
Optimizing Heterogeneous Maritime Search Teams using an
Agent-based Model and Nonlinear Optimization Methods
Jarrod Grewe
1a
and Igor Griva
2b
1
Department of Computational and Data Sciences, George Mason University,
4400 University Dr Fairfax VA, U.S.A.
2
Department of Mathematical Sciences, George Mason University, 4400 University Dr Fairfax VA, U.S.A.
Keywords: Search Theory, Optimization, Search and Rescue, Agent-based Modeling, Search Planning.
Abstract: This paper introduces a new search planning methodology, nicknamed Pathfinder, that can optimize
heterogeneous teams of mobile and stationary searchers. Unlike previously developed search methods, the
new methodology applies an Agent-Based Model (ABM) to simulate target movement and behavior then uses
nonlinear optimization methods to find optimal search plans for complex teams of searchers. We describe
initial target location with a probability distribution influenced by evidence and environmental data. The ABM
models target movement based on environmental and behavioral factors. Then, Pathfinder suggests a search
plan that maximizes the probability of target detection and satisfies searcher requirements.
1 INTRODUCTION
Search Theory was initially developed during World
War 2 by B.O. Koopman to assist with creating
optimal search strategies to find German U-boats
(Koopman, 1946 (declassified in 1958)) Search
Theory has advanced significantly in the past 75 years
to include most elementary searcher types and target
types (see, (Stone, Royset, & Washburn, Optimal
Search for Moving Targets, 2016)) for a
comprehensive review. Historically, the Office of
Naval Research (ONR) has been a driving force in
Search Theory research in the United States. The
USCG was one of the first organizations to deploy a
computerized methodology for search and rescue
(SAR) operations called Computer-Assisted Search
Planning System (CASP) (Richardson & Discenza,
1980). This used a Monte Carlo particle method to
model targets. In 2003 the USCG started
development of the Search and Rescue Optimal
Planning System (SAROPS) (Kratzke, Stone, &
Frost, 2010) to replace CASP. SAROPS was a
significant improvement over the USCG’s CASP
system by incorporating a custom numerical search
technique to find search plans and improving the
a
https://orcid.org/0000-0002-9807-2410
b
https://orcid.org/0000-0002-2291-233X
Monte Carlo particle method used to model targets.
This methodology has been operational since January
2007.
In more recent times, more methodologies in
Search Theory were developed that accommodate
more search scenarios. One of them is the genetic
simulated annealing algorithm (GSAA). (Ai, Li, Gao,
Xu, & Shang, 2019) Another one is based on branch-
and-bound algorithms. (Sato & Royset, 2010) There
is also a new interactive heuristic-based optimization
model (Abi-Seid, Morin, & Nilo, 2019) created to
assist SAR operations in Canada. Nonlinear
optimization has been applied to search theory
research, in particular, finding hidden objects (El-
Hadidy & Alfreedi, 2020). At the same time nonlinear
optimization techniques have not yet been fully
utilized to optimize heterogeneous teams of mobile
and stationary searchers.
An important component in any search theory
methodology, that optimizes search plans to find a
mobile target, is how it models target movement.
Traditionally diffusion processes have been popular
see (Lin & Goodrich, 2010) and (Eagle, 1984).
Currently a particle method is used by SAROPS.
(Kratzke, Stone, & Frost, 2010). Some research has
been done to apply an Agent-Based Model (ABM) to
200
Grewe, J. and Griva, I.
Optimizing Heterogeneous Maritime Search Teams using an Agent-based Model and Nonlinear Optimization Methods.
DOI: 10.5220/0010869100003117
In Proceedings of the 11th International Conference on Operations Research and Enterprise Systems (ICORES 2022), pages 200-207
ISBN: 978-989-758-548-7; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

model wilderness searches (Mohibullah & Julie,
2013). In addition, some case studies have been done
to apply agent-based simulations to maritime search
operations as a way to improve verification and
validation methods. (Onggo & Karatas, 2016)
Most relevant research in adopting ABM in
maritime environments is focused on military and
security applications. This includes port security
(Harris, Dixon, Dunn D.L., & Romich, 2013) and
using UAVs for surface surveillance (Steele, 2004).
In addition, several papers have been published in
regards to force protection simulations including
(Walton, Paulo, McCarthy, & Vaidyanathn, 2005)
and (Sullivan, 2016). Finally, there has been several
papers published on the use of ABM and counter-
piracy operations (Dabrowski & Villiers, 2015) and
(Marchione, Johnson, & Wilson, 2014). A common
issue encountered by this line of research is in
verification and validation of these models. For
example, in analysing strategies to protect merchant
ships from pirate attack (Deraeve, Anderson, & Low,
2010).
In the past 20 years, Search Theory has been used
multiple times to find missing aircraft. The search for
Air France, which was lost in June 2009, was found
using Search Theory. (Stone, In Search of Air France
Flight 447, 2011) The flight recorders were recovered
in May 2011. Currently Search Theory is used every
day by the USCG to find missing persons along the
US coastlines using SAROPS.
We propose a new search planning methodology
based on an Agent-Based Model (ABM) and
nonlinear optimization techniques. Pathfinder
introduced in this paper strives to advance search
planning by focusing on 4 core areas:
1. optimizing heterogeneous teams of mobile and
stationary searchers
2. modeling target behavior
3. inherent searcher safety
4. enhance future research, training, and
appropriations
Pathfinder incorporates an ABM that can model
target movement based on behavioral factors, besides
environmental factors. This is important because the
behavior of missing targets could fall into different
scenarios such as, for example dropping an anchor or
clinging onto a buoy (Adlerstein, 2019). Therefore,
by incorporating various scenarios in the ABM,
Pathfinder can model a more realistic target
movement. The second important feature of
Pathfinder is that it employs nonlinear optimization
methods to find optimal search plans based on
modeled target movement. Furthermore, employment
of nonlinear optimization methods allows us to
optimize teams of heterogeneous searchers, including
stationary and mobile searchers together, among
other benefits, including not constraining Pathfinder
to using ladder pattern search plans and rectangular
search areas. The ladder pattern searches may include
regions of least concern (Kratzke, Stone, & Frost,
2010) and thus can be less efficient. Pathfinder finds
search paths that maximize the probability of
detection (POD) with the flexibility of adding
constraints and penalties, that help find search paths
that are realistic and easy to implement. This
flexibility of the methodology allows searchers to
focus on regions of high POD. In addition, Pathfinder
can strengthen the optimization model to address
concerns and demands of naval pilots and SAR
personnel. Another important feature of Pathfinder is
that it can accommodate searcher safety. For
example, additional modifications can guarantee that
searchers do not come within a dangerous distance
from each other. Finally, since Pathfinder can
efficiently simulate thousands of different scenarios,
it can be used for SAR research, training,
appropriations, and evaluation of new equipment and
techniques.
We organized the paper as follows. The next
section reviews a search scenario that will help
explain Pathfinder, Section 3 reviews Pathfinder,
Section 4 discusses results, Section 5 provides
concluding remarks, and Section 6 discusses how
Pathfinder could be further improved and
transformed into a new life saving application.
2 SEARCH SCENARIO
Imagine being a search manager that creates,
implements, and manages SAR operations. It is a
normal summer day at a popular beach location,
warm with clear skies. There is a strong wind due
north at 10knots. This day the currents are strong,
with a west to east flow. Then a distress signal was
received and a search operation needs to be launched.
The call is from a recreational boat with people on
board that have possibly experienced a health issue.
This boat is not far from the coastline and the caller
indicates they are heading to a pier along the
coastline. The call was interrupted and further
communication attempts were unsuccessful. We
estimate the boat is no longer being actively sailed
and may have lost power. The last known location
was estimated by triangulating the emergency radio
call. Suppose the search assets available, and modeled
Optimizing Heterogeneous Maritime Search Teams using an Agent-based Model and Nonlinear Optimization Methods
201
in Pathfinder, are short range assets like the MH-60
“Jayhawk” (Pike, n.d.) and search boats like the 47-
foot Motor Lifeboat. (MLB). (Motor Lifeboat (MLB),
n.d.). We also include a theoretical “smart buoy”
which represents a stationary searcher. We will
demonstrate the feasibility and benefits of this new
methodology by finding optimal search plans for this
search scenario.
3 DETAILED DESCRIPTION OF
PATHFINDER AND ITS
COMPONENTS
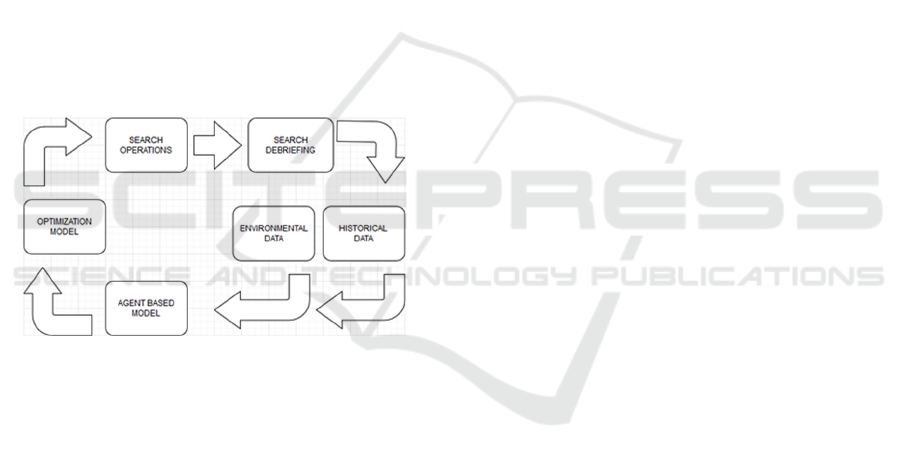
There are two principal components of Pathfinder.
The optimization model and the ABM. The ABM
simulates a large number of possible scenarios of a
target trajectory, and then sends the information to the
optimization model, which then creates optimal
search plans for the search operation. Figure 1 shows
the relationship of these components to search
operations and data.
Figure 1: The two principal components of Pathfinder,
ABM and optimization model, and their relationship with
available data and search operations.
3.1 Domain
We need to discuss a few fundamental definitions.
Pathfinder uses a two-dimensional domain to model
the search area.
𝛺∈𝑅
Searchable subdomains are constructed to limit
searchers from areas they are not allowed, such as
foreign or restricted territories. We define this area,
𝛺
𝑠
, such that
𝛺
𝑠
⊆𝛺.
In our case the searchable sub domain is the same
as the domain. In addition, the domain is a coastline
that is mostly maritime environment that is 1,000
𝑘𝑚
2
.
We define our searcher paths 𝑧
𝑡
𝑘
,𝑡1,..,𝑇 for
searcher 𝑘1,…,𝐾 and target paths 𝑢
𝑡
𝑔
,𝑡
1,…,𝑇 for target g of G targets to satisfy the
following.
𝑢
𝑔
∈𝛺
𝑧
𝑘
∈𝛺
𝑠
3.2 Prior Distribution
To describe the position of the target before the search
starts we use a initial probability distribution 𝜃𝑥,
which could be based, in particular, on a targets last
known location. To add more accuracy and
flexibility, we use regions defined as 𝑅
𝑖
⊆𝛺 with
probabilities 𝑎
𝑖
. This is useful when there are several
sources of information, evidence, and the chance of
error. These regions satisfy the probability that the
target is in the domain 𝑀.
𝑎
𝜃𝑥𝑑𝑥
𝑀𝑎𝑛𝑑 𝑎
1
(1)
For example, in our scenario, we have two
circular regions representing the last known location
at the center of the domain. A large 40% region with
a radius of 4.15 km, where there is a 40% chance the
target was in that region at 𝑡0. Then a smaller 50%
region within it with a radius of 1.65 km where there’s
is a 50% chance the target was there at 𝑡0. The rest
of the domain falls within a 10% region where there
is a 10% chance that a target is there. The 40% and
50% regions will reside in the center of the search
domain.
3.3 Agent-based Model
This prior distribution is used in an ABM to model
target movement. This model uses numerous
independent agents that are affected by
environmental factors, behavioral factors, and
hazards.
First, environmental factors are wind and currents
that are in our search area. The wind the currents in
our example will push these agents north then east.
The ABM uses equations from the USCG (USCG,
2013) to calculate leeway speed and can incorporate
the Rayleigh Method (Kratzke, Stone, & Frost, 2010)
in the future. The ABM also incorporates hazards
such as rocks and etc. that agents must navigate
around. In our example, there are no hazards to
navigate around.
There are also behavioral factors. These
behavioral factors depend on survival modes to model
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
202

target movement. When most people are lost they rely
on a survival strategy to survive or find their way
home. These include overdue, travel aid, route
finding, wandering, and staying put. In our example,
overdue, travel aide, wandering, and stay put are seen.
When a target is overdue, it is not lost at all and are
simply late getting home or their next waypoint. The
travel aide mode is when a target has some travel aids
and has the ability to eventually self-rescue. This
mode relies on the theory of “bounded rationality”
(Simon, 1982) According to this theory, rationality is
bounded due to data and mental capabilities. Thus, a
missing person’s idea of a path home is more accurate
as they approach future waypoints. Wandering is
when a target does not have travel aids and wonders
the domain. Finally, the stay put mode is when a
target decides to stay where they are. In the case of a
boat this could be implemented by using an anchor or
beaching the boat. The ABM provides us with our
estimate target paths 𝑢
𝑡1,…,𝑇 that will be used
to optimize search plans.
This is unlike current methodologies that
implement particle methods. Particle methods use
particles that move based on environmental factors
and hazards. Therefore, particle methods cannot
model intelligent agents that can make decisions.
With an ABM, the agents are intelligent and can think
and make decisions. Thus, we can model behavioral
factors. The ABM can also model targets that decide
to change survival modes and target type changes.
Therefore, an ABM can model far more target types
accurately than a particle method.
In our example the ABM is using 501 agents to
model target movement. Such a number provides
sufficient map coverage and also shows a variety of
target behaviors while being within the technical
capability of the test system.
3.4 Detection Function
Next, we model the probability that a searcher at 𝑧
will detect a target at 𝑢
at time 𝑡 . This is
implemented using a detection function, which
depends on several factors including time, distance,
visibility, and properties of the target. Some previous
methodologies use the idea of sweep widths, lateral
ranges, etc. See (Frost & Stone, 2001). In Pathfinder,
we use a modification of the inverse Nth power law
(Iida, 1993) below, because it gives us a lot of
flexibility.
𝛤𝑢
,𝑧
,∆𝑡1exp
∆𝑡
,
,
,
,
,
,
(2)
𝑛
∗
0,𝛼
∗
0,∆𝑡0,𝑧
∈𝛺
,𝑢
∈𝛺
This function depends on time step ∆𝑡, target type
𝑢
, searcher type 𝑧
, visibility 𝑣, terrain type 𝜏𝑧
,
and the parameters 𝛼
∗
and 𝑛
∗
. For notational
simplicity we also define the probability of not
detecting a target as below:
𝛤
𝑢
,𝑧
,∆𝑡1 𝛤𝑢
,𝑧
,∆𝑡 (3)
Since our example is a marine search operation,
we used data for a missing boat (N. C. Edwards,
1981) and found some of these values.
For example, for a USCG Point Class cutter
searching for a 16-foot boat or orange life raft in a
maritime terrain, n and 𝛼 were found as 𝛼0.413
and 𝑛5.955 . Likewise, for a USCG HH-52
helicopter searching for a 16-foot boat or orange life
raft in a maritime terrain, n and 𝛼 were found as 𝛼
0.471 and 𝑛3.656.
Both of these search assets are retired by the
USCG so future data collection and analysis is
needed.
3.5 Optimization Model
The objective of the Pathfinder methodology is to
find optimal searcher paths, 𝑧
𝑡
𝑘
,𝑡1,…,𝑇, that
maximize the POD. These paths depend on target
paths from the ABM, 𝑢
𝑡
𝑔
,𝑡1,…,𝑇, and the
detection function. We call a collection of searcher
paths a search plan. This POD function is as follows:
𝐹
𝑧
1/|𝐺|𝛤𝑢
,𝑧
,∆𝑡
|
|
𝜞
𝑢
,𝑧
,∆𝑡
|
|
∆
(4)
This objective function is a modification of the
objective function found in (Ding & Castanon, 2018)
and follows the theory in (Przemieniecki, 2000) page
277.
To make the objective function produce realistic
search trajectories, we incorporate three penalty terms
for fuel, momentum, and center-of-mass. The fuel
penalty below is used to make more cost-effective
search trajectories and cut down on suboptimal
waypoints.
𝑃
𝑧
𝑃
‖𝑧
𝑧
‖
|
|
(5)
𝑤ℎ𝑒𝑟𝑒 𝑃
0 𝑓𝑜𝑟 𝑠𝑒𝑎𝑟𝑐ℎ𝑒𝑟 𝑘
Optimizing Heterogeneous Maritime Search Teams using an Agent-based Model and Nonlinear Optimization Methods
203

The following is the momentum penalty. This
penalty reduces zig-zagging and generally smooths
paths and make them easier to follow.
𝑃
𝑧
𝑀
𝑃
𝑧
2𝑧
𝑧
𝛥𝑡
|
|
(6)
𝑤ℎ𝑒𝑟𝑒 𝑀
0 𝑓𝑜𝑟 𝑠𝑒𝑎𝑟𝑐ℎ𝑒𝑟 𝑘
𝑎𝑛𝑑 𝑃
0 𝑓𝑜𝑟 𝑠𝑒𝑎𝑟𝑐ℎ𝑒𝑟 𝑘
Finally, the center-of-mass penalty eliminates
erratic search trajectory and helps the nonlinear
optimization model converge to a solution.
𝑃
𝐶𝑀
𝑧
𝑡
𝑘
𝑃
𝑘
𝐶𝑀
‖𝑧
𝑡
𝑘
𝑎𝑣𝑔𝑢
𝑡
𝑔
‖
2
𝑇/𝛥𝑡
𝑡1
|𝐾|
𝑘1
(7)
𝑤ℎ𝑒𝑟𝑒 𝑃
0 𝑓𝑜𝑟 𝑠𝑒𝑎𝑟𝑐ℎ𝑒𝑟 𝑘
𝑤ℎ𝑒𝑟𝑒 𝑎𝑣𝑔𝑢
1
𝐺
𝑢
With these 3 penalty terms we have the following
Pathfinder’s optimization model with the positive
weights 𝑤
𝐹
, 𝑤
𝑀
, and 𝑤
𝐶𝑀
.
Maximize:
𝐹
𝑧
𝑤
𝑃
𝑧
𝑤
𝑃
𝑧
𝑤
𝑃
𝑧
(8)
Subject to:
Movement constraints on the searchers
with 𝜀
𝑠
,𝜏
𝑧
0 implying a
stationary searcher
‖
𝑧
𝑡
𝑘
𝑧
𝑡1
𝑘
‖
2
𝜀
𝑠
𝑘
,𝜏
𝑧
𝑡1
𝑘
0, 𝑓𝑜𝑟 𝑘 𝑠𝑒𝑎𝑟𝑐ℎ𝑒𝑟
Initial locations constraints on the searchers
𝑧
0
𝑘
𝑍
0
𝑘
𝑓𝑜𝑟 𝑠𝑒𝑎𝑟𝑐ℎ𝑒𝑟 𝑘
Final locations constraints on the searchers
𝑧
𝑇
𝑘
𝑍
𝑇
𝑘
𝑓𝑜𝑟 𝑠𝑒𝑎𝑟𝑐ℎ𝑒𝑟 𝑘
4 DISCUSSION OF RESULTS
To examine search trajectories calculated by
Pathfinder, we built a prototype to run experiments,
described in figure 1. We used NetLogo (Wilensky,
1999) for the ABM module and a nonlinear solver
MINOS (Murtagh & Saunders, 1978) and AMPL
(AMPL Optimization inc, 2021) for the Optimization
module. The computer being used is a Dell Alienware
M17 with 8GB of ram and an Intel i7-9750H
processor. We experiment with several search teams
to find optimal solutions to the search scenario
described in this paper. We were able to find optimal
solutions for several scenarios. Here we demonstrate
one of them.
The ABM performed as expected. The
environmental factors move agents that have lost
power and have not deployed an anchor, some agents
are moving to their destination when they have
power, and some of them employ an anchor if they
are in shallow water. Of the two target types in this
scenario, boat with power and a boat without power,
the model shows 3 distinct behaviors a missing boat
could employ. We can see these behaviors below.
Figure 2: visualization of target behavior including A)
agents being swept away by the current and wind B) Agents
heading to their final destination under their own power C)
agents that decided to deploy an anchor and stay put. D)
agents being blown away primarily by the wind. E) the
center-of-mass of target agents with direction.
Figure 2 also shows another important advantage
of using an ABM to model target behavior. When
searching for a missing boat, that boat may or may not
have power, it may have deployed its anchor, it may
have capsized, it may have sunk, there could be life
rafts in the water, or the passengers may be in the
water. Therefore, there are multiple target types that
the SAR operations could be looking for, with several
distinct behaviors each target could inhibit. Using the
ABM is beneficial to search operations because it can
model simultaneously all potential target types, target
behaviors, and the transition of one target type to
another. This ABM has the potential to be tuned and
optimized by employing historical data.
Using nonlinear optimization techniques,
Pathfinder can optimize a search operation with
searchers with radically different capabilities. Figure
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
204

3 is a search operation optimized with Pathfinder and
has 3 assets: a helicopter, a boat, and a “smart” buoy
that can detect targets. Also note that there is an
operations outpost from which the helicopter is
operating from. This is also an asset that can detect a
target while stationary, thus not optimized by
pathfinder but its detection abilities considered in the
model. This search plan's POD is 8.08% and shows
that this new methodology can optimize teams of
mobile and stationary searchers.
Figure 3: A helicopter (orange), boat (yellow), operations
outpost (blue), and one buoy (green) searching the domain.
Note the difference in travel distance in each searcher type.
Pathfinder utilized each searcher's performance to find an
optimal search plan. Also note how the search plans were
affected by the target center-of-mass moving to the
Northeast.
Figure 3 also demonstrates how the target
movement affects the search plans. The target center-
of-mass is moving to the Northeast and as agents
encounter the currents in the North of the map, they
immediately move East. Thus, the search plan skews
North East.
One of the important features of Pathfinder is
attaining searchers’ safety since the optimization
model can separate searchers by imposing constraints
on the search trajectories. For example, the search
plan visualized in figure 4, we use two helicopters
based near each other for a search. Pathfinder found
an optimal search plan below for which the
helicopters never crossed paths.
Figure 4: Two helicopters (yellow/orange) searching the
domain. Note that the helicopters never crossed paths.
Another benefit of employing a computational
methodology is that it can perform simulations on
new SAR assets and methods. For example,
Pathfinder can determine what would be better: a
helicopter that is 10% faster or a helicopter that has
10% better sensors? We ran a few experiments with
the prototype using the same initial search plans as
figure 3 without the boat and buoy. Pathfinder could
show, for example, that a 10% increase in speed gives
us a search plan with a POD of 5.6% and a helicopter
that is 10% better at detecting targets gives us a search
plan with a POD of 6.2%. Thus, in this search
scenario, a helicopter with 10% better sensors is more
beneficial than those that are 10% faster. Thus,
Pathfinder can find what assets are the most effective
and consider the costs of using them. These are
important questions to address (Biesecker, 2021) This
methodology could eliminate a lot of the guesswork
from appropriations and training.
5 CONCLUDING REMARKS
The obtained results have demonstrated that a
methodology based on an ABM and optimization
model is promising. This methodology can optimize
teams of mobile and stationary searchers. The natural
application of Pathfinder would be in assisting
maritime searches. Pathfinder has the potential to
improve the capabilities and functionality of current
methodologies and could also be used for land
searches. Using Pathfinder could advance both SAR
and Anti-Submarine Warfare (ASW) operations.
Even though the described results are related to the
maritime SAR operations, we believe only a few
Optimizing Heterogeneous Maritime Search Teams using an Agent-based Model and Nonlinear Optimization Methods
205

modifications are sufficient for Pathfinder to be
applied to ASW operations and land SAR operations.
For ASW planning, it may be necessary to add
constraints so that the searcher could approach targets
only from a certain direction, for example, from a
blind spot behind submarines where their propellers
are. Such constraints could be implemented.
Combining an ABM and optimization model to
find optimal search plans in a maritime domain has
achieved several goals. The ABM can model target
behavior and its effects on target movement. This is
an improvement over current methods that only
model target movement based on environmental
factors. Then heterogeneous teams of searchers can
be seamlessly optimized. The optimization model
also gives us the flexibility to change penalties and
searcher constraints based on naval aviator and SAR
personal input. Finally, using the proposed
methodology allows us to consider past search plans
(successful and failed) and compare them to optimal
search plans to refine Pathfinder’s models. Thus, we
believe Pathfinder has potential to enhance current
search methodologies.
6 FUTURE RESEARCH
There are several research directions that can refine
and improve the Pathfinder methodology.
To create quality search plans Pathfinder relies on
accurate estimation of the parameters
𝛼𝑠
,𝜏𝑧
,𝑠
,𝑣 and 𝑛𝑠
,𝜏𝑧
,𝑠
,𝑣
since they can influence accuracy of the search.
Currently, there is not enough published data to
derive these values for all target types, searcher types,
terrain types, and visual ranges. In the future, we
would like to gather these data points and then derive
the values of 𝛼 and 𝑛. One way of making the data
collection less expensive is to use Virtual Reality
(VR) to gather the data points. The cost of using VR
to simulate a helicopter searching for a boat is
significantly cheaper than renting a helicopter and
boat to do experiments.
Likewise, more research is needed to collect data
and perform analysis for the ABM. In the current
state, the ABM needed several estimations for
parameters. More research is needed to analyse these
parameters to turn the ABM. In addition, we need
more behavioural data, such as how often people in
boats without power deploy their anchor or how often
a missing kayaker will beach their kayak to conserve
energy. This data needs to be collected and analyzed
to fine tune the ABM. Machine learning techniques
could be used to analyse this data and discover how
targets make decisions.
Another important research question is, how
many agents are sufficient for an accurate target
trajectory description? The answer may depend on
computing resources. In the future, employing
parallel computing methods may change the
dynamics of answering this question. With them, tens
of thousands of agents over a multi-hour search
operation could be modeled in seconds. But even in
that case, Pathfinder’s users or search managers may
need some guidance. This line of research will
continue as Pathfinder develops.
There is room for further improvement and fine-
tuning of the optimization model. This includes
refining the penalty weights and possibly the addition
of more constraints and penalties. Collaboration with
practitioners such as naval aviators and SAR
personnel can help. We hope that such collaboration
has a significant potential to produce search paths that
are easy to implement and navigate.
Finally, we plan to add to Pathfinder's new
searcher and target types that current methodologies
cannot handle. That includes searchers that can
transport and deploy other searchers such as, for
example, USCG cutters that can transport helicopters.
Another possibility is to model active targets that may
change behavior depending on the searcher’s
movement, such as, for example, a submarine being
searched by another submarine.
ACKNOWLEDGEMENTS
The authors would like to acknowledge Institute for
Defense Analyses and the researchers who provided
invaluable knowledge in the field of Search Theory.
We would also like to acknowledge Jack Frost of the
USCG for sharing his expertise in the realm of
maritime SAR.
REFERENCES
Abi-Seid, I., Morin, M., & Nilo, O. (2019). Decision
Support for Planning Maritime Search and Rescue
Operations in Canada. PROCEEDINGS OF THE 21ST
INTERNATIONAL CONFERENCE ON ENTERPRISE
INFORMATION SYSTEMS, 328-339.
Adlerstein, D. (2019, May). Fisherman rescued, clinging to
buoy. Retrieved from Apalachicola Times:
https://www.apalachtimes.com/news/20190525/fisher
man-rescued-clinging-to-buoy
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
206

Ai, B., Li, B., Gao, S., Xu, J., & Shang, H. (2019). An
Intelligent Decision Algorithm for the Generation of
Maritime Search and Rescue Emergency Response
Plans. IEEE, 155835-155850.
AMPL Optimization inc. (2021). MINOS for AMPL.
Retrieved from AMPL:
https://ampl.com/products/solvers/solvers-we-
sell/minos/
Biesecker, C. (2021, March 2). House Panel Wants
Updated Coast Guard Fleet Analysis To Factor In New
Demands. Retrieved from Defense Daily:
www.defensedaily.com/house-panel-wants-updated-
coast-guard-fleet-analysis-factor-new-
demands/congress/
Dabrowski, J. J., & Villiers, J. P. (2015). Maritime piracy
situation modelling with dynamic Bayesian networks.
Information Fusion, 116-130.
Deraeve, J., Anderson, M., & Low, M. (2010). Maritime
counte-piracy study using agent-based simulation. 2012
Spring Simulation Multiconference (SpringSim '10),
(pp. 1-8).
Ding, H., & Castanon, D. (2018). Moving Object Search
with Multiple Agents. Miami FL: IEEE.
Eagle, J. (1984). The Optimal Search for a Moving Target
When the Search Path is Constrained. JSTOR.
El-Hadidy, M., & Alfreedi, A. (2020). Minimizing the
expected search time of finding the hidden object by
maximizing the discount effort reward search.
JOURNAL OF TAIBAH UNIVERSITY FOR SCIENCE,
479-487.
Frost, J., & Stone, L. (2001, September). Review of Search
Theory: Advances and Applications to Search and
Rescue Decision Support. Retrieved from Defense
Technical Information Center:
https://apps.dtic.mil/dtic/tr/fulltext/u2/a397065.pdf
Harris, S., Dixon, D., Dunn D.L., & Romich, A. (2013).
Simulation modeling for maritime port security.
Journal of Defense Modeling and Simulation, 193-201.
Iida, K. (1993). Inverse Nth power detection law for
washburn's lateral range curve. Journal of the
Operations Research Society of Japan , 90-101.
Koopman, B. (1946 (declassified in 1958)). Search and
Screening.
Kratzke, T., Stone, L., & Frost, J. (2010). Search and
Rescue Optimal Planning System. 2010 13th
International Conference on Information Fusion.
Edinburgh, UK .
Lin, L., & Goodrich, M. A. (2010). A Bayesian approach to
modeling lost person behaviors based on terrain
features in Wilderness Search and Rescue.
Computational and Mathematical Organization
Theory, 300-323.
Marchione, E., Johnson, S. D., & Wilson, A. (2014).
Modelling Maritime Piracy: A Spatial Approach.
Journal of Artificial Societies and Social Simulation.
Mohibullah, W., & Julie, S. J. (2013). Developing an Agent
Model of a Missing Person in the Wilderness. 2013
IEEE International Conference on Systems, Man, and
Cybernetics. Manchester, UK: IEEE Xplore.
Motor Lifeboat (MLB). (n.d.). Retrieved from
Textronsystems.com:
https://www.textronsystems.com/products/motor-
lifeboat-mlb
Murtagh, B., & Saunders, M. (1978). Large-scale linearly
constrained optimization. Mathematical Programming,
14: 41–72.
N. C. Edwards, J. T. (1981). Factors Affecting Coast Guard
SAR Unit Visual Detection Performance. Croton, CT
063: USCG R&D Center.
Onggo, B. S., & Karatas, M. (2016). Test-driven simulation
modelling: A case study using agent-based maritime
search-operation simulation. European Journal of
Operational Research, 517-531.
Pike, J. (n.d.). HH-60J Jayhawk Specification. Retrieved
from GlobalSecurity.org.
Przemieniecki, J. S. (2000). Mathematical Methods in
Defense Analysis. In J. S. Przemieniecki, Mathematical
Methods in Defense Analysis (pp. 278-279).
Washington DC: AIAA.
Richardson, H. R., & Discenza, J. (1980). The United States
Coast Guard Computer-Assisted Search Planning
System (CASP). Naval Research Logistics Quarterly,
Vol. 27, 141-157.
Sato, H., & Royset, J. O. (2010). Path Optimization for the
Resource-Constrained Searcher. Navel Research
Logistics , 422-440.
Simon, H. (1982). Models of Bounded Tationality .
Cambridge MA: MIT Press.
Steele, M. J. (2004). Agent-Based Simulation of Unmanned
Surface Vehicles: A Force in the Fleet. Monterey CA:
Naval Postgraduate School.
Stone, L. (2011). In Search of Air France Flight 447.
Informs ORMS-Today.
Stone, L., Royset, J., & Washburn, A. (2016). Optimal
Search for Moving Targets. Springer.
Sullivan, P. J. (2016). Evaluating the Effectiveness of
Waterside Security Alternatives for Force Protection of
Navy Ships and Installations Using X3D Graphics and
Agent-Based Simulation. MONTEREY CA: NAVAL
POSTGRADUATE SCHOOL.
USCG. (2013). USGS Addendum to the US National Search
and Rescue Supplement (NSS). Washington DC:
USCG.
Walton, D., Paulo, E., McCarthy, C., & Vaidyanathn, R.
(2005). Modeling force response to small boat attack
against high value commercial ships. Proceedings of
the Winter Simulation Conference . Orlando FL USA:
IEEE.
Wilensky, U. (1999). Netlogo. Retrieved from
NorthWestern: https://ccl.northwestern.edu/netlogo/
Optimizing Heterogeneous Maritime Search Teams using an Agent-based Model and Nonlinear Optimization Methods
207
