
Safety, Security and Performance Assessment of Security
Countermeasures with SysML-Sec
Bastien Sultan
1
, Ludovic Apvrille
1
and Philippe Jaillon
2
1
LTCI, T
´
el
´
ecom Paris, Institut Polytechnique de Paris, Sophia-Antipolis, France
2
Mines Saint-Etienne, CEA-Tech, Centre CMP, F - 13541 Gardanne, France
Keywords:
Formal Verification, Impact Assessment, Countermeasures, Attacks, Safety, Security, Performance.
Abstract:
Deploying security countermeasures on Cyber-Physical Systems (CPS) can induce side-effects that can exceed
their benefits. When CPS are safety-critical systems, performing efficiency and impact assessments of security
countermeasures early in the design flow is essential. The paper introduces the W-Sec method, based on
SysML-Sec. The W-Sec method consists in two interwoven formal modeling and verification cycles aiming
at providing countermeasures with objective and quantitative efficiency and impact assessments in terms of
safety, security and performance. The paper evaluates the W-Sec method with an autonomous rover swarm
case-study, and finally discusses the method’s strengths and weaknesses highlighted by the case-study results.
1 INTRODUCTION
Cyber-physical systems (CPS) can commonly act
on their environment with actuators. As a result,
a cyber attack on these systems can induce severe
safety consequences on their environment. Thus, for
these systems, bridging safety and security model-
ing and analysis is of prime importance to capture
the inter-relations between safety and security, lead-
ing to better designs and easing maintenance. This
joint safety/security modeling of complex systems
has become a trending research topic over the past few
years. In this context, the CAPE program
1
(one of the
four scientific programs of the European Union Hori-
zon 2020 project SPARTA) aims at providing meth-
ods for joint specification and assessment of security
and safety properties for complex CPS.
Part of this program, the main contribution of the
paper, is a new method (called “W-efficiency and im-
pact assessment method”, W-Sec method for short)
targeting the selection of the right security counter-
measures
2
for CPS. By relying on the modeling for-
malisms and tools supporting the SysML-Sec frame-
1
Continuous Assessment in Polymorphous Environ-
ments.
2
In this paper, a security countermeasure is any modifi-
cation brought to a system in order to mitigate one or several
vulnerabilities. This modification can be related to the sys-
tem’s software, hardware, processes, and/or to its physical,
logical and network architecture.
work (Apvrille and Roudier, 2013), our contribution
can now improve the impact assessment method in-
troduced in (Sultan et al., 2018). The W-Sec method
brings two main improvements to this method: (i) re-
ducing models complexity while enhancing the model
precision for hardware and security aspects and (ii)
widening its assessment basis through more fine-
grained security analyses. Formal models of W-Sec
include two abstraction levels: component and over-
all system levels, from which formal verification of
safety, security and performance can be performed.
The rest of the paper is organized as follows. Sec-
tion 2 gives an overview of the related works. Then
Sect. 3 introduces the W-Sec method. Section 4
presents the autonomous rover swarm case-study, in-
cluding the attack scenarios and countermeasures, we
used to evaluate the W-Sec method. It also presents
the formal models we have designed: (1) a joint
rover hardware and software model, and (2) a platoon
model allowing to represent rovers’ high-level behav-
ior and interactions within the swarm. Last, Sect. 5
discusses the results of the W-Sec method applied to
the rovers platoon case-study.
2 RELATED WORKS
The interest of assessing efficiency and impact of se-
curity countermeasures before their deployment has
been discussed for a long time (Brykczynski and
48
Sultan, B., Apvrille, L. and Jaillon, P.
Safety, Security and Performance Assessment of Security Countermeasures with SysML-Sec.
DOI: 10.5220/0010832300003119
In Proceedings of the 10th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2022), pages 48-60
ISBN: 978-989-758-550-0; ISSN: 2184-4348
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Small, 2003; Nicol, 2005) and several ways to select
countermeasures have been proposed. (Nespoli et al.,
2017) provides a survey on the optimal countermea-
sures selection methods proposed between 2012 and
2016. Regarding the countermeasures’ (negative) im-
pacts, these approaches mainly focus on the monetary
cost of the countermeasures, yet several of them ex-
press the impacts in terms of system downtime or im-
pacts on the provided services, e.g. in terms of confi-
dentiality, integrity, availability and performance. De-
pending on the methods, these impacts can be used
as inputs of the selection method (thus they are not
computed on the basis of the countermeasure descrip-
tion but chosen on the basis of a human analysis),
or computed. However, even if the “collateral dam-
age” (Gonzalez-Granadillo et al., 2015) are assessed
by some of the surveyed approaches, none of them
seem to allow for a precise enough countermeasures
impact assessment with respect to the behavior of the
system, which is critical regarding CPS. For instance,
when assessing a software patch affecting the driving
controller of an autonomous car, it is crucial to quan-
tify how the speed or steering set points can be mod-
ified as well as to evaluate the availability of the con-
troller. Incidentally, to the best of our knowledge, few
research works published after this survey address the
finding of precise and objective impact assessments
for countermeasures.
Among them, (Sultan et al., 2018) proposes a for-
mal verification-based impact assessment method for
security countermeasures, in the context of naval sys-
tems. This method relies on a network of UPPAAL
timed automata (NTA) (Behrmann et al., 2004) used
to model a cyber-physical system. When a vulner-
ability affecting the modeled system is discovered,
NTA is mutated into a set of mutant NTAs repre-
senting (i) the vulnerable system, (ii) the vulnerable
system enhanced with security countermeasures mit-
igating the vulnerability, (iii) the realization of suc-
cessful attacks on the original vulnerable system, and
(iv) the realization of these attacks on the “patched”
systems. Afterwards, the NTA (modeling the CPS)
and the mutant NTAs (modeling the CPS affected by
the cyber events) are model-checked against a set of
properties: the impacts of the cyber events and the ef-
ficiency of the countermeasures can then be deduced
by comparing the model-checks results. However, as
the authors explain in (Sultan, 2020), the underlying
modeling framework lacks in expressiveness with re-
spect to data security aspects (e.g., data confidential-
ity is modeled in a simplistic way by a boolean vari-
able depicting an illegitimate access to the the com-
ponent which processes the data). Therefore, the rel-
ative security properties verification results may be
not accurate enough. In addition, establishing a fine-
grained modeling with timed automata can be time-
consuming and error-prone, and the resulting models
can be complex to understand as they encompass het-
erogeneous aspects in a single modeling view.
Addressing these flaws requires requires more ap-
propriate modeling formalisms and tools. Provid-
ing a framework for designing safe and secure em-
bedded systems, the SysML-Sec method (Apvrille
and Roudier, 2013) relies on an enhanced SysML-
based modeling formalism that allows for model-
ing high-level system architectural and behavioral as-
pects, as well as fine-grained hardware ones. More-
over, SysML-Sec is tailored to produce joint safety,
security and performance analyses (Apvrille and Li,
2019) and is fully supported by the toolkit TTool, that
provides the system designers with a graphical and
easy-to-use modeling and verification interface. In
addition, it also provides distinct modeling views that
can help simplifying the system models. For these
reasons, we believe that the SysML-Sec language and
TTool are the best underlying formalism and toolkit
for enhancing the method proposed in (Sultan et al.,
2018). Furthermore, another reason for choosing this
formalism and tools is that our contribution can also
complement the SysML-Sec method. Indeed, the at-
tack model considered by this method is the Dolev-
Yao one (Dolev and Yao, 1983), thus other kinds
of attacks such as “sequence[s] of exploitation of
vulnerabilities of several components” (Apvrille and
Roudier, 2013) are considered out of scope. Thanks to
the introduction of the modular attack scenarios like
in (Sultan et al., 2018), our contribution then widens
the considered attack corpus.
3 W-SEC METHOD
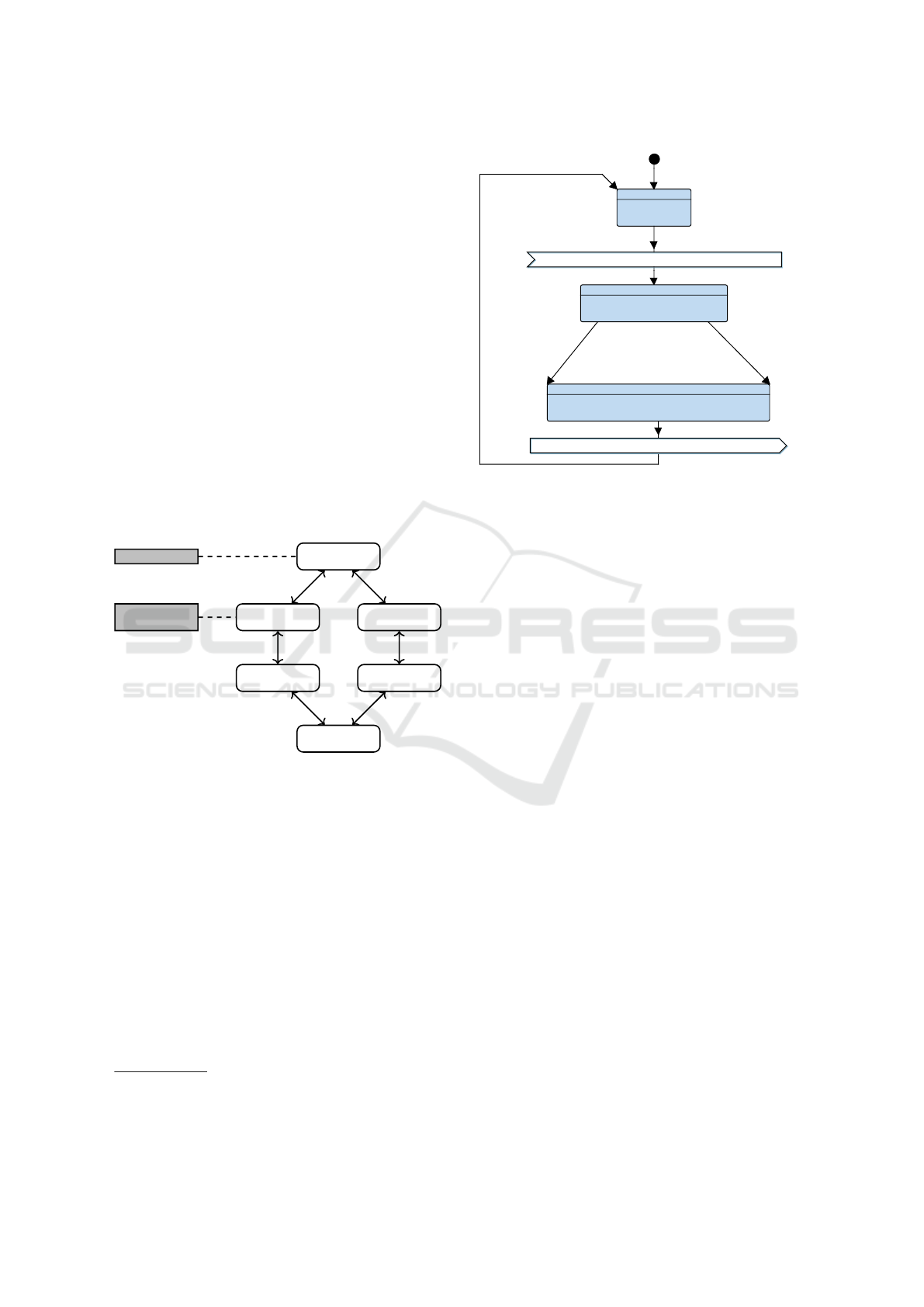
The method introduced in this section (see Fig. 1),
called W-efficiency and impact assessment method
(or W-Sec method for short), relies on two interwo-
ven modeling and verification cycles aiming at (i) de-
signing relevant models of a complex system and (ii)
providing efficiency and impact assessments of coun-
termeasures in terms of safety, security and perfor-
mance. The following paragraphs describe its stages.
3.1 System Modeling
Like in (Sultan et al., 2018), a comprehensive model-
ing of the whole system is first built. However, unlike
this approach, our modeling approach does not rely on
a single network of timed automata (NTA). The sin-
gle model approach indeed has two main drawbacks:
Safety, Security and Performance Assessment of Security Countermeasures with SysML-Sec
49

Components models
(HW/SW par-
titioning)
Attack scenarios
+ Countermea-
sures description
System model
+ all test scenarios
(High-level design)
Components models
+ Attacks
+ Countermeasures
Regression
assessment
(w.r.t. performance)
Security assessment
System model
+ Countermeasures
+ all test scenarios
System model
+ Attacks
+ relevant test sc.
System model
+ Attacks
+ Countermeasures
+ relevant test sc.
System model
+ Attacks
+ Countermeasures
+ relevant test sc.
Regression
assessment
(w.r.t. safety)
Efficiency
assessment
(w.r.t. safety)
: Model enrichment
: Simulation (with TTool internal simulator)
: Model-checking (with ProVerif)
: Model-checking (with TTool internal model-checker)
: Feedback to components, system, countermeasures and attacks models
Figure 1: The W-Efficiency and Impact Assessment Method.
first, it requires the modeling of heterogeneous items
(e.g. software and hardware) and aspects (e.g., data
security and system safety) with the same formalism.
As a result, the modeling effort can be substantial and
the model can lack in precision with respect to one of
the modeled aspects, for instance data security as dis-
cussed in Sect. 2. Second, formal verification or sim-
ulation of such a model may be pointlessly complexi-
fied when evaluating safety, security and performance
properties (e.g., the output values of an algorithm can
be needed when analyzing its safety, while they can
be useless when assessing its performance). To tackle
these two issues, we have chosen to rely on two dis-
tinct modeling views provided by TTool and used in
the SysML-Sec method, thus capturing the systems
high-level and low-level aspects with more precision
and facilitating the separation of concerns. One view
targets the hardware/software (HW/SW) partitioning
at a component level. We use it to precisely model
the system’s components (e.g., a PLC, a workstation,
etc.), and we have chosen to carry out the perfor-
mance and security assessments in this view: hard-
ware modeling is obviously needed to assess a sys-
tem’s performance, and veryfing the security prop-
erties we want to assess (i.e., integrity, authenticity
and confidentiality of data when transferred between
two components or processed by a component) means
verifying a resistance to attacks, including hardware-
related attacks (e.g. putting a probe on a bus). This
view includes models relying on SysML-Sec block
diagrams, sequence diagrams and activity diagrams.
The other view is dedicated to high-level system de-
sign. We use it to model the system overall behav-
ior and architecture, and to perform the safety assess-
ments at system level. This view relies on SysML-Sec
block diagrams and state machine diagrams.
1. The HW/SW partitioning view is used to
model the system’s components low-level applica-
tion architecture and behavior, as well as their sup-
porting hardware platforms. In this view, each com-
ponent is modeled thanks to three models (Enrici
et al., 2017) depicting its functions
3
, its hardware
platform, and the communication protocols it uses for
data transfer between its hardware subcomponents
4
(i.e., DMA transfer protocols). These three models
3
Note that the functional model focuses both on the ex-
change of information between applicative tasks and on the
computational cost of algorithms (i.e. actual arithmetic op-
erations are not modeled). For instance, if a task receives
a value and then performs a multiplication by 2, the activ-
ity diagram of this task contains a read action in a channel
followed by a one-multiplication complexity operator.
4
In this paper, a hardware subcomponent refers to the
hardware nodes that are used in SysML-Sec to model hard-
ware architectures (e.g., CPUs, memories, FPGAs).
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
50

are then linked in a fourth one (the mapping model)
which assigns software tasks to CPUs, communica-
tion protocols between memories, etc. In addition,
in order to assess the external communications secu-
rity, we integrate a simple model of the communica-
tion interfaces with the components modeling (e.g.,
a socket in the functional model and a network in-
terface controller in the hardware model) belonging
to the external components with which the compo-
nent communicates. Thus, the models of this view
are built on the basis of the information that is neces-
sary to precisely depict the software and hardware ar-
chitecture of the modeled components, as well as the
low-level security (i.e., cryptographic algorithms, pri-
vacy of the hardware buses, memories for key storage,
etc.) and performance (e.g., algorithm computational
cost and hardware platform specification) aspects. Fi-
nally, this view also features the security and perfor-
mance properties. These properties are established in
parallel with the HW/SW partitioning models design.
Their verification enables to assess the low-level se-
curity and performance impacts of countermeasures
and attacks.
2. The High-level system design view is used to
model the system high-level architecture
5
and behav-
ior, with a focus on the interactions between system
components and on the system’s descriptive variables
(e.g., for a rover, its speed and coordinates) evolution.
Then the relevant arithmetic parts of the components
algorithms can be modeled and even system dynamics
(e.g. simplified modeling of speed and position) can
be abstracted through integer variables
6
. Therefore,
the information basis used to build the system model
encompasses the relevant information at system-level
(e.g., regarding system’s functions, dynamics and net-
work topology), and, if needed, at component-level in
order to depict the high-level behavior of the compo-
nents algorithms (i.e., the evolution of their output pa-
rameters depending on their inputs). In other words,
we exclude from these models the the low-level hard-
ware, security and algorithmic complexity aspects. In
addition, the safety properties at system-level, estab-
lished in parallel with the system model design, are
captured in this view. Their verification enables to
assess the high-level safety impacts of countermea-
sures and attacks. Note that if several test scenarios
are needed to evaluate all these properties, then sev-
eral system models must be built, i.e. one per test
scenario.
Last, note that in the current state of our research,
the semantic links between the HW/SW partitioning
5
i.e., the relations between the system’s components.
6
Note however that only simple dynamics can be mod-
eled in this way.
models and the high-level system design models are
not explicit, thus it falls to the user to ensure the con-
sistence of the models of both views while designing
them.
3.2 Integrating Attacks and
Countermeasures through
Enrichment of Models
The second stage of our method consists in integrating
the attacks and countermeasures with the models of
both views (high-level system design view, HW/SW
partitioning view). This integration consists in mod-
eling the attacks and countermeasures in SysML-Sec,
and then, in the current state of our works, to manu-
ally compose these new models with the pre-existing
system and components models. For instance, a coun-
termeasure consisting in encrypting a given commu-
nication channel can be modeled in the HW/SW par-
titioning view with two encrypt and decrypt SysML-
Sec actions: this countermeasure is thus integrated
with the models by adding the encrypt/decrypt ac-
tions before and after the relevant pre-existing send
and receive actions in the pertinent SysML-Sec activ-
ity diagrams. In the same way, attacks can for in-
stance be modeled in the high-level system design
view through a SysML-Sec block (which state ma-
chine diagram models the successive attack stages)
that is then bound to the relevant pre-existing blocks
in the enriched models, and if needed through a mod-
ification of the state machines of these blocks (in or-
der to model the behaviors that are now possible due
to the attack). Note that due to the absence of in-
teger variables in the HW/SW partitioning view, the
repercussions of attacks on the outputs of the system
algorithms, or on the system dynamics, can only be
modeled in the high-level system design view.
Like the NTA in (Sultan et al., 2018), the high-
level system models are turned into the following
three classes of models (see Fig. 1):
• System models with countermeasures. As we want
to assess the potential regression due to the counter-
measures with respect to each test scenario, we pro-
duce one model per countermeasure and per sce-
nario, i.e., if we have m test scenarios and n coun-
termeasures, m × n models are built.
• System models with attacks. For each attack, we
select the relevant test scenarios
7
then one model is
produced per selected test scenario.
7
i.e., the system configurations on which we want to as-
sess (i) the attack safety impacts and (ii) the related coun-
termeasures efficiency.
Safety, Security and Performance Assessment of Security Countermeasures with SysML-Sec
51

• System models with attacks and countermeasures.
For each countermeasure (as a patch can actu-
ally mitigate several attacks), we build a “patched”
model for every element of the system models with
attacks subset. In other words, if we have p system
models with attacks and n countermeasures, p × n
models are built.
In addition, the models of the HW/SW partition-
ing view are also turned into a set of new models. For
each countermeasure, and for each component tar-
geted by the countermeasure, the component’s func-
tional model is enriched to integrate the countermea-
sure. Then, an attack scenario leading to the counter-
measure triggering is integrated with this new model.
3.3 Performing Safety, Security and
Performance Assessment
The third and last stage of the method consists in per-
forming simulation and formal verification of the pre-
viously enriched models.
We carry out security and performance assess-
ments on the models of the components (i.e., of
the HW/SW partitioning view). First, simula-
tions are performed with the TTool HW/SW simu-
lator (Apvrille et al., 2006). These simulations pro-
vide, both for the “nominal” component model and
for the component with countermeasures models, a
set of performance assessments (e.g., the number of
CPU clock cycles for a given algorithm). Thanks to
the comparison of these results the additional com-
plexity of the modeled countermeasures can be eval-
uated, with respect to the hardware platform and in
terms of clock cycles or elapsed time. Second, the se-
curity properties are verified with ProVerif (Blanchet,
2001) thanks to an integrated HW/SW partitioning
models to ProVerif specification translation (Li, 2018;
Lugou et al., 2016), once again both for the “nom-
inal” component model and for the component with
countermeasures models. Note that if the security and
performance assessments show that the component’s
high-level behavior is modified by the evaluated coun-
termeasure (e.g., if this countermeasure leads to com-
putational overhead that excessively delays the out-
puts of the component’s algorithms), the models of
the high-level system design view may be adjusted in
order to take these modifications into account as they
can impact the system’s safety. In that case, the safety
assessments (see below) shall be carried out on these
adjusted models.
In addition, the system models (i.e., of the high-
level system design view) are checked with the TTool
internal model-checker (Calvino and Apvrille, 2021)
against the safety properties. As in (Sultan et al.,
2018), these safety verification operations aim at:
• evaluating functional regressions induced by coun-
termeasures by comparing the results of the verifi-
cations of the system models with countermeasures
and the “nominal” system models designed at the
first step.
• and then, from the comparison of the results of the
model-checking of the system models with attacks
and the system models with attacks and counter-
measures, assessing the countermeasures ability to
mitigate the attacks.
At the end of this stage, we obtain a set of evalu-
ations that enables to determine the subset of the in-
put attacks that can be effective on the system, and
to determine the optimal countermeasure or combina-
tion of countermeasures. If the impact and efficiency
assessments show that no countermeasure is satisfac-
tory, the models of both views can incrementally be
modified and re-assessed until they verify the desired
properties: in this way, the modeled countermeasures
can be improved and then modified/developed to be
deployed on the system.
3.4 Improvements Brought by the
Method
Table 1: Comparison with SysML-Sec and (Sultan et al.,
2018)
Modeling formalism From SysML-Sec
and (Enrici et al.,
2017)
Two-views modeling From SysML-Sec
Separation in two views of
safety at system-level vs. se-
curity and performance as-
pects
W-Sec method con-
tribution
Use of HW/SW partitioning
view for low-level compo-
nent modeling
W-Sec method con-
tribution
Attacks and countermea-
sures modeling through
model enrichment
From (Sultan et al.,
2018)
Impact assessment approach From (Sultan et al.,
2018)
As explained hereinabove, the W-Sec method uses
elements from SysML-Sec and (Sultan et al., 2018)
(see Table 1). By merging these two approaches, the
method brings several improvements to each of them.
Indeed, with regards to (Sultan et al., 2018):
• The W-Sec method reduces the models complex-
ity because it does not rely on a single NTA but on
several models that can separately be simulated and
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
52

verified. These models are based on two distinct
views which only contain the information needed
for their respective purposes (i.e., safety assess-
ment at system-level or security and performance
assessment), and do not aggregate all this informa-
tion in a single view.
• Hardware modeling relies on configurable tem-
plates already defined in TTool (CPU, memories,
DMA, etc.) so it helps reducing the modeling time
and effort, while giving more precision to the mod-
els with respect to the NTA approach.
• Low-level security aspects can be captured in a
more fine-grained way. In addition, this low-level
security modeling is facilitated thanks to TTool
predefined security-related patterns (e.g., crypto-
graphic algorithm models or hardware firewall
blocks).
• Thanks to the simulation and verification tools pro-
vided by TTool, our approach assesses the impact
of countermeasures and attacks, with respect to a
widened property basis. Indeed, we can now eval-
uate fine and low-level security properties (e.g., re-
lated to the integrity of a data transfer, or the confi-
dentiality of a component data).
Furthermore, the W-Sec method completes the
SysML-Sec method thanks to the integration of mod-
ular attack scenarios like in (Sultan et al., 2018).
When designing a countermeasure, the W-Sec method
can therefore be used before the SysML-Sec design
stage.
4 THE AUTONOMOUS ROVER
PLATOON CASE-STUDY
4.1 Description of the Case-Study
4.1.1 The Platoon and its Rovers
The case-study relies on the SPARTA/CAPE Con-
nected and Cooperative Cars system (Dupont et al.,
2020). In concrete terms, we consider a platoon com-
posed of three vehicles (one leader and two follow-
ers) driving in cooperative adaptative cruise-control
(CACC) mode. The three vehicles we model are au-
tonomous rovers designed by Fortiss in cooperation
with Tecnalia (Dupont et al., 2020; Martinez et al.,
2021; L
´
ucio et al., 2018). The hardware architecture
of these rovers relies on two Raspberry Pi 3B+ (one
for the driving algorithms and the other one for pro-
cessing images produced by the camera), three kinds
of sensors (a camera, a LIDAR and ultrasonic dis-
tance sensors), a DC motor and a steering servo mo-
tor. In a CACC mode, a rover can act as a leader. In
that case, the rover regulates its speed and trajectory
using information received by its sensors. If a rover
is a follower, then it has to adapt its speed according
to the speed value received from the leader and gap
information received from its sensors, and its trajec-
tory according to the sensed information. It shall also
brake whenever it receives an emergency brake (EB)
message from the leader. Note that in our model we
assume that a follower only relies on the speed value
received from the leader to adapt its speed.
In order to assess the impact of attacks and coun-
termeasures on safety, we have selected three sce-
narios derived from the Basic Scenario described
in (Martinez et al., 2021) (“the platoon [...] navigates
on a straight road” and “the goal of [an attacker] is to
cause a crash between two legitimate vehicles”). We
also assume that communications between vehicles
are not signed nor timestamped, and that the leader
only sends speed update or emergency brake (EB)
messages to the followers. Our three platooning sce-
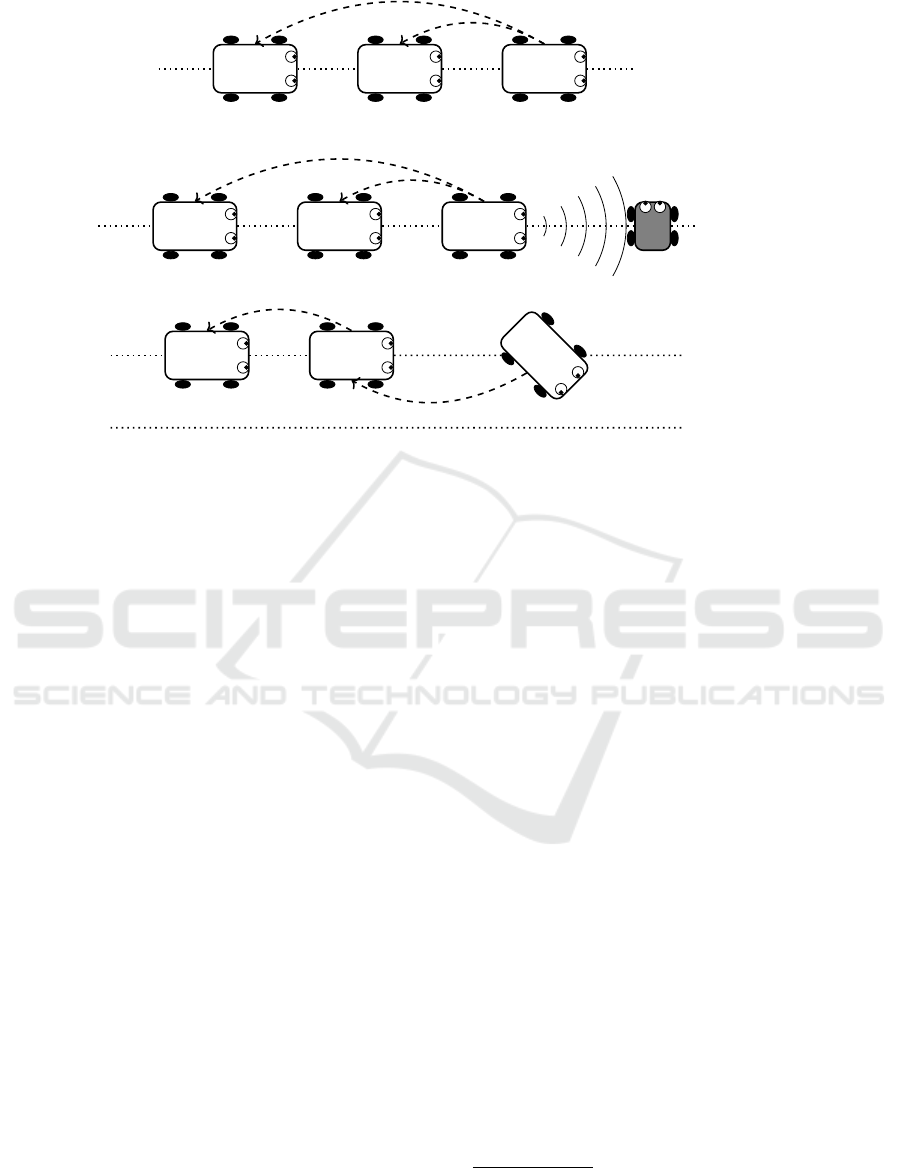
narios and can be summarized as follows (see Fig. 2):
(a) a simple scenario where the three rovers run in
a straight lane. The leader (Rover
1
) continuously
sends its speed value to the followers (Rover
2
and
Rover
3
) so that they can adapt their speed on the
basis on the received value. In this scenario, the
leader can keep a constant speed (scenario (a
1
)),
decelerate (scenario (a
2
)) or accelerate (scenario
(a
3
)).
(b) a scenario where a vehicle crosses the platoon lane
in front of the leader. In the first steps of the sce-
nario, the leader sends its speed value to the fol-
lowers like in scenario (a). Then, when the vehicle
crosses the lane, the leader detects it, brakes and
sends EB messages to the followers. Last, when
the vehicle has finished to cross the lane, the leader
restarts and sends its speed value to the followers.
(c) a scenario where the leader (Rover
1
) leaves the pla-
toon. It joins the leaving rovers lane and sends a
leaving message to the followers. The immediate
following vehicle (Rover
2
) becomes the new leader
and continuously sends its speed value to its fol-
lower (Rover
3
).
4.1.2 Attack Scenarios and Countermeasures
In addition to these platooning scenarios, we have
implemented four of the attack scenarios described
in (Martinez et al., 2021). We consider a Dolev-
Yao (Dolev and Yao, 1983) adversary model: an at-
tacker can thus eavesdrop, modify, block or inject
Safety, Security and Performance Assessment of Security Countermeasures with SysML-Sec
53
Rover
3
(flwr)
Rover
2
(flwr)
Rover
1
(ldr)
Platoon lane
(a) Simple scenario
Rover
3
(flwr)
Rover
2
(flwr)
Rover
1
(ldr)
Platoon lane
(b) Crossing vehicle scenario
Rover
3
(flwr)
Rover
2
(ldr)
Rover
1
(leaving)
Platoon lane
Leaving
rovers lane
(c) Platoon splitting scenario
Figure 2: CACC Platoon Scenarios.
messages. Attacks are:
• Attack 1: the attacker modifies the speed update
messages sent by the leader to the followers by
adding a large deviation to the legitimate value.
• Attack 2: the attacker modifies the speed update
messages sent by the leader to the followers by
adding a small deviation to the legitimate value.
• Attack 3: the attacker injects false EB messages
bound for the first follower. In our implementation,
the attacker performs this attack by changing the
speed update messages sent to the first follower into
EB messages.
• Attack 4: the attacker blocks the EB messages sent
by the leader to the followers. In our implementa-
tion, this attack is performed by changing the EB
messages into speed update messages.
We also have implemented several countermea-
sures in order to mitigate these attacks. They can be
classified into two groups:
• Plausibility Checks
Speed Plausibility Check: this countermeasure
has been introduced in (Martinez et al., 2021) and
consists in checking if the speed update value re-
ceived by the followers “deviates from a given per-
centage w.r.t. the average of the last n speed values
received by the vehicle” (Martinez et al., 2021). If
it is the case, the message is discarded and the rover
relies on the last legitimate received speed value to
elaborate its actuators commands.
Emergency Brake Plausibility Check: (Martinez
et al., 2021) mentions a sensor-based plausibility
check. We have chosen to implement such a coun-
termeasure, working as follows: (1) when the first
EB message is received, the follower checks if the
three next gap measurements decrease. If it is not
the case, the EB message is discarded. If it is the
case, the EB message is considered as legitimate,
the rover brakes and the current gap measurement
is recorded. (2) When the next EB message is re-
ceived, it is considered as legitimate if the current
gap measurement is less than or equal to the previ-
ously recorded gap measurement
8
. If it is not the
case, the recorded gap measurement will be set to
0 and the successive gap checks will be performed
as for the first iteration.
Emergency Brake Plausibility Check with Gap
Check: as the previous countermeasure can re-
sult in platoon crashes under certain conditions (see
Sect. 5), we have designed an alternative version
enhanced with an additional safety check. Before
each speed order is sent to the actuators, this safety
check verifies if the gap measured ahead of the
rover is greater than a given threshold. If it is not
the case, an emergency brake is performed.
• Cryptographic Countermeasures: these counter-
8
This check is performed in order to avoid a crash be-
tween the leader and the first follower if the leader sends
two successive legitimate EB messages (e.g., if a slow ve-
hicle crosses the road ahead of the leader).
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
54
measures have been proposed by (Li, 2018), in a
context of autonomous connected vehicles security.
MAC: for each message sent by the leader, a mes-
sage authentication code (MAC) is added in order
to allow the followers to check the messages au-
thenticity and integrity.
Symmetric Encryption with Nonce Exchange:
for each message sent by the leader to a given
follower, a nonce is exchanged and then the mes-
sage is encrypted with a symmetric encryption al-
gorithm (AES) and the nonce is concatenated. This
countermeasure ensures confidentiality of the mes-
sages, provides anti-replay protection and allows
the followers to check their authenticity and in-
tegrity.
If the integrity/authenticity check fails, the rover re-
lies on the last legitimate received message to elab-
orate its actuators commands.
4.2 Modeling the Platoon
Platoon net-
work model
Rover
1
soft-
ware model
...
Rover
3
soft-
ware model
Rover
1
dy-
namics model
...
Rover
3
dy-
namics model
Environment
model
Attackers models
Countermeasures
models
Figure 3: Structure of the platoon model (High-level system
design profile).
In this case-study, we consider that the system is the
platoon, and its components are the rovers. Thus, the
platoon model we have built (in the high-level sys-
tem design view) relies on four kinds of SysML-Sec
blocks (see Fig. 3):
• The Rover Software Models. These blocks depict
the high-level logic behavior of the rovers: their
state-machines model the network communications
and the driving algorithms. But since they are high-
level models, the algorithms are not represented in
a fine-grained way: e.g., we do not model the PID
9
control loops and we consider that, for a given con-
trolled parameter (e.g., speed), the command val-
ues are directly equal to the final set point val-
9
Proportional, Integral, Derivative control, elaborating
a command relying on the current, past and foreseen error
values.
idle
PlausibilityCheckIn(messageType, messageContent)
sendingCheckedMessage
PlausibilityCheckOut(messageType, messageContent)
[10*messageContent < 13*averageSpeed]
leaderSpeed1 = leaderSpeed2
leaderSpeed2 = leaderSpeed3
leaderSpeed3 = messageContent
[else]
messageContent = leaderSpeed3
averageSpeed = (leaderSpeed1 + leaderSpeed2 + leaderSpeed3)/3
checkingSpeedValue
Figure 4: State machine of a block modeling the Speed
Plausibility Check.
ues and the actuators directly reach these command
values.
• The Rover Dynamics Models, used to abstract the
evolution of the rover’s coordinates and gap value
(ahead of the robot). For each rover, the software
model block and the dynamics model block ex-
change signals through their SysML ports, in order
to simulate the rover’s sensors acquisition cycle.
• The Platoon Network Model. This block mod-
els the communications between the leader and its
followers. To this end, the rover software model
blocks exchange signals with the network block
through their bound SysML ports: in our model,
a communication between two robots Rover
a
and
Rover
b
will be modeled by two successive signals
exchanges Rover
a
software model → platoon net-
work model → Rover
b
software model.
• The Environment Model, intended to link the
rover dynamics model blocks through bound
SysML ports. Thanks to this block, the rover dy-
namics models exchange their coordinate values in
order to update their gap value.
Note that in order to make the platoon model eas-
ily scalable, we have defined two libraries (i.e., block
patterns that can be instantiated through “regular”
blocks) depicting the rover-related models. Actually,
the rover software model and rover dynamics model
blocks are instances of these two libraries.
In addition, the attacks have been modeled by
enriching the platoon network model block, and the
countermeasures have been depicted through enrich-
ments of the rover software model library (see Fig. 3),
or by adding countermeasure blocks bound to the
Safety, Security and Performance Assessment of Security Countermeasures with SysML-Sec
55

rover software model instances (see Fig. 4). Given
our test scenarios, attacks and countermeasures, we
have built 50 distinct platoon models.
4.3 Modeling the Rover
In this case-study, we consider that a rover is a compo-
nent. As seen in Sect. 3, a SysML-Sec HW/SW parti-
tioning model consists in four distinct “sub-models”.
Therefore, we have designed the following models in
order to depict our rover:
• The Rover Functional Model. We have mod-
eled the driving algorithms, including message ex-
changes and interpretation, data fusion from the
sensors, PID controllers for speed and heading and
emergency brake controller. The functional model
also includes an abstraction of the sensors’ behav-
ior (i.e., continuous data sending) as well as an ab-
straction of the actuators behavior (i.e., continuous
data reception).
• The Rover Platform Model. Our hardware model
mainly focuses on the Raspberry Pi dedicated to ex-
ecute the driving algorithms
10
. We have modeled
the Raspberry SoC (with a 4-core CPU, a GPU,
a DMA controller, a bus and a memory block) as
well as the sensors and actuators (with CPU, bus
and memory blocks). The I/O devices (sensors and
actuators) are linked to the SoC through a main bus
and bridges.
• The Communication Model. We assume that the
Raspberry Pi SoC and the I/O devices communi-
cate through DMA transfer protocols.
• The Mapping Model, bridging the three previous
ones.
In addition, we have modeled the attack scenar-
ios and countermeasures by adding tasks to the rover
functional model and by modifying the pre-existing
tasks. Note that the countermeasures algorithms have
been modeled according to the worst-case perfor-
mance, i.e. if, for a given algorithm, the number of
executed instructions depend on the value of a given
input variable, we always consider that this variable
is set to a value leading to the highest number of ex-
ecuted instructions. Given our test scenarios, attacks
and countermeasures, we have built 6 distinct rover
models.
Table 2: Verification results for security properties.
Contermeasure
Property Weak
auth.
Strong
auth.
No countermeasure 7 7
MAC 3 7
Symm. Encr. + Nonce 3 3
Speed Plausibility Check 7 7
Emergency Brake PC 7 7
EB PC with Gap Check 7 7
5 RESULTS AND DISCUSSION
This section discusses the application of the third
stage of our method, i.e. assessing the impacts and ef-
ficiency of countermeasures thanks to the simulation
and verification of these models. We have verified and
simulated the behavior of our rovers on 21 consecu-
tive operating cycles
11
. This number of operating cy-
cles has been chosen to suit the hardware limitations
of the computer we used to verify the models: as the
models of the high-level system design view rely on
unbounded integer variables (coordinates and gaps),
the verification computational cost increases with the
number of rovers operating cycles. Apart from lim-
iting the number of operating cycles, other strategies
could have been used to handle the combinatory ex-
plosion, such as bounding the evolution of variables.
However, the 21 operating cycles were enough to sim-
ulate all platooning scenarios, to identify one rover
collision for each attack, and to observe impacts of the
selected countermeasures, thus providing the safety,
security and performance results to evaluate our ap-
proach.
5.1 Performance Assessment
Performance assessment aims at comparing the over-
head cost, in terms of operating cycles duration, of the
countermeasures. In order to carry out performance
measurements, two breakpoints have been added in
the rover functional model of the HW/SW partition-
ing view. The first one is placed on the “read in chan-
nel” action modeling a leader message reception, and
the second one on the “read in channel” action mod-
eling the reception of a power command by the actua-
tors. Thus, if the first breakpoint is reached after n ns
and the second breakpoint is reached after m ns, then
it takes m −n ns for the rover to perform an operating
10
Since the countermeasures will be mapped to this Ras-
bperry Pi, its SoC constitutes our target of evaluation.
11
An operating cycle is the sequence of actions starting
at the reception of sensed data and/or a leader message and
ending at the next command execution by the actuators.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
56

cycle. We have then measured this difference for each
of the 21 operating cycles and for each rover configu-
ration (i.e. the “unpatched” and the 5 “patched” con-
figurations).
To have a fair comparison, we have also enforced
the following for the patched rover model:
• to integrate to each rover model an attack scenario
systematically leading to the use the countermea-
sure
• to model the countermeasures so that they always
lead to the driving actions (i.e., always elaborate
speed and trajectory commands).
Table 3: Average elapsed time between the two consecutive
breakpoints (ns).
Without any countermeasure 274
With MAC 1,019
With Symm. Encryption + Nonce 646
With Speed Plausibility Check 357
With Emergency Brake PC 344
With EB PC with Gap Check 391
Table 3 gives, for each rover configuration (i.e.,
with or without countermeasures), the average du-
ration of the operating cycles, and thus the induced
overhead. These durations are consistent with our
expectations: the cryptographic countermeasures in-
duce more operations, thus they imply has a higher
computation cost than the plausibility checks. Yet,
these overhead costs are all acceptable since acqui-
sition cycles of the rover’s sensors are far greater
than these values (the minimal acquisition cycle be-
ing 3,704 μs (Dupont et al., 2020; Garmin, 2016)).
Therefore, with respect to performance aspects, all
the countermeasures are compatible with the perfor-
mance requirements of the rovers.
5.2 Security Assessment
Given the chosen attack scenarios (i.e., modifications
of the messages exchanged between the leader and
the followers), we have decided to evaluate the secu-
rity of the followers’ incoming communications. To
this end, we have integrated a simple software task
simulating the leader’s network behavior, and a sim-
ple leader hardware model on which this task is ex-
ecuted, with the models of the HW/SW partitioning
view. This hardware model is linked to the rover’s one
through a public bus: this bus depicts the unprotected
platoon network. The software task is linked to the
rover’s tasks through two communication channels.
We have assessed the two following properties related
to the downlink channel: Weak authenticity (i.e. in-
Table 4: Safety properties verification results.
Scenario
Attack
No att. Att. 1 Att. 2 Att. 3 Att. 4
Scenario (a
1
) —
Scenario (a
2
) — —
Scenario (b) — —
Scenario (c) — — — —
(a) Without countermeasure
Scenario
Attack
No att. Att. 1 Att. 2 Att. 3 Att. 4
Scenario (a
1
) —
Scenario (a
2
) — —
Scenario (b) — —
Scenario (c) — — — —
(b) With Speed Plausibility Check
Scenario
Attack
No att. Att. 1 Att. 2 Att. 3 Att. 4
Scenario (a
1
) —
Scenario (a
2
) — —
Scenario (b) — —
Scenario (c) — — — —
(c) With Emergency Brake Plausibility Check
Scenario
Attack
No att. Att. 1 Att. 2 Att. 3 Att. 4
Scenario (a
1
) —
Scenario (a
2
) — —
Scenario (b) — —
Scenario (c) — — — —
(d) With Emergency Brake PC + Gap Check
Scenario
Attack
No att. Att. 1 Att. 2 Att. 3 Att. 4
Scenario (a
1
) —
Scenario (a
2
) — —
Scenario (b) — —
Scenario (c) — — — —
(e) With MAC or with Symm. Encr. + Nonce Exchange
tegrity), and Strong authenticity (i.e. data integrity
and data origin authenticity). Indeed, these two prop-
erties indicate, respectively, if an attacker could fal-
sify a message, and if an attacker could falsify and/or
replay a message, without the follower being able to
detect any of these attacks.
The verification results are given in Table 2. They
confirm that the implementation of the MAC counter-
measure provides the rover’s incoming network com-
munications with weak authenticity, while the imple-
mentation of the Symmetric Encryption with Nonce
Exchange ensures a strong authenticity. Therefore,
with respect to the security requirements, the latter
should be selected.
5.3 Safety Assessment
We have chosen to focus our safety assessment on the
two most critical safety properties of the platoon: (i)
the gap between Rover
1
and Rover
2
is always strictly
positive and (ii) the gap between Rover
2
and Rover
3
is always strictly positive (i.e., no crash can occur be-
tween Rover
1
and Rover
2
, and between Rover
2
and
Rover
3
). The verification of these properties enables
to evaluate if the attacks (which aim is to cause a pla-
toon crash) are successful on the rovers, if the coun-
termeasures can actually mitigate them, and if they
could lead to the worst regression (i.e., a crash under
Safety, Security and Performance Assessment of Security Countermeasures with SysML-Sec
57

nominal driving conditions)
12
. Table 4 summarizes
the verification results for each rover configuration.
Each cell depicts the results for a given hplatooning
scenario, attack scenarioi pair, and is divided into two
subcells: the first subcell represents the property 1
verification, and the second the property 2 verifica-
tion. If the subcell is green, then the property is veri-
fied; if the subcell is red, the property is not verified.
For instance, Table 4 (a) indicates that when attack 3
occurs in platoon scenario (b), there is no crash be-
tween Rover
1
and Rover
2
, but a crash occurs between
Rover
2
and Rover
3
. According to these results:
None of the countermeasures leads to a safety
regression under normal conditions (see the “No at-
tack” column of each table).
Speed plausibility check only mitigates attack 1
in scenario (a
1
). That seems consistent since this
countermeasure makes the followers rely on the last
legitimate leader message: as in scenario (a
2
), the
leader decelerates while the attack is carried out, the
followers rely on a speed value higher than the actual
leader speed.
EB Plausibility Check only mitigates attack 3 in
scenario (a
1
), but not in scenario (b). These verifica-
tion results led us to design the next countermeasure.
EB Plausibility Check with gap check mitigates
all the attacks. These results are obvious since the
countermeasure makes the followers brake when their
measured gap value is smaller than a given threshold.
The two cryptographic countermeasures miti-
gate attacks 1, 2 and 3 in scenario (a
1
) but do not mit-
igate them, nor attack 4, in the other tested scenarios.
That seems logical since they make the followers rely
on the last legitimate leader message if they detect a
received message alteration. Indeed, in hscenario (b),
attack 4i Rover
2
and Rover
3
detect that the incoming
speed message has been modified. But since they rely
on the last legitimate message that has been a speed
update message, they continue to run while Rover
1
is braking when the intruder crosses the lane. Then
in hscenario (b), attack 3i Rover
2
detects that the in-
coming EB message has been modified. But after the
intruder has crossed the lane, the last legitimate mes-
sage received by Rover
2
is an EB message. So it con-
tinues to brake and that leads to a collision with its
follower Rover
3
. Finally, in hscenario (a
2
), attacks 1
and 2i the followers rely on a last legitimate speed
value higher than the actual leader speed as for Speed
Plausibility Check. Note that for hscenario (a
2
), at-
tack 2i, property 2 is not verified while it is veri-
fied for the “unpatched” rover (see Table 4 (a)). This
seems to indicate a safety regression but it is actually
12
Note that these two properties are insufficient for pre-
senting cases where a countermeasure deteriorates safety.
due to the 21 operating cycles limitation: a simula-
tion on 42 operating cycles also leads to a crash be-
tween Rover
2
and Rover
3
in the “no countermeasure”
configuration. Thus, for hscenario (a
2
), attack 2i the
cryptographic countermeasures only make this crash
occur sooner. This can easily be explained since in
the “unpatched” configuration, Rover
3
will adapt its
speed on the basis of the received speed value which
is the leader speed slightly increased by the attacker.
For instance, if the leader runs at 10 mph then decel-
erates down to 5 mph, Rover
2
and Rover
3
will run at
12 mph and then decelerate down to 7 mph. But with
cryptographic countermeasures enabled, Rover
2
and
Rover
3
will elaborate their driving commands on the
basis of the last legitimate received speed value, i.e.
10 mph: in the end, they will run faster than in the
“unpatched” configuration so the collision between
the leader and Rover
2
, and then Rover
2
and Rover
3
,
will occur sooner. The fact that the 21 operating cy-
cles were not enough to observe this crash constitutes
a weakness of our choice to rely on unbounded inte-
ger variables for modeling the rovers’ dynamics.
5.4 Discussion
This platoon case-study is interesting to evaluate the
W-Sec method, e.g. to analyze the relations between
safety, security and performance requirements and
mechanisms. Indeed, thanks to safety verification, we
were able to show that all the attack scenarios were
successful on the platoon and that the designed coun-
termeasures were not as efficient as expected: for in-
stance, the Speed Plausibility Check was designed to
mitigate attack 1 but we showed that under certain
conditions (i.e., if the leader decelerates while the at-
tack is carried out), it can lead to a platoon crash. In
addition, the method helped us in improving the EB
Plausibility Check: safety assessment results showed
that the improved EB Plausibility Check was more ef-
ficient, and performance assessment results showed
that its overhead cost was still acceptable. This shows
the importance of the joint safety-performance analy-
sis, thus of the interleaving of the two modeling and
verification cycles. Broadly speaking, these two ex-
amples show the interest of the W-Sec method for
designing security countermeasures or merely assess-
ing the impact of existing ones. Also, the case-study
highlighted the interest of the W-Sec method regard-
ing the performance assessment: thanks to the mea-
surements, we were indeed able to establish that the
rover model enhanced with countermeasures still re-
spects performance properties. Finally, the case-study
fully illustrates the relevance of joint safety-security
analysis: the assessment of cryptographic counter-
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
58

measures showed that even if the attacked commu-
nication channel is provided with integrity, authentic-
ity and anti-replay protection, the attacks could still
lead to a crash depending on the platooning scenario
and on the countermeasures implementation. Here,
the main implementation problem lies in the fact that
the rover systematically relies on the last legitimate
received message when it detects that the current mes-
sage has been altered.
But this case-study also identified several remain-
ing weaknesses of the method. Firstly, depending on
the modeling choices for the models of the high-level
system design view, we can face a combinatorial ex-
plosion when verifying safety properties. In our case-
study, this was due to the unbounded integer variables
used to model the rovers’ coordinates and gap values.
To tackle this issue, we have decided to limit the num-
ber of operating cycles. However, this leads to incom-
plete safety verifications with respect to the whole at-
tack sequence: for instance, as explained in the pre-
vious subsection, depending on the hplatooning sce-
nario, attack scenarioi pair, a crash between Rover
2
and Rover
3
can occur after 21 operating cycles. The
simulation then helped to analyse and complete the
verification results. Yet, this shows that it is impor-
tant to analyze the scope of the verification results.
Secondly, if our safety property basis was relevant
for assessing the impacts of the attacks and then the
efficiency of the countermeasures, it was insufficient
to obtain a comprehensive countermeasures safety re-
gression assessment. In general, further safety prop-
erties are needed to perform a complete regression
assessment. For instance, it should have been inter-
esting to systematically check reachability and live-
ness properties for all states of the SysML-Sec state-
machines, and to compare, for each countermeasure,
the results of this verification performed on the “un-
patched” and on the “patched” model.
Thirdly, as the model enrichment (i.e., their com-
position with attack scenarios and countermeasures
models in the second stage of the method) is not au-
tomated, human intervention is needed to carry them
out. Depending on the initial system and components
models, attack scenarios and countermeasures, that
could be time-consuming —especially as we produce
up to three enriched system models per test scenario
as explained in Sect. 3: for instance, we produced
47 enriched models for this case-study. However,
the transformations were simple (add a block, change
variables updates or guards in the state-machines,
etc.) and as TTool provides the user with conve-
nient functions (e.g., models or objects cloning), we
were able to perform the needed models’ enrichment
quickly. Still, the reduction in the number of needed
enriched models shall be studied in future works: for
instance, we could design a single test scenario en-
compassing all the atomic test cases and so assess all
the countermeasures at once.
Fourthly, if we can assess the safety and perfor-
mance impacts of a wide variety of attacks, the se-
curity formal verification only evaluates the impact
of a Dolev-Yao attacker. For instance, verifying the
confidentiality of data processed by a component is
done by verifying the confidentiality of data transfers
within this component (i.e., between its hardware sub-
components). That is enough to model eavesdropping
attacks targeting the component’s buses. Yet, we still
cannot evaluate the security impacts of more complex
attack scenarios, e.g. side-channel attacks.
Finally, regarding the safety assessments, the W-
Sec method focuses on safety verification at system-
level, in the high-level system design view. There-
fore, the hardware platform is not taken into account
for safety verification. Yet, the hardware architecture
of a system’s component may obviously impact its
safety. We can imagine a countermeasure that pre-
vents a component from reaching a given state due
to performance issues. In that case, the performance
assessment will detect the computational overhead in-
duced by the countermeasure. However, a safety as-
sessment at component-level should be led in order to
make sure that the state is not reachable. Then, if this
safety issue impacts the outputs of the component’s
algorithms, the countermeasure model in the high-
level system design view shall be enriched to take
it into account. Since the SysML-Sec approach in-
cludes post-mapping safety verification (Apvrille and
Li, 2019), future works may focus on the joint appli-
cation of SysML-Sec and W-Sec methods to address
this limitation.
6 CONCLUSIONS
The W-Sec method, introduced in this paper, allows
CPS designers and maintenance engineers to assess
the efficiency and impacts of security countermea-
sures. It relies on two distinct modeling views help-
ing in reducing the models complexity, and on for-
mal methods for providing objective and quantita-
tive assessments regarding three aspects: safety, secu-
rity and performance. By combining their strengths,
the W-Sec method enhances the method presented
in (Sultan et al., 2018) and complements the SysML-
Sec method. Its relevance has been illustrated by an
autonomous rover platoon case-study.
Yet further works are needed to address its limi-
tations. As mentioned in Sect. 5, we intend to study
Safety, Security and Performance Assessment of Security Countermeasures with SysML-Sec
59

the reduction in the number of needed enriched mod-
els while still correctly assessing safety, security and
performance impacts. We will also investigate the au-
tomation of the enrichment stage. Furthermore, we
will work on the identification of the links between
the two modeling views. Regarding the assessment
stage, the security assessment of more complex attack
scenarios, the automated generation of properties and
the design of metrics allowing to easily compare the
verification and simulation results are three improve-
ment perspectives we intend to explore. Finally, we
intend to evaluate the method on other case-studies
that can help in comparing the assessment results with
the impacts observed on real systems.
ACKNOWLEDGEMENTS
This work has been funded by the EU H2020 project
SPARTA. We gratefully thank Fortiss and Yuri Gil
Dantas for their kind help and support.
REFERENCES
Apvrille, L. and Li, L. W. (2019). Harmonizing safety, secu-
rity and performance requirements in embedded sys-
tems. In 2019 Design, Automation & Test in Europe
Conference & Exhibition (DATE), pages 1631–1636.
IEEE.
Apvrille, L., Muhammad, W., Ameur-Boulifa, R., Coud-
ert, S., and Pacalet, R. (2006). A uml-based environ-
ment for system design space exploration. In 2006
13th IEEE International Conference on Electronics,
Circuits and Systems, pages 1272–1275. IEEE.
Apvrille, L. and Roudier, Y. (2013). SysML-Sec: A SysML
Environment for the Design and Development of Se-
cure Embedded Systems. In APCOSEC 2013, Yoko-
hama, Japan.
Behrmann, G., David, A., and Larsen, K. G. (2004). A
tutorial on uppaal. Formal methods for the design of
real-time systems, pages 200–236.
Blanchet, B. (2001). An Efficient Cryptographic Proto-
col Verifier Based on Prolog Rules. In 14th IEEE
Computer Security Foundations Workshop (CSFW-
14), pages 82–96, Cape Breton, Nova Scotia, Canada.
IEEE Computer Society.
Brykczynski, B. and Small, R. A. (2003). Reducing
internet-based intrusions: Effective security patch
management. IEEE software, 20(1):50–57.
Calvino, A. T. and Apvrille, L. (2021). Direct model-
checking of sysml models.
Dolev, D. and Yao, A. (1983). On the security of public key
protocols. IEEE Transactions on Information Theory,
29(2):198–208.
Dupont, S., Maroneze, A., Massonnet, P., Nigam, V., Plate,
H., Sykosch, A., Cakmak, E., Thanasis, S., Jim
´
enez,
V., Amparan, E., Martinez, C., L
´
opez, A., Garc
´
ıa-
Alfaro, J., Segovia, M., Rubio-Hernan, J., Blanc, G.,
Debar, H., Carbone, R., Ranise, S., Verderame, L.,
Spaziani-Brunella, M., Yautsiukhin, A., Morgagni,
A., Klein, J., Bissyande, T., and Samhi, J. (2020). As-
sessment specifications and roadmap. Technical re-
port.
Enrici, A., Apvrille, L., and Pacalet, R. (2017). A model-
driven engineering methodology to design parallel and
distributed embedded systems. ACM Transactions on
Design Automation of Electronic Systems (TODAES),
22(2):1–25.
Garmin (2016). Lidar lite v3 operation manual and techni-
cal specifications. Technical report.
Gonzalez-Granadillo, G., Garcia-Alfaro, J., Alvarez, E., El-
Barbori, M., and Debar, H. (2015). Selecting opti-
mal countermeasures for attacks against critical sys-
tems using the attack volume model and the rori index.
Computers & Electrical Engineering, 47:13–34.
Li, L. (2018). Safe and secure model-driven design for em-
bedded systems. PhD thesis, Universit
´
e Paris-Saclay.
L
´
ucio, L., Kanav, S., Bayha, A., and Eder, J. (2018). Con-
trolling a virtual rover using AutoFOCUS3. In Pro-
ceedings of the MDETools Workshop co-located with
MODELS 2018, volume 2245 of CEUR Workshop
Proceedings, pages 356–365.
Lugou, F., Li, L. W., Apvrille, L., and Ameur-Boulifa,
R. (2016). Sysml models and model transformation
for security. In 2016 4th International Conference
on Model-Driven Engineering and Software Develop-
ment (MODELSWARD), pages 331–338. IEEE.
Martinez, C., Maroneze, A., Massonnet, P., Dupont, S.,
Grandclaudon, J., Nigam, V., Dantas, Y.-G., Plate,
H., Sykosch, A., Ohm, M., Cakmak, E., Athanasios,
S., Jim
´
enez, V., Amparan, E., L
´
opez, A., Apvrille,
L., Blanc, G., Debar, H., Bisegna, A., Carbone, R.,
Verderame, L., Ranise, S., Bernardinetti, G., Palam
`
a,
I., Pellegrini, A., Restuccia, G., Sirbu, G., Yaut-
siukhin, M. S.-B. A., Poretti, C., Klein, J., and Samhi,
J. (2021). Demonstrators specifications. Technical re-
port.
Nespoli, P., Papamartzivanos, D., M
´
armol, F. G., and Kam-
bourakis, G. (2017). Optimal countermeasures selec-
tion against cyber attacks: A comprehensive survey on
reaction frameworks. IEEE Communications Surveys
& Tutorials, 20(2):1361–1396.
Nicol, D. (2005). Modeling and simulation in security eval-
uation. IEEE Security & Privacy, 3(5):71–74.
Sultan, B. (2020). Ma
ˆ
ıtrise des correctifs de s
´
ecurit
´
e pour
les syst
`
emes navals. PhD thesis, Ecole nationale
sup
´
erieure Mines-T
´
el
´
ecom Atlantique Bretagne Pays
de la Loire.
Sultan, B., Dagnat, F., and Fontaine, C. (2018). A method-
ology to assess vulnerabilities and countermeasures
impact on the missions of a naval system. In Com-
puter Security, pages 63–76, Cham. Springer Interna-
tional Publishing.
MODELSWARD 2022 - 10th International Conference on Model-Driven Engineering and Software Development
60
