
Subfield-based Parallel Kernel-thinning Algorithms on the BCC Grid
G
´
abor Karai
a
, P
´
eter Kardos
b
and K
´
alm
´
an Pal
´
agyi
c
Department of Image Processing and Computer Graphics, University of Szeged, Szeged, Hungary
Keywords:
Shape Representation, Kernel-thinning, BCC Grid, Topology-preservation.
Abstract:
Kernel-thinning is a widely used technique for extracting the topological kernel from a digital object (i.e.,
producing a minimal structure that is topologically equivalent to the original elongated object). In this paper,
two subfield-based parallel kernel-thinning algorithms acting on the non-standard body centered cubic (BCC)
grid are presented. Our algorithms combine a sufficient condition for topology preservation with two types of
partitionings of the BCC grid, thus both algorithms are topology-preserving. According to our best knowledge,
the reported algorithms are the very first parallel thinning algorithms on the BCC grid.
1 INTRODUCTION
A binary digital picture (picture in short) on a discrete
space is composed of black or white points (Kong
and Rosenfeld, 1989). Skeletonization provides fre-
quently applied region-based shape descriptors which
represent the general shape of binary objects that are
present in images (Saha et al., 2016; Saha et al., 2017;
Siddiqi and Pizer, 2008). In 3D, there are three types
of skeleton-like features: the centerline, the medial
surface, and the topological kernel. The centerline
is a line-like 1D representation of objects that cap-
tures the part-whole structure of the object to be de-
scribed (Cornea et al., 2007; Sobiecki et al., 2014).
In many applications (Saha et al., 2016), it is a con-
cise representation of tubular and tree-like 3D objects.
The medial surface provides an approximation to the
continuous 3D skeleton, since it can contain 2D sur-
face patches. A topological kernel of a 3D object is a
minimal set of points that is topologically equivalent
(Kong and Rosenfeld, 1989) to the original object. It
is fairly useful in representing or checking the topo-
logical structure of the object to be processed. Note
that a topological kernel of a 3D object is an isolated
point if and only if it does not contain any holes (that
donuts have) nor cavities (i.e., bubbles). Otherwise,
topological kernels are formed by 1-point thick closed
curves and/or 1-point thick closed surfaces.
Several approaches have been proposed for pro-
ducing skeleton-like features from (segmented) bi-
a
https://orcid.org/0000-0001-9609-8628
b
https://orcid.org/0000-0001-8857-4102
c
https://orcid.org/0000-0002-3274-7315
nary objects. Some authors presented comprehen-
sive and concise surveys (Saha et al., 2016; Saha
et al., 2017; Siddiqi and Pizer, 2008; Sobiecki et al.,
2014; Tagliasacchi et al., 2016). Thinning is one of
the major skeletonization techniques (Hall, 1996). It
is an iterative object-reduction process for producing
skeleton-like features in a topology-preserving way:
the outmost layer of an object is deleted, and the
entire process is repeated until stability is reached.
The topology-oriented thinning pays less attention
to the metric properties of the object to be repre-
sented, since the invariance under arbitrary rotation
angles or scaling factors is not fulfilled. In spite of
these drawbacks, our attention has been focused on
thinning, since thinning is the fastest skeletonization
method, it can be implemented easily, it can pro-
duce all types of skeleton-like features, the topology-
preservation can be guaranteed, and thinning provides
practically exquisite descriptors for a number of ap-
plications. There are three kinds of 3D thinning al-
gorithms according to the three types of skeleton-like
shape features: curve-thinning algorithms are used to
extract centerlines, surface-thinning algorithms pro-
duce medial surfaces, while kernel-thinning or reduc-
tive shrinking ones are capable of extracting topolog-
ical kernels (Hall et al., 1996).
A parallel reduction transforms a picture only by
changing some set of black points to white ones si-
multaneously, which is referred to as deletion (Hall,
1996). Parallel thinning algorithms are composed of
parallel reductions, and they fall into three major cat-
egories: fully parallel, subiteration-based (or direc-
tional), and subfield-based (Hall, 1996). Fully par-
288
Karai, G., Kardos, P. and Palágyi, K.
Subfield-based Parallel Kernel-thinning Algorithms on the BCC Grid.
DOI: 10.5220/0010831000003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 288-295
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

allel algorithms apply the same parallel reduction in
each thinning phase; in subiteration-based algorithms
a cycle of a small set of parallel reductions are as-
signed to the selected kinds of deletion directions, and
only border points of a certain kind can be deleted at
a subiteration; subfield-based algorithms partition the
given digital space into k ≥ 2 subsets which are al-
ternatively activated, and only some points in the ac-
tive subfield can be deleted simultaneously. Similarly
to the directional approach, an iteration step of a k-
subfield algorithm is composed of k subcycles (i.e.,
parallel reductions).
Existing 3D thinning algorithms act on the con-
ventional 3D cubic grid, in which each point is associ-
ated with an element of Z
3
(i.e., a point in the 3D Eu-
clidean space with integer coordinates), and its voxel-
representation contains unit cubes. According to our
best knowledge, no one proposed kernel-thinning on
the body-centered cubic (BCC) grid. The voxel-
representations associated with this non-standard grid
contain truncated octahedra. The importance of the
BCC grid shows an upward tendency due to its advan-
tages of geometric and topologic properties (
ˇ
Comi
´
c
and Nagy, 2016; Cs
´
ebfalvi, 2013; Matej and Lewitt,
1995; Strand, 2004; Strand and Nagy, 2008; Theussl
et al., 2001).
In this paper, the very first topology-preserving
parallel kernel-thinning algorithms acting on the BCC
grid are presented. Both of the proposed algorithms
fall into the category of subfield-based.
The rest of this paper is organized as follows: Sec-
tion 2 gives an outline of the key concepts of digital
topology and the relevant results are described. Then
in Section 3, two novel kernel-thinning algorithms are
proposed. In Section 4 results on some test images
produced by our algorithms are given. Finally, we
round off this paper with some concluding remarks.
2 BASIC NOTIONS AND RESULTS
Next, we define the key concepts of digital topology
as reviewed in (Kong and Rosenfeld, 1989).
A (14, 14) picture on the BCC grid is a quadruple
(B, 14, 14, B), where an element of B is assigned to
each point; B ⊆ B denotes the set of black points; each
point in B \B is said to be a white point; The same ad-
jacency relation called 14-neighborhood is assigned
to the sets of black and white points. Let N
14
(p) de-
note the set of points that are 14-adjacent to p, see
Fig. 1.
Since the studied adjacency relation is symmetric,
its reflexive-transitive closure forms an equivalence
relation, and the generated equivalence classes of a
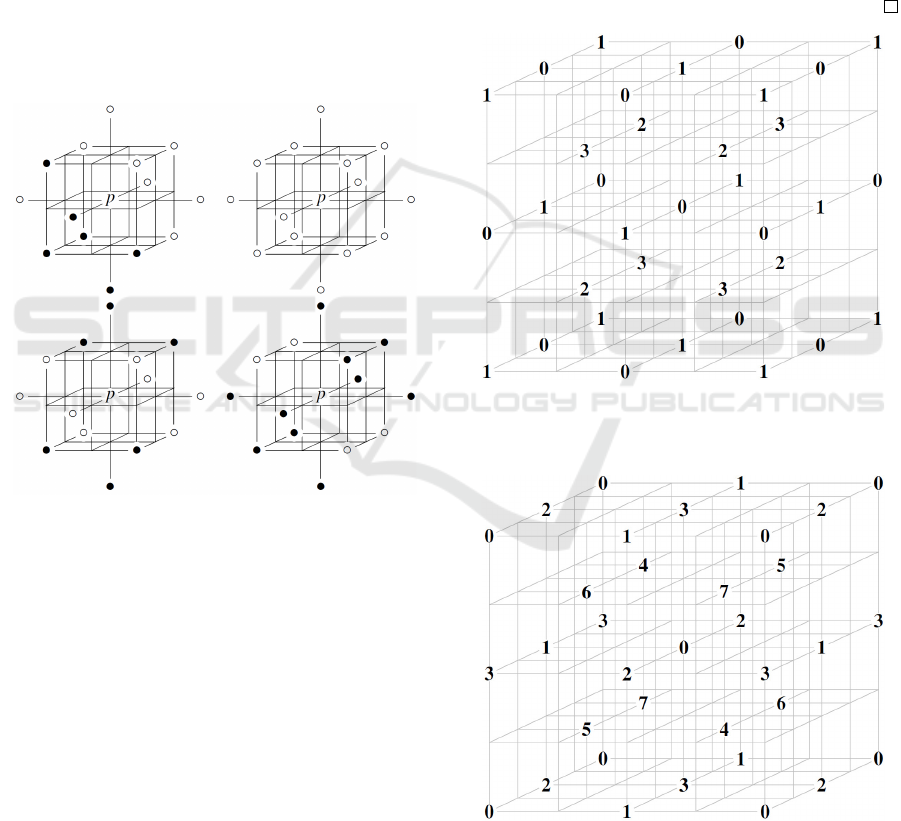
Figure 1: The studied adjacency relation on B (left). The
14 points marked ‘•’ form the set N
14
(p). (Note that un-
marked elements in Z
3
are not points in B.) The voxel-
representation of N
14
(p), where each voxel is a truncated
octahedron (right).
set of points are called components. A black com-
ponent or an object is a 14-component of B, while a
white component is a 14-component of B \ B.
A point p ∈ B is an interior point for B, if all points
being 14-adjacent to p are in B (i.e., N
14
(p) ⊂ B), p is
called a border point if it is not an interior point, and
p is said to be an isolated point if it forms a singleton
object (i.e., N
14
(p) ∩ B =
/
0).
Thinning algorithms, composed of reductions, are
required to preserve topology (Kong, 1995). A reduc-
tion in 2D does not preserve topology if any object
in the input picture is split (into several objects) or is
completely deleted, any white component in the input
picture is merged with another white component, or
a white component is created where there was none
in the input picture. There is an additional concept
called hole in 3D pictures. Holes (which donuts have)
are formed from white points, but they are not white
components (Kong and Rosenfeld, 1989). Topology
preservation in 3D implies that eliminating or creating
any hole is not allowed.
A black point is said to be simple if its deletion is
a topology-preserving reduction. Now we will make
use of the following characterization of simple points:
Theorem 1. (Strand and Brunner, 2006) A point p ∈
B in picture (B, 14, 14, B) is simple if and only if the
following conditions hold:
1. N
14
(p) ∩ B contains exactly one component.
2. N
14
(p) \ B contains exactly one component.
It is an easy consequence of Theorem 1 that only non-
isolated border points may be simple, and the simple-
ness is a local property (i.e., it can be decided by ex-
amining the points that are 14-adjacent to the given
black point). Figure 2 gives four illustrative examples
of simple and non-simple points.
Parallel reductions delete a set of points and not
just a single black point. Thus we need to consider
what is meant by topology preservation when a num-
Subfield-based Parallel Kernel-thinning Algorithms on the BCC Grid
289
ber of points are deleted at a time. One of the au-
thors established the following sufficient conditions
for topology-preserving reductions:
Theorem 2. (Kardos, 2021) A reduction is topology-
preserving in picture (B, 14, 14, B) if the following
conditions hold:
1. Only simple points are deleted.
2. If two 14-adjacent points p and q are deleted, q is
simple in picture (B, 14, 14, B \ {p}).
3. If three mutually 14-adjacent points are deleted,
they can be arranged in a sequence hp, q, ri such
that p is simple in picture (B, 14, 14, B), q is sim-
ple in picture (B, 14, 14, B \ {p}), and r is simple
in picture (B, 14, 14, B \ {p, q}).
4. No object formed by four mutually 14-adjacent
black points is deleted completely.
Figure 2: Examples of simple and non-simple points. The
positions marked ‘•’ and ‘◦’ represent black and white
points, respectively. Black point p is simple only in the top
left configuration. In the top right example, p is an isolated
black point, thus Condition 2 of Theorem 1 is not hold. In
the bottom left configuration, we can find two components
in N
14
(p) ∩ B, hence Condition 1 of Theorem 1 is violated.
The bottom right configuration depicts a case where there
exist two 14-components in N
14
(p)\ B, thus Condition 2 of
Theorem 1 does not hold.
In Section 3, two subfield-based parallel kernel-
thinning algorithms are reported. We propose the par-
titions of B into four and eight subfields as shown in
Fig. 3 and Fig. 4, respectively.
Let us state now an important property of these
partitionings:
Proposition 1. If p ∈ S
k
(i) (k = 4, 8; i = 0, 1, . . . , k −
1) and q ∈ N
14
(p), q 6∈ S
k
(i).
It is obvious by careful examination of Fig. 3 and
Fig. 4.
By Proposition 1, Theorem 2 can by simplified for
reductions of subfield-based thinning algorithms:
Theorem 3. A reduction that deletes a subset of
S
k
(i) ∩ B (k = 4, 8; i = 0, 1, . . . , k − 1) from picture
(B, 14, 14, B) is topology-preserving if only simple
points are deleted.
Proof. It is obvious that Condition 1 of Theorem 2 is
satisfied.
With the help of Proposition 1, it can be readily
seen that there is no mutually 14-adjacent pair (triplet
and quadruple) of points in the same subfield accord-
ing to the proposed partitionings. Thus the last three
conditions of Theorem 2 are irrelevant here.
Figure 3: Partition of B into four subfields. All points
marked ‘i’ are in subfield S
4
(i) (i = 0, 1, 2, 3). (Note that
unmarked elements in Z
3
are not points in B).
Figure 4: Partition of B into eight subfields. All points
marked ‘i’ are in subfield S
8
(i) (i = 0, 1, . . . , 7). (Note that
unmarked elements in Z
3
are not points in B).
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
290

3 NEW SUBFIELD-BASED
PARALLEL THINNING
ALGORITHMS
In this section, two parallel algorithms are reported:
• SF-4-TK: 4-subfield kernel-thinning algorithm,
• SF-8-TK: 8-subfield kernel-thinning algorithm.
Algorithm 1 gives the two kernel-thinning algorithms.
Algorithm 1: Algorithm SF-k-TK (k = 4, 8).
Input: picture (B, 14, 14, X)
Output: picture (B, 14, 14, Y )
// initialize resulted black points
Y ← X
repeat
// initialize deleted points
D ←
/
0
// k subiterations
for i ← 0 to k − 1 do
// collect deletable points
D(i) ← { p | p ∈ S
k
(i) ∩Y and simple }
// parallel deletion
Y ← Y \ D(i)
// collect deleted points
D ← D ∪ D(i)
until D =
/
0
In Algorithm 1 the kernel of the repeat cycle cor-
responds to one iteration step that comprises k (k =
4, 8) subiterations (i.e., parallel reductions) in which
the k subfields (see Fig. 3 and Fig. 4) are alternatively
activated. The thinning process is terminated if no
points are deleted within an iteration step (i.e., D =
/
0).
Note that a general and computationally efficient
implementation scheme for parallel thinning algo-
rithms was proposed in (Pal
´
agyi, 2008). This scheme
takes advantage of the fact that all thinning algorithms
may delete only border points. Thus we do not have
to examine the deletability of interior points, and the
repeated scans of the entire array (that stores the ac-
tual picture) can be avoided by using a linked list that
stores the set of border points to be evaluated for pos-
sible deletion in the actual thinning phase.
Notice that only simple points can be deleted in
each subiteration of all the proposed subfield-based
parallel thinning algorithms (see Algorithm 1). Thus
we can state the following:
Theorem 4. Algorithms SF-4-TK and SF-8-TK are
both topology-preserving.
Proof. By Theorem 3, it is obvious that each subit-
eration (i.e., parallel reduction) of our algorithms is
topology-preserving.
Since the proposed subfield-based parallel kernel-
thinning algorithms are composed of topology-
preserving reductions, the entire algorithms are
topology-preserving.
We remark that in our kernel-thinning algorithms
(see Algorithm 1) we do not need to use any geomet-
ric constraint.
Note that we follow a safe technique for design-
ing topology-preserving parallel thinning algorithms:
some sufficient conditions for topology-preserving re-
ductions are combined with parallel thinning strate-
gies and geometric constraints (Pal
´
agyi et al., 2012).
Lastly, since the output of Algorithm 1 does not
contain any simple point, the presented algorithms are
indeed kernel-thinning ones:
Proposition 2. Algorithms SF-4-TK and SF-8-TK
extract the topological kernel of the input object.
4 RESULTS
The proposed two algorithms were tested on objects
of different shapes. We present ten illustrative exam-
ples below (see Figs. 5-14). The numbers in parenthe-
ses under the original images are the counts of object
points. The pairs of numbers in parentheses under
the produced topological kernels indicate the counts
of object points and the numbers of the required iter-
ations, respectively. Notice that the algorithms trans-
form the synthetic object with no hole in Fig. 5 to
a single voxel, while the topological kernels of ho-
ley objects in Figs. 6-14 are one-voxel thin connected
closed curve segments. Notice that in Fig. 14, our al-
gorithms produced exactly the same skeleton-like fea-
tures, and even the sufficient number of iterations are
equal.
Our implementations were run on a usual desk-
top (HP ProDesk 400 G4; 3.20 GHz Intel Core i5-
6500; Windows 10 x64) and written in C++. The
std::chrono library was used for runtime measure-
ment. Table 1 contains the computation times of our
algorithms for each object shown in Figs. 5-14. Note
that reading the input image and writing the output
image were not considered here. We can observe that
the computational cost does not depend on the num-
ber of subfields, due to the fact that any border point
belongs to exactly one subfield. Thus, any of those
points is examined exactly once in each iteration.
Since the authors do not know any existing algo-
rithm acting on the BCC grid for producing topolog-
ical kernels, we can not compare the results of SF-4-
TK and SF-8-TK with competing methods. Note that
topological kernels could be produced by sequential
Subfield-based Parallel Kernel-thinning Algorithms on the BCC Grid
291
deletion of simple points and by various skeletoniza-
tion approaches, but these strategies are out of scope
of this work.
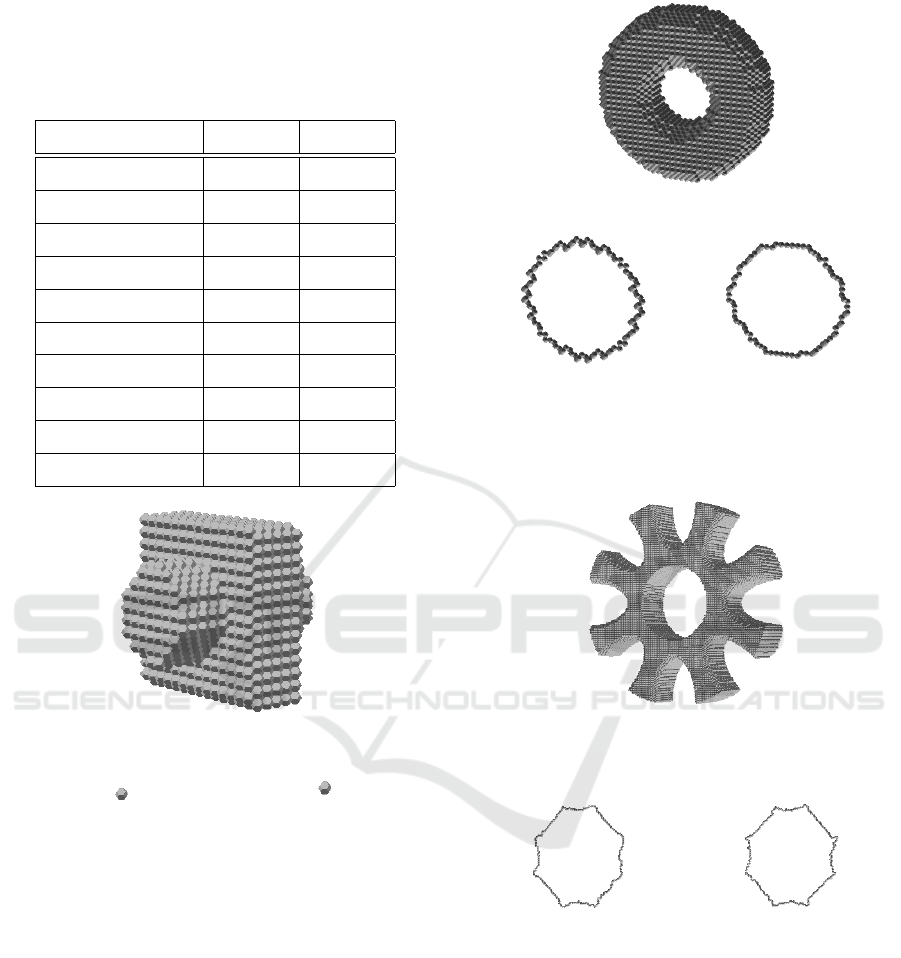
Table 1: Computation times (in millisec.) of Algorithm 1.
Test object SF-4-TK SF-8-TK
Syntetic object 0.993 0.992
Torus 1.994 1.995
Gear 36.869 36.889
Hand 31.947 32.897
Letter A 9.942 9.954
‘Fertility’ 29.908 29.920
Helicopter 38.890 38.895
Cube with 1 hole 37.866 37.890
Cube with 2 holes 33.914 33.909
Cube with 3 holes 31.891 31.902
(2 806)
(1, 8) (1, 10)
Figure 5: A 32 × 32 × 32 image of a synthetic object
(top) and its topological kernels produced by algorithms
SF-4-TK (bottom left) and SF-8-TK (bottom right).
(10 028)
(112, 7) (84, 8)
Figure 6: A 64 × 64 × 19 image of a synthetic object
(top) and its topological kernels produced by algorithms
SF-4-TK (bottom left) and SF-8-TK (bottom right).
(149 142)
(218, 25) (234, 27)
Figure 7: A 45 × 191 × 191 image of a gear (top) and
its topological kernels produced by algorithms SF-4-TK
(bottom left) and SF-8-TK (bottom right).
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
292
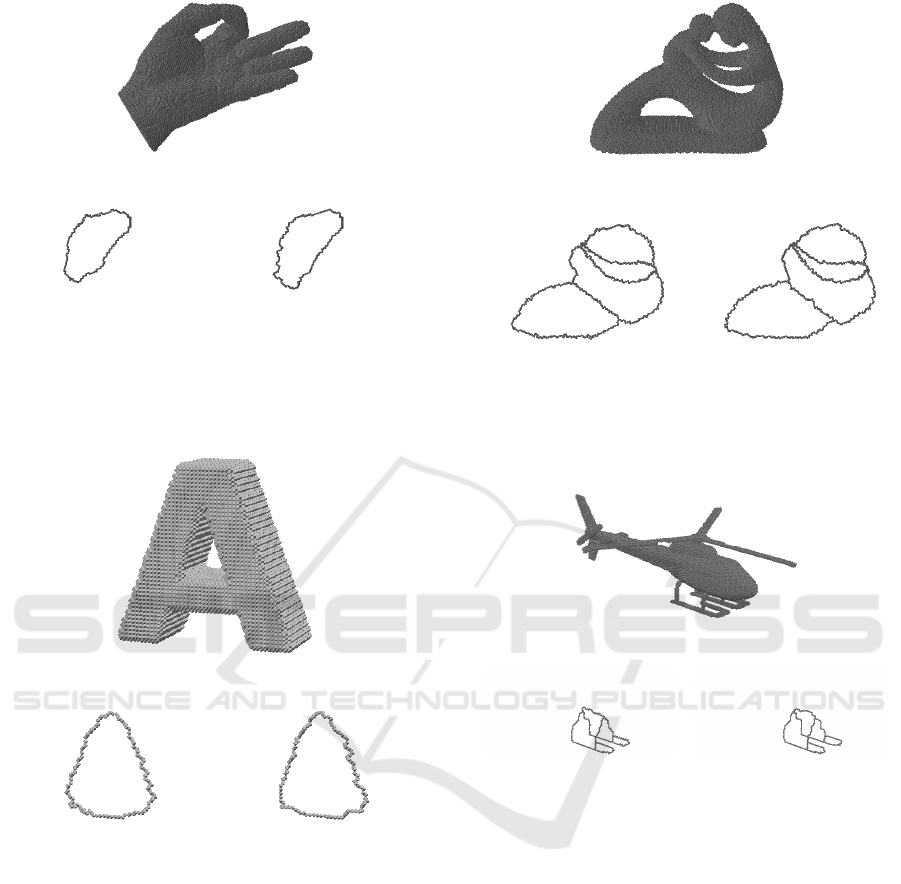
(113 751)
(151, 51) (165, 43)
Figure 8: A 191 × 96 × 114 image of a hand (top) and
its topological kernels produced by algorithms SF-4-TK
(bottom left) and SF-8-TK (bottom right).
(41 964)
(109, 17) (109, 20)
Figure 9: A 100 × 100 × 40 image of a letter (top) and
its topological kernels produced by algorithms SF-4-TK
(bottom left) and SF-8-TK (bottom right).
(100 188)
(471, 18) (459, 17)
Figure 10: A 138 × 70 × 189 image of ‘fertility’ (top) and
its topological kernels produced by algorithms SF-4-TK
(bottom left) and SF-8-TK (bottom right).
(68 432)
(304, 85) (272, 72)
Figure 11: A 381 × 103 × 255 image of a helicopter
(top) and its topological kernels produced by algorithms
SF-4-TK (bottom left) and SF-8-TK (bottom right).
Subfield-based Parallel Kernel-thinning Algorithms on the BCC Grid
293
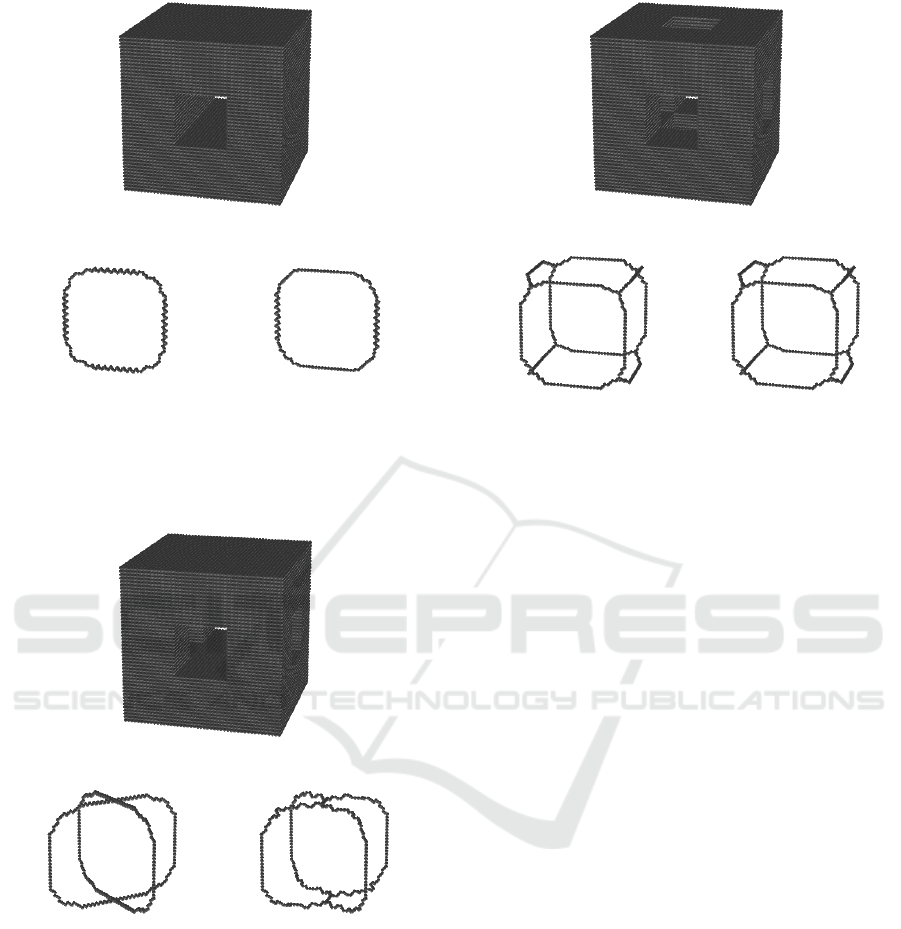
(178 808)
(184, 20) (156, 21)
Figure 12: A 93 × 93 × 93 image of a holey cube
(top) and its topological kernels produced by algorithms
SF-4-TK (bottom left) and SF-8-TK (bottom right).
(163 928)
(330, 17) (320, 18)
Figure 13: A 93× 93 × 93 image of a holey cube with more
holes (top) and its topological kernels produced by algo-
rithms SF-4-TK (bottom left) and SF-8-TK (bottom right).
(149 048)
(368, 11) (368, 11)
Figure 14: A 93 × 93 × 93 image of a cube with even more
holes (top) and its topological kernels produced by algo-
rithms SF-4-TK (bottom left) and SF-8-TK (bottom right).
5 CONCLUSIONS
In this paper, the very first 3D kernel-thinning algo-
rithms on the BCC grid are proposed. These par-
allel algorithms fall into the subfield-based category,
and they can produce topological kernels. The topo-
logical correctness of our algorithm is guaranteed by
the safe designing technique: a sufficient condition
for topology-preserving reductions is combined with
a parallel thinning strategy.
In a future work, we plan to construct new sym-
metric and asymmetric point-based sufficient condi-
tions for topology preservation. Combining these
conditions with all types of parallel thinning methods
and various geometric constraints yields a variety of
parallel 3D curve-, surface-, and kernel-thinning al-
gorithms acting on the BCC grid.
REFERENCES
ˇ
Comi
´
c, L. and Nagy, B. (2016). A combinatorial coordinate
system for the body-centered cubic grid. Graphical
Models, 87:11–22.
Cornea, N., Silver, D., and Min, P. (2007). Curve-skeleton
properties, applications, and algorithms. IEEE Trans-
actions on Visualization and Computer Graphics,
13:530–548.
Cs
´
ebfalvi, B. (2013). Cosine-weighted b-spline interpola-
tion: A fast and high-quality reconstruction scheme
for the body-centered cubic lattice. IEEE Transactions
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
294

on Visualization and Computer Graphics, 19:1455–
1466.
Hall, R. W. (1996). Parallel connectivity-preserving thin-
ning algorithms. In Kong, T. Y. and Rosenfeld, A.,
editors, Topological algorithms for digital image pro-
cessing, pages 145–179. Elsevier Science.
Hall, R. W., Kong, T. Y., and Rosenfeld, A. (1996). Shrink-
ing binary images. In Kong, T. Y. and Rosenfeld, A.,
editors, Topological algorithms for digital image pro-
cessing, pages 31–98. Elsevier Science.
Kardos, P. (2021). Topology preservation on the bcc grid.
Journal of Combinatorial Optimization.
Kong, T. Y. (1995). On topology preservation in 2-d and 3-d
thinning. International Journal of Pattern Recognition
and Artificial Intelligence, 9:813–844.
Kong, T. Y. and Rosenfeld, A. (1989). Digital topology:
Introduction and survey. Computer Vision, Graphics,
and Image Processing, 48:357–393.
Matej, S. and Lewitt, R. M. (1995). Efficient 3d grids
for image reconstruction using spherically-symmetric
volume elements. IEEE Transactions on Nuclear Sci-
ence, 42:1361–1370.
Pal
´
agyi, K. (2008). A 3d fully parallel surface-thinning
algorithm. Theoretical Computer Science, 406:119–
135.
Pal
´
agyi, K., N
´
emeth, G., and Kardos, P. (2012). Topol-
ogy preserving parallel 3d thinning algorithms. In
Brimkov, V. E. and Barneva, R. P., editors, Digital Ge-
ometry Algorithms. Theoretical Foundations and Ap-
plications to Computational Imaging, pages 165–188.
Springer.
Saha, P. K., Borgefors, G., and Sanniti di Baja, G. (2016).
A survey on skeletonization algorithms and their ap-
plications. Pattern Recognition Letters, 76:3–12.
Saha, P. K., Borgefors, G., and Sanniti di Baja, G., editors
(2017). Skeletonization: Theory, methods and appli-
cations. Academic Press.
Siddiqi, K. and Pizer, S., editors (2008). Medial Represen-
tations – Mathematics, Algorithms and Applications,
Computational Imaging and Vision, vol. 37. Springer,
New York.
Sobiecki, A., Jalba, A., and Telea, A. (2014). Comparison
of curve and surface skeletonization methods for voxel
shapes. Pattern Recognition Letters, 47:147–156.
Strand, R. (2004). Surface skeletons in grids with non-cubic
voxels. In Proc. of the 17th International Conference
on Pattern Recognition, ICPR 2004, pages 548–551.
Cambridge.
Strand, R. and Brunner, D. (2006). Simple points on the
body-centered cubic grid. Technical Report 42, Cen-
tre for Image Analysis, Uppsala University, Uppsala,
Sweden.
Strand, R. and Nagy, B. (2008). Weighted neighbour-
hood sequences in non-standard three-dimensional
grids - metricity and algorithms. In Proc. of the 14th
IAPR International Conference on Discrete Geometry
for Computer Imagery, DGCI 2008, pages 201–212.
Springer, LNCS, vol 4992.
Tagliasacchi, A., Delame, T., Spagnuolo, M., Amenta, N.,
and Telea, A. (2016). 3d skeletons: A state-of-the-
art report. In Proc. of the 37th Annual Conference
of the European Association for Computer Graphics,
EG’16, pages 573–597.
Theussl, T., M
¨
oller, T., and Gr
¨
olle, M. E. (2001). Opti-
mal regular volume sampling. In Proc. Visualization,
VIS’01, pages 91–98.
Subfield-based Parallel Kernel-thinning Algorithms on the BCC Grid
295
