
Towards a Certification of Deep Image Classifiers against Convolutional
Attacks
Mallek Mziou-Sallami
1,3
and Faouzi Adjed
1,2
1
IRT SystemX, Palaiseau, France
2
Expleo Group, Montigny-le-Bretonneux, France
3
CEA, Evry, France
Keywords:
NN Robustness, Uncertainty in AI, Perception, Abstract Interpretation.
Abstract:
Deep learning models do not achieve sufficient confidence, explainability and transparency levels to be inte-
grated into safety-critical systems. In the context of DNN-based image classifier, robustness have been first
studied under simple image attacks (2D rotation, brightness), and then, subsequently, under other geometrical
perturbations. In this paper, we intend to introduce a new method to certify deep image classifiers against
convolutional attacks. Using the abstract interpretation theory, we formulate the lower and upper bounds with
abstract intervals to support other classes of advanced attacks including image filtering. We experiment the
proposed method on MNIST and CIFAR10 databases and several DNN architectures. The obtained results
show that convolutional neural networks are more robust against filtering attacks. Multilayered perceptron
robustness decreases when increasing number of neurons and hidden layers. These results prove that the
complexity of DNN models improves prediction’s accuracy but often impacts robustness.
1 INTRODUCTION
Experiments showed that DNNs are overly sensitive
to small disturbances in their input data. It is well
known that one can generate adversarial examples by
applying geometrical transformation (Biggio et al.,
2013; Szegedy et al., 2013). In the other hand, to em-
bed DNN-based algorithm into safety-critical systems
such as aircraft systems or autonomous vehicles, ro-
bustness proof remains essential. Moreover, the non-
transparency nature of DNNs makes robustness ver-
ification a major challenge facing the many different
possibilities of disturbances. For example, to evalu-
ate the lightness effects, we have to verify whether if
a NN-based image classifier is robust against bright-
ness shift or not. In other words, whether the classi-
fication results are invariant under affine variation of
pixels intensity or not. This assumption hugely sim-
plifies the reality. If we use an hypothesis closer to
the reality, a more complicated modeling have to be
considered, such as, the case where, views taken are
linked by perspective transformations in the presence
of thick fog inducing a blur on the images. The ques-
tion to be addressed therefore is how to guarantee the
robustness of DNN model? To overcome this chal-
lenge and come up with a solution, many DNN ro-
bustness verification frameworks have been proposed
such as DeepSymbol (Li et al., 2019), ERAN (Singh
et al., 2018), DeepG (Balunovic et al., 2019), Relu-
plex (Katz et al., 2017), PLANET (Bunel et al., 2018)
and PRODeep (Li et al., 2020). The common idea
behind all these verification tools is the prediction of
disturbed input model using an approximate neural
network behavior. In another approach, researchers
focus on robustness study during the design phase to
build more accurate models against such transforma-
tions (Xiao et al., 2018; Jaderberg et al., 2015).
It should be noted that robustness verification is a
different approach from the empirical evaluation of
neural networks. Table [1] summarize some research
in the two approaches classified according to image’s
attacks. Despite the multitude of methods dealing
empirically with the evaluation of neural networks
(Xiao et al., 2018; Engstrom et al., 2019; Kanbak
et al., 2018; Goodfellow et al., 2009; Fawzi et al.,
2017; Alaifari et al., 2018), robustness certification
still a remaining challenge. In this context, formal
methods are widely applied to assess the local and
global robustness of deep neural networks. Typically,
static analysis with abstract interpretation or SAT
solvers approaches are applied to neural networks
and leverages the important progress of formal
Mziou-Sallami, M. and Adjed, F.
Towards a Certification of Deep Image Classifiers against Convolutional Attacks.
DOI: 10.5220/0010870400003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 2, pages 419-428
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
419

Table 1: Summary of research work related to DNNs verification against image’s attacks or deformations.
DNNs Certification DNNs Evaluation
DeepG DeepPoly (Xiao et al., 2018)
Attacks References Attacks References (Engstrom et al., 2019)
Translation (Balunovic et al., 2019) Brightness,L
∞
(Singh et al., 2018; Gehr et al., 2018; Singh et al., 2019b; Singh et al., 2019a) (Kanbak et al., 2018)
Rotation 2D (Balunovic et al., 2019) FGSM (Singh et al., 2018; Gehr et al., 2018; Singh et al., 2019b; Singh et al., 2019a) (Goodfellow et al., 2009)
Scaling (Balunovic et al., 2019) Rotation 2D (Singh et al., 2019a) (Fawzi et al., 2017)
Sheering (Balunovic et al., 2019) Rotation 3D (Sallami et al., 2019) (Alaifari et al., 2018)
Vector Fields (Ruoss et al., 2020) Convolution (Sallami et al., 2019)
methods over the last decades. Such approaches
estimate bounds on the perturbation of the inputs
and formally guarantee the same DNN prediction
within these bounds. However, formal methods
over DNN for image perception system have often
been applied to simple image attacks. Existing
robustness verification tools often consider norm
based robustness or brightness robustness. For
example, authors, in (Singh et al., 2018; Gehr et al.,
2018; Singh et al., 2019b), have introduced a neural
network certification method based on the abstract
interpretation. Experimental results on MNIST and
CIFAR databases have proven the capability of a
such system to certify the robustness against attacks
including simple contrast, FGSM (Fast Gradient
Signed Method) noise and L
∞
attacks. Other works
have explored certification against geometric trans-
formation such as 2D rotation (Singh et al., 2019a),
scaling (Balunovic et al., 2019) and 3D rotations
(Sallami et al., 2019). This paper is the continuity
of the earlier work proposed in (Sallami et al.,
2019). We focus on formal methods for NN-based
object recognition systems and we introduce a new
method to assess the robustness of a given NN-based
image classifier under convolutional attacks. We
propose a new algorithm to compute lower and upper
bounds abstract elements that allow us to verify the
robustness of a DNN against filtering attacks. To
the best of our knowledge, the proposed method is
currently the state-of-the-art system for certifying
robustness of neural networks under filtering and
convolutional attacks. Fig.1 illustrates this fact by
briefly describing the proposed system.
Figure 1: End-to-end DNN robustness verification against
filtering.
The following article is organized as follows: In
section 2, a brief review of verification approaches is
given with a focus on the abstract interpretation the-
ory and its distinctive contribution to neural network
verification. We present in Section 3 the system de-
signed to certify filtering robustness. Our experimen-
tal settings and results will be given respectively in
section 4 and 5. Finally, in Section 6, we present our
conclusions and we discuss some future perspectives.
2 BACKGROUND AND RELATED
WORKS
Several techniques allowing the verification of neural
networks are developed in the literature. The abstract
interpretation, which is one among these techniques
will be presented in more details in the next sections.
We will recall the formulation of the lower bound and
upper bound for both contrast and geometric attacks.
2.1 Abstract Interpretations for Neural
Network Certification
Abstract interpretation is an approach to infer seman-
tic properties from computer programs and to demon-
strate their soundness (Cousot and Cousot, 1992).
Static analysis by abstract interpretation allows to au-
tomatically extract information about all possible ex-
ecution states of a computer program. It is used
for automatic debugging, compilers optimizing, code
execution and the certification of programs against
some classes of bugs. One of the first application
of static analysis with abstract interpretation for neu-
ral networks is implemented by Pulina and Tacchella
(Pulina and Tacchella, 2010) in 2010. However, their
work was focused on shallow NN (MLP).
Recently, several scientific contributions adapted
this method for verifying the robustness property of
larger neural networks by proposing abstract trans-
formers
1
for each type of activation function (Singh
et al., 2018; Gehr et al., 2018; Singh et al., 2019b;
Singh et al., 2019a). In what follows, we recall in a
synthetic way some concepts.
Let
¯
X be a given input.
¯
X may undergo a deforma-
tion or even an attack. In such a case, ¯x ∈
¯
X will be
1
Abstract transformer is a step of abstract interpretation
construction which is a abstract set that includes all concrete
outputs corresponding to the real data
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
420

transformed into ¯x
ε
. The original inputs perturbed by
ε are denoted by R
¯
X,ε
. Verifying the robustness prop-
erty for R
¯
X,ε
consists of checking the property over
the whole possible perturbation of
¯
X.
Let C
L
be the output sets with the same label L. We
denote
¯
Y as the set of each prediction for each element
in R
¯
X,ε
.
C
L
= { ¯y ∈
¯
Y |argmax ¯y
i
= L} (1)
The (R
¯
X,ε
,C
L
) robustness property is verified only if
the outputs O
R
of R
¯
X,ε
are included in C
L
. However,
in reality, we are not able to control the behavior of
hidden layers. Accordingly, we have no knowledge
about O
R
. The abstract interpretation is an alterna-
tive to face this defect. In fact, it allows to determine
an abstract domain thought transformers and verifies
the inclusion condition in new abstract domains α
R
,
which is an abstraction of
¯
X. We denote the output ab-
stract domain α
O
R
. The (R
¯
X,ε
,C
L
) property is checked:
• If the outputs O
R
of R
¯
X,ε
are included in C
L
.
• If the outputs α
O
R
of the abstraction of R
¯
X,ε
(α
R
)
are included in C
L
.
It seems necessary to define abstract transformers that
are precise for the different existing activation func-
tions. However, the sacalability is one of the major
shortcoming in the implementation of this approach.
Therefore, Singh et al. (Singh et al., 2018) proposed
an alternative solution, called DeepZ analyzer, to deal
with the scalability problem. DeepZ allows also to
certify the robustness of neural network. Another
analyzer, called DeepPoly, have been introduced by
Gerhr et al. (Gehr et al., 2018). This approach re-
lies on a novel abstract domain that merge polyhe-
dron with floating point and intervals. The approach
is denoted AI
2
(Gehr et al., 2018). This analyzer may
automatically prove the robustness of different neural
networks architectures, including convolutional neu-
ral networks. The test results demonstrate that AI
2
an-
alyzer is fully accurate and may be used to certify the
most recent defense efficiency for neural networks.
It is characterized by its high precision arithmetic in
floating point and it manages several activation func-
tions, including ReLU (REctified Linear Unit),TanH,
and Sigmoid. It is worth mentioning that DeepZ is
based on the abstract domains and more particularly
the zonotopes (Ghorbal et al., 2009). DeepPoly anal-
yser supports refine transformation as well as modern
activation functions such as ReLU, sigmoid, TanH
and maxpool. According to authors, DeepPoly is the
most precise analyser compared to AI
2
and DeepZ
and manage also deep convolutional neural networks.
This method has been used to check complex pertur-
bation, including 2D rotation.
2.2 Lower and Upper Bound for
Contrast and Geometrical Attacks
In the abstract interpretation for computer science
(Henry, 2014), lower bound and upper bound are de-
fined as longest execution time case. Similarly, for
AI
2
, the lower and upper bounds are the limits of ac-
cepted disturbance. In the case of luminosity distur-
bance, the lower bound (LB) and the upper bound
(UB) are respectively the minimum and maximum
brightness values. We can approximate it to a bright-
ness shift. Indeed, these two values allow us to define
the abstract intervals that we need. In the case of plane
rotation, the contribution of the neighboring pixels to
the intensity of the disturbed pixel is proportional to
its distance from the initial pixel. This approximation
lets us estimate the possible LB and UB, which give
us the polytopes in which each rotated pixel is going
to end. Combined with abstract intervals, they allow
us to compute the needed abstract domain. It is rec-
ommended to add a tracing algorithm which split the
rotation interval into sub-intervals. Such procedure
validate whether the neural network is able to recog-
nize the object when it changes orientation in the im-
age.
3 PROPOSED METHOD
Image attacks have been extensively studied over the
last few years for solving real world problems in sev-
eral areas. Different attacks were explored on images
and videos as summarized by Vassaux et al. (Vassaux
et al., 2002). We recall here the three following cate-
gories of image attacks:
• Common Signal Processing: It is necessary that
the neural network recognize the object despite
common signal processing operations being ap-
plied to the input image. Among these opera-
tions, we name few: filtering, re-sampling, re-
quantization, compression, color contrast and en-
hancement.
• Occlusion Attack: is defined by masking some
parts of the images like cropping.
• Common Geometric Distortions: which are ge-
ometric deformation of the image, such as rota-
tion, translation and scaling.
We focus our exploration on the first category, specifi-
cally on convolutional (filtering) attacks. With regard
to the geometric image distortions, the basic ones in-
clude rotation, uniform scale change, reflection and
shearing are studied in Sallami et al. (Sallami et al.,
Towards a Certification of Deep Image Classifiers against Convolutional Attacks
421

2019), and by Balunovic et al. (Balunovic et al.,
2019) by proposing different and more precise ab-
stract domains for NN geometrical certification.
The particularity of this work is to avoid the speci-
ficity of the disturbance. As a matter of fact, the
proposed method allows the evaluation of the model
depending on the internal structural data and not by
adding an ε-perturbation. The filtering attack depends
on the structural variability of the neighborhood of
each pixel encompassing all disturbances. Using the
convolution filter with different kernel size, the pro-
posed method may certify all the possible values of
the filter as illustrated in figure 2.
3.1 Filtering Attack
Filtering is a practice for enhancing images. Mathe-
matically, the filtering is the result of the convolution
of a function (image) with a kernel. Suppose that we
have a filter H with d × d size applied to the image I.
For every pixel in the filtered image I
0
will have the
following value:
I
0
(i, j) = ( f ∗h)(i, j) =
n=
d−1
2
∑
n=−
d−1
2
m=
d−1
2
∑
m=−
d−1
2
f (i−n, j−m)h(n, m)
(2)
In image processing field, the resulting image de-
pends on the choice of the kernel. In fact, it can be
used for blurring, enhancement, smoothing and fil-
tering, etc. For example, the Gaussian filter is used
for noising and denoising depending on the variance
of the kernel. In other words, the Gaussian distribu-
tion is approximated by a convolution kernel to build
a convolution matrix (Gedraite and Hadad, 2011). In
the real world case, the noise is applied randomly like
a fog or snow. Therefore, when the image is captured,
some pixels will be masked. Consequently, the recog-
nition of an object in the image depends strongly on
the size of the mask applied. With the convolution,
locally (pixel by pixel), we can fit the weights of the
kernel to reproduce the same noise. However, it will
not be possible to create a kernel for each pixel, there-
fore we suggest to build an interval for every pixel
and to verify it formally by abstract interpretation ap-
proach. It can be seen as a 3D image with variable
voxels.
3.2 Lower and Upper Bound for
Convolutional Attacks
Our approach consists in defining a lower bound (LB)
and an upper bound (UB) independently from the ap-
plied filter coefficients. The pixel on the filtered im-
age is estimated according to the size of the filter. The
LB and the UB of each pixel are computed using the
pixel’s neighborhood. Indeed, the value of pixel af-
ter the convolution will have the minimum value of
its neighborhood for the LB and the maximum for the
UB. i.e,
UB
I(i, j)
=
n=
d−1
2
∑
n=−
d−1
2
m=
d−1
2
∑
m=−
d−1
2
f (i−n, j−m)
maxN (f (i, j))
(3)
LB
I(i, j)
=
n=
d−1
2
∑
n=−
d−1
2
m=
d−1
2
∑
m=−
d−1
2
f (i−n, j−m)
minN (f (i, j))
(4)
where N ( f (i, j)) defines the neighborhood of the
pixel (i, j), f defines the original image and h is the
filter. The figure 2 illustrates an example of a se-
lection of the upper and the lower bounds. It il-
lustrates also the indicative minimum neighborhood
(
minN ( f (i, j))
) and the indicative maximum neighbor-
hood (
maxN ( f (i, j))
) by respectively the convolution
kernels up and down. The final LB and UB corre-
spond respectively to the min and the max values be-
tween the LB and the UB images related to the mini-
mum and the maximum filter size. Algorithms 1 and
2 describe in more details the different steps, where
p
h
and p
v
are the horizontal and vertical position of
the pixel in the image, w and h are the filters and dim
defines its size. In algorithm 1, depending on the fil-
ter size, we extract for each pixel its neighborhood,
whereas algorithm 2 computes the lower and upper
bounds of the selected neighborhood.
4 EXPERIMENTAL SETTINGS
AND RESULTS
This section is dedicated to highlight our experimen-
tal settings and results for evaluating the effectiveness
of our approach used to verify the robustness proper-
ties against the convolution attacks.
4.1 Experimentation Settings
Herein, we point out the two main settings that allow
us to carry out our experiment. The first one is the
used datasets and the second one is the a set of the
neural networks, to evaluate, pre-trained on the two
datasets. The details of the implementation are pre-
sented in the subsection 4.2.
4.1.1 Datasets
Well known datasets, MNIST and CIFAR, are used to
evaluate the impact of filter’s size on the robustness of
the selected neural networks models.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
422
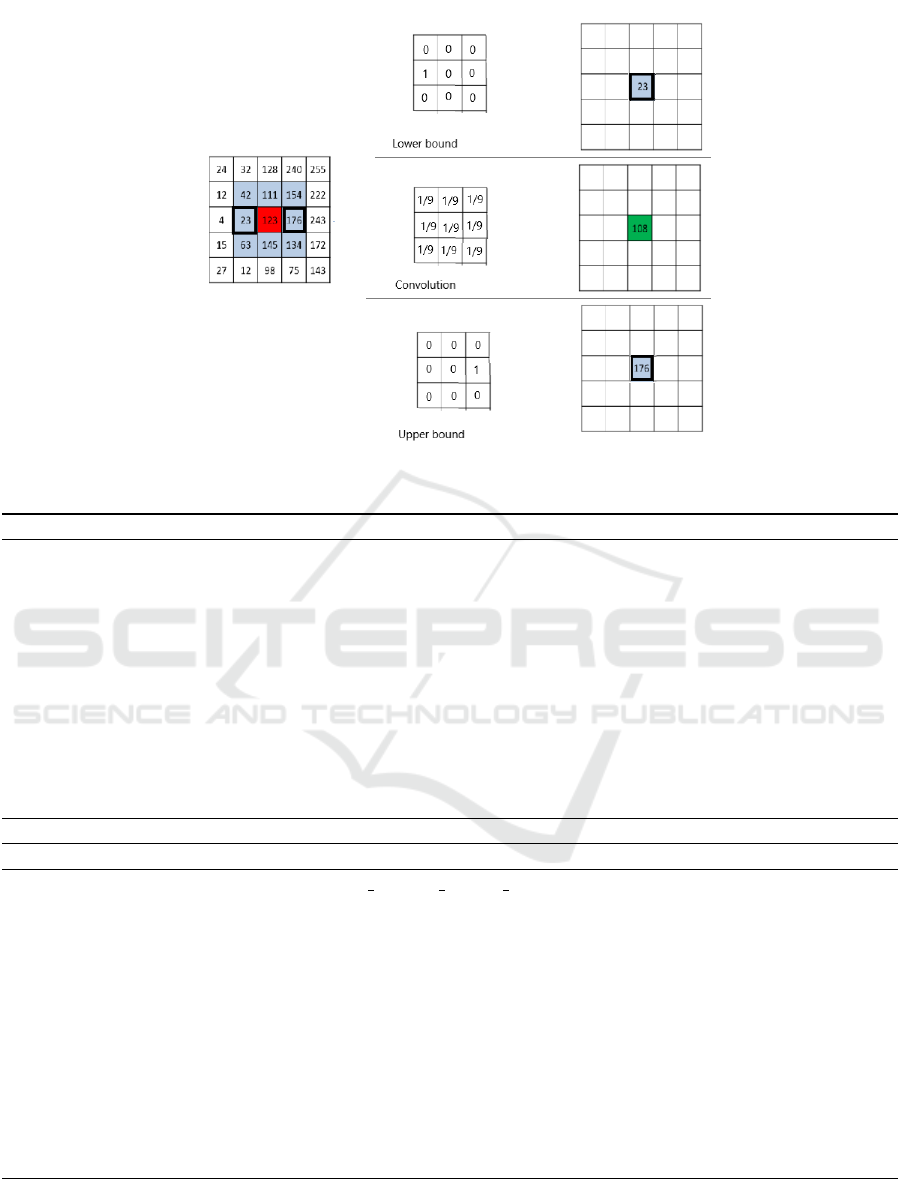
Figure 2: Lower and upper bound for convolution. The first line convolution illustrates the lower bound kernel, the second
line convolution represents an example of convolution (Box blur), whereas the third line illustrates the upper bound kernel.
Algorithm 1: Neighbors.
1: procedure PROCEDURE NEIGHBORS
Require:Image ∈ [0, 255]
m×n
, dim ∈ [1, N]
Require:p
h
∈ [1, m], p
v
∈ [1, n]
2: Neighbors ← []
3: for t
1
∈ {−dim, . . . , dim}; t
2
∈ {−dim, . . . , dim} do
4: if
(0 < p
h
−t
1
< m) & (0 < p
v
−t
2
< n)
then
5: Neighbors ← Neighbors ∪ Image
p
h
−t
1
:p
h
+t
1
; p
v
−t
2
: p
v
+t
2
6: end if
7: end for
8: Return Neighbors
9: end procedure
Algorithm 2: Lower and Upper Bound for convolution.
1: procedure PROCEDURE CONVOLUTION LOWER UPPER BOUND
Input: I ∈ [0, 255]
m×n
;h, w ∈ J1, T K, T size of the filter
2: I
LB
, I
UB
← I
3: for p
h
∈ {1, . . . , m}; p
v
∈ {1, . . . , n} do
4: L
1
[p
h
, p
v
] ← min(Neighbors(I, h, p
h
, p
v
))
5: U
1
[p
h
, p
v
] ← max(Neighbors(I, h, p
h
, p
v
))
6: L
2
[p
h
, p
v
] ← min(Neighbors(I, w, p
h
, p
v
))
7: U
2
[p
h
, p
v
] ← max(Neighbors(I, w, p
h
, p
v
))
8: I
LB
[p
h
, p
v
] ← min(L
1
[p
h
, p
v
], L
2
[p
h
, p
v
])
9: I
UB
[p
h
, p
v
] ← max(U
1
[p
h
, p
v
],U
2
[p
h
, p
v
])
10: end for
11: Return I
LB
, I
UB
12: end procedure
Towards a Certification of Deep Image Classifiers against Convolutional Attacks
423
1. MNIST Dataset (LeCun, 1998; LeCun et al.,
1998) contains grayscale images of size 28 × 28
pixels. It consists of a handwritten digits size nor-
malized and centred in fixed-size image where 50
images are selected for the evaluation.
2. CIFAR 10 dataset (Krizhevsky et al., 2009) con-
tains a color images of size 32 ×32 pixels. It con-
tains 10 different and exclusive classes where 100
images are selected for the evaluation.
The robustness criterion of the evaluation is the frac-
tion between the number of verified images (V I) un-
der the attack and the total number of well classified
ones (WCI). Then, the robustness metric R
ess
is set
to:
R
ess
=
#V I
#WCI
(5)
The equation 5 values vary between 0 and 1. The
more the results of the equation is closer to 1, the
more the combination, neural network model and fil-
ter size is robust. The use of abstract interpretation
(see section 2.1) certify formally the robustness of the
given combination.
4.1.2 Evaluated Neural Networks
Four fully connected neural network models with 3, 6
and 9 layers and one convolutional are selected for the
MNIST dataset. Whereas, for CIFAR-10, four mod-
els are used: three of them are fully connected layers
with 4, 6 and 9 layers respectively and a last one con-
volutional with 3 layers. Table 2 resumes the charac-
teristic of the evaluated models giving more details,
such as the activation function used and the number
parameters estimated (#units).
4.2 Implementation
The abstract domain for convolutional attacks is im-
plemented in Python. As abstract interpretation ana-
lyzer, DeepPoly solution (see section 2.1) has been
used. This latter is based on two main libraries
2
ERAN and ELINA, coded in respectively Python and
C programming languages. The pre-trained models
presented in table 2 are implemented, where fully
connected layers and convolutional models are eval-
uated using MNIST and CIFAR10 datasets. The size
of the filters varies from 2 × 2 to 18 × 18 which is
equivalent to dim ∈ {1, 2, . . . , 9} in algorithm 1.
2
All needed libraries for the implementation are given
in the following Github https://github.com/eth-sri/eran
5 RESULTS
To investigate the efficacity and scalability of our cer-
tification method, we evaluate it on a different size
of filters. The effect of the convolution attack, based
on the size of the filter, is illustrated in the examples
given in figures 5 and 7 for MNIST dataset and fig-
ures 6 and 8 for CIFAR10 dataset. For MNIST ex-
amples, it is obviously visible that the lower bound
attack reduces the white (clear) pixels and replace it
with dark ones, and the upper bound attack increases
the white pixels. These examples highlight the effect
of the borders and object structure in the classifica-
tion. The CIFAR10 examples highlights this effect on
the RGB images making darker and clearer the image
for respectively lower and upper bounds. In RGB im-
ages, the convolution attack shows also a blurring of
the object. From the examples given in figures 7 and
8, where the size of the convolution kernel is larger,
the attacks damages further the object in the image
compared to figures 5 and 6.
The lower and upper bounds are also highlighted
attacking only one channel of the RGB images given
in CIFAR10. Figure 9 illustrates respectively the at-
tack of red, green and blue channels. The lower bound
reduces the effect of the channel and the upper one in-
creases it. This attack could simulate the failure of the
channel sensors of a camera.
As described in earlier sections, we applied our
proposed method to prove a neural network robust-
ness against filtering attacks. Specifically, our anal-
ysis can prove that the MNIST network can classify
a given image of a digit correctly even if every pixel
intensity is an aggregation of its neighbors intensity.
Filtering according to x and y generate a blurry ap-
pearance on the image. So, to test the robustness of
the neural network, just consider a two dimensional
filter with a size between dim
1
and dim
2
. Figure 3
(resp 4) show an example of robustness function for
dim
1
∈ [0, 9], dim
2
∈ [0, 9] on MNIST dataset (resp
CIFAR dataset). The results of MNIST robustness,
using the equation 5, are given in the figures 3. The
results show the square filter i.e 1 in the x-axis is
equivalent to the filter 3 × 3, in other words dim1 = 1
and dim2 = 1. The y-axis graphs represents the ro-
bustness metric. For example, in figure 3 the robust-
ness of convMaxPool model is equal to 30% when
MNIST images are filtered with a filter 3 × 3 (x-axis
= 1). From MNIST results, we can see that the con-
volutional layers model is more robust than fully con-
nected layers models especially for filters with size
not exceeding 13 × 13. This is expected since the
convolutional models capture shapes using the con-
volution operator. Consequently, filtering has a low
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
424
Table 2: Neural Networks used for the evaluation of convolutional attacks.
Dataset Model Type #units #Layers Activation function
MNIST 3 × 50 fully connected 110 3 ReLU
3 × 100 fully connected 210 3 ReLU
6 × 100 fully connected 510 6 ReLU
9 × 200 fully connected 1, 610 9 ReLU
convMaxPool convolutional 13,798 9 ReLU
CIFAR10 4 × 100 fully connected 140 4 ReLU
6 × 100 fully connected 610 6 ReLU
9 × 200 fully connected 1, 810 9 ReLU
convMaxPool convolutional 53,938 9 ReLU
Figure 3: MNIST robustness variation according to the filer’s size.
Figure 4: CIFAR robustness variation according to the filer’s size.
impact on robustness although it modifies the images
content. Beyond this size (13 ×13), model robustness
decrease, same for fully connected models with the
exception of the mnist relu 3 50 model. Indeed, fil-
tering the images with a large filter greatly modifies
the initial information in the images. mnist relu 3 50
model did not capture details on the images during
training stage. Therefore, it is invariant with respect
to the filtering operation.
Result obtained using CIFAR10 dataset, illus-
trated in figure 4, confirm that multilayer perceptron
models are more sensitive to filtering regardless of the
dataset. However, the robustness on CIFAR is overall
more important by comparing it with robustness on
Towards a Certification of Deep Image Classifiers against Convolutional Attacks
425
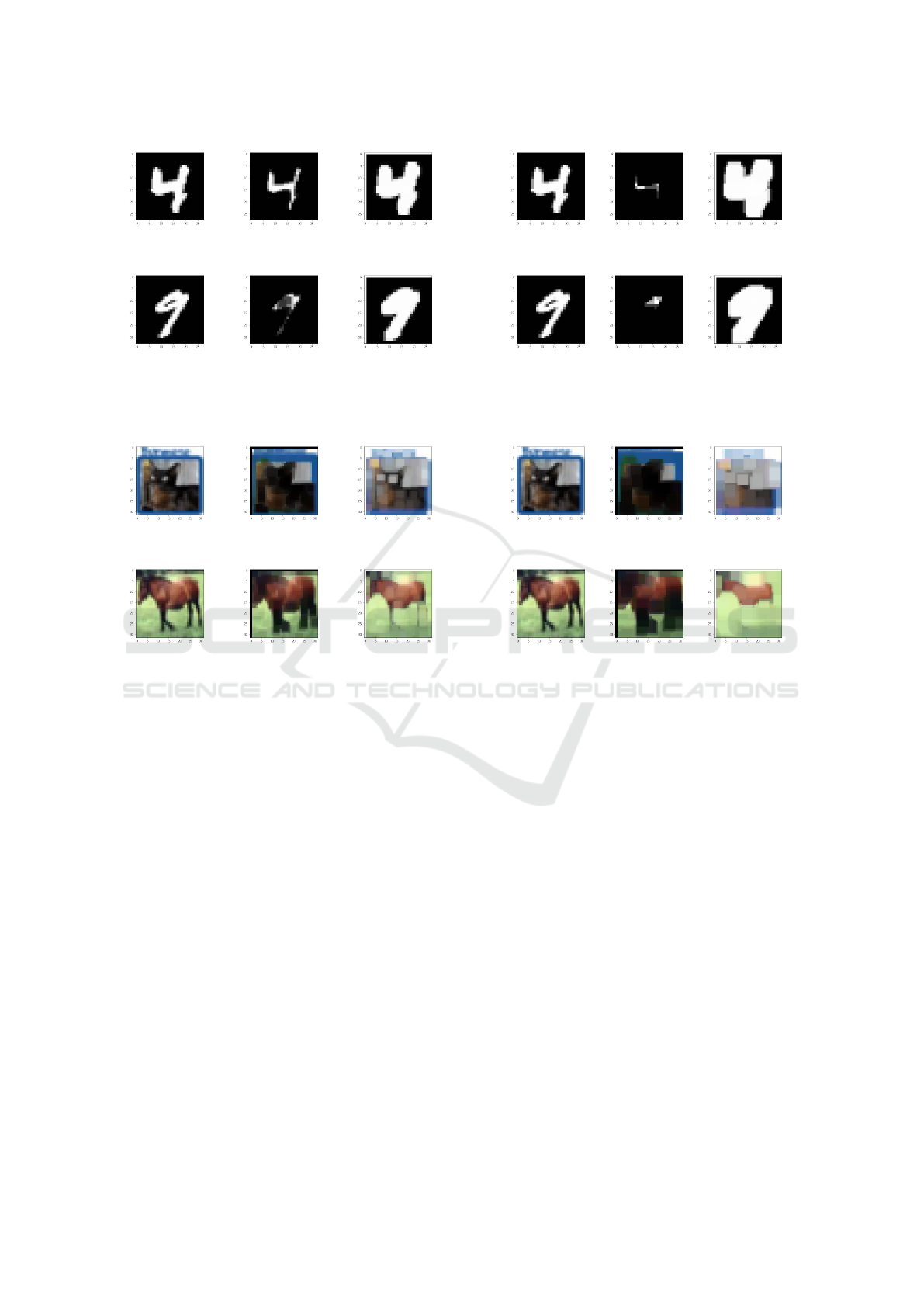
(a) Real image (b) Convolu-
tion LB
(c) Convolu-
tion UB
(d) Real image (e) Convolu-
tion LB
(f) Convolu-
tion UB
Figure 5: MNIST Database: Lower and Upper bounds in
Convolutional attacks (for dim1=0 and dim2=1).
(a) Real image (b) Convolu-
tion LB
(c) Convolu-
tion UB
(d) Real image (e) Convolu-
tion LB
(f) Convolu-
tion UB
Figure 6: CIFAR10 Database:Lower and Upper bounds in
Convolutional attacks (for dim1=0 and dim2=1).
MNIST. This is due to several factors. First, the CI-
FAR images are larger which changes the proportion
between the filter size and the image size. Second, in
the presence of a convolution-type disturbance, part
of the information will be deleted from the initial im-
age. Cifar models may persist because images contain
more information and more texture. Such interpreta-
tion can be deduced by comparing image 5e in figure
5 with image 6e in figure 6. For this reason the NN
models which are trained on CIFAR are, overall, more
robust against convolutional attacks.
Nevertheless, all models are sensitive to convolu-
tion attacks with a maximum of 30% of robustness.
This could be interpreted as the model learns more
on the object texture than on the object structure, this
makes the model lose (dramatically) on robustness
even with a small disturbance of the structure.
(a) Real image (b) Convolu-
tion LB
(c) Convolu-
tion UB
(d) Real image (e) Convolu-
tion LB
(f) Convolu-
tion UB
Figure 7: Lower and Upper bounds in Convolutional attacks
(for dim1=0 and dim2=2).
(a) Real image (b) Convolu-
tion LB
(c) Convolu-
tion UB
(d) Real image (e) Convolu-
tion LB
(f) Convolu-
tion UB
Figure 8: Lower and Upper bounds in Convolutional attacks
(for dim1=0 and dim2=2).
6 CONCLUSIONS
We introduced a new method for certifying deep neu-
ral networks robustness against filtering attacks. The
core idea of this work is the extension of the abstract
interpretation based certification method, which is an
abstract domain suitable to compute the LB and the
UB in the presence of convolution. To the best of our
knowledge this is the first study that tries to prove, by
the proposed method we showed, for the first time,
how to prove the robustness of a neural network when
the input image is convoluted by a random kernel. We
tested our method with DeepPoly analyzer, and eval-
uated it extensively on a wide range of networks of
different sizes and different architectures. We believe
this work is a promising step towards more effective
evaluation of deep neural networks against convolu-
tional attacks such as blurring, enhancement, smooth-
ing and filtering. In a future study, we propose to op-
timize our abstract domain to achieve more precision.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
426

(a) Real image (b) Convolu-
tion LB on red
channel
(c) Convolu-
tion UB on red
channel
(d) Real image (e) Convolu-
tion LB on
green channel
(f) Convolu-
tion UB on
green channel
(g) Real image (h) Convolu-
tion LB on
blue channel
(i) Convolu-
tion UB on
blue channel
Figure 9: Lower and Upper bounds in Convolutional attacks
(for dim1=0 and dim2=1).
We will also consider the optimisation of neural net-
work architecture for training neural networks to be
provably robust against convolutional attacks.
REFERENCES
Alaifari, R., Alberti, G. S., and Gauksson, T. (2018). Adef:
an iterative algorithm to construct adversarial defor-
mations. arXiv preprint arXiv:1804.07729.
Balunovic, M., Baader, M., Singh, G., Gehr, T., and Vechev,
M. (2019). Certifying geometric robustness of neural
networks. In Advances in Neural Information Pro-
cessing Systems, pages 15313–15323.
Biggio, B., Corona, I., Maiorca, D., Nelson, B.,
ˇ
Srndi
´
c, N.,
Laskov, P., Giacinto, G., and Roli, F. (2013). Eva-
sion attacks against machine learning at test time. In
Joint European conference on machine learning and
knowledge discovery in databases, pages 387–402.
Springer.
Bunel, R. R., Turkaslan, I., Torr, P., Kohli, P., and
Mudigonda, P. K. (2018). A unified view of piece-
wise linear neural network verification. In Advances in
Neural Information Processing Systems, pages 4790–
4799.
Cousot, P. and Cousot, R. (1992). Abstract interpretation
and application to logic programs. The Journal of
Logic Programming, 13(2-3):103–179.
Engstrom, L., Tran, B., Tsipras, D., Schmidt, L., and
Madry, A. (2019). Exploring the landscape of spatial
robustness. In International Conference on Machine
Learning, pages 1802–1811. PMLR.
Fawzi, A., Moosavi-Dezfooli, S.-M., and Frossard, P.
(2017). The robustness of deep networks: A geomet-
rical perspective. IEEE Signal Processing Magazine,
34(6):50–62.
Gedraite, E. S. and Hadad, M. (2011). Investigation on the
effect of a gaussian blur in image filtering and seg-
mentation. In Proceedings ELMAR-2011, pages 393–
396. IEEE.
Gehr, T., Mirman, M., Drachsler-Cohen, D., Tsankov, P.,
Chaudhuri, S., and Vechev, M. (2018). Ai2: Safety
and robustness certification of neural networks with
abstract interpretation. In 2018 IEEE Symposium on
Security and Privacy (SP), pages 3–18. IEEE.
Ghorbal, K., Goubault, E., and Putot, S. (2009). The zono-
tope abstract domain taylor1+. In International Con-
ference on Computer Aided Verification, pages 627–
633. Springer.
Goodfellow, I., Lee, H., Le, Q., Saxe, A., and Ng, A. (2009).
Measuring invariances in deep networks. Advances in
neural information processing systems, 22:646–654.
Henry, J. (2014). Static Analysis by Abstract Interpretation
and Decision Procedures. PhD thesis, Universit
´
e de
Grenoble.
Jaderberg, M., Simonyan, K., Zisserman, A., et al. (2015).
Spatial transformer networks. Advances in neural in-
formation processing systems, 28:2017–2025.
Kanbak, C., Moosavi-Dezfooli, S.-M., and Frossard, P.
(2018). Geometric robustness of deep networks: anal-
ysis and improvement. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 4441–4449.
Katz, G., Barrett, C., Dill, D. L., Julian, K., and Kochender-
fer, M. J. (2017). Reluplex: An efficient smt solver for
verifying deep neural networks. In International Con-
ference on Computer Aided Verification, pages 97–
117. Springer.
Krizhevsky, A., Hinton, G., et al. (2009). Learning multiple
layers of features from tiny images.
LeCun, Y. (1998). The mnist database of handwritten digits.
http://yann. lecun. com/exdb/mnist/.
LeCun, Y., Bottou, L., Bengio, Y., Haffner, P., et al. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Li, J., Liu, J., Yang, P., Chen, L., Huang, X., and Zhang,
L. (2019). Analyzing deep neural networks with sym-
bolic propagation: towards higher precision and faster
verification. In International Static Analysis Sympo-
sium, pages 296–319. Springer.
Li, R., Li, J., Huang, C.-C., Yang, P., Huang, X., Zhang,
L., Xue, B., and Hermanns, H. (2020). Prodeep: a
platform for robustness verification of deep neural net-
works. In Proceedings of the 28th ACM Joint Meeting
on European Software Engineering Conference and
Symposium on the Foundations of Software Engineer-
ing, pages 1630–1634.
Pulina, L. and Tacchella, A. (2010). An abstraction-
refinement approach to verification of artificial neural
Towards a Certification of Deep Image Classifiers against Convolutional Attacks
427

networks. In International Conference on Computer
Aided Verification, pages 243–257. Springer.
Ruoss, A., Baader, M., Balunovi
´
c, M., and Vechev, M.
(2020). Efficient certification of spatial robustness.
arXiv preprint arXiv:2009.09318.
Sallami, M. M., Khedher, M. I., Trabelsi, A., Kerboua-
Benlarbi, S., and Bettebghor, D. (2019). Safety and
robustness of deep neural networks object recogni-
tion under generic attacks. In International Confer-
ence on Neural Information Processing, pages 274–
286. Springer.
Singh, G., Gehr, T., Mirman, M., P
¨
uschel, M., and Vechev,
M. (2018). Fast and effective robustness certification.
In Advances in Neural Information Processing Sys-
tems, pages 10825–10836.
Singh, G., Gehr, T., P
¨
uschel, M., and Vechev, M. (2019a).
An abstract domain for certifying neural networks.
Proceedings of the ACM on Programming Languages,
3(POPL):41.
Singh, G., Gehr, T., P
¨
uschel, M., and Vechev, M. T. (2019b).
Boosting robustness certification of neural networks.
In ICLR (Poster).
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Er-
han, D., Goodfellow, I., and Fergus, R. (2013). In-
triguing properties of neural networks. arXiv preprint
arXiv:1312.6199.
Vassaux, B., Nguyen, P., Baudry, S., Bas, P., and Chassery,
J.-M. (2002). Survey on attacks in image and video
watermarking. In Tescher, A. G., editor, Applications
of Digital Image Processing XXV, volume 4790, pages
169 – 179. International Society for Optics and Pho-
tonics, SPIE.
Xiao, C., Zhu, J.-Y., Li, B., He, W., Liu, M., and Song, D.
(2018). Spatially transformed adversarial examples.
arXiv preprint arXiv:1801.02612.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
428
