
Towards Robust Continual Learning using an
Enhanced Tree-CNN
Basile Tousside, Lukas Friedrichsen and J
¨
org Frochte
Bochum University of Applied Science, 42579 Heiligenhaus, Germany
Keywords:
Tree-CNN, Continual Learning, Deep Learning, Hierarchical Classification, Robust.
Abstract:
The ability to perform continual learning and the adaption to new tasks without losing the knowledge already
acquired is still a problem that current machine learning models do not address well. This is a drawback, which
needs to be tackled for different reasons. On the one hand, conserving knowledge without keeping all of the
data over all tasks is a rising challenge with laws like the European General Data Protection Regulation. On
the other hand, training models come along with CO
2
footprint. In the spirit of a Green AI the reuse of trained
models will become more and more important. In this paper we discuss a simple but effective approach based
on a Tree-CNN architecture. It allows knowledge transfer from past task when learning a new task, which
maintains the model compact despite network expansion. Second, it avoids forgetting, i.e., learning new tasks
without forgetting previous tasks. Third, it is cheap to train, to evaluate and requires less memory compared
to a single monolithic model. Experimental results on a subset of the ImageNet dataset comparing different
continual learning methods are presented.
1 INTRODUCTION
Continual learning (CL) is a key characteristic of hu-
man intelligence, which remains a daunting problem
in machine intelligence. It refers to the ability of a
neural network to learn consecutive tasks, crucially,
without forgetting how to perform previously learned
tasks.
Unfortunately, the term continual learning is
sometimes used for a wide range of ideas of learning
continually, incrementally and adaptively. In general,
it means that the predictive model is able to smoothly
update, take into account different tasks and data dis-
tributions, while still being able to keep useful knowl-
edge and skills over time. This broad description can
mean dealing with very different tasks like learning
from a stream of different data distributions or just
reusing neural networks in a context one might refer
to as transfer learning. In this paper we concentrate
on classification. We denote F as the feature space
and C as the target space of classes. In this context,
the goal of a CL method is to deal with a sequence of
tasks, each containing a classification task T
t
T
t
: F → C
t
⊃ C
t−1
In other words, the set of classes always grows from
task to task and still contains the old classes as sub-
sets. Training on task t is performed using a dataset
D
t
. Therefore, without further modification in train-
ing, a naively trained neural network tends to over-
write its current weights, causing a replacement of
knowledge about older tasks with the current tasks.
This phenomenon is known to as the catastrophic for-
getting problem (Goodfellow et al., 2013).
Beyond continual learning we discuss the aspect
of robustness in the sense that not all misclassifi-
cations are equal. If classes belong to hierarchical
structures, some of these classes are more related to
each other than others. It is much more acceptable
to misclassify a bee as wasp than as an elephant. A
lot of tasks can be or even are inherently structured
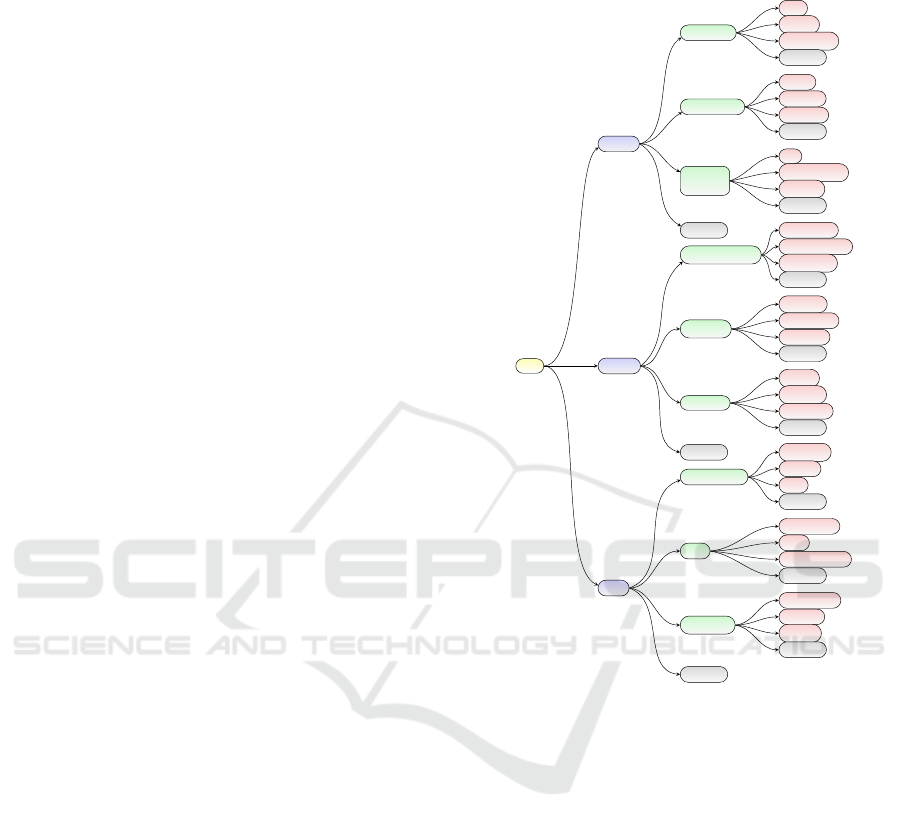
in trees, like the ones in Figure 1 – which will be
used throughout the paper – derived as subset of
ImageNet (Russakovsky et al., 2015). The role
of not here (in Figure 1) is explained later on
and these nodes can be ignored for now. As the
figure shows, we have trees with different levels
L
l
with l ∈ {0, ··· ,3}, where L
0
is the root-node,
while L
1
= {animal,arti f act, f ood} is level 1.
Nodes in the deeper levels are denoted as L
2,m
,
e.g. L
2,0...2
= {vertebrate, invertebrate, domestic
animal}. L
3,n
= {bird, reptile, amphibian} with
n = 0, ... ,2, represents child of vertebrate in the
deepest level L
3
. This scheme can be extended more
and the extension can also be performed unbalanced.
316
Tousside, B., Friedrichsen, L. and Frochte, J.
Towards Robust Continual Learning using an Enhanced Tree-CNN.
DOI: 10.5220/0010819800003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 316-325
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

In this way, the next task could be just to go deep
regarding birds.
There is a plethora of areas where the application
of such a hierarchical sequential learning comes into
play. Although a traditionally trained neural network
performing joint learning – i.e., accessing all data at
one during training – is in general more promising
in terms of accuracy, this is not always possible or
desired in some real-world scenarios, including but
not limited to:
• Certification, e.g. w.r.t. occupational safety in a
smart factory.
• Green AI, along with the accompanying need for
model reuse.
• Data protection and privacy.
Employing machine learning in real life produc-
tion with the risk of human harm or strict quality reg-
ulations - cf. e.g. the ISO 9000 family - comes up
with huge demand regarding rigorous a priori testing
of the model in different settings. Such settings in-
clude additional software solutions around the model
to prevent statistical unlikely but not impossible be-
havior. Smoothly chaining the model such that it is
composed of interlinked, but individually indepen-
dent node partly alleviates this issue by reducing the
size and number of components to be re-evaluated if
a partial change to the database occurs.
The second challenge concerns the aspect of
Green AI (see e.g. (Schwartz et al., 2020)), trying to
prevent unnecessary usage of energy for training pur-
pose. Moreover, in real-world applications like au-
tonomous systems (e.g. autonomous units like robots
or cars), access to computer resources is highly lim-
ited. Hence, restricting the training to necessary level
of new applications is a strongly desired behavior.
In both of the aforementioned scenarios (Certifica-
tion and Green AI), there is always the – although un-
desirable – option to abandon the existing model and
start the training from scratch since the old data are
usually still available. This is however not the case,
when the latter is subject to contemporary privacy and
data protection legislation. One prominent example is
the adoption of the General Data Protection Regula-
tion (GDPR) by the European Union in 2018, which
makes high demands on data protection and privacy
including the requirement to delete data after a given
amount of time. In a similar vein, the California Con-
sumer Privacy Act enacted in 2020 promotes the need
to continually delete consumer processed data over
time.
In such scenarios, it is inherently necessary to in-
crementally build upon the existing model (as done
in our method), since old data are either non-existent
(has been deleted) or not accessible due to privacy
concern, making retraining from scratch practically
unfeasible. In this paper, we propose a novel method
termed as enhanced Tree-CNN to address the contin-
ual learning problem aimed at overcoming the afore-
mentioned problematic.
1.1 Related Work
Previous works addressing continual learning gen-
erally fall under three categories: regularization-
based (Kirkpatrick et al., 2017; Jung et al., 2020),
replay-based (Shin et al., 2017; Riemer et al., 2019)
and architecture-based (Yoon et al., 2018; Li et al.,
2019). Our work belongs to the architecture-based
family and we only discuss this category. The reader
is referred to (Parisi et al., 2019) for an extensive sur-
vey.
Methods in architecture-based family sidestep
catastrophic forgetting by allocating non-overlapping
subsets of model parameters to each task. This is of-
ten achieved by dynamically expending the network
capacity (as in our approach) to handle a new task.
For instance, (Rusu et al., 2016) proposed to expand
the network by augmenting each layer by a fixed num-
ber of neurons for each new task, while keeping the
old layers parameters fixed to avoid forgetting. How-
ever, this method results in a network with excessive
size. (Yoon et al., 2018) proposed to overcome this
limitation by expending each layer with only the nec-
essary number of neurons, but they require several hy-
perparameters and involves cumbersome heuristics to
decide how many neurons to add at each layer. More
recently, (Li et al., 2019) developed a notion of net-
work architecture search to decide, how much to reuse
of the existing network neurons and how much to add.
This method makes the network very compact but is
not effective in term of training time due to the heav-
ily search mechanism.
The publication originating from a different point
of view by (Roy et al., 2020) employs tree-like, dy-
namically growing structures of neural networks. It
contains the basic idea we improve and furthermore
evaluate in our work, thus we discuss the basics
and improvements later on in more details. More-
over, we will show that our approach is scalable and
generic, making it applicable either as a standalone
continual learning method or in combination with a
regularization- or memory-based method.
Towards Robust Continual Learning using an Enhanced Tree-CNN
317
1.2 Contribution
This paper improves and evaluates a tree-like mod-
ular approach for learning sustainable convolutional
neural networks (CNNs) proposed in (Roy et al.,
2020). The improved version can handle an unlim-
ited number of tasks and avoid catastrophic forget-
ting. The main idea is to leverage neural network
modularization via building a tree-CNN in a bottom-
up fashion. This approach enhances continual learn-
ing and robustness. Beyond this, it can help to in-
crease the transparency in the decision-making pro-
cess, therefore it leads to the overall network be-
ing more trustworthy than a single monolithic model.
Another significant benefit of this tree-like modular-
ization scheme is the gained robustness of the net-
work with only minor drawbacks in terms of accuracy.
Nevertheless, tree-based approaches come along with
some limitations not discussed in (Roy et al., 2020).
The reason is that in (Roy et al., 2020) CIFAR-100
was used for benchmark problems. The issues mostly
show up in cases with more complex and unbalanced
tasks.
The main contributions of our work are summa-
rized as follows:
• We extend the algorithm from (Roy et al., 2020)
with the option of setbacks.
• We propose a lightweight full prediction approach
for Tree-CNNs.
• We propose a metric to measure errors in tree
structured datasets.
• We propose a subset of ImageNet as real life CL
classification benchmark.
• We evaluate the algorithm from (Roy et al., 2020),
our improved version, and EWC (Kirkpatrick
et al., 2017) on this benchmark.
• The latter discussion includes success conditions
for the different approaches.
The paper is organized as follows: Section 2
presents our improvements regarding (Roy et al.,
2020), while in Section 3 we suggest an additional
metric regarding robustness in structured datasets. Fi-
nally, Section 4 includes our suggestion for a bench-
mark problem taken from ImageNet as well as the re-
sults and discussion.
2 ENHANCED TREE-BASED CNN
bird
reptile
amphibian
not here
insect
mollusk
arachnid
not here
cat
working dog
toy dog
not here
instrument
motor vehicle
furnishing
not here
garment
floor cover
footwear
not here
bridge
housing
memorial
not here
beverage
dessert
dish
not here
edible fruit
seed
unedible fruit
not here
cruciferous
peppers
squash
not here
vertebrate
invertebrate
domestic
animal
not here
instrumentality
covering
structure
not here
alimentation
fruit
vegetable
not here
animal
artifact
food
root
Figure 1: Our proposed subset of the ImageNet Dataset.
Problem Setting. As mentioned earlier, we con-
sider the problem of sequential learning of deep con-
volutional neural network under the scenario, where
an unknown number of tasks with new sets of classes
and an unknown distribution of data are sequentially
provided to the network. Specifically, our goal is to
train a model for a sequence of tasks, where task t ar-
rives with dataset D
t
= {x
i
,y
i
}
I
t
i=1
, such that the final
model performs well on the new task as well as on
the previous tasks without considerable performance
loss.
Notations. We denote L
l
(l ∈ {0, ··· ,3}) as a level
of the tree, where L
0
and L
3
are the root and leaf
levels, whereas L
1
and L
2
stand for the task-specific
levels. Beyond this, let K, M be the number of
tasks on level L
1
,L
2
and N the number of leaf
nodes or classes in L
3
. We further denote by T ∈
{L
1,k
}
K
k=0
,{L
2,m
}
M
m=0
the set of all tasks in the
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
318
tree. Finally, M
k
denotes the number of children of
the k
th
task in L
1
, whereas N
m
stands for the number
of children of the m
th
task in L
2
.
Method Overview. Let’s consider a model trained
to tackle task 1, namely to classify images belonging
to K different classes (e.g. animal, artifact, food as in
Figure 1). This model can be viewed as the root node
(L
0
) of the entire tree-based CNN and its children as
the level 1 (L
1
) of the hierarchy. Each model in L
1
is further trained to differentiate between its children,
such that during a prediction, the tree can route sam-
ples to the corresponding next level nodes. The tree
structure is illustrated in Figure 1.
Performing evaluations with this approach, we
found that the root note is very important, because a
misclassification performed on its level is inevitable.
If – with a slightly higher probability – artifact has
been chosen incorrectly instead of animal, the predic-
tion will go wrong. This property is even worse, if
one considers continual learning instead of incremen-
tal learning as in (Roy et al., 2020). In incremental
learning, all the data are available to train e.g. the
root node. In the use case of continual learning, it
is possible that a tree-CNN is trained and below the
class bird new sub-classes are introduced. It might be
the case that the root model route the new bird images
correctly into the animal branch. But maybe one of
the new classes is penguin or ostrich. In this case, the
trained convolution layer might end up less efficient.
There are two strategies to make trees-approach – like
(Roy et al., 2020) – capable for continual learning.
One could retrain the root model with a technique,
e.g. EWC (Kirkpatrick et al., 2017), which is capa-
ble to avoid the catastrophic forgetting, or one could
introduce a setback mechanism deeper in the trees.
Of course, it is possible to combine both techniques.
We suggest to start with the introduction of a setback
mechanism and just go for retraining if setbacks are
not capable alone to handle the issue.
In Figure 1, for the setback, new classes not here,
labeled as gray nodes are introduced. These not here
classes are defined by using a given percentage of the
images from one level below. This means e.g. not
here at domestic animals consists of pictures from
the database except domestic animals. Doing so, the
model learns to recognize samples that do not belong
to its position in the hierarchy. This leads to a kind of
open world model, where not here is always the op-
tion that none of the given classes is the correct one,
in the example of domestic animals it is neither a cat,
working- or toy dog.
We observed that the proposed setback mecha-
nism – as briefly described above and more details
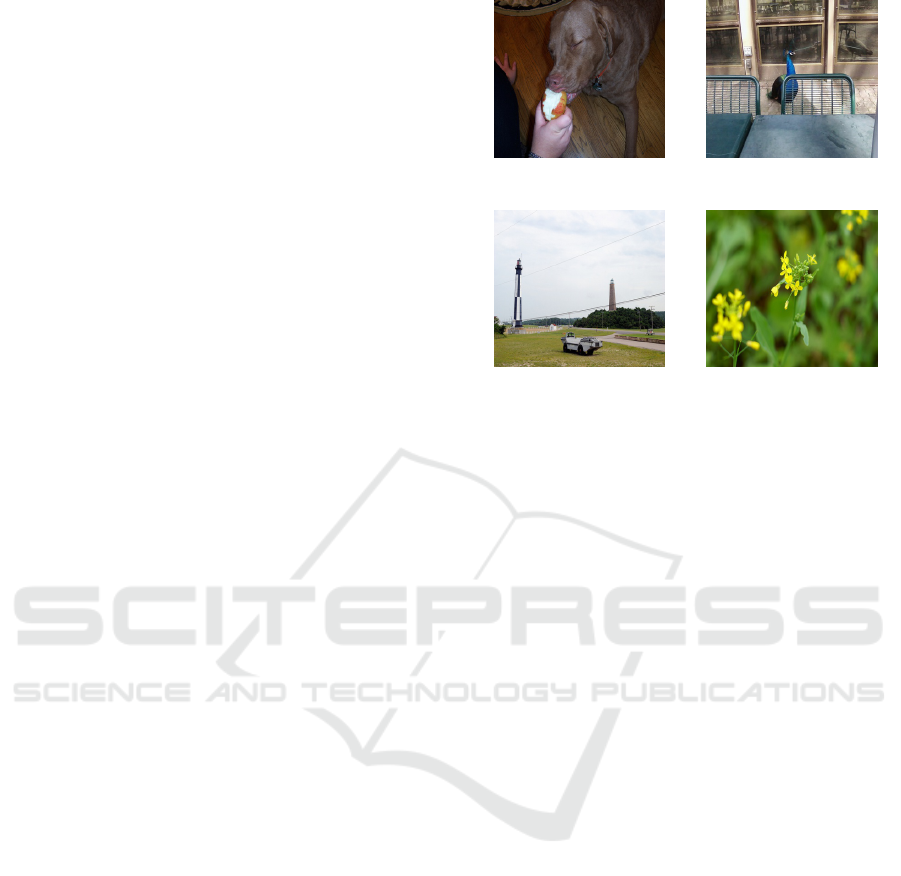
(a) Food - Dog (b) Structure - Bird
(c) Structure - Vehicle (d) Invertebrate - Seed
Figure 2: Illustration of test samples, which benefited from
the setback mechanisms to be correctly classified (right la-
bel in each image) after a first miss-classification (left label
in each image).
in Algorithm 1 – are useful, when it comes to con-
tinual learning. Figure 2 shows four scenarios, where
this mechanism has proven to be effective. In the first
scenario (Figure 2a), because of the apple, – the im-
age is first classified incorrectly by the root node as
food. This happened with a very small margin be-
tween the probabilities; animal (0.48), artifact (0.03),
food (0.49). At the food level, the image further gets
classified as not here. This happens because a portion
of domestic animal images is contained in the not here
category. It follows that the setback mechanism is ac-
tivated and redirects the sample in the tree to L
1
class
with the next highest probability, i.e., animal, where
the image is finally classified correctly as a dog. The
same happen in Figure 2b, 2c, 2d, where the bird, ve-
hicle and seed firstly got misclassified as Structure,
Structure and Invertebrate respectively, before being
rescued by the setback mechanism.
Another new feature of our method belongs to the
information provided by the algorithm during predic-
tion. A tree-model built according to (Roy et al.,
2020) – here CIFAR 100 was used – has the same
structure as ours except the not here nodes. During
prediction, the sample is rooted from the root node to
a leaf node of the tree. The routing performed is based
on the highest probability of a class. Algorithm 1 in
section 3.2 of (Roy et al., 2020) returns the selected
class. Following this scheme, any information about
the distribution of the probability along the classes is
lost. Theoretically, one can consider a second mode
for the tree, in which all nodes are used for a pre-
diction, and the probability is calculated along the
Towards Robust Continual Learning using an Enhanced Tree-CNN
319

Algorithm 1: Prediction with Setbacks.
1: Input: X image to predict
2: L
0
root trained model
3: {L
1,k
}
K
k=0
level 1 trained tasks
4: {L
2,m
}
M
m=0
level 2 trained tasks
5: Output: P({L
3,n
}
N
n=0
) vector of leaf nodes
class probabilities
6: procedure:
7: predict class k using L
0
(X), save probabilities
and set
˜
k = k
8: setback = False
9: repeat
10: predict class m using L
1,k
(X), save probabili-
ties and set ˜m = m
11: mark L
1,k
as visited
12: while m = not here do
13: mark L
2,m
as visited
14: if all nodes visited in L
1
then
15: set k =
˜
k and m = ˜m
16: break
17: end if
18: set k to the value of the class with the next
highest probability of L
0
(X)
19: recalculate probabilities
20: predict class m using L
1,k
(X) and save prob-
abilities
21: mark L
1,k
as visited
22: end while
23: predict class n using L
2,m
(X) and save proba-
bilities
24: mark L
2,m
as visited
25: while n = not here do
26: set m to the value of the class with the next
highest probability of L
1,k
(X)
27: recalculate probabilities
28: mark L
2,m
as visited
29: if m = not here or all children of L
1,k
were
visited then
30: Set k to the value of the class with the next
highest probability of L
0
(X)
31: setback = True
32: end if
33: predict class n using L
2,m
(X) and save prob-
abilities
34: end while
35: if all of L
2,m
for m = 0,. .., M were visited
then
36: evaluate the tree ignoring all setbacks and
use the highest probabilities ignoring not
here
37: end if
38: until not setback
branches of the tree. Unfortunately, this would come
along with a huge increase of CPU usage during the
prediction. To overcome both limitations (probability
distribution lost and huge CPU usage), we propose a
probability propagation and recalculation mechanism
as described bellow.
Let’s consider predicting a test image X
i
, then
O(N, i) = P({L
3,n
}
N
n=0
) is an output vector contain-
ing the probability of all leaf classes, which is ob-
tained by propagating the probability of each node
in L
1
and L
2
to its corresponding leaf node. Fig-
ures 3 and 4 illustrate this mechanism and show how
O(N, i) is calculated. In Figure 3, the root node clas-
sifies the test sample as belonging to class B with
a probability of 0.6. At node B, the sample is fur-
ther classified as belonging to leaf node B
1
with a
probability of 0.7. The dashed rectangle at the bot-
tom shows the vector O(N,i), containing computed
class probability of each leaf node. While the val-
ues for leaf nodes B
1
and B
2
are obvious, the com-
putation of A
1
and A
2
probabilities demonstrates the
not here propagation. In fact, σ
B
= 0.6 × 0.1 prob-
ability is associated to not here in B. This not here
class in B was trained with images of A
1
,A
2
,C
1
,C
2
nodes. Therefore, we propagate σ
B
– probability of B
not here – to these nodes and compute their final out-
put probabilities as: P(A
1
) = P(A
2
) =
0.3
2
+ σ
B
and
P(C
1
) = P(C
2
) =
0.1
2
+ σ
B
with σ
B
=
0.6×0.1
4
being
the propagated probability of B not here shared by
A
1
,A
2
,C
1
and C
2
.
In the case of Figure 4, there are two runs of the
tree showed in red and blue respectively. During the
first run, the root node classifies the image incorrectly
as belonging to B. Fortunately, the setback mecha-
nism gets activated at B and routes the image back to
the root level. Now we choose to handle this decision
as B is impossible statement. Thus, the probability of
B is zeroed and equally distributed through A and C.
Then the class with the next highest probability (dur-
ing first run) gets selected, which is A. The probability
flowing to A is then computed as the probability of A
at the first run added to the distributed probability of
B (at first run), i.e., P(A) = 0.4 +
0.5
2
. At A, the image
is further classified as belonging to A
1
with a prob-
ability of 0.7. The not here class at A is predicted
with a probability of 0.2, which is then distributed
through A1 and A2. The final probability of A
1
and A
2
is then computed as P(A
1
) =
0.7 +
0.2
2
× 0.65 and
P(A
2
) =
0.1 +
0.2
2
× 0.65 respectively. The prob-
ability P(C
1
) and P(C
2
) are computed via a similar
strategy, which lead the three levels tree from the
example of Figure 4 to the Output vector O(N,i) =
[0.52, 0.13, 0, 0, 0.175, 0.175].
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
320

root
A
A
1
A
2
not
here
B
B
1
B
2
not
here
C
C
1
C
2
not
here
0.3
0.3/2
0.3/2
0.6
0.7
0.2
0.1
0.1/2
0.1/2
0.165 0.165 0.6 × 0.7 0.6 × 0.2 0.065 0.065
Figure 3: Tree demonstrating the computation of leaf node probability vector in one shot.
root
A
A
1
A
2
not
here
B
B
1
B
2
not
here
C
C
1
C
2
not
here
0.4 — 0.4 + 0.5/2 = 0.65
0.7
0.1
0.2
0.5 — 0.0
0.1
0.1
0.8
0.1 — 0.1 + 0.5/2 = 0.35
0.35/2
0.35/2
0.52
0.13 0.0 0.0
0.175 0.175
Figure 4: Tree demonstrating the computation of leaf node probability vector in two runs.
The behavior described above is denoted as recal-
culate probabilities in Algorithm 1. It goes along with
the not here mechanisms, making them powerful tools
for tree-CNNs as will be validated in the experiment
section.
3 ADAPTING A NORM FOR
ROBUST SEMANTIC
PREDICTION
While it can be taken for granted, that through explicit
structural definition and the availability of interim re-
sults, modularization in form of tree-CNNs simpli-
fies interpretability and facilitates error traceability,
the implications of the approach on model robustness
or semantic accuracy necessitate further investigation.
The standard accuracy is quite often misleading in
class sets with a semantic distance. To elaborate this
point, consider e. g. the obstacle detection system of
an autonomous vehicle. In this case, it is of less im-
portance for such a system to be able to accurately tell
apart men and woman than it is to reliably distinguish
between humans and e. g. road signs. We denote this
as predictive conceptual proximity and discuss below,
how to measure it by an appropriate norm.
We first measure the semantic accuracy at each
level by modifying the semantic distance – a metric
– as defined by (Fergus et al., 2010).
S
i, j
=
intersect(path(i), path( j))
max(length(path(i)), length(path( j)))
In the definition taken from (Fergus et al., 2010) the
semantic distance S
i, j
between classes i and j – which
are leaves in the tree – is defined as the number of
nodes shared by their two parent branches, divided by
the length of the longest of the two branches. There-
fore, path(i) is the path from the root node to the i-
th node in a hierarchical label structure given by the
nodes, whereas intersect gives the number of shared
nodes. Thus, we have 0 < S
i, j
≤ 1, with 1 in case of
an identical object and 0 as lower limit for two com-
pletely different objects.
Taking this as an initial concept, we now use
this semantic distance as weight factor for errors per-
formed by a model on a test set D = {(x
i
,y
i
)| i =
1,. .., I} to define the semantic accuracy
p
(sac
p
):
sac
p
=
1
n
n
∑
k=1
S
y
k
,M(x
k
)
− S
min
1 − S
min
p
with S
min
= min
i, j
S
i, j
(1)
If a model is 100% accurate, then the
semantic accuracy
p
(sac
p
) and the common accuracy
are both 1. In any other case the semantic accuracy
p
will provide a more detailed description how robust
the prediction is. In the example shown in Figure
1, S
min
is
1
4
. Thus, the transformation leads again
to the fact that a model, which would always pre-
dict the maximum distance class, will achieve a
semantic accuracy
p
of zero. Like for the common
p-norms, the value of p smooths or sharps the
measurement. With this semantic accuracy
p
we now
have a tool to compare different models regarding
their robustness.
4 EXPERIMENTS AND ANALYSIS
In this section, we demonstrate the benefits of our
method on hierarchical image classification datasets
in a continual learning setup.
Towards Robust Continual Learning using an Enhanced Tree-CNN
321

4.1 Dataset and Baselines
Some problems arise, when a dataset is unbalanced
and comes along with a descent size. Consequently,
many challenges can not be recognized in practice on
datasets like CIFAR100 or MNIST. Hence, we con-
duct experiments on a split of the popular ImageNet,
which is a more challenging and real world related
datasets in comparison to common CL benchmarks
like CIFAR or MNIST. Our split of ImageNet is gen-
erated as shown in Figure 1, representing 152 GB of
images, which leads to a three level hierarchy consist-
ing of twelve tasks presented to the CL models in the
alphabetical order. Each class in level 3 (represented
in red) – except the not here class – contain data of
all its child classes in the ImageNet hierarchy. The
resulting database is therefore unbalanced and con-
tains for example more images regarding animals than
food.
We compare our method against different base-
lines; first of all the elastic weight consolidation
(EWC) (Kirkpatrick et al., 2017), which is a standard
comparative baseline in CL research. The second
baseline we compare with is the original tree-based
incremental learning approach (Roy et al., 2020),
which uses CIFAR as dataset. Beyond this, we pro-
vide an – in a way – upper-bound model, which learns
on all the tasks jointly, that is by accessing training
data at once in a traditional way. We refer to this
model as the monolithic model.
4.2 Model and Training
The starting point for our models are NASNetMo-
bile (Zoph et al., 2018) and NASNetLarge (Zoph
et al., 2018). For both, we start with the weights
trained on the whole ImageNet and adjust them on
our sub-set of ImageNet. The EWC CL model in our
setup is built by applying EWC to the NASNetLarge
architecture with some modifications mentioned later
on. The monolithic model as well is trained using
the NASNetLarge network. For both tree-CNNs each
of the 13 nodes contains a NASNetMobile version,
which is trained for 15 epochs using a batch size of
256.
In summary, there are four big models, two based
on NASNetLarge (EWC and monolithic) and two
based on 13 NASNetMobile (original Tree-CNN and
eTree-CNN). Table 2 indicates, that the full tree with
13 models of the size of NASNetMobile has still
fewer degrees of freedom than the NASNetLarge net-
work, which makes it cheaper to train and memory
efficiently.
One aspect regrading the tree-CNN approaches,
which is worth mentioning, is the fact that in higher
levels the number of training examples shrink. There-
fore, training these nodes relies more on reusing the
weights from the next abstract level and carefully
choosing optimisation parameters like the learning
rate. Otherwise, one may face some kind of overfit-
ting.
4.3 Evaluation
We use two metrics to evaluate continual learning al-
gorithms in hierarchical datasets. The first one is the
all-important average classification accuracy as de-
fined in (Chaudhry et al., 2018). More specifically,
after training on task t the reported accuracy is the av-
erage accuracy obtained from testing on task 1,...,t.
The second metric is the semantic accuracy as defined
in Section 3.
4.4 Results and Analysis
Table 1 reports the accuracy of all four methods in
different flavors. The first and second level accuracy
presents the average classification accuracy – as de-
fined in Section 4.3 – after training on L
1
and L
2
tasks respectively. The accuracy on L
3
outlines a sim-
ilar effect, however, since it is the last level in the
hierarchy, it represents the same value as the overall
model accuracy as such. In papers dealing with Ima-
geNet, this is often denoted as Top-1-Accuracy. The
last row of Table 1 provides results for the semantic
accuracy defined in Section 3. Moreover, the last col-
umn shows results for the monolithic model, which is
trained without the need of CL, therefore accessing all
training data at once. We use this as an upper-bound
reference model and provide percentage values for all
other models compared to this one.
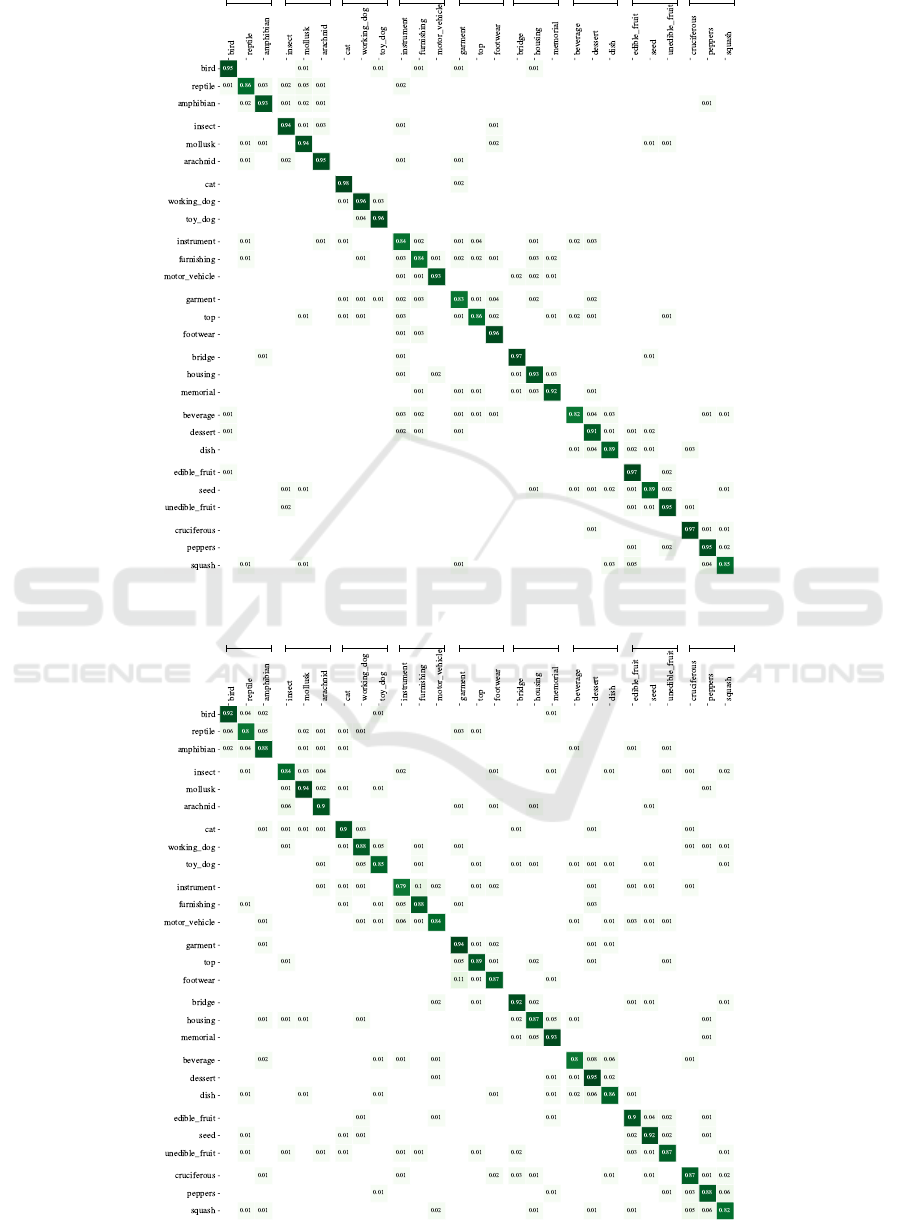
Figures 5 and 6 visualize the confusion matrices
for enhanced Tree-CNN (eTree-CNN) and the EWC
approach after training on all tasks. They provide fur-
ther insides on how the misclassifications are finally
distributed. Overall, the results indicate that all CL
methods were capable to learn the multiple ImageNet
tasks in sequence without forgetting. Consistently,
we see that eTree-CNN is able to perform the results
closest to the upper boundary given by the monolithic
model by maintaining high performance on all pre-
viously learned tasks throughout learning later tasks.
Furthermore, we observed that both tree-CNN ap-
proaches perform well regarding their robustness and
semantic accuracy. In general, for all norms, the set-
back approach has proven to be helpful. Interestingly,
as can be seen in Table 1, sac
2
reflects more or less the
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
322
vertebrate invertebrate
domestic
animal
instru-
mentality covering
structure alimentation fruit
vegetable
Figure 5: Results of eTree-CNN displayed in a confusion matrix with sub-sets of the different abstraction levels.
vertebrate invertebrate
domestic
animal
instru-
mentality covering
structure alimentation fruit
vegetable
Figure 6: Results of EWC displayed in a confusion matrix with sub-sets of the different abstraction levels
Towards Robust Continual Learning using an Enhanced Tree-CNN
323

Table 1: Achieved accuracy for different approaches with continual learning (CL) and a completely trained reference value
(without CL).
Norm EWC Tree-CNN Enhanced Tree-CNN Monolithic
with CL with CL with CL without CL
(Level 3) accuracy 0.869 (90.5%) 0.890 (92.7%) 0.917 (95.4%) 0.960 (100%)
Level 2 accuracy 0.898 (92.3%) 0.927 (95.3%) 0.944 (97.0%) 0.973 (100%)
Level 1 accuracy 0.923 (93.5%) 0.952 (96.5%) 0.976 (98.9%) 0.987 (100%)
semantic accuracy
1
0.637 (79.4%) 0.681 (84.9%) 0.709 (88.4%) 0.802 (100%)
semantic accuracy
2
0.621 (87.5%) 0.653 (92.0%) 0.670 (94.4%) 0.71 (100%)
Table 2: Total degrees of freedom to be trained for different
models.
Methods Model Total DoF
eTree-CNN NASNetMobile ×13 57.2 Mio
Tree-CNN NASNetMobile ×13 57.2 Mio
EWC NASNetLarge ×1 85.4 Mio
Monolithic NASNetLarge ×1 85.4 Mio
same relative behavior as the common accuracy. On
one hand, it turned out, that higher p values are not
more suitable to measure semantic accuracy than the
common accuracy. On the other hand, lower p (here
sac
1
) are sensible to measure these changes. Using
this norm, the differences between Tree-CNN, eTree-
CNN and EWC regarding semantic accuracy are bet-
ter emphasized. Over all of these different norms and
derived metrics, one can see the advantage of the tree-
models compared to EWC. While the difference on
level 1 between the reference model and the eTree-
CNN is about 1%, it is more than 6% for the EWC
and over 3% for Tree-CNN. This is even worse for
sac
1
, which is more sensitive regarding errors per-
formed outside the hierarchy structures. It delivers
about 20%, 15%, 12% difference towards the refer-
ence model and EWC, Tree-CNN and eTree-CNN re-
spectively.
A conclusion that can be taken from Table 1 is
that our eTree-CNN outperforms all baselines signifi-
cantly in terms of average accuracy and semantic dis-
tance, whereas Tree-CNN by (Roy et al., 2020) per-
forms superior to EWC. However, it is worth not-
ing that these superior results for both tree-CNN ap-
proaches come along with a limitation EWC does not
contain. In fact, to use the Tree-CNNs, a dataset ex-
hibiting a hierarchy structure is needed, while EWC
can be applied on any dataset.
Moreover, we can observe in Figure 6 (EWC con-
fusion matrix), that although the errors are mainly
distributed within the level 2 hierarchy, the confu-
sion matrix, however it is less sparse compared to
eTree-CNN shown in Figure 5. This is due to the
fact, that in ImageNet a lot of pictures contain pat-
terns of more than one category, which makes the CL
problem more challenging compared to standard CL
benchmarks like MNIST or CIFAR. Some of such test
samples containing more than one category can be
seen in Figure 2, for example animal and food (2a)
or animal and structure (2b). In such situations, our
setback mechanism as described earlier allows eTree-
CNN to still produce strong results at differentiating
past tasks and current tasks (where structure of past
task might appear).
An empirical conclusion, that can be made out of
this is, that eTree-CNN consistently performs better
than all other methods, partially thanks to the way it
rescues some misclassification occurred mostly due to
duplicate structure in the test sample. The idea of em-
powering the model with a setback mechanism along
its recalculated probability tool seems to be working
well with complex data-sets like ImageNet given di-
rections for forthcoming work, where eTree-CNN can
be extended to other real-world applications of CNNs.
5 CONCLUSION
We proposed eTree-CNN, a new tree-based continual
learning method for overcoming catastrophic forget-
ting. A concept of stepbacks was introduced, which
routes back to previous levels when evaluating the
tree, to correct a possible misclassification. Using a
suggested benchmark based on ImangeNet, the pro-
posed approach provides higher accuracy and robust-
ness compared to other continual learning methods.
Moreover, it is cheaper to train and consumes much
less memory than monolithic approaches.
ACKNOWLEDGEMENTS
This work was funded by the federal state of North
Rhine-Westphalia and the European Regional Devel-
opment Fund FKZ: ERFE-040021.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
324

REFERENCES
Chaudhry, A., Dokania, P. K., Ajanthan, T., and Torr, P. H.
(2018). Riemannian walk for incremental learning:
Understanding forgetting and intransigence. In Pro-
ceedings of the European Conference on Computer
Vision (ECCV), pages 532–547.
Fergus, R., Bernal, H., Weiss, Y., and Torralba, A. (2010).
Semantic label sharing for learning with many cate-
gories. In European Conference on Computer Vision,
pages 762–775. Springer.
Goodfellow, I. J., Mirza, M., Xiao, D., Courville, A., and
Bengio, Y. (2013). An empirical investigation of
catastrophic forgetting in gradient-based neural net-
works. arXiv preprint arXiv:1312.6211.
Jung, S., Ahn, H., Cha, S., and Moon, T. (2020). Con-
tinual learning with node-importance based adap-
tive group sparse regularization. arXiv preprint
arXiv:2003.13726.
Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J.,
Desjardins, G., Rusu, A. A., Milan, K., Quan, J.,
Ramalho, T., Grabska-Barwinska, A., et al. (2017).
Overcoming catastrophic forgetting in neural net-
works. Proceedings of the national academy of sci-
ences, 114(13):3521–3526.
Li, X., Zhou, Y., Wu, T., Socher, R., and Xiong, C. (2019).
Learn to grow: A continual structure learning frame-
work for overcoming catastrophic forgetting. In In-
ternational Conference on Machine Learning, pages
3925–3934. PMLR.
Parisi, G. I., Kemker, R., Part, J. L., Kanan, C., and
Wermter, S. (2019). Continual lifelong learning with
neural networks: A review. Neural Networks, 113:54–
71.
Riemer, M., Klinger, T., Bouneffouf, D., and Franceschini,
M. (2019). Scalable recollections for continual life-
long learning. In Proceedings of the AAAI Conference
on Artificial Intelligence, volume 33, pages 1352–
1359.
Roy, D., Panda, P., and Roy, K. (2020). Tree-CNN: A hi-
erarchical deep convolutional neural network for in-
cremental learning. Neural networks: the official
journal of the International Neural Network Society,
121:148–160.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International journal of com-
puter vision, 115(3):211–252.
Rusu, A. A., Rabinowitz, N. C., Desjardins, G., Soyer,
H., Kirkpatrick, J., Kavukcuoglu, K., Pascanu, R.,
and Hadsell, R. (2016). Progressive neural networks.
arXiv preprint arXiv:1606.04671.
Schwartz, R., Dodge, J., Smith, N. A., and Etzioni, O.
(2020). Green ai. Communications of the ACM,
63(12):54–63.
Shin, H., Lee, J. K., Kim, J., and Kim, J. (2017). Continual
learning with deep generative replay. arXiv preprint
arXiv:1705.08690.
Yoon, J., Yang, E., Lee, J., and Hwang, S. J. (2018). Life-
long learning with dynamically expandable networks.
ICLR.
Zoph, B., Vasudevan, V., Shlens, J., and Le, Q. V. (2018).
Learning transferable architectures for scalable image
recognition. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 8697–
8710.
Towards Robust Continual Learning using an Enhanced Tree-CNN
325
