of false detections. Centroid
and Kalman filter tracking gave FPS of 44, and IOU
tracking provided FPS of 46. The IOU tracker out-
performed the Kalman and centroid trackers in terms
of efficiency, thus tracking objects such as bicycles,
humans, cars, and other dynamic objects.
By avoiding the tracking of static objects such as
trees and potholes, the computation is further reduced.
The outcome of object tracking is shown in Figure 4
where the tracking is obtained with the relative mo-
tion of the objects. For example, cars, persons and bi-
cycles are tracked, and their trailing path is displayed
in Figure 4. YoloV5(s) and IOU tracker are the best
for the delivery application as they perfectly balance
precision and efficiency.
Figure 4: Mobile objects are tracked in subsequent images.
The colored lines represent various positions of the object
being tracked.
3.4 EHFM
Regular HFM is computationally expensive, so it has
to run on high-end servers with constant connectiv-
ity (Chipka and Campbell, 2018)(Vitali et al., 2019).
LCPP uses different techniques to reduce the com-
plexity and to increase the efficiency of HFM. Algo-
rithm 1 explains the method applied to obtain global
coordinate used in LCPP.
Algorithm 1: EHFM algorithm for efficient global localiza-
tion.
Input: RGB-D Image
Output: Global coordinate of ADR
Data: Low-resolution map
1 Apply semantic segmentation model
2 Extract ratios of the road to background and
footpath to background
3 Match the segmentation ratio of the input
image with the low-resolution map
4 Detect static objects from the image using
object detection model
5 for every static object in the frame do
6 if object is in list of stored static objects
then
7 calculate distance from static object
using Equation (1) and Equation (2)
8 Take average of all global coordinates obtain
from static objects to calculate g1
9 Extract set of key-point features from input
image using ORB
10 Match every feature from the set of
low-resolution feature maps
11 Select strong correspondences from these
matches
12 for all strong correspondences matched
features do
13 Calculate point depth and apply Equation
(1) and Equation (2) to get the exact
location of the ADR
14 Take average of all the matched points
and calculate g2
15 Apply weighted average on g1 and g2 to
obtain the global coordinate of the ADR
3.4.1 Low Resolution Maps
For building low-resolution maps, LCPP uses four
depth cameras, each facing in different principal di-
rections. To reduce computation, while testing, a sin-
gle depth camera is used and then features obtained
from it are used to match features from the pre-built
maps. These maps consist of all features (segmenta-
tion ratios, static objects and key points) from all four
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
134
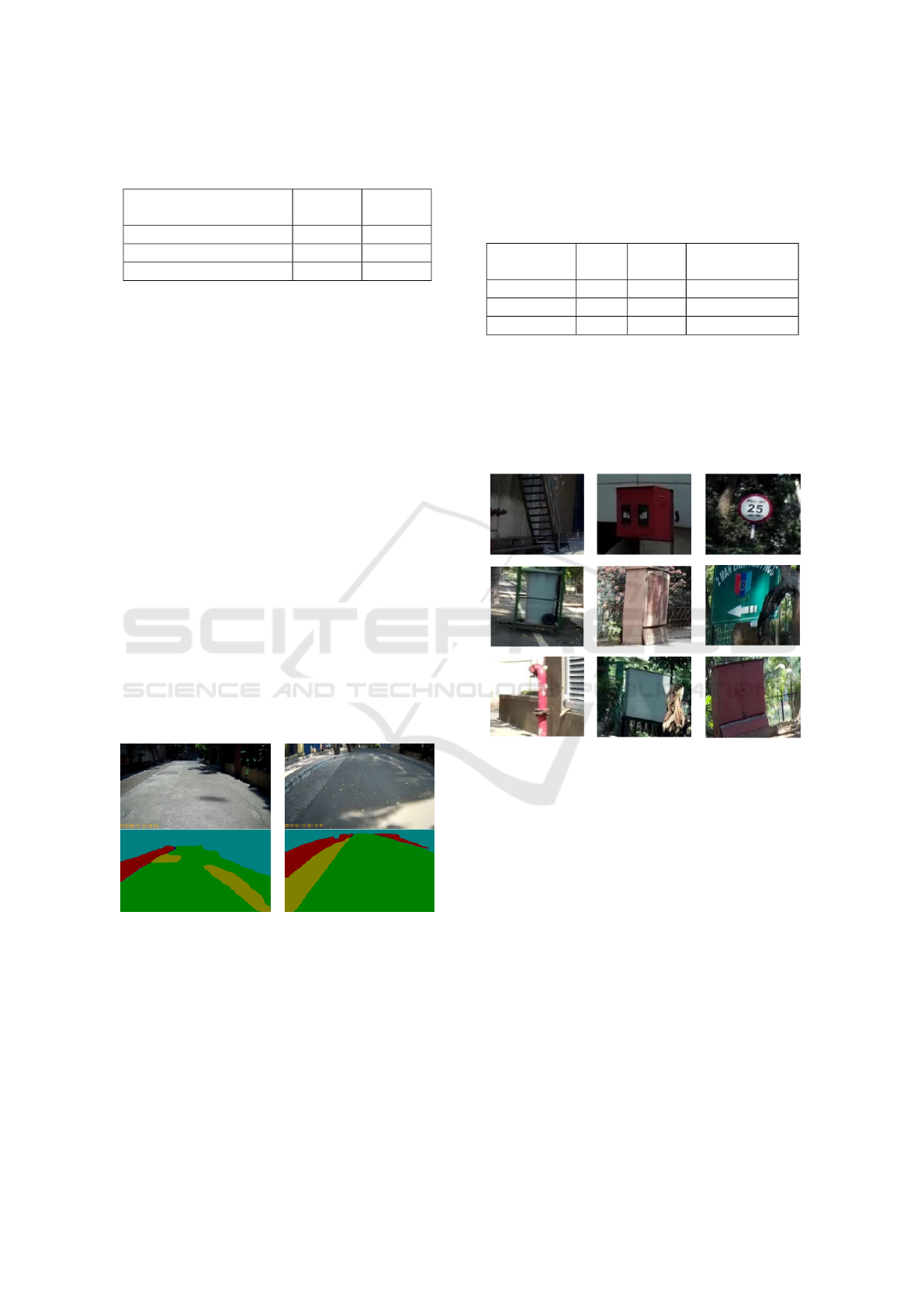
Table 3: Comparing segmentation pixel ratio of 2 scenes for
uniqueness, up-to five decimal. Refer Figure 5
Segmentation Pixel
Count Ratios
Scene 1 Scene 2
Road to Background 1.73711 5.29886
Footpath to Background 0.15859 0.68700
Shallow to Background 0.27880 0.98892
images. These features were stored with a 1 Hz fre-
quency. Also, the world coordinate of the camera’s
centre is saved along with the 3D information of all
the features.
3.4.2 Filtering and Slicing Relevant Features
Orientation of the camera is used to get the relevant
image by slicing the four principal direction images
extracted from the map. From Figure 7, the image is
formed in a 50:50 ratio by slicing half from the first
image (0
◦
) and a half from the second image (-90
◦
)
marked by black boundary. FOV of camera was set
at 90
◦
. As shown in Figure 7, the sliced image is
confined to match the features from a section of the
pre-built map. Similarly, a maximum of two images
from the four images are processed in the pipeline for
all the orientations, making the process data-efficient
and reducing processing per cycle.
3.4.3 Segmentation Pixel Ratios
Every image/scene has a unique segmentation ratio of
road to background and footpath to the background,
which is used as a global feature, as shown in Table 3.
(a) (b)
Figure 5: Sample Scene from IIT-Bombay campus, Scene
1 (a) and Scene 2 (b). In segmentation mask (lower half)
green, yellow, red and cyan are road, shallow, footpath and
background respectively.
The segmented mask of all four principal direction
images is stored as features in the pre-built map. The
segmentation pixel ratio for any orientation of all the
stored masks is obtained using the sliced image. Al-
ternatively, it can also store the segmentation ratio of
every 10
◦
for four principal direction views, lowering
the searching computation.
Table 4: Comparison of ORB, SURF, SIFT feature extractor
algorithms on sample images.
Algorithms
Time
(sec)
Match
(%)
Descriptor size
(Bytes)
ORB 0.03 64 32
SURF 0.63 69 64
SIFT 0.51 72 128
3.4.4 Static Objects Feature
Static objects such as signboards, fire-hydrants, road-
side milestones, and many (Figure 6) are some of
the helpful roadside features and significant markers.
With the list of static objects from object detection,
Figure 6: Some of the common static object by the side of
IIT-Bombay road.
as shown in Algorithm 1, it first identifies the object
from the stored static object feature using template
matching (opencv dev team, 2021) by ORB descrip-
tor (Rublee et al., 2011).
3.4.5 Efficient Key-point Features
ORB descriptors (Rublee et al., 2011; Tareen and
Saleem, 2018) performs best for outdoor scenarios,
while SIFT(Lindeberg, 2012) works well for indoor
scenarios because of the graffiti-type images. Be-
sides improving the detection speed, it can also detect
moving targets accurately in real-time. The sample
dataset was tested with all of the feature extractors,
and ORB was the fastest and yielded a fairly good
match (Ref. Table 4).
As shown in Figure 7, feature matching of a scene
(train image from upper right section) with another
LCPP: Low Computational Processing Pipeline for Delivery Robots
135

Figure 7: Sample feature matching with four principal direction view.
scene from live data (test image from lower left sec-
tion), confined to the sliced image from the four prin-
cipal direction view. Instead of matching the live
data with individual stored images, LCPP matches it
with the stored key points. The feature key points are
stored along with its descriptors and space coordinate
using ORB descriptor; this decreases the data to store
and the onboard process. To reduce the computational
load further, as shown in Algorithm 1, LCPP uses
only those descriptors with solid correspondences be-
tween the feature key points from the map and the
sliced image. Running it at 0.5 Hz yields a fair, ac-
curate prediction of ground truth. Intrinsic data of the
3D camera (cx, cy, fx, fy) is obtained by calibrating
the camera. The 3D coordinate of a given pixel is cal-
culated using the Equation 1 and 2 (opencv dev team,
2014):
x =
(u − cx)
f x
, y =
(v − cy)
f y
, norm =
p
x
2
+ y
2
+ 1
(1)
(x, y, z) = (
x
norm
,
y
norm
,
1.0
norm
) (2)
where, (cx, cy) is the centre of curvature; (fx, fy) are
the focal lengths; (u, v) is the pixel coordinate of 2D
image. The rotation matrix of the camera’s origin
transforms the calculated feature coordinates to the
world frame. This method reduces the error caused by
the vibration or noise established from the depth cam-
era. The predicted location was produced using the
vector subtraction method by subtracting the world
coordinates of the recorded features at the origin and
the world coordinates of the same features with re-
spect to the camera frame. Further, efficient key
point matching eliminates all the nonessential loads,
making EHFM run more effectively and efficiently
than standard HFM. This method was tested on IIT-
Bombay’s road using a ZED2 camera with road seg-
mentation and object detection running for approxi-
mately 120 meters of distance.
The execution cycle was set at 0.25 Hz, and the
average controlled speed was approx. 2 m/s, i.e., after
every 8 meters. In Figure 8, ground truth is marked in
Figure 8: EHFM result on IIT-Bombay campus.
green, prediction is marked in red, and Odom’s read-
ing is marked in blue. Position A in Figure 8 repre-
sents the straight path; here, EHFM prediction is close
to the ground truth. Position B in Figure 8 represents
the curve path, here the challenge was the rapid mov-
ing of frames and less number of static objects, which
caused a slightly higher error in the EHFM predic-
tion, but with the following prediction, it gets much
accurate as shown in Figure 9. After 120 meters,
the Odom was deflected by 8 meters from the ground
truth. However, the EHFM errors were consistently
below 2.4 meters.
4 CONCLUSION
LCPP is a highly optimized perception pipeline for
outdoor navigation developed for delivery robots. All
perception techniques, which comprises most of the
computation for delivery robots, including road seg-
mentation, EHFM and object tracking, are realized
for onboard computation, which is a requirement
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
136

Figure 9: EHFM error vs Odom error.
for autonomy and eliminating server dependencies.
LCPP consist of a balance of efficient and precise
road segmentation algorithms. ESPNetV2 provided
mIOU of 68.2, and YoloV5(s) provided mAP of 55.6
for the custom dataset, indicating that precision was
high and can be increased using a more computational
heavy backbone for these algorithms. The outcome
of EHFM is demonstrated, which runs efficiently and
performs better than odometry sensor values using
low-resolution pre-built maps. The error of actual lo-
cation and the coordinates provided through EHFM
gave a maximum of 2% error for 120m trajectories.
LCPP has been implemented on Jetson Xavier AGX,
with all algorithms running parallel.
In future work, LCPP will consist of more efficient
dynamic algorithms and implement them on a Graph-
ics Processing Unit (GPU) or Field Programmable
Gate Array (FPGA). In addition, LCPP will also be
implemented in a more active and cluttered environ-
ment to demonstrate highly efficient and effective be-
haviour.
ACKNOWLEDGEMENTS
This work was supported in part by Ministry of Ed-
ucation (MoE), Govt. of India in the project e-
Yantra (RD/0113-MHRD001-021). We acknowledge
the support of e-Yantra staff especially Rathin Biswas
for reviewing the paper.
REFERENCES
Balado Frias, J., Mart
´
ınez-S
´
anchez, J., Arias, P., and Novo,
A. (2019). Road environment semantic segmentation
with deep learning from mls point cloud data. Sensors,
19:3466.
Berclaz, J., Fleuret, F., Turetken, E., and Fua, P. (2011).
Multiple object tracking using k-shortest paths opti-
mization. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 33(9):1806–1819.
Bochinski, E., Eiselein, V., and Sikora, T. (2017). High-
speed tracking-by-detection without using image in-
formation. In 2017 14th IEEE (AVSS), pages 1–6.
Brostow, G. J., Fauqueur, J., and et al. (2009). Semantic
object classes in video: A high-definition ground truth
database. Pattern Recognition Letters, 30(2):88–97.
Browning, B., Deschaud, J.-E., Prasser, D., and Rander,
P. (2012). 3d mapping for high-fidelity unmanned
ground vehicle lidar simulation. The International
Journal of Robotics Research, 31:1349–1376.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In ECCV.
Cheng, G., Zheng, J. Y., and Kilicarslan, M. (2019). Seman-
tic segmentation of road profiles for efficient sensing
in autonomous driving. In 2019 IEEE Intelligent Ve-
hicles Symposium (IV), pages 564–569.
Chipka, J. and Campbell, M. (2018). Autonomous urban
localization and navigation with limited information.
Cordts, M., Omran, M., and et al. (2015). The cityscapes
dataset. In CVPR Workshop on the Future of Datasets
in Vision, volume 2.
Crawshaw, M. (2020). Multi-task learning with deep neural
networks: A survey.
Ghaffarzadeh, D. K. (2019). Dtechex research: Sidewalk
last mile delivery robots: A billion-dollar-market by
2030. .
Gunjal, P. R., Gunjal, B. R., Shinde, H. A., Vanam, S. M.,
and Aher, S. S. (2018). Moving object tracking using
kalman filter. In 2018 ICACCT, pages 544–547.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition.
Hong, Z.-W., Yu-Ming, C., and et al. (2018). Virtual-to-real:
Learning to control in visual semantic segmentation.
Howard, A., Sandler, M., Chu, G., Chen, L.-C., Chen, B.,
Tan, M., Wang, W., Zhu, Y., Pang, R., Vasudevan, V.,
et al. (2019). Searching for mobilenetv3. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 1314–1324.
Intelligence, M. (2020). Autonomous delivery
robots market - growth, trends, covid-19 im-
pact, and forecasts (2021 - 2026). https:
//www.mordorintelligence.com/industry-reports/
autonomous-delivery-robots-market/.
Jocher, G., Stoken, A., and et al. (2021). ultralytics/yolov5:
v5.0 - YOLOv5-P6 1280 models, AWS, Supervise.ly
and YouTube integrations.
Kos, T., Markezic, I., and Pokrajcic, J. (2010). Effects of
multipath reception on gps positioning performance.
pages 399 – 402.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
agenet classification with deep convolutional neural
networks. Commun. ACM, 60(6):84–90.
K
¨
ummerle, R., Ruhnke, M., Steder, B., Stachniss, C., and
Burgard, W. (2013). A navigation system for robots
LCPP: Low Computational Processing Pipeline for Delivery Robots
137

operating in crowded urban environments. In 2013
IEEE ICRA, pages 3225–3232. IEEE.
Lamon, P., Kolski, S., and Siegwart, R. (2006). The
smartter-a vehicle for fully autonomous navigation
and mapping in outdoor environments. In Proceed-
ings of CLAWAR.
Lee, D.-Y. D.-Y., Thomas, V., and Brown, M. (2013). Elec-
tric urban delivery trucks: Energy use, greenhouse gas
emissions, and cost-effectiveness. Environmental sci-
ence & technology, 47.
Lewis (2016). Object detection for autonomous vehicles
gene.
Lin, J., Wang, W.-J., Huang, S.-K., and Chen, H.-C. (2017).
Learning based semantic segmentation for robot nav-
igation in outdoor environment. In 2017 Joint 17th
World Congress of IFSA and 9th SCIS (IFSA-SCIS),
pages 1–5.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2018). Focal loss for dense object detection.
Lindeberg, T. (2012). Scale Invariant Feature Transform.
Scholarpedia, 7(5):10491. revision #153939.
Luo, W., Xing, J., Milan, A., Zhang, X., Liu, W., Zhao, X.,
and Kim, T.-K. (2017). Multiple object tracking: A
literature review.
Marshall, A. (2017). The us postal service is building a
self-driving mail truck. https://www.wired.com/story/
postal-service-office-self-driving-mail-trucks/.
Mehta, S., Rastegari, M., Shapiro, L., and Hajishirzi, H.
(2019). Espnetv2: A light-weight, power efficient,
and general purpose convolutional neural network. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 9190–
9200.
Miller, D. P. and Gat, E. (1991). Exploiting known topolo-
gies to navigate with low-computation sensing. In
Sensor Fusion III: 3D Perception and Recognition,
volume 1383, pages 425–435. International Society
for Optics and Photonics.
Nascimento, J., Abrantes, A., and Marques, J. (1999). An
algorithm for centroid-based tracking of moving ob-
jects. In 1999 IEEE ICASSP99 (Cat. No.99CH36258),
volume 6, pages 3305–3308 vol.6.
opencv dev team (2014). Camera Calibration and 3D Re-
construction. OpenCV, 2.4.13.7 edition.
opencv dev team (2021). Template Matching. OpenCV,
4.5.2 edition.
Paszke, A., Chaurasia, A., Kim, S., and Culurciello, E.
(2016). Enet: A deep neural network architecture
for real-time semantic segmentation. arXiv preprint
arXiv:1606.02147.
Patel, S. (2019). Pothole image data-set. https://www.
kaggle.com/sachinpatel21/pothole-image-dataset.
Pereira, G., Pimenta, L., Chaimowicz, L., Fonseca, A.,
Almeida, D., Corr
ˆ
ea, L., Mesquita, R., and Campos,
M. (2006). Robot navigation in multi-terrain outdoor
environments. volume 28, pages 331–342.
Pirsiavash, H., Ramanan, D., and Fowlkes, C. C. (2011).
Globally-optimal greedy algorithms for tracking a
variable number of objects. In CVPR 2011, pages
1201–1208.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017). Pointnet:
Deep learning on point sets for 3d classification and
segmentation.
Qiu, Z., Yan, F., Zhuang, Y., and Leung, H. (2019). Out-
door semantic segmentation for ugvs based on cnn
and fully connected crfs. IEEE Sensors Journal,
19(11):4290–4298.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection.
Ren, R., Fu, H., and Wu, M. (2019). Large-scale outdoor
slam based on 2d lidar. Electronics, 8(6):613.
Ren, S., He, K., Girshick, R., and Sun, J. (2016). Faster
r-cnn: Towards real-time object detection with region
proposal networks.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). Orb: an efficient alternative to sift or surf.
pages 2564–2571.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2014). Going deeper with convolutions.
Tan, M. and Le, Q. V. (2020). Efficientnet: Rethinking
model scaling for convolutional neural networks.
Tareen, S. A. K. and Saleem, Z. (2018). A comparative anal-
ysis of sift, surf, kaze, akaze, orb, and brisk. In 2018
International Conference on Computing, Mathemat-
ics and Engineering Technologies (iCoMET), pages
1–10.
Uc¸ar, A., demir, Y., and G
¨
uzelis¸, C. (2017a). Ob-
ject recognition and detection with deep learning
for autonomous driving applications. SIMULATION,
93:003754971770993.
Uc¸ar, A., demir, Y., and G
¨
uzelis¸, C. (2017b). Ob-
ject recognition and detection with deep learning
for autonomous driving applications. SIMULATION,
93:003754971770993.
Veit, A., Matera, T., Neumann, L., Matas, J., and Belongie,
S. (2016). Coco-text: Dataset and benchmark for text
detection and recognition in natural images.
Vitali, E., Gadioli, D., Palermo, G., Golasowski, M., Bispo,
J., Pinto, P., Martinovic, J., Slaninova, K., Cardoso,
J., and Silvano, C. (2019). An efficient monte carlo-
based probabilistic time-dependent routing calcula-
tion targeting a server-side car navigation system.
IEEE transactions on emerging topics in computing.
Wang, L., Shi, J., Song, G., and Shen, I.-f. (2007). Ob-
ject detection combining recognition and segmenta-
tion. pages 189–199.
Wang, X., Mizukami, Y., Tada, M., and Matsuno, F. (2021).
Navigation of a mobile robot in a dynamic environ-
ment using a point cloud map. Artificial Life and
Robotics, 26(1):10–20.
Yahja, A., Singh, S., and Stentz, A. (2000). Efficient on-line
path planner for outdoor mobile robots. Robotics and
Autonomous Systems, 32.
Yi, C. and Choi, B.-U. (2011). Detection and recovery for
kidnapped-robot problem using measurement entropy.
volume 261, pages 293–299.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
138
