
An Open-source Library for Processing of 3D Data from Indoor Scenes
José María Martínez-Otzeta
1 a
, Iñigo Mendialdua
2 b
, Itsaso Rodríguez-Moreno
1 c
,
Igor Rodriguez
1 d
and Basilio Sierra
1 e
1
Department of Computer Science and Artificial Intelligence, University of the Basque Country (UPV/EHU),
Donostia-San Sebastián, Spain
2
Department of Languages and Computer Systems, University of the Basque Country (UPV/EHU),
Donostia-San Sebastián, Spain
Keywords:
Computer Vision, Pointcloud, 3D Segmentation, Open Source.
Abstract:
In recent years affordable 3D data acquisition devices have appeared in the market. Researchers and developers
have been able to use them in a much larger scale than ever in a wide range of applications, from robotics to
autonomous driving. One of these applications is the processing of 3D indoor scenes, usually in the context of
autonomous navigation of mobile robots, but also in building mapping for map reconstruction or assessment
of the location of structural elements. In this paper we report on the development of an open source Python
package (indoor3d) for processing of 3D data obtained indoors. This package is built on top of the Open3D
package, with the aim of making easier to perform common tasks that arise in indoor data processing. It has
already been helpful in tasks in two different projects: in one of them was useful in the search of structural
elements in a pointcloud obtained by a HoloLens device, and in the other in the location of the handle of a
door for a mobile robot navigation application.
1 INTRODUCTION
During the last years we have been witnesses of a
big explosion in the number of 3D data acquisition
devices around us. Fields like autonomous driving
(Arnold et al., 2019) or industrial robotics (Lin, 2020)
make use of them extensively, but also small-scale
laboratories performing research on computer vision
(Guo et al., 2020) or robotic navigation (Zieli
´
nski
and Markowska-Kaczmar, 2021) can benefit of these
sensors. Due to the widespread possibility of ac-
quiring 3D data, need of processing and interpreting
has also skyrocketed. In the hardware side, special-
ized devices like the Velodyne
1
series are intended
for high-end applications with tight time response
requirements. But other much more affordable de-
vices can also be used when no critical performance
is needed, as is the case of the Intel RealSense line
(Zabatani et al., 2019). Not only data acquisition
a
https://orcid.org/0000-0001-5015-1315
b
https://orcid.org/0000-0003-2519-4094
c
https://orcid.org/0000-0001-8471-9765
d
https://orcid.org/0000-0002-1432-102X
e
https://orcid.org/0000-0001-8062-9332
1
https://velodynelidar.com/
needs to meet high performance standards, data pro-
cessing is also very demanding. It is almost manda-
tory to employ GPU units to train machine learning
models, and sometimes also for inference.
Open source software for efficient 3D data pro-
cessing has been available for a long time. One of the
reference libraries is the Point Cloud Library (PCL)
(Rusu and Cousins, 2011), written in C++. PCL is
a library for processing of n-dimensional pointclouds
and 3D geometry processing. It is free software, dis-
tributed under a BSD license. It is integrated into
ROS (Quigley et al., 2009), the Robot Operating Sys-
tem, widely used in the robotics community. Its data
structures make extensive use of SSE optimizations
available in moderns processors. The implementation
of most mathematical computations relies in Eigen
(Guennebaud et al., 2010), an open source library for
linear algebra. PCL also supports OpenMP
2
and In-
tel TBB library (Reinders, 2007) for parallelization.
Nvidia GPUs are also supported.
More recently, Open3D (Zhou et al., 2018) has
been presented as an alternative, written in Python
and C++ with front-end in both languages. Its aim
is to provide ease of use and and environment where
2
http://openmp.org
610
Martínez-Otzeta, J., Mendialdua, I., Rodríguez-Moreno, I., Rodriguez, I. and Sierra, B.
An Open-source Library for Processing of 3D Data from Indoor Scenes.
DOI: 10.5220/0010870100003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 610-615
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Pointcloud in the LANTEGI4.0 project.
rapid prototyping is possible, in addition to the de-
velopment of full-fledged applications. The Open3D
backend is implemented in C++11 and set up for
OpenMP parallelization. It is open source and re-
leased under the MIT license. It is possible to work
with pointclouds, meshes or RGB-D images, and in-
put/output algorithms, sampling, data conversion and
visualization is available for each of them. Other al-
gorithms such as ICP registration, normal estimation,
ICP registration (Besl and McKay, 1992), and vol-
umetric integration (Curless and Levoy, 1996) have
also been implemented.
In this paper we present an open source package
written on top of Open3D and focused in the tasks
that are usually found when working with indoors 3D
data. We also present the application of the functions
of this package in two different projects. The first one
is LANTEGI4.0, a project in which one of the tasks
was to find structural elements in a pointcloud repre-
senting a big section of a building; the second one is
BotaRobota, a project in which one of the tasks was
to locate the position and orientation of a door handle.
The paper is organized as follows: after the intro-
duction, a section called Library Structure gives an
outline of the arrangement of the library functions in
different modules; then two Usage Cases are shown,
demonstrating the usefulness of the library in two dif-
ferent projects; the paper concludes with a Conclu-
sion section followed by the bibliography.
2 PACKAGE STRUCTURE
The package indoor3d is built on top of Open3D.
Open3D provides data structures for three kinds of
representations: pointclouds, meshes, and RGB-D
images. In our package we will only deal with point-
clouds. The contribution over Open3D is the integra-
tion of implicit knowledge about the room geometry.
For example, Open3D finds planes in the pointcloud
using RANSAC (Fischler and Bolles, 1981), and our
package finds sets of mutually parallel or perpendic-
ular planes from their results. Likewise, Open3D
provides clustering functions, and our package tells
whether the clusters are close to the limits of the room
(ceiling, floor and walls) or not.
The package is structured in five different mod-
ules:
• vector
• plane
• pointcloud
• findroom
• clusteringroom
The modules vector and plane define functions
that perform geometric operations on vectors and
planes, respectively. In the pointcloud module there
are functions that take pointclouds as parameters or
that return pointclouds. The module findroom is the
place for code that is useful when looking for rooms
in a pointcloud of a building. And clustering and seg-
mentation utilities belong to the clusteringroom mod-
ule.
The functions in the modules are commented with
Python docstrings in such a way that it is possible
to generate automatically documentation in HTML or
PDF format using Sphinx
3
.
The main idea is that indoor applications which
make use of pointclouds may share some common
3
https://www.sphinx-doc.org/
An Open-source Library for Processing of 3D Data from Indoor Scenes
611

(a) Original pointcloud. (b) Pointcloud with its pseudo-negative in green.
Figure 2: Example of the pseudo-negative of a pointcloud.
tasks. For example, it is usual to try to locate a door, a
wall, the floor, or estimate the distance from some ob-
ject to the wall. These tasks usually imply to be able
to find planes, compute angles and distances, check
if floor and ceiling are parallel to each other, find the
point of intersection of two walls, etc. This package is
intended to help the researcher or developer with the
more menial tasks.
Vector Module. In this module, functions that work
with vectors are defined. For example, it is possible to
convert any iterable into a Python numpy array, which
is the default representation of vectors in this module.
There are functions to get the unit vector of an arbi-
trary vector, to compute the angle between vectors or
to find the point that is located at some distance of a
given point in a given direction.
Plane Module. The functions that deal with planes
are defined here. A specialized plane class is con-
structed from the four parameters of the plane equa-
tion Ax + By + Cz + D = 0. The objects of this class
can return the normal of the plane.
In this module we find utilities to compute the an-
gle between planes, between the plane and the axes,
between the plane and the plane perpendicular to one
of the canonical axes, to check if two planes are per-
pendicular or parallel up to some given tolerance, the
point that lies in the intersection of three planes, dis-
tances between planes and points, etc.
Pointcloud Module. This module contains the
functions that compute distances between points and
planes to pointclouds, as well as those which check if
a point is inside the convex hull of a pointcloud. It is
also possible to partition a pointcloud in three subsets
according to a plane: those closer to the plane than
a given tolerance, those at one side of the plane and
those the another side. This is useful when a plane
that we presume is a door has been detected, and we
want to know which points are in the door, which in
front of the door and which behind the door. The same
procedure, but with five subsets, can be applied tak-
ing a pointcloud and two parallel planes. This is use-
ful, for example, for segmenting the points in a room
according to the planes defining the ceiling and the
floor. An example of the kind of pointcloud expected
is shown in Figure 1.
It is also possible to subtract a pointcloud from an-
other pointcloud. In this case, if pointcloud B is sub-
tracted from pointcloud A, all the points in pointcloud
A that are closer to pointcloud B than some threshold
are removed. It is also possible to subtract a convex
hull from a pointcloud. If a point is inside (could be
parameterized to be outside instead) the convex hull,
it is removed.
There are also functions for performing a uniform
3D sampling inside a convex hull by rejection sam-
pling. This allows the definition of another func-
tion that finds the pseudo-negative of a pointcloud.
Given a pointcloud A, first its convex hull is com-
puted. Then, another pointcloud B is created from
a uniform random sampling in the convex hull. And
finally, pointcloud A is subtracted from pointcloud B.
With this procedure it is possible to find door frames,
as shown in Figure 2.
Findroom Module. This module is in charge of
finding structural elements that could belong to a
room. For example, it is possible to find a collection
of N planes in the pointcloud, where N is given by the
user, and search for sets of six planes that might de-
limit a room. The procedure looks for three pairs of
parallel planes that are perpendicular between them.
These planes would be the pairs (ceiling - floor, wall
left - wall right, wall front - wall -rear), all of them
composed by two parallel planes. The condition of
parallelism is also possible to be relaxed by some tol-
erance, to account for noise in the data. If it is known
that some axis of the frame of reference of the point-
cloud is congruent with the vertical orientation in the
real world, this information can be given to the func-
tion to improve the search for planes.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
612
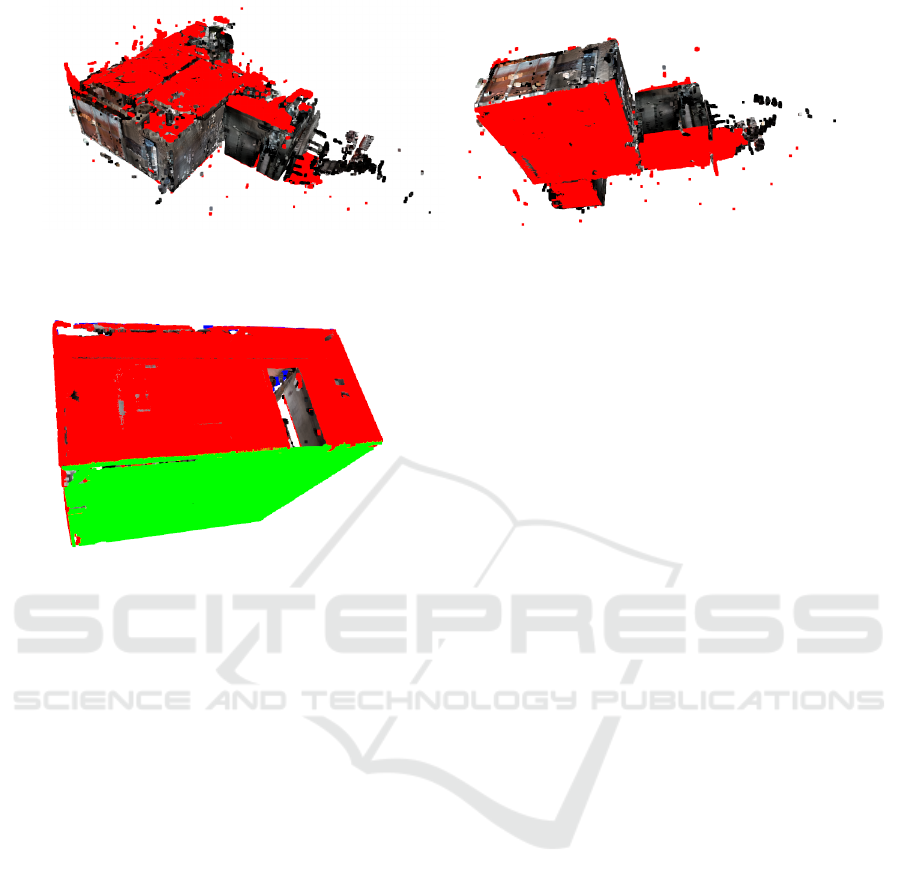
(a) Detection of ceiling and beyond. (b) Detection of floor and beyond.
Figure 3: Example of the pseudo-negative of a pointcloud.
Figure 4: Room found by the pointcloud processing proce-
dure.
There are also functions for computing the eight
points that delimit the vertices of the room, and for
extracting the points that are inside and outside the
room, or very close to the boundaries.
Clusteringroom Module. In this module there are
functions meant to be used after a room has been de-
tected and the planes of floor, ceiling and walls have
been computed. There are clustering functions that
take into account the distance to the ceiling, floor and
walls and mark some clusters as door or lamp candi-
dates. It is also possible to get a graphical depiction
of the clusters.
3 USAGE CASES
The development of this package started during the
LANTEGI4.0 project, funded by the Basque Govern-
ment, and where the goal is to make advances in the
development of a system that would be able to create a
3D model of the true state of the building of a factory
from the construction planes and the data collected by
an autonomous robotic system.
One of the tasks was to detect structural elements
from data collected by a sensor. These data repre-
sented a significant part of the building, bigger than
a single room. In Figure 1 the input pointcloud is
shown. The results after applying the ceiling and floor
detection are shown in Figure 3.
After finding all the planes that delimit the room,
they can be extracted as shown in Figure 4. The walls
are painted in red, the ceiling in blue and the floor in
green.
The clustering functions take into account infor-
mation about the planes that delimit the room, and
this is used to detect clusters that are not likely to be
structural elements because are too far away from the
walls and the ceiling. In Figure 5 can be seen the de-
tected clusters, while in Figure 6 the clusters which
are unlikely to be structural elements are shown.
The package developed for the LANTEGI4.0
project has been also used in another project called
BotaRobota. BotaRobota is a project funded by the
Basque Government with the aim of developing a
cleaning robot able to detect and open doors without
human intervention. One of the tasks was to detect
the door handle in a pointcloud so the robot could
be able to open the door. To detect the door handle
the first step was to detect the door using the standard
plane search procedure, and then the functions of seg-
menting the pointcloud with respect to a plane, and
the functions for computing distances between planes
and pointclouds were useful to locate the handle. For
the orientation of the handle, other functions that find
planes parallel to another to some distance were use-
ful in order to make it easier to find a minimal bound-
ing box parallel to the door. In Figure 7 can be seen
the results of this procedure. In short, the functions
developed in the LANTEGI4.0 project were useful in
making easier to tackle the BotaRobota project and
we want to make this code available for anyone who
could find it useful.
An Open-source Library for Processing of 3D Data from Indoor Scenes
613

(a) Set of clusters detected inside a room. (b) Set of clusters painted in different colors.
Figure 5: Clustering of a room.
(a) Detected clusters. (b) Location of the clusters in the room.
Figure 6: Clusters labeled as unlikely to be structural elements.
Figure 7: Door handle position and orientation.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
614

4 CONCLUSION
In this paper we have presented a 3D data processing
library focused on indoor scenes. We have described
its main functionalities and showed its application on
two real projects. As further work, we plan to im-
prove the documentation and refactor and clean the
code, with the aim of uploading the library to the PyPI
repository, the reference place for Python packages.
In the meantime, the code is available in GitHub
4
.
ACKNOWLEDGEMENTS
This work has been partially funded by the Basque
Government, Spain, grant number IT900-16, ELKA-
RTEK project (LANTEGI4.0 KK-2020/00072)
and Euskampus Resilience Covid19 (BotaRob-
ota EUSK20/04), and the Spanish Ministry of
Science (MCIU), the State Research Agency
(AEI), the European Regional Development Fund
(FEDER), grant number RTI2018-093337-B-I00
(MCIU/AEI/FEDER, UE) and the Spanish Min-
istry of Science, Innovation and Universities
(FPU18/04737 predoctoral grant). We gratefully
acknowledge the support of NVIDIA Corporation
with the donation of the Titan Xp GPU used for this
research.
REFERENCES
Arnold, E., Al-Jarrah, O. Y., Dianati, M., Fallah, S., Ox-
toby, D., and Mouzakitis, A. (2019). A survey on
3d object detection methods for autonomous driving
applications. IEEE Transactions on Intelligent Trans-
portation Systems, 20(10):3782–3795.
Besl, P. J. and McKay, N. D. (1992). Method for registration
of 3-d shapes. In Sensor fusion IV: control paradigms
and data structures, volume 1611, pages 586–606. In-
ternational Society for Optics and Photonics.
Curless, B. and Levoy, M. (1996). A volumetric method for
building complex models from range images. In Pro-
ceedings of the 23rd annual conference on Computer
graphics and interactive techniques, pages 303–312.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Guennebaud, G., Jacob, B., et al. (2010). Eigen. URl:
http://eigen. tuxfamily. org, 3.
Guo, Y., Wang, H., Hu, Q., Liu, H., Liu, L., and Ben-
namoun, M. (2020). Deep learning for 3D point
4
https://github.com/rsait/indoor3d
clouds: A survey. IEEE transactions on pattern anal-
ysis and machine intelligence.
Lin, H. (2020). Robotic manipulation based on 3D vi-
sion: A survey. In Proceedings of the 2020 Interna-
tional Conference on Pattern Recognition and Intelli-
gent Systems, pages 1–5.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A. Y., et al. (2009). ROS:
an open-source Robot Operating System. In ICRA
workshop on open source software, volume 3, page 5.
Kobe, Japan.
Reinders, J. (2007). Intel threading building blocks: out-
fitting C++ for multi-core processor parallelism. "
O’Reilly Media, Inc.".
Rusu, R. B. and Cousins, S. (2011). 3D is here: Point Cloud
Library (PCL). In IEEE International Conference on
Robotics and Automation (ICRA), Shanghai, China.
Zabatani, A., Surazhsky, V., Sperling, E., Moshe, S. B.,
Menashe, O., Silver, D. H., Karni, Z., Bronstein,
A. M., Bronstein, M. M., and Kimmel, R. (2019). In-
tel® RealSense™ SR300 Coded Light Depth Camera.
IEEE transactions on pattern analysis and machine
intelligence, 42(10):2333–2345.
Zhou, Q.-Y., Park, J., and Koltun, V. (2018). Open3D:
A modern library for 3D data processing.
arXiv:1801.09847.
Zieli
´
nski, P. and Markowska-Kaczmar, U. (2021). 3D
robotic navigation using a vision-based deep rein-
forcement learning model. Applied Soft Computing,
page 107602.
An Open-source Library for Processing of 3D Data from Indoor Scenes
615
