
AnimaChaotic: AI-based Automatic Conversion of Children’s Stories to
Animated 3D Videos
Reem Abdel-Salam, Reem Gody, Mariam Maher, Hagar Hosny and Ahmed S. Kaseb
Computer Engineering Department, Faculty of Engineering, Cairo University, Giza, Egypt
Keywords:
Multimedia, AI, NLP, Storytelling, Scene Generation, Story Generation, Information Extraction.
Abstract:
Stories are an effective and entertaining way of teaching children about real-life experiences in an engaging
way. Although many children’s stories are supplemented with graphical illustrations, having animated 3D
video illustrations can effectively boost the learning process, especially for visual learners. However, produc-
ing animated 3D videos is a hard, expensive, and time-consuming process, so there is a need to automate this
process. In this paper, we introduce AnimaChaotic, a story visualization system designed to automatically
convert children’s short stories to animated 3D videos by leveraging Artificial Intelligence (AI) and computer
graphics. Our Natural Language Processing (NLP) pipeline extracts visualizable information from the story
such as actors and actions. Then, our object positioning algorithm determines the initial positions of the ob-
jects in the scene. Finally, the system animates the scene using different techniques including AI behaviors.
A quantitative analysis of our system demonstrates a high precision and recall in extracting visualizable in-
formation. It also shows that our system outperforms existing solutions in terms of static scene generation. A
qualitative analysis of the system shows that its output is visually acceptable and outperforms similar solutions.
1 INTRODUCTION
People have used stories for thousands of years. Sto-
ries capture the attention of young children, teach
them about the world around them, and summarize
life experiences in a simple and engaging method.
Most of the available children stories are text-based
and sometimes supplemented with graphical illustra-
tions to ease their understanding. This might not be
enough for some children who would benefit more
from a visual learning experience in which they can
read, watch, and listen at the same time. Since reading
is an important skill to learn at an early age, it is use-
ful to have the stories supplemented with 3D video il-
lustrations to encourage all the children to read while
satisfying their different needs.
However, video illustrations are not available for
all stories as they are hard, expensive, and time-
consuming to produce. This is because producing
animated 3D videos involves collecting or creating
necessary models for actors and objects, construct-
ing scenes relevant to the story, and developing the
interactions of actors and objects in the scene. All
this requires expertise (from artists and developers) in
using advanced software tools. That is why there is
a need for a system to automate the process of con-
verting stories to 3D video illustrations and make it
accessible to everyone
This paper proposes AnimaChaotic
1
, a system
that automatically converts children’s short stories to
animated 3D videos by leveraging AI and computer
graphics. For an input story text, the system uses
NLP techniques to extract visualizable information
such as: i) Physical objects, their properties, and their
constraints. ii) Actions performed by the story actors.
iii) Dialogues between the actors. iv) Emotions of the
actors. v) Weather conditions. vi) Background scene.
Then, accordingly, the system produces the animated
3D video by constructing the scene, positioning the
objects, scheduling the events, animating the scene,
and overlaying the audio of the dialogues.
Experiments show that the precision and recall of
extracting visualizable information is more than 96%
(even for the most challenging information such as
indirect objects). Then, we show that our system out-
performs a similar existing solution in an end-to-end
comparison in terms of static scene generation. Fi-
nally, we conduct a qualitative evaluation of the sys-
tem using a user survey which shows that the output
1
AnimaChaotic Video Trailers and Showcases:
http://www.youtube.com/watch?v=o8vY0U4bX1k
http://www.youtube.com/watch?v=Jz1qfO7PtAA
226
Abdel-Salam, R., Gody, R., Maher, M., Hosny, H. and S. Kaseb, A.
AnimaChaotic: AI-based Automatic Conversion of Children’s Stories to Animated 3D Videos.
DOI: 10.5220/0010815100003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 226-235
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

from our system is visually acceptable and outper-
forms the competition.
The contributions of this paper are:
• To the best of our knowledge, AnimaChaotic is
the first system to convert stories to animated 3D
videos while supporting a wide range of visualiz-
able information such as scenes, objects, actors,
actions, emotions, dialogues, and weather con-
ditions. The system is extendible such that new
scenes, objects, actors, and emotions can easily
be supported by extending the database.
• The system handles word and verb disambigua-
tion to extract visualizable actions or events.
• We develop a robust graph-based object position-
ing algorithm in order to handle constraints be-
tween the scene objects.
• We support dynamic actions by defining action
schemas (preconditions, execution mechanisms,
and termination conditions). We use steering be-
haviors to implement navigation of the actors in
the scene.
The rest of this paper is organized as follows. Sec-
tion 2 presents related work. Section 3 details our
methodology. Section 4 evaluates the system using
a variety of techniques. Finally, Section 5 concludes
the paper and summarizes future work.
2 RELATED WORK
Both NLP and Computer Graphics have recently seen
rapid progress, but their integration when it comes to
story visualization has not been extensively studied.
Our work resides in this common intersection.
Information extraction is a crucial part of story
visualization systems in order to extract visualiz-
able elements from the story such as actors, actions,
etc. ClausIE (Corro and Gemulla, 2013) and OL-
LIE (Mausam et al., 2012) are open information
extraction systems that are used to extract triplets
(subjects, verbs, and objects) from text. However,
these systems do not generalize well to story text as
they have been developed using factual texts such as
Wikipedia. He et al. (He et al., 2017) use semantic
role labeling for information extraction, but this sys-
tem is trained on a news dataset, a far domain from
stories. This urged the need to build our own infor-
mation extraction system that is especially designed
to handle stories.
Several similar solutions (Ma, 2002; Moens et al.,
2015; Marti et al., 2018; Gupta et al., 2018) have
been proposed to convert stories into animated videos.
However, our system is different from them in sev-
eral ways. CONFUCIUS (Ma, 2002) supports actors
and actions only, but it focuses more on language to
humanoid animation. MUSE (Moens et al., 2015) is
limited to a pre-determined graphical scene and does
not focus on scene generation. CARDINAL (Marti
et al., 2018) requires the input text to follow the stan-
dardized format of movie scripts, and it only consid-
ers subjects, verbs, and objects. Gupta et al. (Gupta
et al., 2018) developed a retrieval storytelling system
in which the system retrieves a short video from a
database to represent each sentence in the input story.
These short videos are then processed and concate-
nated to produce the final video. One downside of this
approach is being limited by the video frames stored
in the database and the nature of the input stories.
Other solutions have been proposed to convert text
into static 3D scenes or images using a variety of tech-
niques. These solutions include WordsEye (Coyne
and Sproat, 2001), Text2Scene (Tan et al., 2019), the
system proposed by Lee et al. (Lee et al., 2018), Sce-
neSeer (Chang et al., 2017), and the system intro-
duced by Chang et al. (Chang et al., 2014) which fo-
cuses on spatial relations between objects and infer-
ring missing objects in the scene. These systems are
limited to static scene generation, i.e., not dynamic or
animated as in the case of our system.
3 METHODOLOGY
Figure 1 shows the architecture of our proposed sys-
tem which is divided into an NLP pipeline and a
graphics pipeline. The story is entered as text. It is
then processed by the NLP pipeline which extracts
all the visualizable information. This information is
structured in a special format and fed into the graph-
ics pipeline. This pipeline handles loading the scene,
positioning objects in the scene, and applying the ap-
propriate animations. The following subsections ex-
plain the components of each pipeline in detail.
3.1 NLP Pipeline
This pipeline extracts the information that can be vi-
sualized and animated from the story text. This in-
formation represents objects, actors, positioning con-
straints, and events. Objects can have characteristics
such as color and shape. Actors can be described by
their gender, age, height, physical appearance, and
clothes. Positioning constraints define the spatial rela-
tions between objects and actors in the scene. Events
can be changes in the weather conditions, changes in
the emotions of the actors, or actions performed by
AnimaChaotic: AI-based Automatic Conversion of Children’s Stories to Animated 3D Videos
227

Figure 1: System Architecture.
the actors (sequentially or in parallel). The system
supports simple sentences as well as some forms of
complex sentences as explained later. In addition, it is
assumed that the whole story takes place in the same
location (i.e., same scene with no scene transitions).
3.1.1 Extracting Objects, Properties, and
Constraints
Using the input text, the system extracts the physical
objects, their properties, and their constraints:
• Extract the objects by first finding all the nouns
using a Part-Of-Speech (POS) tagger. Then,
among these nouns, physical objects are identified
using the WordNet database (Miller, 1995).
• Identify the properties of each object. These types
of properties are supported: count, color, hair and
eye color (for humans), shape (e.g., tall, short,
thin, and fat). This is achieved by identifying the
noun phrase of each noun (if exists), then extract-
ing any existing properties from the noun phrase.
• Discover the constraints between the objects by
identifying the prepositions (e.g., on, below, and
behind) and their relevant objects.
3.1.2 Event Extraction and Ordering
Sentence Simplification and Classification: This
is responsible for converting complex and compound
sentences into simple sentences. We require that the
sentence has either one or two events only. This re-
quirement was largely put in place due to ambiguity
introduced when a sentence contains three or more
events. Consider for example: “John ate a burger af-
ter Sam hugged the kitten before the kitten purred.”
In this example, it is ambiguous whether John ate
the burger before the kitten purred or whether Sam
hugged the kitten before the kitten purred. There is
a similar ambiguity at the “after” keyword. Allowing
only simple sentences with fewer than three events re-
moves this source of ambiguity.
Then, we classify sentences based on their main
verbs into action and non-action sentences using
VerbNet (Schuler and Palmer, 2005). Verbs can be ac-
tion or non-action depending on their context, so we
can not rely solely on VerbNet, especially when us-
ing verbs describing actions in progress such as start,
stop, and begin. For example, start is a non-action
verb, but the sentence “He started to play football.”
is an action sentence since start implies the begin-
ning of an action. Action sentences are then further
processed by the Action Extraction component as ex-
plained later. Non-action sentences are then further
processed by the Weather Extraction and Emotion Ex-
traction components as explained later.
Action Extraction: Using the input text, the sys-
tem extracts all the actions that can be visualized
and identifies all their relevant information. This is
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
228

Table 1: Action Extraction: The information that can be extracted for a single action, how this information can be found in
the text, and some simple real-life examples. Prepositional objects are classified into different categories (e.g., location and
physical object) using a named entity recognition model and a knowledge base.
Extracted Information Representing Rule Example
Action Verb The boy ran to his mother.
Actors performing the action
Subject The boy ran to his mother.
Prepositional object representing an
actor
The boy ran with his sister to his
mother.
Objects or actors affected by
the action
Object The boy was eating a sandwich.
Indirect object The boy gave his mother a flower.
Positional constraints of the ac-
tors during the action
Prepositional object of a location-
based preposition
The boy was standing on the bed.
Destination or direction of the
action
Prepositional object of a motion
verb
The boy ran to his mother.
Emotions of actors during the
action
Adjective The happy boy was playing.
Adverb The boy was playing happily.
Prepositional object representing
emotions
The boy was playing with joy.
Instruments used to perform the
action
Prepositional object representing a
physical object
The boy was playing with the ball.
achieved by first using a POS tagger to assign tags
(e.g., noun, verb, or conjunction) to all the individ-
ual words. Then, non-action verbs that can not be
visualized (e.g., breathe and smell) are identified us-
ing VerbNet in order to be ignored in the visualization
process. Sentences with action verbs, on the other
side, are further processed to identify all the relevant
information about their actions. Table 1 lists the infor-
mation that can be extracted for a single action, how
this information can be found in the text, and some
simple real-life examples. Compound subjects, ob-
jects, and verbs are supported as well. A compound
subject consists of multiple subjects performing the
same action (e.g., Mary, John, and Alice were play-
ing with the ball.). A compound object consists of
multiple objects being acted upon (e.g., Mary was car-
rying an apple and an orange.). The same applies to
the compound verb which represents multiple actions
performed by the subject. Most rule-based informa-
tion extraction systems that we tested (ClausIE and
OLLIE) do not handle these cases, but our system
handles this by following conjunctions to find the ac-
tual POS using the sentence’s dependency parse tree.
Complex sentences are also supported. For ex-
ample, consider this sentence: “John and Mary were
playing happily with the ball, in front of Sally, in the
afternoon.” This information is extracted:
• Action: play
• Actors: John and Mary
• Affected Object: ball
• Positional Constraints: in front of Sally
• Emotions of Actors: happily
A special kind of action is when characters com-
municate with each other in the story. For this, we
use some techniques to detect the conversations, and
the speakers are detected as explained earlier. Quotes
(when they exist) are used as a strong feature to de-
tect the speech segments. In the absence of quotes,
we develop some rules that are based on the parse tree
of the sentence. Verbs implying speech (e.g., say and
shout) and the first succeeding non-speech verb (if ex-
ists) are detected. Afterwards, the sentence is split at
the subject associated with the non-speech verb. For
example, in the sentence “John said that the weather
is fine.”, the sentence is split at “the weather” and
“the weather is fine” is used as the extracted speech
segment. In case that a non-speech verb appears be-
fore the speech verb, the split is done at either the
speech verb if its subject appears afterwards (e.g., The
weather is fine, said John.), or at the speech verb’s
subject if the subject appears before the verb (e.g.,
The weather is fine, John noted.).
Verbs can have different meanings based on their
context. For example, run at “John was running
the factory.” means manage, but it implies motion at
“John was running with his sister.”. Another example
is that jump is an action verb at “John was jumping.”,
but it is a non-action verb at “The club was jumping
with music.”. To handle these cases, we develop some
linguistic rules for common verbs to handle their dif-
ferent meanings. For example, run could only imply
motion in case it occurs as an intransitive verb.
Weather Extraction: From the input text, the sys-
tem detects weather-related words using WordNet.
AnimaChaotic: AI-based Automatic Conversion of Children’s Stories to Animated 3D Videos
229

For each detected word (and all its synonyms), the
system queries a knowledge base to categorize the
weather conditions into one of the following sup-
ported categories: sunny, windy, rainy, snowy, foggy,
and cloudy. The system detects weather conditions
whether they apply to the entire story (e.g., It was a
sunny day.) or they occur in the middle of the story
(e.g., Then, it suddenly rained.).
Emotion Extraction: Some emotions are not re-
lated to a certain action (e.g., He got angry.), hence
they are not handled during action extraction. These
emotions are extracted as follows: i) Use a POS tag-
ger to extract nouns, adverbs, and adjectives. ii) Ex-
tract the synonyms of these words using WordNet.
iii) Determine if each word or any of its synonyms
is emotion-related or not using a knowledge base.
iv) Categorize each word into six categories using an
emotion lexicon: fear, joy, anger, surprise, disgust,
and sadness.
Event Ordering: After extracting events (weather
change, emotion change, and actions) from the story,
we need to determine their chronological order. Nor-
mally, we assume that the story events are sequen-
tial unless special keywords appear. We use keywords
such as “then” and “after” to determine the correct se-
quential order of events. Additionally, keywords such
as “while”, “when” and “at the same time” are used
to determine action parallelism. For compound sen-
tences, if the actors in the sentence are different, their
actions are considered as parallel actions. An exam-
ple of these types of sentences is: “John was playing
football in the garden, and Mary was singing.”. If the
sentence has one actor doing multiple actions, these
actions are considered sequential.
3.1.3 Scene Identification
The system identifies the general scene of the story
among the following currently supported scenes:
house, street, farm, beach, and garden (could easily
support more in the future). The scene can be ex-
plicitly mentioned in the story or implied by the ob-
jects and actions. The system identifies the scene
in both cases. If it is explicitly mentioned, the sys-
tem uses rule-based techniques to identify the scene
and exclude scenes mentioned in speech sentences or
negated sentences. If it is not explicitly mentioned,
the probability of each scene is calculated based on
the objects and the actions found in the story, return-
ing the most likely scene. We use the Naive Bayes
classifier 1 to find the probability of each scene given
the probabilities of having these objects and actions
in this particular scene as follows:
argmax
k
P(S
k
|Story) = argmax
k
P(S
k
)
N
∏
i=1
P(Word
i
|S
k
)
(1)
where S
k
is the scene k, P(S
k
|Story) is the probabil-
ity of scene k given the words in the story, P(S
k
) is
the probability of each scene k, which is assumed to
be uniform for all scenes, P(Word
i
|S
k
) is the condi-
tional probability of the occurrence of each word in a
given scene k (built by scrapping the Internet to find
the possibility of having different objects and actions
in different scenes).
3.2 Graphics Pipeline
To achieve modularity and to allow integration of
more advanced NLP or graphics pipelines in the fu-
ture, we develop a flexible and extendible represen-
tation that captures all the details in the input story.
This representation is passed from the NLP pipeline
to the graphics pipeline, and it includes:
• Identified scene, e.g., garden or room.
• Weather information, e.g., sunny or rainy.
• Time of the day, e.g., day or night.
• Static objects (e.g., cup), their counts and colors.
• Actors (i.e., objects that can move, e.g., boy or
dog) and their hair and eye colors.
• Positional constraints (e.g., beside or above) be-
tween the objects and the actors in the scene.
• Actions where each action can be:
– Single: An action performed by a single actor.
– Aggregate: An action performed by a group of
actors together, e.g., dancing. The verb associ-
ated with each action (single or aggregate) can
be: a verb with no objects (e.g., run), a verb
with direct objects, or a verb with direct and in-
direct objects.
– Event: Represents changes in weather condi-
tions (e.g., It suddenly rained.) or actors’ emo-
tions (e.g., He became sad.).
– Parallel: A set of actions (single, aggregate, or
event) that are happening at the same time. For
example, the boy was running while the girl
was eating.
The Graphics module is responsible for rendering
the scene video in a way that captures all this infor-
mation. It achieves this as follows:
1. Load a terrain based on the scene location. For
example, a grassy terrain should be used if the lo-
cation is a garden.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
230

2. Load a background depending on the scene loca-
tion, time, and weather details.
3. Generate the static scene:
• Select actors such that they satisfy their gen-
ders, ages, and properties (e.g., hair color).
• Use our proposed object positioning algorithm
to position the objects and the actors in the
scene such that they satisfy their initial posi-
tional constraints.
4. Animate the scene by moving the actors around:
• Select the appropriate animations based on the
given actions such as walking and running.
• Use AI behaviors (e.g., moving to a point while
avoiding obstacles) to execute the actions.
3.2.1 Static Scene Setup
The graphics pipeline starts by retrieving the main
scene elements from the database in order to setup
the static scene. Our database contains a set of back-
ground images for each scene type satisfying different
times of the day such as morning and evening. It also
contains images for different terrains that are used as
textures for the ground plane. In addition to this, ob-
jects and actors are stored in the database along with
metadata that aids in their retrieval such as the type of
the object and the gender of the actor. An appropriate
scene background is chosen such that it satisfies the
identified scene and the time information. A suitable
terrain image is then selected according to the scene
type. We retrieve the objects from the database based
on their type and count, and we retrieve the actors
such that they satisfy their genders, ages and prop-
erties. The actors and objects are then positioned in
the scene according to our proposed algorithm that is
described in the next subsection.
3.2.2 Object Positioning
The main objective of the object positioning algo-
rithm is to place the input objects in the scene
such that they are all visible and the positional con-
straints between them are satisfied. Constraints are
either binary (i.e., between two objects, e.g., beside,
above, inside, or behind) or non-binary (i.e., among
a group of objects). The system handles both types
by converting non-binary constraints to a set of bi-
nary constraints between pairs of objects in the group.
Throughout our discussion, we will consider the x-
axis goes to the right of the screen, the y-axis goes
into the screen, and the z-axis is the upwards axis.
Algorithm 1 shows the details of the object posi-
tioning algorithm which works as follows:
1. Pre-process constraints by excluding unsupported
ones and converting non-binary constraints to bi-
nary ones as explained above.
2. Place objects with no imposed constraints in ran-
dom visible positions.
3. Build an undirected graph with the vertices repre-
senting the constrained objects and the edges rep-
resenting the XY constraints between them.
4. Find the list of Strongly Connected Components
(SCC) in the graph using Depth-First Search.
Each SCC represents a group of objects with XY
constraints among them. Objects are distributed
in a 2D array that reflects these constraints (same
row: beside, same column: in front or behind).
5. Build a directed graph with the nodes representing
the SCCs and the edges representing the Z con-
straints. In the graph, a parent SCC should be po-
sitioned below the child SCC according to their Z
constraints.
6. Perform topological sort on that directed graph in
order to always have each parent SCC before its
children. This allows the system to position the
parent SCCs first then their children due to their Z
positional dependency.
7. Position SCCs and objects:
• Each SCC is treated as a single unit when posi-
tioned in the scene.
• Position the SCC whether it is depending on an
earlier SCC or not.
• Within each SCC, position all objects while sat-
isfying their XY constraints.
8. Perform any necessary scaling to the objects such
that the objects placed inside other objects fit
within them.
3.2.3 Scene Animation
Animating the scene is realized by executing the ac-
tions in the appropriate chronological order. Each ac-
tion can either be: single, aggregate, event, or any of
these in parallel. Single actions can have any of the
following types: walk, wander, sit, drink, eat, jump,
fall down, run, pick, say, exercise, punch, dance, give,
and bark. These types cover a wide variety of visual-
izable actions that are extracted by the NLP module
and can be easily extended as all of them share the
same interface. Each action has a precondition, an
execution mechanism, and a termination condition.
AnimaChaotic: AI-based Automatic Conversion of Children’s Stories to Animated 3D Videos
231

Algorithm 1: Object Positioning Algorithm.
Input: Objects and their positional
constraints
Output: Objects’ 3D coordinates
foreach constraint in constraints do
if constraint is supported then
Include constraint to be applied;
Convert to binary constraint if
applicable;
else
Exclude constraint;
end
end
foreach object in unconstrained objects do
Set X, Y, Z to a random visible location;
end
graph1 = Graph(nodes=objects,
edges=XYconstraints);
SCC = findConnectedComponents(graph1);
graph2 = Graph(nodes=SCC,
edges=Zconstraints);
orderedComponents =
topologicalSort(graph2);
foreach component in orderedComponents
do
positionComponent(component);
end
foreach object in objects do
scale(object, object constraints);
end
• The precondition is required to start executing
the main action. For example: i) To give an ob-
ject to an actor, a precondition would be to pick
the object. ii) To pick an object, a precondition
would be to walk towards the location in which
the object exists in the scene. iii) To walk towards
an object, the actor must be in a standing posture
(not sitting on a chair for example).
• The execution of the action is mainly playing
a representative animation until the termination
condition is met. For actions such as walk, run,
and wander, the execution requires the invocation
of steering behaviors that ensure the smooth navi-
gation of actors in the scene. For actions that im-
ply speech such as say and talk, we use a third-
party text-to-speech service to allow our actors to
speak in voices that reflect their gender. We also
display the speech text in speech bubbles above
the actor. For actions such as bark and meow that
are usually associated with animal actors, we play
animal voices to make the story more lively.
• The termination condition marks the end of ac-
tion execution by the actor. For example, for the
pick action, the termination condition is that the
actor has the object in his grip. For some actions
such as wander, it may be difficult to have a clear
termination condition. For this, we define the ter-
mination condition as a time interval after which
the action should stop executing.
For aggregate actions that are being performed by
multiple actors, the system replicates the single action
for all the actors. Events are classified into weather
change and emotion events. For weather change,
rainy and snowy are simulated using particle effects,
and cloudy is simulated by randomly moving cloud
models. To support a wide variety of emotions in a
way that is easily extendible and to ensure that they
are supported for the different types of actors, we use
the idea of emojis which are popular in chatting appli-
cations to express emotions. Emojis are loaded above
the actor in order to indicate the desired emotion.
The navigation of the actors around the scene is
achieved by implementing Reynolds’ steering behav-
iors (Reynolds, 1999) which determine the naviga-
tion path while not making assumptions about the
scene or the actors. These steering behaviors assume
point mass approximation where an object is treated
as a point with finite mass and negligible dimensions.
Each object is characterized by a velocity that is mod-
ified by applying a force. Treating objects as points
allows us to simplify the calculations and to handle
the motion of a wide variety of models independent
of their dimensions. Each steering behavior is imple-
mented by calculating a vector representing the de-
sired steering force. We implement three behaviors:
• Seek is concerned with moving towards a point.
• Wander is a type of random steering imple-
mented by generating random forces to simulate
the wandering behavior of the actors in the scene.
• Obstacle Avoidance is concerned with generat-
ing forces that allow the actor to steer away from
nearby objects.
The steering behaviors are combined to generate more
complex behaviors. For example, to allow an actor to
move towards a target without hitting objects, we cal-
culate the weighted average of the seek and obstacle
avoidance forces.
3.2.4 Object Database and Graphics Tools
We collect a database of models from various online
sources and use MongoDB
2
to store metadata about
2
https://www.mongodb.com
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
232

(i)
(ii)
(iii)
Figure 2: Visual comparison between AnimaChaotic (bottom row) and WordsEye (top row) using different scenes. i) Ani-
maChaotic produces a clear view of all the objects compared to WordsEye in which the four children are very small. Text:
“There were two tall trees. There was a bird sitting on the tree. There were four boys in the garden.” ii) AnimaChaotic infers
the scene (i.e., room) from its objects (e.g., table and chair) while WordsEye does not. Text: “The food was on the table. John
has brown hair. The chair was in front of his computer.” iii) AnimaChaotic infers the scene (i.e., street) from its objects (e.g.,
car) while WordsEye does not. Text: “A dog is next to the boy. A car is in front of the boy.”
the objects. Mongo is a NoSQL document database.
It has the advantage of being schema-less and thus we
can save specific information about each object with-
out adhering to the constraints that are usually im-
posed by structural databases. The metadata includes:
the type of object, its dimensions, and the names of
the animations it supports. This allows us to retrieve
the objects accurately and scale them relative to each
other. We handle the color property of the object by
loading different textures when they exist. For sup-
porting multiple animations, we use Mixamo
3
that al-
lows us to fit a fully rigged skeleton to the humanoid
models we have and generate different animations for
each model. We also use Mixamo’s free models to
expand our database with more models. We support
more than one model for each object category to allow
our scenes to be more versatile. We use the Panda3D
4
game engine for rendering of the scene.
4 EVALUATION
This section evaluates the system in several ways: ac-
curacy of NLP information extraction, the accuracy
3
https://www.mixamo.com/
4
https://www.panda3d.org
Table 2: Precision and recall of extracting different infor-
mation from eleven stories.
Extracted Information Precision Recall
Scene 100% 100%
Actor 98.98% 100%
Emotion 100% 100%
Action 100% 98.41%
Direct Object 100% 97.17%
Indirect Object 100% 96.36%
of scene generation and object positioning compared
to WordsEye, end-to-end human evaluation, and com-
parison to similar solutions in terms of supported fea-
tures. We choose WordsEye for our experiments be-
cause it is the only similar solution that allows users
to try their system online.
NLP Information Extraction: Eleven simple sto-
ries were used to evaluate the system in terms of the
precision and recall of the extraction of the scene, ac-
tors, emotions, actions, direct objects, and indirect ob-
jects. Table 2 presents the results which show that the
system is both accurate and robust when tested with
unseen stories.
Scene Generation and Object Positioning: Nine-
teen stories were used to evaluate the system against
WordsEye. Those stories were selected to satisfy the
AnimaChaotic: AI-based Automatic Conversion of Children’s Stories to Animated 3D Videos
233
requirements of WordsEye since it supports generat-
ing static scenes only, and does not visualize the dy-
namic actions. It also requires simple sentences that
follow a certain structure. Figure 2 shows a visual
comparison between our system and WordsEye using
different scenes.
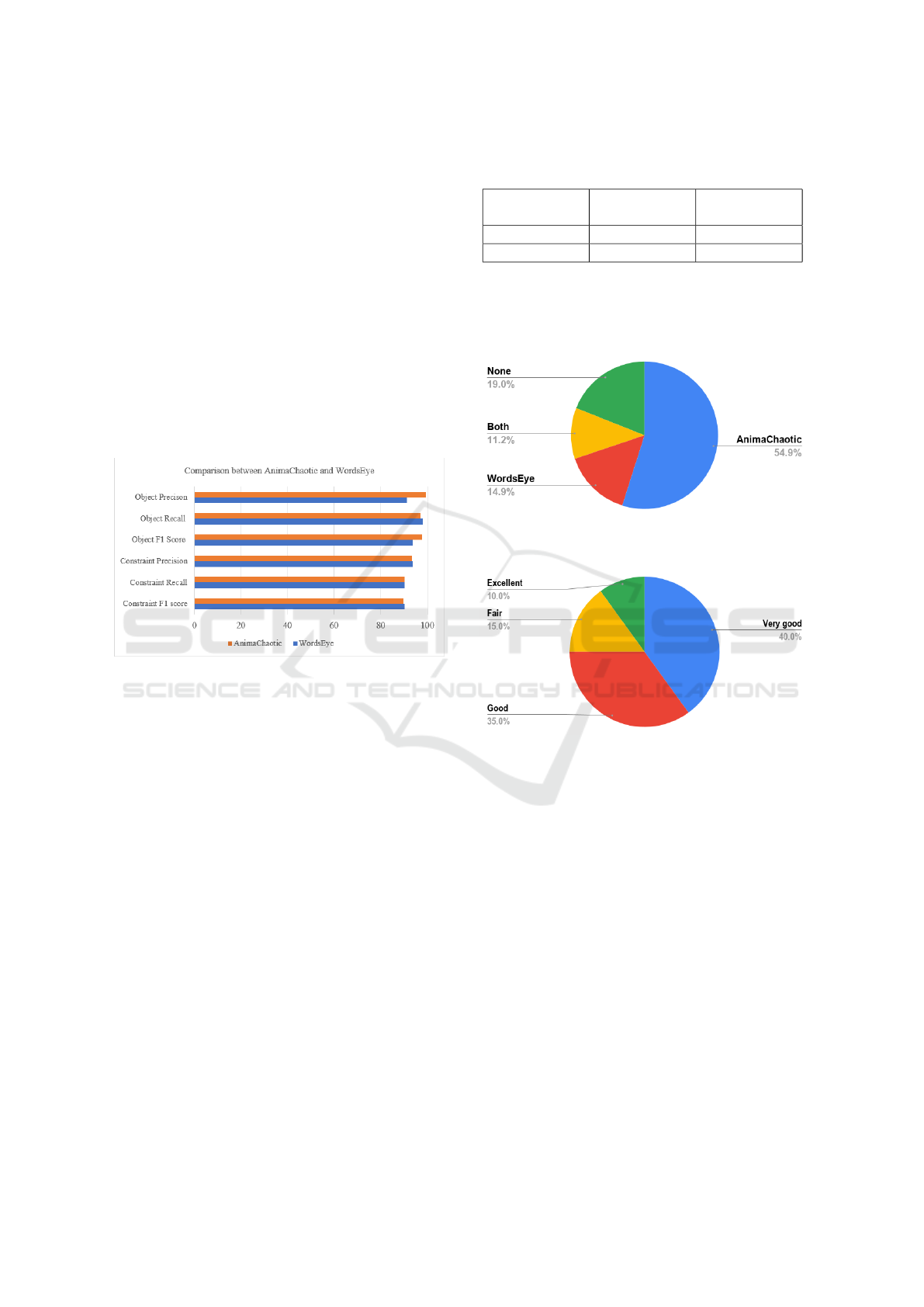
Figure 3 evaluates the two systems in terms of pre-
cision, recall, and F1 score of object extraction and
constraint satisfaction. To calculate precision and re-
call, true positives are the objects or constraints that
are mentioned in the story and visualized in the out-
put. False positives are the objects or constraints that
are incorrectly visualized in the output. False nega-
tives are the objects or constraints that are mentioned
in the story, but not visualized in the output. The fig-
ure shows that our system performs better in terms of
object precision and object F1 score.
Figure 3: Precision, Recall and F1 scores for objects and
constraints satisfaction for AnimaChaotic and WordsEye.
Table 3 compares the two systems in terms of
scene choice accuracy for which our system greatly
outperforms WordsEye due to the technique described
in section 3.1.3 (using Naive Bayes to infer the scene
based on its objects if the scene is not explicitly men-
tioned in the text). In addition, the table compares the
two systems in terms of color satisfaction accuracy
which means the ability of the system to satisfy the
colors of the objects mentioned in the story. Words-
Eye performs better as it has a wider support for tex-
tures for different objects.
Human Evaluation: Evaluating visual information
can be very subjective. That is why we also eval-
uate our system by human audience. Two surveys
were used for evaluation: i) Figure 4 shows the re-
sults of the first survey which presents output images
from 10 stories from our system and WordsEye. For
each story, the survey asks “Which image is more ac-
curate and visually acceptable?”. ii) Figure 5 shows
the results of the second survey which presents output
videos from 4 stories from our system. For each story,
the survey asks “To which extent the output matches
Table 3: Comparison between AnimaChaotic and Words-
Eye in terms of color accuracy and scene choice accuracy.
System Color Accu-
racy
Scene Choice
Accuracy
AnimaChaotic 91.25% 90%
WordsEye 94.38% 55%
the text?”, and the possible answers are: Excellent,
Very Good, Good, Fair, and Poor. The two surveys
show that the output from our system is visually ac-
ceptable to the audience.
Figure 4: Human evaluation of AnimaChaotic’s output and
WordsEye’s output.
Figure 5: Human evaluation of AnimaChaotic’s generated
videos.
Supported Features: Table 4 compares our system
to the similar solutions in terms of supported features
such as object extraction, scene identification, emo-
tion extraction, etc. This shows that our system sup-
ports the most features.
5 CONCLUSION
This paper proposes AnimaChaotic, a system that
generates video illustrations from childrens’ stories.
AnimaChaotic leverages NLP and computer graphics
and introduces a pipeline that extracts visualizable in-
formation from the story text and presents it in the
form of an animated 3D video. AnimaChaotic was
tested on a set of stories that we devised as well as
adapted from actual visual stories on the Internet. Our
experiments show that our proposed system is com-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
234
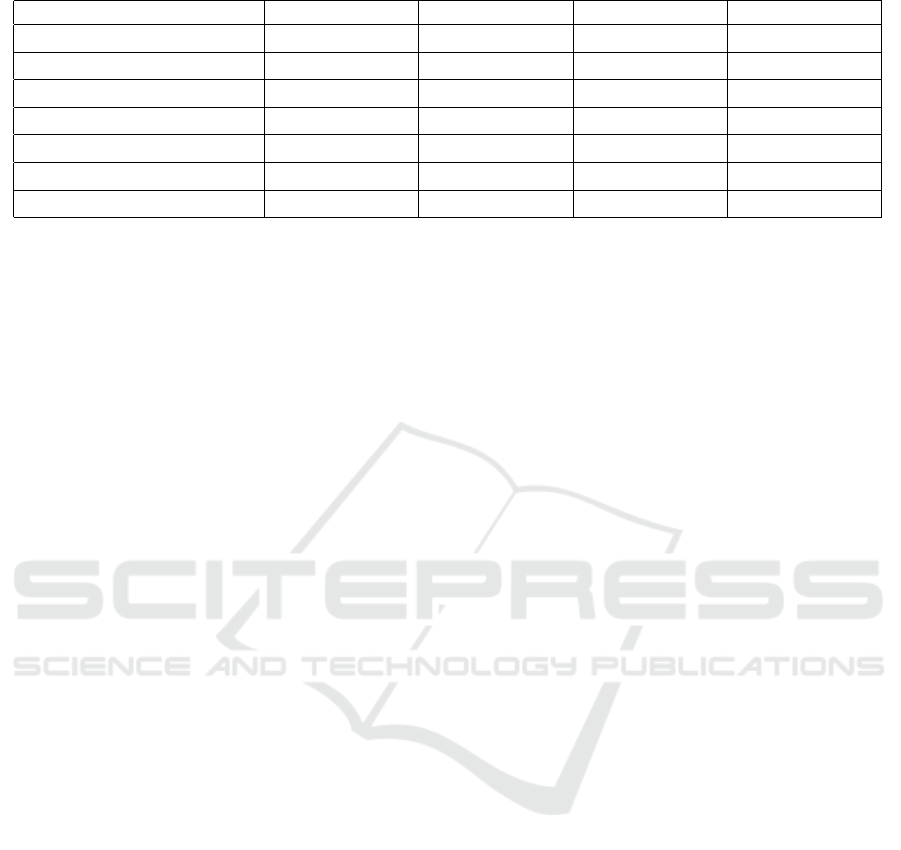
Table 4: Comparison between AnimaChaotic and similar solutions in terms of supported features.
AnimaChaotic WordsEye MUSE CONFUCIUS
Object extraction ! ! ! !
Scene identification ! ! — —
Animation ! — ! !
Emotion extraction ! — — !
Positioning constraints ! ! — —
Weather extraction ! — — !
Interactive — ! ! —
petitive with existing solutions. A human evaluation
of the system emphasizes that its output is visually ac-
ceptable and matches the text to a great extent. In the
future, AnimaChaotic can be improved to take into
account long term dependencies between sentences.
AnimaChaotic can also be extended to support multi-
ple scenes within the same story.
REFERENCES
Chang, A. X., Eric, M., Savva, M., and Manning, C. D.
(2017). SceneSeer: 3D scene design with natural lan-
guage. ArXiv, abs/1703.00050.
Chang, A. X., Savva, M., and Manning, C. D. (2014).
Learning spatial knowledge for text to 3D scene gen-
eration. In Proceedings of the Conference on Empiri-
cal Methods in Natural Language Processing.
Corro, L. D. and Gemulla, R. (2013). ClausIE: clause-based
open information extraction. In Proceedings of the
International Conference on World Wide Web.
Coyne, B. and Sproat, R. (2001). WordsEye: An automatic
text-to-scene conversion system. In Proceedings of
the Conference on Computer Graphics and Interactive
Techniques.
Gupta, T., Schwenk, D., Farhadi, A., Hoiem, D., and Kemb-
havi, A. (2018). Imagine this! scripts to compositions
to videos. In Proceedings of the European Conference
on Computer Vision.
He, L., Lee, K., Lewis, M., and Zettlemoyer, L. (2017).
Deep semantic role labeling: What works and what’s
next. In Proceedings of the Annual Meeting of the
Association for Computational Linguistics.
Lee, D., Liu, S., Gu, J., Liu, M.-Y., Yang, M.-H., and Kautz,
J. (2018). Context-aware synthesis and placement
of object instances. In Proceedings of the Interna-
tional Conference on Neural Information Processing
Systems.
Ma, M. E. (2002). Confucius: An intelligent multime-
dia storytelling interpretation and presentation system.
First Year Report, School of Computing and Intelli-
gent Systems, University of Ulster, Magee.
Marti, M., Vieli, J., Wito
´
n, W., Sanghrajka, R., Inversini,
D., Wotruba, D., Simo, I., Schriber, S., Kapadia, M.,
and Gross, M. (2018). Cardinal: Computer assisted
authoring of movie scripts. In Proceedings of the In-
ternational Conference on Intelligent User Interfaces.
Mausam, Schmitz, M., Soderland, S., Bart, R., and Etzioni,
O. (2012). Open language learning for information
extraction. In Proceedings of the Conference on Em-
pirical Methods in Natural Language Processing and
Computational Natural Language Learning.
Miller, G. A. (1995). Wordnet: a lexical database for en-
glish. Communications of the ACM, 38(11):39–41.
Moens, M.-F., Do Thi, N. Q., Kordjamshidi, P., and Lud-
wig, O. (2015). Visualising the content of a text in a
virtual world. In Kultur und Informatik: Cross Media,
pages 33–37. Verlag Werner H
¨
ulsbusch.
Reynolds, C. W. (1999). Steering behaviors for autonomous
characters. In Game Developers Conference.
Schuler, K. K. and Palmer, M. S. (2005). VerbNet: A broad-
coverage, comprehensive verb lexicon. University of
Pennsylvania.
Tan, F., Feng, S., and Ordonez, V. (2019). Text2Scene:
Generating compositional scenes from textual de-
scriptions. In Proceedings of the Conference on Com-
puter Vision and Pattern Recognition.
AnimaChaotic: AI-based Automatic Conversion of Children’s Stories to Animated 3D Videos
235
