
Investigation of Capsule Networks Regarding their Potential of
Explainability and Image Rankings
Felizia Quetscher
a
, Christof Kaufmann
b
and J
¨
org Frochte
c
Bochum University of Applied Science, 42579 Heiligenhaus, Germany
Keywords:
Explainability, Capsule Networks, Dynamic Routing, Classification, Image Recognition.
Abstract:
Explainable Artificial Intelligence (AI) is a long-ranged goal, which can be approached from different view-
points. One way is to simplify the complex AI model into an explainable one, another way uses post-
processing to highlight the most important input features for the classification. In this work, we focus on
the explanation of image classification using capsule networks with dynamic routing. We train a capsule net-
work on the EMNIST letter dataset and examine the model regarding its explanatory potential. We show that
the length of the class specific vectors (squash vectors) of the capsule network can be interpreted as predicted
probability and it correlates with the agreement between the decoded image and the original image. We use
the predicted probabilities to rank images within one class. By decoding different squash vectors, we visualize
the interpretation of the image as the corresponding classes. Eventually, we create a set of modified letters
to examine which features contribute to the perception of letters. We conclude that this decoding of squash
vectors provides a quantifiable tool towards explainability in AI applications. The explanations are trustworthy
through the relation between the capsule network’s prediction and the corresponding visualization.
1 INTRODUCTION
Through the rise of machine learning applications
the demand for their explainability is increasing. In
the report Guidelines for Trustworthy AI (Ala-Pietil
¨
a
et al., 2019) the explainability of an AI system is clas-
sified as part of its transparency and it consists of two
elements:
the ability to explain [. . . ] the technical pro-
cesses of an AI system and the related human
decisions
When we use the term explainability, we refer to the
technical part of this definition. This is further speci-
fied as requirement of an AI system to be understood
[. . . ] by human beings (Ala-Pietil
¨
a et al., 2019). We
interpret this definition as the reasons that led to a de-
cision of an AI system.
We focus on the classification task on images.
Currently, the application of convolutional neural net-
works (CNNs) on this task is the state of the art, see
e. g. He et al. (2016) and Zoph et al. (2018). Despite
the ability of CNNs for image recognition, classifica-
a
https://orcid.org/0000-0003-1677-5858
b
https://orcid.org/0000-0002-0191-3341
c
https://orcid.org/0000-0002-5908-5649
tion and segmentation tasks, their decisions are nei-
ther always self”=explanatory for humans nor always
human-understandable at all.
Multiple approaches provide methods that aim to
explain the results and the vision inside CNNs by iso-
lating or highlighting important areas of the input im-
age. This is done either by the creation of approxi-
mated models (Ribeiro et al., 2016, 2018) or by the
additional calculations based on a trained model (Si-
monyan et al., 2014; Selvaraju et al., 2017). However,
there is no approach yet that leads to a general conclu-
sive solution to explain the vision of CNNs.
Because of the difficult comprehensibility of stan-
dard CNNs, we use an extension to CNNs to improve
the explainability of classification tasks. One model
architecture, that seems especially suitable for this
task, is the capsule network (CapsNet) architecture
proposed by Sabour et al. (2017). Their explanatory
potential results from vectors, denoted as capsules,
that potentially store human-understandable features.
In a specific approach called Dynamic Routing the in-
formation transfer between the capsules is amplified
or mitigated. During training, the vectors of the last
capsules are masked and then inserted into a decoder
to restore the perceived features of the input image.
After training, the decoder supports explaining the
Quetscher, F., Kaufmann, C. and Frochte, J.
Investigation of Capsule Networks Regarding their Potential of Explainability and Image Rankings.
DOI: 10.5220/0010821600003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 343-351
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
343

perception of the CapsNet.
Subsequently, we use the term CapsNet for the
model that consists of the capsule network itself and
also the decoder. In Sabour et al. (2017), the CapsNet
is trained on the MNIST dataset (Lecun et al., 1998).
It was shown that by modifying the elements inside
the last capsules, features such as stroke thickness,
width or scale change in the digit of the decoded im-
age. Because these features are comparatively human
understandable we examine the potential of CapsNets
to create explanatory results.
We train a CapsNet model on the EMNIST let-
ters (Cohen et al., 2017) dataset. The focus is set on
the ability of the CapsNet to create explanatory image
rankings. The term image ranking refers to the order
of images based on their predicted class probability.
The higher the position of the image in the ranking,
the more it is associated with the considered class.
Firstly, we show that the vectors produced by the
CapsNet are applicable for the creation of image rank-
ings. Secondly, we create and explain the image rank-
ings. The explanation is performed by the visualiza-
tion of those areas that contributed to the prediction
of the correct class. We extend the explanation by vi-
sualizing those features that contributed to the predic-
tion of other classes. Finally, we explore the specific
characteristics of letters that are displayed in an im-
age.
Overall, the main contributions of our work is the
examination of a CapsNet’s potential and usability to
• create comprehensible image rankings for images
of the same label and
• improve investigation techniques regarding the
explainability.
2 EXPLANATORY APPROACHES
OF CNNS
As mentioned above, there are in fact explanatory ap-
proaches for CNNs. In this chapter, we provide a
brief overview about the properties of three funda-
mental explanatory approaches of CNNs: We cover
the LIME approach (Ribeiro et al., 2016), occlusion
maps (Zeiler and Fergus, 2014), saliency maps (Si-
monyan et al., 2014) and the Grad-CAM algorithm
(Selvaraju et al., 2017).
The LIME (Local Interpretable Model”=Agnostic
Explanations) approach is a general method to ex-
plain single results of an AI model. It is not limited
to any specific model architecture. The core idea of
the LIME approach is the substitution of a multidi-
mensional non”=human”=understandable model with
an easier interpretable but linear model as approxima-
tion. It is extended to non-linear approximations by
anchors (Ribeiro et al., 2018). Both approaches result
in the examination and isolation of those image areas
that highly impact the class probability. However, the
results of both approaches show that the isolated areas
differ from those features that humans would use for
their perception.
Occlusion maps as first proposed in Zeiler and
Fergus (2014) are created by occluding different parts
of the input image and hence this approach is model-
agnostic as well. Rectangles filled with gray or ran-
dom noise are often used as occluder. By shifting it
through the image and recording the predicted class
probability, it can provide insights which parts of the
image are important for a specific class. However, a
drawback is that the size of the occluder can influence
the quality of the map. Also when different objects of
the same or different classes are visible and a softmax
output is used, occluding other objects can decrease
or increase the class probability, respectively, which
might lead to a wrong impression.
The approach to create saliency maps and the
Grad-CAM algorithm are model-specific and directly
applied to an available trained CNN model. Saliency
maps visualize prominent pixels from a specified
layer of a CNN by either using guided backpropaga-
tion (Springenberg et al., 2015) or inserting the output
of a layer into the inverted model structure (Zeiler and
Fergus, 2014). Both methods provide a rough orien-
tation for the important features of a class. However,
due to the evaluation of single outputs, the resulting
features are not related to each other and no explana-
tion for the decision-making of the CNN is included.
The Grad-CAM (Gradient-based Class Activation
Map) algorithm (Selvaraju et al., 2017) computes the
gradient of the last feature maps w. r. t. a specific
class. The mean gradient of a feature map is used
as its weighting, because it describes its importance
for class. The positive values of the weighted av-
erage of the feature maps yields the class activation
map. It highlights areas in the original image that
increased the predicted class probability. Similar as
saliency maps the results of the Grad-CAM algorithm
are reasonable for a rough orientation for the CNN’s
decision. However, they primarily show that CNNs
rely on different features for the classification than hu-
mans.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
344
Primary
Capsule
[28, 28]
Input Image
[20, 20, 256]
Feature Maps 1
[6, 6, 256]
Feature Maps 2
[1152, 8]
Primary Caps
[26, 16]
High-Level Caps
[26]
Class Probs.
Conv. Layer
[256, 9 × 9]
stride: 1
no padding
Conv. Layer
[256, 9 × 9]
stride: 2
no padding
Reshape
dim: 8
Caps Layer
dim: 16
Vector
Length
[26, 16]
Masked Caps
[416]
Flat Array
[512][1024]
[784]
Flat Decoded Image
[28, 28]
Decoded Image
Flatten
Dense
Layer
ReLU
Dense
Layer
ReLU
Dense
Layer
Sigmoid
Reshape
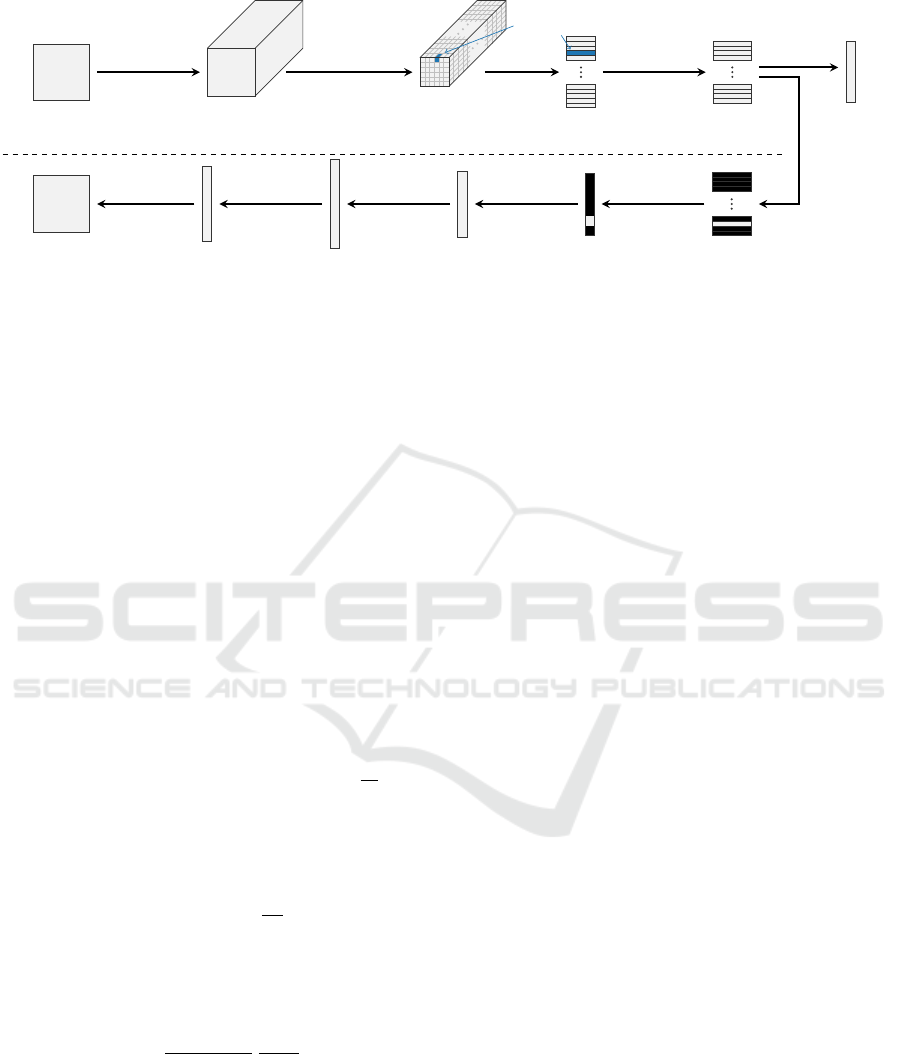
Figure 1: Architecture of a CapsNet with an image input size of 28 × 28 pixels and 26 output classes.
3 ARCHITECTURE OF THE
USED CapsNet
The architecture of our CapsNet is illustrated in Fig-
ure 1. It is based on the architecture proposed by
Sabour et al. (2017). The CapsNet model starts
with two subsequent convolutional layers. We use a
Leaky-ReLU activation function with a leak of a =
0.01 for both convolutional layers. Gagana et al.
(2018) showed that Leaky-ReLU improves the per-
formance compared to plain ReLU. From the output
array of the second convolutional layer (named Fea-
ture Maps 2 in Figure 1) the primary (also: low-level)
capsules are formed by reshaping them. Each primary
capsule consists of a group of n
p
feature maps (here:
n
p
= 8) at a specific location. The number of values
inside a capsule n
p
must be a divisor of the number of
feature maps n
m
(here: n
m
= 256), such that
n
m
n
p
is the
number of primary capsules per location (here: 32).
Together with the dimensions [h
m
, w
m
, n
m
] of the fea-
ture maps (here: [6, 6, 256]) it results in the number
N
p
of primary capsules (here: N
p
= 1152).
N
p
= h
m
· w
m
·
n
m
n
p
(1)
Similar to common neurons, capsules also have an
activation function. As in Sabour et al. (2017), we use
the squashing function
ˆ
g =
||g||
2
2
(1 + ||g||
2
2
)
g
||g||
2
(2)
where g is the vector of a capsule. It squashes the
length of the output vector
ˆ
g of a capsule between 0
and 1. The resulting length depends non-linearly on g.
The squashing function is performed to both primary
and the subsequent high-level capsules.
The values in a capsule can be interpreted as neu-
rons, since each primary capsule i is fully connected
to each high-level capsule j by a weight matrix W
i j
.
However, there is no bias vector. The Dynamic Rout-
ing algorithm (Sabour et al., 2017) is executed be-
tween the primary capsules and the high-level cap-
sules. It adds an additional coupling coefficient c
i j
between each primary capsule i and each high-level
capsule j, which stems from a routing logit b
i j
by ap-
plying a softmax across j. The routing logits b
i j
are
initialized with zeros for each forward pass and up-
dated within the routing iterations. Their values re-
sult from the relevance of the prediction of a primary
capsule i to the prediction of a high-level capsule j,
see Procedure 1 in Sabour et al. (2017). As a result,
the connection between both capsules is amplified or
mitigated.
The number of high-level capsules is equal to the
number of classes. We use the EMNIST letter dataset
(Cohen et al., 2017), which has 26 classes. The num-
ber of values per high-level capsule is arbitrary (here:
16). We refer to the output of a high-level capsule as
high-level squash vector and for the array of all 26
high-level squash vectors as high-level squash array.
On one hand the length of the high-level squash vec-
tors is directly used as predicted class probability. On
the other hand the high-level squash array is passed to
the decoder for the reconstruction of the image.
For the decoder we also use the architecture pro-
posed in Sabour et al. (2017), see the bottom part
of Figure 1. Before the high-level squash array is
inserted into the dense layers of the decoder, it is
masked and flattened. During the training, the mask-
ing is executed for the true class of the input image.
As a result, the values of the high-level squash vec-
tor for the true class stay while the values of all other
high-level squash vectors are set to zero. When we
evaluate the model after training, the masking is done
for one or multiple arbitrary classes, depending on the
purpose of the evaluation.
Investigation of Capsule Networks Regarding their Potential of Explainability and Image Rankings
345

Like in Sabour et al. (2017), we use the margin
loss for the predicted class probabilities L
C
and the
the mean squared error (MSE) loss for the decoder
L
D
. Both loss terms are combined with the weight d:
L
LC
= L
C
+ d · L
D
(3)
This also means, that the decoder is not only respon-
sible to reconstruct the images, rather it provides a
regularization for the CapsNet to learn the class rep-
resentations inside the capsules.
Figure 2: Accuracy and margin loss of the predicted class
probabilities on the test dataset. Solid lines are mean values
and areas are std. dev. of ten runs.
4 TRAINING OF THE CapsNet
The model is trained on the EMNIST letter dataset
(Cohen et al., 2017) that contains 26 classes of hand-
written white letters on a black background. Each
class contains 4800 samples in the training set and
800 in the test set. To train the network we used the
parameters summarized in Table 1.
During the training, the accuracy and the margin
loss L
C
is recorded for each epoch with a test dataset,
see Figure 2. The loss of class probabilities L
C
con-
verges faster than the loss of the decoder L
D
. To avoid
Table 1: Summary of applied parameters to train the Caps-
Net.
Training Parameter Value
Epochs CapsNet (incl. Decoder) 10
Additional Epochs Decoder 20
Batch Size 100
Routing Iterations r 3
High-Level Capsule Dimension 16
Learning Rate 10
−3
Decay Rate per Epoch 0.9
Decoder Loss Weighting d 0.392
overfitting the decoder was trained separately for ad-
ditional 20 epochs by providing the masked squash
arrays as input data.
5 PERFORMING IMAGE
RANKINGS WITH A CapsNet
To provide an impression about the appearance of the
high-level squash array, an example for class A is dis-
played in Figure 3. The rows of the squash array
contain the individual squash vectors for class A to
class Z of the EMNIST letters dataset. The first row
for class A contains the values with the largest devi-
ation from 0 in both positive and negative direction.
The length of this high-level squash vector, calculated
by the euclidean norm, is indeed 0.95. This value is
significantly larger than the lengths of the remaining
high-level squash vectors for the other classes. Con-
sequently, class A is predicted based on this high-level
squash array.
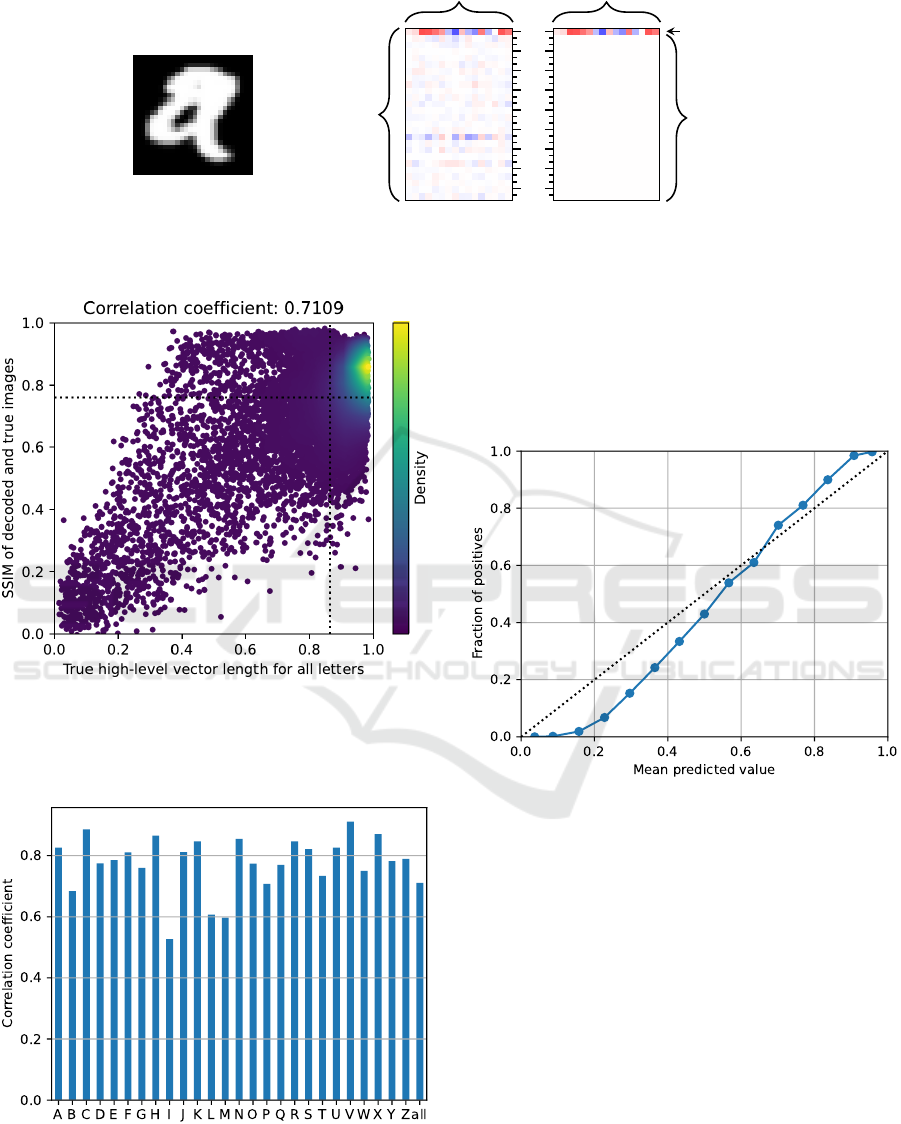
5.1 Validation of the Squash Vector
Length for its Usage in Image
Rankings
Before ranking images by the length of the high-level
squash vector, we confirm that the stored features in a
high-level squash vector are able to represent the im-
age. For that we visualize the stored features by de-
coding the high-level squash array masked for the true
class. Then we measure the quality of the restored
image using the mean structural similarity (SSIM) in-
dex (Wang et al., 2004) between the restored image
and the original image. A scatter plot is created for
all images from the test set relating the SSIM index
with the length of the high-level squash vector for
the true class, see Figure 4. We also compute the
Pearson-Correlation coefficient between the lengths
of the high-level squash vector and the SSIM indices
of the restored images.
A positive correlation coefficient was found for
each class ranging from 0.53 for class I to 0.91 for
class V. The overview of all correlation values is
shown in Figure 5. This relation supports the assump-
tion that a larger high-level squash vector stores more
features which result in a clearer reconstruction of the
letter. It seems reasonable to evaluate the predicted
class probability of an image by the high-level squash
vector length and to use it for the creation of image
rankings within one class.
Figure 6 shows the calibration plot for all pre-
dicted classes. The calibration curve is monotonically
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
346
unmasked
classes
unmasked
class
masked out
classes
high-level squash vector values
A
D
G
J
M
P
T
V
Y
Figure 3: Visualization of a [26 × 16]”=dimensional high-level squash array for the recognition of a sample image of class
A. Left: unmasked squash array, right: squash array masked for class A. A color map from blue to white to red is applied, in
which blue represents negative values, white zero and red positive values.
Figure 4: Correlation of the high-level squash vectors
length for the complete test set with all classes and the cor-
responding mean SSIM index between the original image
and the decoded image from a squash array masked for the
true class. The dotted lines show the mean values.
Figure 5: Correlation coefficients of high-level squash vec-
tor lengths and SSIM indices for each letter and once for all
letters together.
increasing. This strongly supports the application of
the high-level squash vector length for an image rank-
ing, despite that there is a deviation from a perfectly
calibrated curve. Because we do not calibrate the
models, we denote the high-level vector lengths as
predicted probabilities.
Figure 6: Probability calibration plot. The high-level
squash vector length is used as probability. The plot uses
the test dataset and aggregates all classes, where each class
is handled in a one vs. rest manner.
5.2 Creation and Explanation of Image
Rankings
In this section we provide an example for an image
ranking based on high-level squash vectors and their
explanation. In Figure 7 we rank eleven test images of
class B with high-level squash vector lengths between
0.95 and 0.11.
One can observe that a small predicted probability
yields a low intensity in the decoded image. Also, the
letters in these reconstructed images appear smoothed
in comparison to the original images. Irregularities,
such as line breaks and additional serifs are recon-
structed only to a small degree. These missing details
Investigation of Capsule Networks Regarding their Potential of Explainability and Image Rankings
347

indicate that the CapsNet tends to learn a generalized
representation of the class. One reason for that might
lay in the rather large [9 × 9] convolutional filters that
are applied in two convolutional layers.
As discussed in Sabour et al. (2017), when feeding
the decoder with manipulated high-level squash vec-
tors, the characteristics in the decoded image change
in a certain way according to the modified values.
This provides a way to explainability, but a tedious
one, since the features are different for each class and
might be hard to interpret. We use a different way.
By masking the high-level squash array for different
classes, the decoder reconstructs images of the corre-
sponding classes. This allows to view the image inter-
preted as different classes. This is most interesting for
classes with large predicted probabilities to visualize
which part of the image contributed to the prediction.
The third image row in Figure 7 shows the de-
coded images based on the high-level squash vector
masked for the class with the highest predicted prob-
ability, while ignoring the predicted probability for
the true class B. The quality of these reconstructed
letters depends strongly on the level of the predicted
probability. Above a predicted probability of 0.80, the
decoded letter is recognizable in all instances, while
below 0.80 the letter is recognizable in some cases.
By the decoded images for the true class and for
the class with the remaining largest squash vector we
show how the letters are perceived by the CapsNet.
Their areas cannot be transferred directly to the input
image but rather they indicate why a letter was rated
with a high probability. Good examples are the im-
ages in the sixth and ninth columns in Figure 7. These
might be a small b with a missing part in the bottom
or a small h. The highest predicted probability is at
the class H, but the class B also gets a high probabil-
ity. The decoder together with the masking provides
a method to see how the image can be interpreted as
small b or h. This might also work for occluded image
parts. The restoring of the missing characteristics of
a class also supports the hypothesis that the CapsNet
learns generalized shapes of the classes.
When both high-level squash vectors of one image
have a large difference to each other, the recognition
by the CapsNet is clear. However, the smaller the dif-
ference between the lengths of both high-level squash
vectors, the larger is the ambiguity found in the orig-
inal image. This is often the case for the combination
of two high-level squash vector lengths between 0.30
and 0.80.
The last image row in Figure 7 shows the decoded
image based on a high-level squash array masked for
both classes included above. Through those images
the interaction between the high-level squash vectors
is visualized. The closer the lengths of both high-level
squash vectors, the stronger is their mutual impact on
the dual masked image. The impact is especially high
in the range if the difference between both lengths is
small.
As a result, the certainty for recognized features
correlates with the length of the high-level squash
vector. Through this relation a connection between
the predicted class probability and the explanations is
created. Thereby, the explainability results directly
from the predictions of the CapsNet which leads to
trustworthy results.
To examine which letters are frequently addition-
ally detected in specific classes, the number of largest
0.95
H
0.13
0.85
O
0.24
0.75
O
0.15
0.65
D
0.35
0.55
H
0.42
0.46
H
0.59
0.36
O
0.21
0.29
H
0.23
0.21
H
0.81
0.18
Z
0.72
0.11
G
0.74
Original
Masked
Prediction
kv
B
k
Class
−
Masked
Prediction
kv
−
k
Dual Masked
Prediction
Figure 7: Image ranking samples from test dataset for class B based on the high-level squash vector length. The decoded
images, masked for class B, are shown together with the predicted probability of the original sample kv
B
k in the second row.
The third row shows the decoded images, masked for the class with the largest high-level squash vector that is not B. In the
bottom row the decoded images, masked for both classes is shown.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
348

Figure 8: Counts of the highest predicted class probability that is not the true class using the full test dataset.
high-level squash vectors is accumulated for the non-
true class, see Figure 8. We see that the feature of
class L is often found in images of class I (622 times)
and vice versa (599 times). This explains why the
correlation coefficient between the high-level squash
vector length and the SSIM index was low for both
classes. A similar but less distinct phenomenon could
appear at the next high combinations, such as G and Q
(275 and 349 times) as well as U and V (186 and 147
times). The matrix provides an insight to the percep-
tion of the CapsNet because it shows which classes
are found most frequently within other classes.
5.3 Exploration of Perceived Features
To explore the characteristics perceived by the Caps-
Net in more detail we create a set of modified images
that contains the letter pair (R, K) from the test data.
The letter R is gradually transformed to the letter K by
hand, see Figure 9. The images are inserted into the
CapsNet and the resulting high-level squash arrays are
masked for both classes separately. The correspond-
ing decoder outputs and the high-level squash vector
lengths for classes R and K are shown. The lengths
are mostly decreasing for class R while increasing for
class K. As Figure 5 proved, often a larger high-level
squash vector leads to a clearer reconstruction of the
letter. This is confirmed by Figure 9.
The length of the high-level squash vector changes
non-linearly between the samples in Figure 9. There
are one or two images in which the squash vector
length together with the decoded image quality rises
or falls abruptly. According to Figure 6, this behavior
might be a sign for overconfidence. The threshold in
the squash vector length could work as a support to
investigate the features that are crucial for the Caps-
Net to detect a class. Apparently in this specific case,
the top line of the original letter is a decisive factor of
the CapsNet for or against class K. Equally, the con-
nection of the loop for the letter R must have a certain
intensity for the CapsNet to find the class R. Several
of the missing features are interpolated, we suspect,
towards generalized letters which maximizes activa-
tion. This assumption is supported by the rise of the
squash vector length from the fifth to the sixth im-
age. We assume, this occurs because the sixth image
resembles one of the generalized letters for class R
more than the fifth image.
Investigation of Capsule Networks Regarding their Potential of Explainability and Image Rankings
349

0.96
0.12
0.94
0.09
0.94
0.07
0.92
0.07
0.71
0.23
0.91
0.48
0.32
0.91
0.14
0.93
0.04
0.95
0.03
0.96
0.05
0.98
Handwritten
Input
High-Level
Squash
Array
R-Masked
Prediction
kv
R
k
K -Masked
Prediction
kv
K
k
KR-Masked
Prediction
Figure 9: Predictions of the decoder for the image set containing morphed images between the classes K and R.
The explored threshold contributes to the explana-
tory approach with the CapsNet. On this basis, the
characteristics that are important to the recognition
of a class can be extracted. The threshold of two
classes is not necessarily on the same point. This re-
sults in the capability to recognize ambiguous images.
Through the decoding of the squash array masked for
one class it is explainable which characteristics of the
input image were perceived by the CapsNet. Further-
more, the ambiguous letters are also letters that are
ambiguous for the human perception.
6 CONCLUSION AND FUTURE
PROSPECTS
In the introduction we referred to the term explain-
ability as an AI system that is understood [. . . ] by hu-
man beings (Ala-Pietil
¨
a et al., 2019). With the high-
level squash array of the CapsNet together with the
decoder we examined a strong explanatory tool. We
showed that the length of the high-level squash vector
is applicable as predicted class probability and that a
ranking based on its length is reasonable.
The image rankings were explained by decoding
specific high-level squash vectors. The resulting char-
acteristics showed how the images can be interpreted
as the true class and as another class. Thereby, we
could explain which areas were misrecognized by
the CapsNet. Based on the high-level squash vector
length we could explain the degree of the misinter-
pretation. Finally we showed, based on the transfor-
mation of specific images that the features used by the
CapsNet are comparable to the human recognition.
In conclusion, the length of squash vector pro-
vides an explainable and quantifiable tool for image
classification. Its advantage above post-hoc explana-
tory approaches is the connection of the class proba-
bility and the explanation by visualizing the features
of the high-level squash array. Both outputs rely on
the values stored in the high-level squash array result-
ing in a high trustworthiness of the explanations.
ACKNOWLEDGEMENTS
The authors of this work were funded by SUMA e. V.
as well as the federal state of North Rhine-Westphalia
and the European Regional Development Fund FKZ:
ERFE-040021.
REFERENCES
Ala-Pietil
¨
a, P., Bauer, W., Bergmann, U., and Bietlikov
´
a,
M. (2019). Ethics guidelines for trustworthy AI. EU
Publications.
Cohen, G., Afshar, S., Tapson, J., and van Schaik, A.
(2017). EMNIST: Extending MNIST to handwrit-
ten letters. In 2017 International Joint Conference on
Neural Networks (IJCNN), pages 2921–2926.
Gagana, B., Athri, H. U., and Natarajan, S. (2018). Activa-
tion function optimizations for capsule networks. In
2018 International Conference on Advances in Com-
puting, Communications and Informatics (ICACCI),
pages 1172–1178. IEEE.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
350

He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). “Why
should I trust you?” Explaining the predictions of any
classifier. In Proceedings of the 22nd ACM SIGKDD
international conference on knowledge discovery and
data mining, pages 1135–1144.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2018). An-
chors: High-Precision Model-Agnostic Explanations.
Proceedings of the AAAI Conference on Artificial In-
telligence, 32(1).
Sabour, S., Frosst, N., and Hinton, G. E. (2017). Dy-
namic routing between capsules. In Proceedings of
the 31st International Conference on Neural Informa-
tion Processing Systems, NIPS’17, page 3859–3869,
Red Hook, NY, USA. Curran Associates Inc.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2017). Grad-CAM: Vi-
sual Explanations from Deep Networks via Gradient-
Based Localization. In 2017 IEEE International Con-
ference on Computer Vision (ICCV), pages 618–626.
Simonyan, K., Vedaldi, A., and Zisserman, A. (2014). Deep
Inside Convolutional Networks: Visualising Image
Classification Models and Saliency Maps. In Bengio,
Y. and LeCun, Y., editors, 2nd International Confer-
ence on Learning Representations, ICLR 2014, Banff,
AB, Canada, April 14-16, 2014, Workshop Track Pro-
ceedings.
Springenberg, J., Dosovitskiy, A., Brox, T., and Riedmiller,
M. (2015). Striving for simplicity: The all convolu-
tional net. In ICLR (workshop track).
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE transactions on
image processing, 13(4):600–612.
Zeiler, M. D. and Fergus, R. (2014). Visualizing and Under-
standing Convolutional Networks. In Fleet, D., Pajdla,
T., Schiele, B., and Tuytelaars, T., editors, Computer
Vision – ECCV 2014, pages 818–833, Cham. Springer
International Publishing.
Zoph, B., Vasudevan, V., Shlens, J., and Le, Q. V. (2018).
Learning transferable architectures for scalable image
recognition. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 8697–
8710.
Investigation of Capsule Networks Regarding their Potential of Explainability and Image Rankings
351
