
Safe Policy Improvement Approaches
on Discrete Markov Decision Processes
Philipp Scholl
1,2
, Felix Dietrich
3
, Clemens Otte
2
and Steffen Udluft
2
1
Department of Mathematics, Ludwig-Maximilian-University of Munich, Munich, Germany
2
Learning Systems, Siemens Technology, Munich, Germany
3
Department of Informatics, Technical University of Munich, Munich, Germany
Keywords:
Risk-sensitive Reinforcement Learning, Safe Policy Improvement, Markov Decision Processes.
Abstract:
Safe Policy Improvement (SPI) aims at provable guarantees that a learned policy is at least approximately as
good as a given baseline policy. Building on SPI with Soft Baseline Bootstrapping (Soft-SPIBB) by Nadjahi et
al., we identify theoretical issues in their approach, provide a corrected theory, and derive a new algorithm that
is provably safe on finite Markov Decision Processes (MDP). Additionally, we provide a heuristic algorithm
that exhibits the best performance among many state of the art SPI algorithms on two different benchmarks.
Furthermore, we introduce a taxonomy of SPI algorithms and empirically show an interesting property of two
classes of SPI algorithms: while the mean performance of algorithms that incorporate the uncertainty as a
penalty on the action-value is higher, actively restricting the set of policies more consistently produces good
policies and is, thus, safer.
1 INTRODUCTION
Reinforcement learning (RL) in industrial control ap-
plications such as gas turbine control (Schaefer et al.,
2007) often requires learning a control policy solely
on pre-recorded observation data, known as batch or
offline RL (Lange et al., 2012; Fujimoto et al., 2019;
Levine et al., 2020). This is necessary because an on-
line exploration on the real system or its simulation is
not possible. Assessing the true quality of the learned
policy is difficult in this setting (Hans et al., 2011;
Wang et al., 2021). Thus, Safe Policy Improvement
(Thomas, 2015; Nadjahi et al., 2019) is an attractive
resort as it aims at ensuring that the learned policy is,
with a high probability, at least approximately as good
as a baseline policy given by, e.g., a conventional con-
troller.
Safety is an overloaded term in Reinforcement
Learning as it can refer to the inherent uncertainty,
safe exploration techniques or parameter uncertainty
(Garc
´
ıa and Fernandez, 2015). In this paper we focus
on the latter.
1.1 Related Work
Many of the existing Safe Policy Improvement (SPI)
algorithms utilize the uncertainty of state-action pairs
in one of the two following ways (see also Figure 1):
1. The uncertainty is applied to the action-value
function to decrease the value of uncertain ac-
tions.
2. The uncertainty is used to restrict the set of poli-
cies that can be learned.
Thomas (2015) introduced High Confidence Pol-
icy Improvement (HCPI), an algorithm utilizing con-
centration inequalities on the importance sampling es-
timate of the performance of learned policies to en-
sure that the new policy is better than the baseline
with a high probability. As HCPI simply rejects poli-
cies where the confidence intervals give no certain
improvement, they essentially restrict the set of pos-
sible policies. This restriction is clearer for Robust
MDP (Nilim and El Ghaoui, 2003), which computes
the policy with the best worst-case performance for
all transition probabilities in a convex set, which is
chosen such that the true transition probabilities are
part of it with a high probability.
Petrik et al. (2016) showed that maximizing the
difference between the new policy and a baseline
policy on a rectangular uncertainty set of the tran-
sition probabilities is NP-hard and, thus, derived
the approximation Reward-adjusted MDP (RaMDP).
RaMDP applies the uncertainty to penalize the reward
142
Scholl, P., Dietrich, F., Otte, C. and Udluft, S.
Safe Policy Improvement Approaches on Discrete Markov Decision Processes.
DOI: 10.5220/0010786600003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 142-151
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Taxonomy of SPI algorithms.
and, therefore, the action-value function. Laroche
et al. (2019) extended this algorithm by a hyper-
parameter which controls the influence of the uncer-
tainty. RaMDP computes the uncertainty simply as
a function of the number of visits to a state-action
pair. A more sophisticated approach to estimate the
uncertainty is taken for Diagonal Approximation of
Uncertainty Incorporating Policy Iteration (DUIPI) in
Schneegass et al. (2010), which estimates the standard
deviation of the action-value function and applies this
as a penalty to the action-value function. Utilizing the
uncertainty as an incentive instead of a penalty results
in an explorative algorithm. Applying this correspon-
dence between exploratory and safe behavior to fur-
ther algorithms, one can easily adapt the efficiently
exploring R-MAX (Brafman and Tennenholtz, 2003),
which assigns the highest value possible to all rarely
visited state-action pairs, to its risk averse counterpart
that we denote as R-MIN. This algorithm simply sets
the action-value to the lowest possible value instead
of the highest one for rarely visited state-action pairs.
Returning back to algorithms restricting the policy
set, Laroche et al. (2019) only allow deviations from
the baseline policy at a state-action pair if the uncer-
tainty is low, otherwise it remains the same. They
propose two algorithms: Π
b
-SPIBB, which is prov-
ably safe, and Π
≤b
-SPIBB, which is a heuristic re-
laxation. Both are tested against HCPI, Robust MDP,
and RaMDP. HCPI and Robust MDP are strongly out-
performed by the others and, while the mean perfor-
mance of RaMDP is very good, its safety is inferior
to both SPIBB algorithms. Nadjahi et al. (2019) con-
tinue this line of work and relax the hard bootstrap-
ping to a softer version, where the baseline policy can
be changed at any state-action pair, but the amount
of possible change is limited by the uncertainty at
this state-action pair. They claim that these new al-
gorithms, called Safe Policy Improvement with Soft
Baseline Bootstrapping (Soft-SPIBB), are also prov-
ably safe, a claim that is repeated in Sim
˜
ao et al.
(2020) and Leurent (2020). Furthermore, they extend
the experiments from Laroche et al. (2019) to include
the Soft-SPIBB algorithms, where the empirical ad-
vantage of these algorithms becomes clear.
1.2 Our Contributions
We investigate the class of Soft-SPIBB algorithms
(Nadjahi et al., 2019) and show that they are not
provably safe. Hence, we derive the adaptation Adv-
Approx-Soft-SPIBB which is provably safe. We also
develop the heuristic Lower-Approx-Soft-SPIBB, fol-
lowing an idea presented in Laroche et al. (2019). Ad-
ditionally, we conduct experiments to test these new
versions against their predecessors and add further
uncertainty incorporating algorithms (Brafman and
Tennenholtz, 2003; Schneegass et al., 2010) which
were not considered in Laroche et al. (2019) and Nad-
jahi et al. (2019). Here, we also show how the taxon-
omy illustrated in Figure 1 proves to be helpful, as
both classes of algorithms present different behavior.
The code for the algorithms and experiments can be
found in the accompanying repository.
1
1.3 Outline
The next section introduces the mathematical frame-
work necessary for the later sections. Section 3 begins
with the work done by Nadjahi et al. (2019) and ends
1
https://github.com/Philipp238/Safe-Policy-Improvem
ent-Approaches-on-Discrete-Markov-Decision-Processes
Safe Policy Improvement Approaches on Discrete Markov Decision Processes
143

with a discussion and proof of the shortcomings of the
given safety guarantees. In Section 4 we deduce the
new algorithms, which will be tested against various
competitors on two benchmarks in Section 5.
2 MATHEMATICAL
FRAMEWORK
The control problem we want to tackle with reinforce-
ment learning consists of an agent and an environ-
ment, modeled as a finite Markov Decision Process
(MDP). A finite MDP M
∗
is represented by the tu-
ple M
∗
= (S , A,P
∗
, R
∗
, γ), where S is the finite state
space, A the finite action space, P
∗
the unknown tran-
sition probabilities, R
∗
the unknown stochastic reward
function, the absolute value of which is assumed to be
bounded by R
max
, and 0 ≤γ < 1 is the discount factor.
The agent chooses action a ∈ A with probability
π(a|s) in state s ∈S , where π is the policy controlling
the agent. The return at time t is defined as the dis-
counted sum of rewards G
t
=
∑
T
i=t
γ
i−t
R
∗
(s
i
, a
i
), with
T the time of termination of the MDP. As the reward
function is bounded the return is bounded as well,
since |G
t
| ≤
R
max
1−γ
. So, let G
max
be a bound on the ab-
solute value of the return. The goal is to find a policy
π which optimizes the expected return, i.e., the state-
value function V
π
M
∗
(s) = E
π
[G
t
|S
t
= s] for the initial
state s ∈ S . Similarly, the action-value function is de-
fined as Q
π
M
∗
(s, a) = E
π
[G
t
|S
t
= s, A
t
= a].
Given data D = (s
j
, a
j
, r
j
, s
′
j
)
j=1,...,n
collected by
the baseline policy π
b
, let N
D
(s, a) denote the num-
ber of visits of the state-action pair (s, a) in D and
ˆ
M = (S , A ,
ˆ
P,
ˆ
R, γ) the Maximum Likelihood Estima-
tor (MLE) of M
∗
where
ˆ
P(s
′
|s, a) =
∑
(s
j
=s,a
j
=a,r
j
,s
′
j
=s
′
)∈D
1
N
D
(s, a)
(1)
and
ˆ
R(s, a) =
∑
(s
j
=s,a
j
=a,r
j
,s
′
j
)∈D
r
j
N
D
(s, a)
. (2)
3 THE SOFT-SPIBB PARADIGM
The idea in Nadjahi et al. (2019) is to estimate the
uncertainty in the state-action pairs and bound the
change in the baseline policy accordingly.
3.1 Preliminaries
To bound the performance of the new policy it is nec-
essary to bound the estimate of the action-value func-
tion. In Nadjahi et al. (2019) this is done for Q
π
ˆ
M
by applying Hoeffding’s inequality. However, Ho-
effding’s inequality is only applicable for the arith-
metic mean of independent, bounded random vari-
ables, thus, we define
ˆ
Q
π
b
D
(s, a) =
1
n
∑
n
i=1
G
t
i
as the
Monte Carlo estimate of the action-value function,
where t
1
, ...,t
n
are times such that (S
t
i
, A
t
i
) = (s, a) for
all i = 1, ..., n. See Scholl (2021) for a discussion of
the (approximate) independence of G
t
i
. Following the
proof in Appendix A.2 in Nadjahi et al. (2019) yields
that
|Q
π
b
M
∗
(s, a) −
ˆ
Q
π
b
D
(s, a)| ≤ e
Q
(s, a)G
max
(3)
holds with probability 1 −δ for all state-action pairs.
Here, e
Q
is the error function computing the uncer-
tainty of one state-action pair and is given by
e
Q
(s, a) =
s
2
N
D
(s, a)
log
2|S ||A|
δ
. (4)
Analogously,
||P(·|s, a) −
ˆ
P(·|s, a)||
1
≤ e
P
(s, a), (5)
holds with probability 1 −δ where
e
P
(s, a) =
s
2
N
D
(s, a)
log
2|S ||A|2
|A|
δ
. (6)
The error functions are used to quantify the uncer-
tainty of each state-action pair.
Definition 1. A policy π is (π
b
, ε, e)-constrained w.r.t.
a baseline policy π
b
, an error function e and a hyper-
parameter ε > 0, if
∑
a∈A
e(s, a)|π(a|s) −π
b
(a|s)| ≤ ε (7)
holds for all states s ∈ S .
So, if a policy π is (π
b
, ε, e)-constrained, it means
that the l
1
-distance between π and π
′
, weighted by
some error function e, is at most ε. To utilize Equation
3 later the following property is also necessary:
Definition 2. A policy π is π
b
-advantageous w.r.t. the
function Q : S ×A → R, if
∑
a
Q(s, a)π(a|s) ≥
∑
a
Q(s, a)π
b
(a|s) (8)
holds for all states s ∈ S .
Note that this is an extension of Definition 3 in
Nadjahi et al. (2019) to arbitrary functions and can,
thus, be used for
ˆ
Q
π
b
D
. Interpreting Q as some kind
of action-value function, Definition 2 gives that the
policy π chooses higher valued actions than policy π
′
for every state.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
144

3.2 The Algorithms
The new class of algorithms (Nadjahi et al., 2019) in-
troduce make use of the classical Policy Evaluation
and Policy Improvement scheme (Sutton and Barto,
2018), where the Policy Evaluation step is completely
analogous to the one for dynamic programming with
estimated model parameters
ˆ
P and
ˆ
R. The Policy Im-
provement step, however, aims at solving the con-
strained optimization problem:
π
(i+1)
= argmax
π
∑
a∈A
Q
π
(i)
ˆ
M
(s, a)π(a|s) (9)
subject to:
Constraint 1: π
(i+1)
(·|s) being a probability over A :
∑
a∈A
π
(i+1)
(a|s) = 1 and ∀a ∈ A : π
(i+1)
(a|s) ≥ 0.
Constraint 2: π
(i+1)
being (π
b
, e, ε)-constrained.
Thus, it tries to compute the optimal—w.r.t.
the action-value function of the previous policy—
(π
b
, e, ε)-constrained policy. The two algorithms
introduced in Nadjahi et al. (2019) solving this
optimization problems are Exact-Soft-SPIBB and
Approx-Soft-SPIBB. The former solves the linear for-
mulation of the constrained problem by a linear pro-
gram (Dantzig, 1963) and the latter uses a budget cal-
culation for Constraint 2 to compute an approximate
solution. In experiments, it is shown that both algo-
rithms achieve similar performances, but Exact-Soft-
SPIBB takes considerably more time (Nadjahi et al.,
2019).
3.3 The Safety Guarantees
Nadjahi et al. (2019) derive the theoretical safety of
their algorithms from the following two theorems.
Theorem 1 shows that the performance of a policy
which fulfills the two properties from Definitions 1
and 2, where the error function e is such that Equa-
tion 3 holds, can be bounded from below with a high
probability.
Theorem 1. For any (π
b
, e
Q
, ε)-constrained policy
that is π
b
-advantageous w.r.t.
ˆ
Q
π
b
D
, which is estimated
with independent returns for each state-action pair,
the following inequality holds:
P
D
∀s ∈ S : V
π
M
∗
(s) −V
π
b
M
∗
(s) ≥ −
εG
max
1 −γ
≥ 1 −δ,
where M
∗
is the true MDP on which the data D gets
sampled by the baseline policy π
b
, 0 ≤ γ < 1 is the
discount factor, and δ > 0 is the safety parameter for
e
Q
.
This is essentially the same as Theorem 1 in Nad-
jahi et al. (2019) if Equation 3 from this paper is used
instead of Equation 2 in Nadjahi et al. (2019). A full
version of the proof with an accompanying thorough
discussion can be found in Scholl (2021).
The optimization problem solved by the Soft-
SPIBB algorithms, however, does not enforce that the
new policy is π
b
-advantageous w.r.t.
ˆ
Q
π
b
D
and, so, The-
orem 1 cannot be applied to them. Therefore, Nadjahi
et al. (2019) prove Theorem 2 by assuming the fol-
lowing:
Assumption 1. There exists a constant κ <
1
γ
such
that, for all state-action pairs (s, a) ∈ S ×A , the fol-
lowing holds:
∑
s
′
,a
′
e
P
(s
′
, a
′
)π
b
(a
′
|s
′
)P
∗
(s
′
|s, a) ≤ κe
P
(s, a) (10)
Interpreting π
b
(a
′
|s
′
)P
∗
(s
′
|s, a) as the probability
of observing the state-action pair (s
′
, a
′
) after observ-
ing (s, a) we can rewrite Equation 10 to
E
P,π
b
[e
P
(S
t+1
, A
t+1
)|S
t
= s, A
t
= a] ≤ κe
P
(s, a) (11)
which shows that Assumption 1 assumes an upper
bound on the expected number of visits of the next
state-action pair dependent on the number of visits of
the current one. This might intuitively make sense,
but we show in the next section that it is wrong in gen-
eral. However, using this assumption Nadjahi et al.
(2019) prove Theorem 2 which omits the advanta-
geous assumption of the new policy.
Theorem 2. Under Assumption 1, any (π
b
, e
P
, ε)-
constrained policy π satisfies the following inequality
in every state s with probability at least 1 −δ:
V
π
M
∗
(s) −V
π
b
M
∗
(s) ≥V
π
ˆ
M
(s) −V
π
b
ˆ
M
(s)+
2||d
M
π
(·|s) −d
M
π
b
(·|s)||
1
v
max
−
1 + γ
(1 −γ)
2
(1 −κγ)
εv
max
(12)
Here, d
M
π
(s
′
|s) denotes the expected discounted
sum of visits to s
′
when starting in s.
3.4 Shortcomings of the Theory
As explained above, the theoretical guarantees, Nad-
jahi et al. (2019) claim for the Soft-SPIBB algorithms,
stem from Theorem 1 and 2. However, Theorem 1 is
only applicable to policies which are π
b
-advantageous
w.r.t.
ˆ
Q
π
b
D
and Theorem 2 relies on Assumption 1. In
the following we show in Theorem 3 that Assumption
1 does not hold for any 0 < γ < 1.
Theorem 3. Let the discount factor 0 < γ < 1 be ar-
bitrary. Then there exists an MDP M with transition
probabilities P such that for any behavior policy π
b
Safe Policy Improvement Approaches on Discrete Markov Decision Processes
145

and any data set D, which contains every state-action
pair at least once, it holds that, for all 0 < δ < 1,
∑
s
′
,a
′
e
P
(s
′
, a
′
)π
b
(a
′
|s
′
)P(s
′
|s, a) >
1
γ
e
P
(s, a). (13)
This means that Assumption 1 can, independent of the
discount factor, not be true for all MDPs.
Figure 2: MDP with n + 1 states, n of them are final states
and in the non-final state, there is only 1 action, leading to
one of the others with equal probability.
Proof. Let 0 < γ < 1 be arbitrary and n ∈ N be such
that
√
n >
1
γ
. Let M be the MDP displayed in Figure
2. It has n +1 states, from which n states are terminal
states, labeled 1, 2, ..., n. In the only non-terminal
state 0, there is only one action available and choosing
it results in any of the terminal states with probability
1
n
. As there is only one action, one can omit the action
in the notation of e
P
and there is only one possible
behavior policy. So, Equation 13 can be reduced to
n
∑
i=1
e
P
(i)
n
>
e
P
(0)
γ
. (14)
Now, we show that
n
∑
i=1
e
P
(i)
n
≥
√
ne
P
(0), (15)
which implies Equation 14 as
√
n >
1
γ
. Let D denote
the data collected on this MDP such that every state
has been visited at least once. Thus, N
D
(i) > 0—the
number of visits to state i—holds for every i. Equa-
tion 15 is equivalent to
1
n
n
∑
i=1
1
p
N
D
(i)
≥
√
n
√
N
(16)
where N = N
D
(0) =
∑
n
i=1
N
D
(i). Equation 16 follows
by applying Jensen’s inequality once for the convex
function x 7→
1
x
, restricted to x > 0, and once for the
concave function x 7→
√
x, also restricted to x > 0:
1
n
n
∑
i=1
1
p
N
D
(i)
≥
1
1
n
∑
n
i=1
p
N
D
(i)
≥
1
q
1
n
∑
n
i=1
N
D
(i)
=
1
q
N
n
=
√
n
√
N
. (17)
The class of MDPs used in the proof and depicted
in Figure 2 gives a good impression what kind of con-
stellations are critical for Assumption 1. An MDP
does not have to exhibit exactly the same structure
to have similar effects, it might already be enough if
there is a state-action pair from which a lot of differ-
ent states-action pairs are exclusively accessible.
A reasonable question is whether although As-
sumption 1 is invalid in its generality shown at some
specific class of MDPs it might hold on simple MDPs
which are not built in order to disprove Assumption 1.
One consideration here is that n does not need to be
especially big as the proof only required
√
n >
1
γ
. So,
for any γ >
1
√
2
≈ 0.707 it suffices to choose n = 2.
Furthermore, we tested Assumption 1 empirically
on the Random MDPs benchmark considered in Nad-
jahi et al. (2019) where we found for no discount fac-
tor greater than 0.6 a baseline policy and data set such
that the assumption holds for all state-action pairs.
2
Consequently, we conclude that Assumption 1 is
not reasonable and, thus, Theorem 2 cannot be relied
upon. As mentioned before, Theorem 1 is only appli-
cable to π
b
-advantageous w.r.t.
ˆ
Q
π
b
D
policies. For this
reason, both Soft-SPIBB algorithms are not provably
safe.
4 ALGORITHMS
In this section we introduce the adaptation Adv-
Approx-Soft-SPIBB which produces (π
b
, e
Q
, ε)-
constrained and π
b
-advantageous w.r.t.
ˆ
Q
π
b
D
policies
and, thus, Theorem 1 is applicable to it, making it
provably safe. Additionally, we present the heuristic
adaptation Lower-Approx-Soft-SPIBB. As both
algorithms function similarly to their predecessors by
constraining the policy set, they also belong to the
category ”Uncertainty as a restriction on the set of
policies” in the taxonomy in Figure 1.
4.1 Adv-Approx-Soft-SPIBB
The advantageous version of the Soft-SPIBB algo-
rithms solve the following optimization problem in
the Policy Improvement (PI) step:
π
(i+1)
= argmax
π
∑
a∈A
Q
π
(i)
ˆ
M
(s, a)π(a|s) (18)
subject to:
Constraint 1: π
(i+1)
(·|s) being a probability over A :
2
https://anonymous.4open.science/r/Safe-Policy-
Improvement-Approaches-on-Discrete-Markov-Decision-
Processes-091D/auxiliary tests/assumption test.py
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
146
∑
a∈A
π
(i+1)
(a|s) = 1 and ∀a ∈ A : π
(i+1)
(a|s) ≥ 0.
Constraint 2: π
(i+1)
being (π
b
, e, ε)-constrained.
Constraint 3: π
(i+1)
being π
b
-advantageous w.r.t.
ˆ
Q
π
b
D
.
The original Soft-SPIBB algorithms solve this op-
timization problem without Constraint 3 as shown in
Section 3.2. To solve the problem including constraint
3, we introduce Adv-Approx-Soft-SPIBB. This al-
gorithm works exactly as its predecessor Approx-
Soft-SPIBB except that it keeps an additional bud-
geting variable ensuring that the new policy is π
b
-
advantageous w.r.t.
ˆ
Q
π
b
D
.
The derivation of a successor algorithm of Exact-
Soft-SPIBB is straightforward since Constraint 3 is
linear, however, we observed for Exact-Soft-SPIBB
and its successor numerical issues, so, we omit them
in the experiments in Section 5.
4.2 Lower-Approx-Soft-SPIBB
To introduce the heuristic adaptation of Approx-Soft-
SPIBB we need a relaxed version of the constrained-
ness property.
Definition 3. A policy π is (π
b
, ε, e)-lower-
constrained w.r.t. a baseline policy π
b
, an error
function e, and a hyper-parameter ε, if
∑
a∈A
e(s, a)max{0, π(a|s) −π
b
(a|s)} ≤ ε (19)
holds for all states s ∈ S .
This definition does not punish a change in uncer-
tain state-action pairs if the probability of choosing
it is decreased, which follows the same logic as the
empirically very successful adaptation Π
≤b
-SPIBB
(Laroche et al., 2019). The optimization problem
solved by Lower-Approx-Soft-SPIBB is the follow-
ing:
π
(i+1)
= argmax
π
∑
a∈A
Q
π
(i)
ˆ
M
(s, a)π(a|s) (20)
subject to:
Constraint 1: π
(i+1)
(·|s) being a probability over A :
∑
a∈A
π
(i+1)
(a|s) = 1 and ∀a ∈ A : π
(i+1)
(a|s) ≥ 0.
Constraint 2: π
(i+1)
being (π
b
, e, ε)-lower-con-
strained.
Even though Lower-Approx-Soft-SPIBB is—just
as its predecessor Approx-Soft-SPIBB—not provably
safe, the experiments in Section 5 show that it per-
forms empirically the best out of the whole SPIBB
family.
5 EXPERIMENTS
We test the new Soft-SPIBB algorithms against Ba-
sic RL (classical Dynamic Programming (Sutton
and Barto, 2018) on the MLE MDP
ˆ
M, Approx-
Soft-SPIBB (Nadjahi et al., 2019), its predecessors,
Π
b
- and Π
≤b
-SPIBB (Laroche et al., 2019), DUIPI
(Schneegass et al., 2010), RaMDP (Petrik et al.,
2016) and R-MIN, the pessimistic adaptation of R-
MAX (Brafman and Tennenholtz, 2003). We omit
HCPI (Thomas, 2015) and Robust MDPs (Nilim and
El Ghaoui, 2003) due to their inferior performance
compared to the SPIBB and Soft-SPIBB algorithms
reported in Laroche et al. (2019) and Nadjahi et al.
(2019).
We use two different benchmarks for our compari-
son. The first one is the Random MDPs benchmark al-
ready used in Laroche et al. (2019) and Nadjahi et al.
(2019). As the second benchmark we use the Wet
Chicken benchmark (Hans and Udluft, 2009) which
depicts a more realistic scenario.
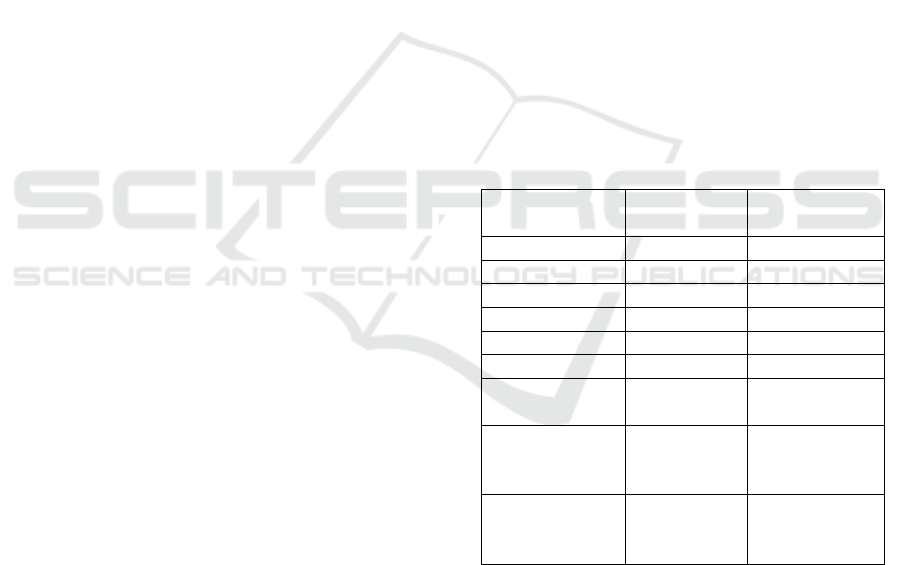
We perform a grid-search to choose the optimal
hyper-parameter for each algorithm for both bench-
marks. Our choices can be found in the table below.
Table 1: Chosen hyper-parameters for both benchmarks.
Algorithms
Random
MDPs
Wet Chicken
Basic RL - -
RaMDP κ = 0.05 κ = 2
R-MIN N
∧
= 3 N
∧
= 3
DUIPI ξ = 0.1 ξ = 0.5
Π
b
-SPIBB N
∧
= 10 N
∧
= 7
Π
≤b
-SPIBB N
∧
= 10 N
∧
= 7
Approx
-Soft-SPIBB
δ = 1, ε = 2 δ = 1, ε = 1
Adv-Approx
-Soft-SPIBB
(ours)
δ = 1, ε = 2 δ = 1, ε = 1
Lower-Approx
-Soft-SPIBB
(ours)
δ = 1, ε = 1 δ = 1, ε = 0.5
5.1 Random MDP Benchmark
We consider the grid-world Random MDPs bench-
mark introduced in Nadjahi et al. (2019) which gen-
erates a new MDP in each iteration. The generated
MDPs consist of 50 states, including an initial state
(denoted by 0) and a final state. In every non-terminal
state there are four actions available and choosing one
leads to four possible next states. All transitions yield
zero reward except upon entering the terminal state,
Safe Policy Improvement Approaches on Discrete Markov Decision Processes
147

(a) Mean (b) 1%-CVaR
Figure 3: Mean (a) and 1%-CVaR (b) normalized performance over 10,000 trials on the Random MDPs benchmark for
ρ
π
b
= 0.9. In the context of SPI the focus lies on the 1%-CVaR. The mean performance is dominated by the algorithms
applying a penalty on the action-value function, while the restricting algorithms are winning for few data points in the risk-
sensitive 1%-CVaR measure and only lose to DUIPI in the long run. Among the SPIBB class, Lower-Approx-Soft-SPIBB
shows the best performance in both runs.
which gives a reward of 1. As the discount factor is
chosen as γ = 0.95, maximizing the return is equiva-
lent to finding the shortest route to the terminal state.
The baseline policy on each MDP is computed
such that its performance is approximately ρ
π
b
=
V
π
b
M
∗
(0) = ηV
π
∗
M
∗
(0)+ (1 −η)V
π
u
M
∗
(0), where 0 ≤η ≤1
is the baseline performance target ratio interpolat-
ing between the performance of the optimal policy
π
∗
and the uniform policy π
u
. The generation of
the baseline policy starts with a softmax on the opti-
mal action-value function and continues with adding
random noise to it, until the desired performance is
achieved (Nadjahi et al., 2019). To counter the ef-
fects from incorporating knowledge about the opti-
mal policy, the MDP is altered after the generation of
the baseline policy by transforming one regular state
to a terminal one, called good easter egg, which also
yields a reward of 1.
In this experiment, 10, 000 iterations were run
and the performances are normalized to make them
more comparable between different runs by calcu-
lating
¯
ρ
π
=
ρ
π
−ρ
π
b
ρ
π
∗
−ρ
π
b
. Thus,
¯
ρ
π
< 0 means a worse
performance than the baseline policy,
¯
ρ
π
> 0 means
an improvement w.r.t. the baseline policy and
¯
ρ
π
= 1
means the optimal performance was reached. As we
are interested in Safe Policy Improvement, we follow
Chow et al. (2015), Laroche et al. (2019), and Nad-
jahi et al. (2019) and consider besides the mean per-
formance also the 1%-CVaR (Critical Value at Risk)
performance, which is the mean performance over the
1% worst runs.
These two measures can be seen in Figure 3,
where we show the performance of the algorithms for
their optimal respective hyper-parameter, as displayed
in Table 1. In the mean performance, RaMDP and
DUIPI outperform every other algorithm as soon as at
least 20 trajectories are observed. They are followed
by Lower-Approx-Soft-SPIBB and Basic RL, which
come just before the other Soft-SPIBB algorithms.
Approx-Soft-SPIBB shows a slightly better perfor-
mance than its successor Adv-Approx-Soft-SPIBB.
Π
b
-SPIBB (SPIBB) and Π
≤b
-SPIBB (Lower-SPIBB)
seem to perform the worst. While R-MIN exhibits is-
sues when the data set is very small, it catches up with
the others for bigger data sets. Interestingly, Basic
RL performs generally quite well, but is still outper-
formed by some algorithms, which might be surpris-
ing as the others are intended for safe RL instead of
an optimization of their mean performance. The rea-
son for this might be that considering the uncertainty
of the action-value function is even beneficial for the
mean performance.
The performance in the worst percentile looks
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
148

very different. Here, it can be seen how well the safety
mechanisms of some of the algorithms work, par-
ticularly when compared to Basic RL, which shows
the worst overall 1%-CVaR performance. Also, R-
MIN and RaMDP perform very poorly especially for
a low number of trajectories. For less than 100 tra-
jectories, DUIPI performs also very poorly but out-
performs every other algorithm for bigger data sets.
An interesting observation is that all the SPIBB and
Soft-SPIBB algorithms perform in the beginning ex-
tremely well, which is expected as they fall back
to the behavior policy if not much data is available.
The ranking in the SPIBB family stays the same
for the 1%-CVaR as it has been for the mean per-
formance: Lower-Approx-Soft-SPIBB performs the
best, closely followed first by Approx-Soft-SPIBB
and Adv-Approx-Soft-SPIBB. Π
≤b
-SPIBB falls a bit
behind but still manages to perform better than the
original Π
b
-SPIBB.
5.2 Wet Chicken Benchmark
Besides reproducing the results of Nadjahi et al.
(2019) for additional algorithms, we extend their ex-
periments to a more realistic scenario for which we
have chosen the discrete version of the Wet Chicken
benchmark (Hans and Udluft, 2009) because of its
heterogeneous stochasticity. Figure 4 visualizes the
setting of the Wet Chicken benchmark. The basic
idea behind it is that a person floats in a small boat
on a river. The river has a waterfall at one end and the
goal of the person is to stay as close to the waterfall
as possible without falling down. Thus, the closer the
person is to the waterfall the higher the reward gets,
but upon falling down they start again at the starting
place, which is as far away from the waterfall as pos-
sible. Therefore, this is modeled as a non-episodic
MDP.
The whole river has a length and width of 5, so,
there are 25 states. The starting point is (x, y) = (0, 0)
and the waterfall is at x = 5. The position of the
person at time t is denoted by the pair (x
t
, y
t
). The
river itself has a turbulence which is stronger near the
shore the person starts close to (y = 0) and a stream
towards the waterfall which is stronger near the other
shore (y = 4). The velocity of the stream is defined as
v
t
= y
t
3
5
and the turbulence as b
t
= 3.5−v
t
. The effect
of the turbulence is stochastic; so, let τ
t
∼U(−1, 1)
be the parameter describing the stochasticity of the
turbulence at time t.
The person has 5 actions, which are (a
x
and a
y
describe the influence of an action on x
t
and y
t
, re-
spectively):
• Drift: The person does nothing, in formula
Figure 4: The setting of the Wet Chicken benchmark used
for reinforcement learning. The boat starts at (x, y) = (0, 0)
and starts there again upon falling down the waterfall at x =
5. The arrows show the direction and strength of the stream
towards the waterfall. Additionally, there are turbulences
which are stronger for small y. The goal for the boat is
to stay as close as possible to the waterfall without falling
down.
(a
x
, a
y
) = (0, 0).
• Hold: The person paddles back with half their
power, in formula (a
x
, a
y
) = (−1, 0).
• Paddle back: The person wholeheartedly paddles
back, in formula (a
x
, a
y
) = (−2, 0).
• Right: The person tries to go to the right parallel
to the waterfall, in formula (a
x
, a
y
) = (0, 1).
• Left: The person tries to go to the left parallel to
the waterfall, in formula (a
x
, a
y
) = (0, −1).
The new position of the person assuming no river
constraints is then calculated by
( ˆx, ˆy) = (round(x
t
+ a
x
+ v
t
+ τ
t
s
t
), round(x
t
+ a
y
))
(21)
where the round function is the usual one, i.e., a num-
ber is getting rounded down if the first decimal is 4
or less and rounded up otherwise. Incorporating the
boundaries of the river yields the new position as
x
t+1
=
ˆx, if 0 ≤ ˆx ≤ 4
0, otherwise
(22)
and
y
t+1
=
0, if ˆx > 4
4, if ˆy > 4
0, if ˆy > 0
ˆy, otherwise
. (23)
As the aim of this experiment is to have a realistic
setting for Batch RL, we use a realistic behavior pol-
icy. Thus, we do not incorporate any knowledge about
the transition probabilities or the optimal policy as it
has been done for the Random MDPs benchmark. In-
stead we devise heuristically a policy, considering the
overall structure of the MDP.
Safe Policy Improvement Approaches on Discrete Markov Decision Processes
149

(a) Mean (b) 1%-CVaR
Figure 5: Mean (a) and 1%-CVaR (b) performance over 10,000 trials on the Wet Chicken benchmark for ε = 0.1 for the
baseline policy. The mean performance is dominated by RaMDP, while the restricting algorithms are winning in the risk-
sensitive 1%-CVaR measure. Among the SPIBB class, Lower-Approx-Soft-SPIBB shows the best performance in both runs.
Our behavior policy follows the idea that the most
beneficial state might lie in the middle of the river at
(x, y) = (2, 2). This idea stems from two trade-offs.
The first trade-off is between low rewards for a small
x and a high risk of falling down for a big x and the
second trade-off is between a high turbulence and low
velocity for a low y and the opposite for big y. To be
able to ensure the boat stays at the same place turbu-
lence and velocity should both be limited.
This idea is enforced through the following proce-
dure. If the boat is not in the state (2, 2), the person
tries to get there and if they are already there, they
use the action paddle back. Denote this policy with
π
′
b
. The problem with this policy is that it is deter-
ministic, i.e., in every state there is only one action
which is chosen with probability 1. This means that
for each state there is at most 1 action for which data
is available when observing this policy. This is coun-
tered by making π
′
b
ε-greedy, i.e., define the behavior
policy π
b
as the mixture
π
b
= (1 −ε)π
′
b
+ επ
u
(24)
where π
u
is the uniform policy which chooses every
action in every state with the same probability. ε was
chosen to be 0.1 in the following experiments.
Again, the experiment was run 10,000 times for
each algorithm and each hyper-parameter and show
the mean and 1%-CVaR performance in Figure 5 for
the optimal hyper-parameter, as displayed in Table 1.
Apart from DUIPI, the results are similar to those on
the Random MDPs benchmark. Again, the mean per-
formance of R-MIN is extremely bad for few data but
then improves strongly. Basic RL and DUIPI exhibit
the worst mean performance. All algorithms from the
SPIBB family perform very well, especially Lower-
Approx-Soft-SPIBB, and are only beaten by RaMDP.
Once more, the 1%-CVaR performance is of high
interest for us and Figure 5 confirms many of the
observations from the Random MDPs benchmark as
well. We find again that especially Basic RL—not
even visible in the plot due to its inferior perfor-
mance—, but also RaMDP and R-MIN have prob-
lems competing with the SPIBB and Soft-SPIBB al-
gorithms. Overall, Lower-Approx-Soft-SPIBB per-
forms the best, followed by Adv-Approx-Soft-SPIBB
and Approx-Soft-SPIBB.
These two experiments demonstrate that restrict-
ing the set of policies instead of adjusting the action-
value function can be very beneficial for the safety as-
pect of RL, especially in complex environments and
for a low number of observations. On the contrary,
from a pure mean performance point of view it is fa-
vorable to rather adjust the action-value function.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
150

6 CONCLUSION
We show that the algorithms proposed in Nadjahi
et al. (2019) are not provably safe and propose a new
version that is provably safe. We also adapt their ideas
to derive a heuristic algorithm which shows, among
the entire SPIBB class on two different benchmarks,
both the best mean performance and the best 1%-
CVaR performance, which is important for safety-
critical applications. Furthermore, it proves to be
competitive in the mean performance against other
state of the art uncertainty incorporating algorithms
and especially to outperform them in the 1%-CVaR
performance. Additionally, it has been shown that
the theoretically supported Adv-Approx-Soft-SPIBB
performs almost as well as its predecessor Approx-
Soft-SPIBB, only falling slightly behind in the mean
performance.
The experiments also demonstrate different prop-
erties of the two classes of SPI algorithms in Figure 1:
algorithms penalizing the action-value functions tend
to perform better in the mean, but lack in the 1%-
CVaR, especially if the available data is scarce.
Perhaps the most relevant direction of future work
is how to apply this framework to continuous MDPs,
which has so far been explored by Nadjahi et al.
(2019) without theoretical safety guarantees. Apart
from theory, we hope that our observations of the two
classes of SPI algorithms can contribute to the choice
of algorithms for the continuous case.
REFERENCES
Brafman, R. I. and Tennenholtz, M. (2003). R-MAX - a
general polynomial time algorithm for near-optimal
reinforcement learning. Journal of Machine Learning
Research, 3.
Chow, Y., Tamar, A., Mannor, S., and Pavone, M. (2015).
Risk-sensitive and robust decision-making: a CVaR
optimization approach. In Proceedings of the 28th
International Conference on Neural Information Pro-
cessing Systems.
Dantzig, G. B. (1963). Linear Programming and Exten-
sions. RAND Corporation, Santa Monica, CA.
Fujimoto, S., Meger, D., and Precup, D. (2019). Off-policy
deep reinforcement learning without exploration. In
Proc. of the 36th International Conference on Ma-
chine Learning.
Garc
´
ıa, J. and Fernandez, F. (2015). A Comprehensive Sur-
vey on Safe Reinforcement Learning. Journal of Ma-
chine Learning Research., 16.
Hans, A., Duell, S., and Udluft, S. (2011). Agent self-
assessment: Determining policy quality without ex-
ecution. In IEEE Symposium on Adaptive Dynamic
Programming and Reinforcement Learning.
Hans, A. and Udluft, S. (2009). Efficient Uncertainty Propa-
gation for Reinforcement Learning with Limited Data.
In Artificial Neural Networks – ICANN, volume 5768.
Lange, S., Gabel, T., and Riedmiller, M. (2012). Batch
Reinforcement Learning. In Reinforcement Learning:
State-of-the-Art, Adaptation, Learning, and Optimiza-
tion. Springer, Berlin, Heidelberg.
Laroche, R., Trichelair, P., and Tachet des Combes, R.
(2019). Safe policy improvement with baseline boot-
strapping. In Proc. of the 36th International Confer-
ence on Machine Learning.
Leurent, E. (2020). Safe and Efficient Reinforcement Learn-
ing for Behavioural Planning in Autonomous Driving.
Theses, Universit
´
e de Lille.
Levine, S., Kumar, A., Tucker, G., and Fu, J. (2020). Offline
reinforcement learning: Tutorial, review, and perspec-
tives on open problems. CoRR, abs/2005.01643.
Nadjahi, K., Laroche, R., and Tachet des Combes, R.
(2019). Safe policy improvement with soft baseline
bootstrapping. In Proc. of the 2019 European Confer-
ence on Machine Learning and Principles and Prac-
tice of Knowledge Discovery in Databases.
Nilim, A. and El Ghaoui, L. (2003). Robustness in Markov
decision problems with uncertain transition matrices.
In Proc. of the 16th International Conference on Neu-
ral Information Processing Systems.
Petrik, M., Ghavamzadeh, M., and Chow, Y. (2016). Safe
policy improvement by minimizing robust baseline re-
gret. In Proceedings of the 30th International Con-
ference on Neural Information Processing Systems,
NIPS’16, Red Hook, NY, USA. Curran Associates
Inc.
Schaefer, A. M., Schneegass, D., Sterzing, V., and Udluft, S.
(2007). A neural reinforcement learning approach to
gas turbine control. In International Joint Conference
on Neural Networks.
Schneegass, D., Hans, A., and Udluft, S. (2010). Uncer-
tainty in Reinforcement Learning - Awareness, Quan-
tisation, and Control. In Robot Learning. Sciyo.
Scholl, P. (2021). Evaluation of safe policy improvement
with soft baseline bootstrapping. Master’s thesis,
Technical University of Munich.
Sim
˜
ao, T. D., Laroche, R., and Tachet des Combes, R.
(2020). Safe Policy Improvement with an Estimated
Baseline Policy. In Proc. of the 19th International
Conference on Autonomous Agents and MultiAgent
Systems.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Thomas, P. S. (2015). Safe Reinforcement Learning. Doc-
toral dissertations., University of Massachusetts.
Wang, R., Foster, D., and Kakade, S. M. (2021). What
are the statistical limits of offline RL with linear func-
tion approximation? In International Conference on
Learning Representations.
Safe Policy Improvement Approaches on Discrete Markov Decision Processes
151
