
Evaluating Two Ways for Mobile Robot Obstacle Avoidance with Stereo
Cameras: Stereo View Algorithms and End-to-End Trained
Disparity-sensitive Networks
Alexander K. Seewald
Seewald Solutions, L
¨
archenstraße 1, A-4616 Weißkirchen a.d. Traun, Austria
Keywords:
Deep Learning, Obstacle Avoidance, Autonomous Robotics, Mobile Robotics, View Disparity, Stereo View
Algorithms.
Abstract:
Obstacle avoidance is an essential feature for autonomous robots. Recently, stereo view algorithm challenges
have started to focus on fast algorithms with low computational expense, which may enable obstacle avoidance
on mobile robots using only stereo cameras. Therefore we have evaluated classical and state-of-the-art stereo
salgorithms qualitatively using internal datasets from Seewald (2020), showing that – although improvements
are discernable – current algorithms still fail at this task. As it is known (e.g. from Muller et al. (2004))
that deep learning networks trained on stereo views do not rely on view disparity – confirmed by the fact that
networks perform almost equally well when trained with only one camera image – we present an alternative
network which is end-to-end trained on a simple layer of biologically plausible disparity-sensitive cells and
show that it performs equally well as systems trained on raw image data, but must by design rely on view
disparity alone.
1 INTRODUCTION
Obstacle avoidance is an essential feature for au-
tonomous robots, the lack of which can make the es-
timation of the robot’s intelligence drop dramatically.
As benchmark task it has been known from the be-
ginning of autonomous robotics and is usually solved
with specialized sensors and Simultaneous Localiza-
tion and Mapping algorithms (SLAM, Cadena et al.
(2016)). However, different sensors have different er-
ror modes and multiple sensor classes must be com-
bined to obtain acceptable results; and SLAM algo-
rithms rely on complex map-building, are not robust
enough for a wide variety of environments, and are
very tricky to set up, adjust and make sufficiently ro-
bust for even one given environment.
Recently stereo algorithm challenges such as the
Robust Vision Challenge
1
have focussed on robust vi-
sion of the kind that may be useful to mobile robots
as an alternative for near obstacle avoidance that does
not rely on combining specialized sensors or map-
building.
Here, we have qualitatively evaluated classical as
well as state-of-the-art stereo algorithms on internal
1
https://robustvision.net
datasets from our ToyCollect robot platform (Seewald
(2020)). These datasets only include stereo views and
thus cannot be quantitatively evaluated but are repre-
sentative of the type of stereo views commonly ob-
tained with mobile robots. Our qualitative evaluation
indicates that despite the excellent results of state-of-
the-art stereo algorithms on high-quality benchmark
stereo views, these results transfer only to a very small
extent to real-life stereo views.
We speculate that this is due to the algorithms
determining distance by occlusion, linear perspec-
tive, size perspective, distribution of shadows and il-
lumination, and familiar size (Kandel et al. (2000),
p. 558f) – all of which are likely to differ between
benchmark datasets and our internal datasets – and
rely only to a limited extent – if at all – on view dis-
parity. This is surprising as the human visual system
relies very strongly on view disparity for near obstacle
detection. Further support for this comes from end-
to-end deep-learning models for obstacle avoidance
trained directly on stereo views (Muller et al. (2004)),
where it is known that models trained using informa-
tion from just one camera perform almost as well as
models trained using information from both cameras.
Seewald, A.
Evaluating Two Ways for Mobile Robot Obstacle Avoidance with Stereo Cameras: Stereo View Algorithms and End-to-End Trained Disparity-sensitive Networks.
DOI: 10.5220/0010878500003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 663-672
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
663

Table 1: Robot Hardware Overview.
Type Robot Base Motors
Motor
controller
Camera Controller Chassis Power LocalDL
v1.3
(K3D)
Pololu Zumo
(#1418)
2x Pololu 100:1
brushed motors
(#1101)
Pololu Qik
2s9v1 Dual
Serial (#1110)
1x RPi Camera Rv1.3
w/ K
´
ula3D Bebe
Smartphone 3D lens
2
1x RPi 3B+
Modified
transparent
chassis
3
4x 3.7V 14500 LiIon
Yes
8fps
v1.21
(R2X)
Pololu Zumo
(#1418)
2x Pololu 100:1
brushed motors
(#1101)
Pololu Qik
2s9v1 Dual
Serial (#1110)
2x RPi Camera Rv2.1 2x RPi ZeroW
Three-part
3D-printed
chassis
4
4x 3.7V 14500 LiIon or
4x 1.5V AA Alkaline or
4x 1.2V AA NiMH
No
<1fps
v2.2
(OUT)
Dagu Robotics
Wild Thumper
4WD (#RS010)
4x 75:1 brushed
motors (included)
5
Pololu Qik
2s12v10 Dual
Serial (#1112)
2x RPi Camera Rv2.1
1x RPi CM3
on official
eval board
None
(open
case)
1x 7.2V 2S 5000mAh LiPo
Yes
8fps
As the lack of depth maps in our internal datasets
prevents us from retraining state-of-the-art stereo al-
gorithms, we have instead created an end-to-end
trained deep learning network which is forced to learn
from view disparity by mapping the network input
from raw image data to a simple approximation of
disparity-sensitive cells known to exist in monkey vi-
sual cortex (Kandel et al. (2000), p. 562 and Fig. 28-
14). We then proceed to show that such a network
performs as well at the obstacle avoidance task as the
original end-to-end-trained model using raw stereo
view images presented in Seewald (2020). Limita-
tions in the used hardware and software platforms pre-
vent us from testing the new model directly on our
robots for now, so we leave that part for future work.
2 RELATED RESEARCH
As far as we know, no previous qualitative evaluation
of stereo view algorithms in a mobile robotics setting
for obstacle avoidance has been done. Neither are we
aware of any attempt to explicitly force end-to-end
trained deep learning networks to rely on view dispar-
ity for obstacle avoidance. So we will instead describe
earlier attempts at obstacle avoidance here.
Muller et al. (2006) describe a purely vision-based
obstacle avoidance system for off-road mobile robots
that is trained via end-to-end deep learning. It uses
a six-layer convolutional neural network that directly
processes raw YUV images from a stereo camera
pair. They claim their system shows the applicabil-
ity of end-to-end learning methods to off-road obsta-
cle avoidance as it reliably predicts the bearing of
traversible areas in the visual field and is robust to
the extreme diversity of situations in off-road envi-
ronments. Their system does not need any manual
calibration, adjustments or parameter tuning, nor se-
lection of feature detectors, nor designing robust and
2
A double periscope that divides the camera optical path
into two halves and moves them apart using mirrors, effec-
tively creating a stereo camera pair from one camera.
3
Sadly, no longer available
4
Can be plotted as one part for perfect alignment.
5
Left two and right two are each connected.
fast stereo algorithms. They note some important
points w.r.t. training data collection which we have
also noted and applied for our data collection:
• High diversity of training grounds.
• Various lighting conditions.
• Collect sequences where robot starts moving
straight and then moves left/right around obstacle.
• Avoid turns when no obstacles are present.
• Include straight runs with no obstacles nor turns.
• Turn at approx. same distance from an obstacle.
The earlier published technical report, Muller et al.
(2004), extends the previously mentioned paper with
additional experiments, a much more detailed de-
scription of the hardware setup, and a slightly more
detailed description of the deep learning network. A
training and test environment is described. An even
more detailed description of how training data was
collected is given. They found that using informa-
tion from just one camera performs almost as well as
using information from both cameras, which is sur-
prising. Modified deep learning networks which try
to control throttle as well as steering angle and also
utilize additional sensors performed disappointingly.
Bojarski et al. (2016) describe a system similar to
Muller et al. (2006) that is trained to drive a real car
using 72 hours of training data from human drivers.
They note that the distance between crashes of the
original DAVE system was about 20 meters. They add
artificial shifts and rotations to the training data. They
report an autonomy values of 98%, corresponding to
one human intervention every 5 minutes. However,
their focus is on lane following and not on obstacle
avoidance. They used three cameras – left, center,
right – and a complex ten layer convolutional neural
network.
Pfeiffer et al. (2016) describe an end-to-end mo-
tion planning system for autonomous indoor robots.
It goes beyond our approach in also requiring a tar-
get position to move to, but uses only local informa-
tion which is similar to our approach. However, their
approach uses a 270
◦
laser range finder and cannot
be directly applied to stereo cameras. Their model
is trained using simulated training data and as such
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
664

Figure 1: Robots K3D, R2X, OUT (left to right, ruler units: cm).
Figure 2: FOV comparison between robot R2X and K3D.
has some problems navigating realistic office environ-
ments.
Wang et al. (2019) describe a convolutional neu-
ral network that learns to predict steering output from
raw pixel values. Contrary to our approach, they
use a car driving simulator instead of real camera
recordings, and they use three simulated cameras in-
stead of our two real cameras.They explicitly address
overfitting and vanishing gradient which may reduce
the achievable performance also in our case.
6
They
note several papers on end-to-end-learning for au-
tonomous driving including Muller et al. (2006) –
however it should be noted that most of the mentioned
papers are concerned with car driving and lane fol-
lowing, and not with obstacle avoidance, which are
overlapping but different problems.
Khan and Parker (2019) describe a deep learn-
ing neural network that learns obstacle avoidance in
a class room setting from human drivers, somewhat
similar to our system. As starting point they use a
deep learning network that has been trained on an im-
age classification task and reuse some of the hidden
layers for incremental training. However, their ap-
proach uses only one camera and cannot be directly
applied to stereo cameras. Still, their results seem
6
Especially for the smaller OUT Train dataset.
promising and will be considered for future experi-
ments.
Luo et al. (2019) describe a combined robot sys-
tem of ad-hoc code with a pretrained deep learning
network that successfully tracks and follows a second
robot in two settings. They mainly focus on tracking
and not on obstacle avoidance as we do here. Track-
ing uses a modified YOLO deep learning network for
initial slow object detection and a kernel correlation
filter for continuous fast tracking. Obstacle avoidance
relies exclusively on an active sensing depth camera
– which we also plan to integrate into our platform in
the near future – and is not separately evaluated.
Becker and Ebner (2019) describe a robot system
to detect obstacles a posteriori by acceleration sensor
data. They propose a logistic regression model trained
on known collisions as detected by a human observer,
and show that it can detect new collisions in 13 out of
14 cases. However, as we try to avoid obstacles their
approach cannot be directly applied. It would still be
useful for autonomous collection of training data and
online retraining without relying on more commonly
used bumper sensors.
Evaluating Two Ways for Mobile Robot Obstacle Avoidance with Stereo Cameras: Stereo View Algorithms and End-to-End Trained
Disparity-sensitive Networks
665

3 ToyCollect PLATFORM
All data was collected with our ToyCollect robotics
open source hardware/software platform ( https://tc.
seewald.at ). A hardware overview of the three uti-
lized robots can be found in Table 1 while Fig.1 shows
images for each robot with rulers for scale.
While robots OUT and K3D need only a sin-
gle main controller and have sufficient computational
power to run a small deep-learning model at interac-
tive frame rates (around 8 frames-per-second) – thus
enabling onboard processing – the need for two cam-
eras on R2X necessitates the usage of two controllers,
each connected to one camera, and each streaming the
frames independently to a processing server.
OUT and R2X each use two cameras with a field-
of-view of 62.2
◦
horizontal and 48.8
◦
vertical, how-
ever for K3D we used the older camera which has
only 54
◦
horizontal and 41
◦
vertical field-of-view and
the horizontal viewing angle is approximately halved
again by the 3D smartphone lens. Fig.2 shows the
difference in field-of-view between K3D and R2X.
OUT also includes a depth camera, GPS module,
a 10-DOF inertial measurement unit including an ac-
celerometer, gyroscope, magnetometer and a barome-
ter for attitude measurement as well as a thermometer,
and four ultrasound sensors. However these were not
used for our experiments.
R2X includes two high-power white LEDs to al-
low operation in total darkness and whose brightness
can be controlled in 127 steps. However these also
were not used for our experiments.
Unfortunately it is not possible to connect two
cameras to a RPi controller since the necessary con-
nections are only available on the chip and not on
the PCB. Only the ComputeModule allows to directly
connect two cameras; however the official evaluation
boards for the RPi compute module are too large to
fit on the small robot. So for robot R2X we integrated
two RPi Zero Ws into a single robot chassis and con-
nected each to a separate camera.
7
However since the
RPi Zero W is based on the original RPi 1, it is much
too slow for online deep learning model processing
and achieves less than 1 frames per second. So for
this robot we must stream the video frames to a sec-
ond more powerful plattform.
7
In the meantime other options have become available,
e.g. StereoPi, which we are currently evaluating.
4 DATA COLLECTION
We collected two different types of data (consisting
of frames and speed/direction control input
8
) for in-
door and outdoor obstacle avoidance. In each case we
aimed for a consistent avoidance behaviour roughly
at the same distance from each obstacle similar to
that described in Muller et al. (2006) (see also Sec.2).
However, instead of collecting many short sequences,
we collected large continuous sequences and after-
wards filtered the frames with a semi-automated ap-
proach. All data was collected by students during
summer internships in 2017, 2018 and 2019. The
students were made aware of the conditions for data
collection, and were supervised for about one fifth of
recording time to ensure compliance.
The collected datasets can be found in Table 2.
R2X Train and OUT Train were those used for train-
ing the correspondingly named robots in Seewald
(2020).
For indoor obstacle avoidance (robots R2X, K3D)
we initially collected 557,640 frames in a variety of
indoor and outdoor settings with a small set of small
mobile robots. For training we restricted them to
267,617 frames recorded by the latest robot in 2019 to
ensure all recordings were done with the same cam-
eras which were later also used for evaluation. Stereo
views were collected directly onboard R2X robots
in uncompressed YUV 4:2:2 format on SD cards in
640x368 resolution at 10fps. Control of the robot was
via paired Bluetooth controller. We first inspected
the recorded sequences manually and removed those
with technical issues (e.g. no movement, cameras
not synchronized, test runs). Because of synchro-
nization issues, the first minute of each sequence (up
to the point when each MASTER and SLAVE syn-
chronize with an external time server
9
) had to be re-
moved. Additionally, sequences with very slow speed
and with backward movement (negative speed) were
removed along with 50ms of context. Since both cam-
eras were independently recorded, we also removed
all frames without a partner frame that is at most
50ms
10
apart. We also removed frames where move-
ment information is not available within ±25ms of the
average timestamp for the image frames. Lastly, we
had to remove 80% of the frames with straight for-
ward movement as otherwise these would have domi-
nated the training set. After all these filters, 70,745
8
Only direction (steering) is used for training.
9
The RPi platform does not offer a realtime clock and
thus suffers from significant clock drift. It would have
been quite simple to synchronize local clock during MAS-
TER/SLAVE synchronization but we failed to consider it.
10
Half of 100ms (i.e. 10fps recording frequency)
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
666

Table 2: Datasets.
Name
Coll.by
robot
Size
DL
Train?
Qual.
Eval?
Comments
Mixed R2X 557,640 No Yes Indoors and outdoors near houses
Outside OUT 51,735 No Yes Outdoors, fields, forests, small streets, walkways and trails
R2X Train R2X 70,745 Yes No Curated subset of Mixed and recorded on a single robot, in-
cludes only indoor scenes.
OUT Train OUT 27,368 Yes No Curated subset of Outside
K3D Train R2X 70,745 Yes No R2X Train dataset restricted to field-of-view of K3D robot (see
Fig. 2)
frames remained which we distributed into 13,791
(20%) frames for testing and 56,954 (80%) for train-
ing.
For outdoor obstacle avoidance (robot OUT) we
collected 66,057 frames in a variety of outdoor set-
tings. These were collected on a mobile phone con-
nected via Wi-fi to an OUT robot. The phone also
translated the phone-paired Bluetooth controller com-
mands to Wi-fi and sent them to the robot. These steps
were necessary since at that time no Compute Mod-
ule with significant onboard memory was available.
11
The frames were collected in 1280x720 resolution in
raw H264 format at 15fps. A preliminary curating
step removed those sequences where the robot stood
still, was being repaired or when movement com-
mands were not accepted by the robot. This yielded
the 51,735 frames for Outside in Table 2. We then
used the same additional filtering as above and ob-
tained 27,368 frames which we distributed into 5,351
(20%) for testing and 22,017 (80%) for training.
In all cases except K3D the frames were down-
scaled to half recording resolution via linear interpo-
lation while preserving aspect ratio. For K3D, where
only a part of the frame was used for training and test-
ing due to its much smaller horizontal field-of-view
(see Fig. 2), the stereo views were not scaled down
but used at the original resolution.
For the qualitative evaluation of stereo algorithms
we used the stereo images as-is (except for linear up-
and downscaling). For the disparity-sensitive deep
learning model (NCC-Disp) experiments, we instead
computed the normalized correlation coefficient (see
Eq. 1) between patches of the Left and Right stereo
views using 8x8 pixel-sized patches and disparities of
0, 1, 2, 4, 8, 16 and 32 pixels. Patches were moved
in half-patch-size (4 pixel) steps. We obtained seven
channels with a resolution of 78x44 pixels for OUT
and R2X, but 62x48 pixels for K3D due to the differ-
ent aspect ratio and resolution.
11
The old RPi ComputeModule evaluation board offers
neither an SD card slot nor Bluetooth and the only available
USB slot was needed for a Wi-fi USB stick.
5 QUALITATIVE EVALUATION
OF STEREO ALGORITHMS
We evaluated the following stereo algorithms, using
the stereo views described in the previous section. We
ran the algorithms on our datasets from Table 2. In
each case, we chose a random sample of about 50
frames and evaluated them w.r.t. the usefulness for
obstacle avoidance into three categories. We also in-
spected extensive simulated runs of each algorithm
where frames were processed in the same order as
they would be processed on the robot.
• Good: Good stereo depth reconstruction with at
most small errors.
• Mediocre: Stereo depth reconstruction with ma-
jor errors but still somewhat useful for obstacle
avoidance.
• Bad: Incorrect stereo depth reconstruction with
at most small patches with approximately correct
depth; useless for obstacle avoidance purposes.
Since we were interested in comprehensive perfor-
mance, we chose the largest, most diverse dataset
Mixed, and for promising algorithms additionally the
dataset Outside to enable some comparison w.r.t. nat-
ural scene performance.
1. GraphCut (GC, from Kim et al. (2003) as KZ1)
2. Block Matcher (BM, Konolige (1998))
3. Semi-Global Block Matcher (SGBM,
Hirschmuller (2008))
4. HITNet (Tankovich et al. (2021))
Reflections on the wooden parquet floor in dataset
Mixed sometimes made the system merge objects
with their reflections, making them seemingly appear
below the floor. As this must be addressed separately,
we have disregarded such errors in our evaluation.
We used the OpenCV (Bradski (2000)) implemen-
tation of all algorithms except HITNet, which was
available as a GIThub project with pretrained Ten-
Evaluating Two Ways for Mobile Robot Obstacle Avoidance with Stereo Cameras: Stereo View Algorithms and End-to-End Trained
Disparity-sensitive Networks
667

NCC(i, j, d) =
∑
∀i
0
, j
0
∈[0,7]
L(4i + i
0
, 4 j + j
0
)R(4i + i
0
− d, 4 j + j
0
)
q
∑
∀i
0
, j
0
∈[0,7]
L(4i + i
0
, 4 j + j
0
)
2
∑
∀i
0
, j
0
∈[0,7]
R(4i + i
0
− d, 4 j + j
0
)
2
(1)
Table 3: Results of qualitative evaluation. Mixed: 56, Out-
side: 52 stereo views were randomly selected and manually
analyzed by visual inspection. For definition of category
labels see text. Last column: proportion of non-bad stereo
views.
Stereo
Alg.
Dataset bad med. good
Prop.
¬bad
GC Mixed 48 8 0 14.28%
BM Mixed 51 5 0 8.92%
SGBM Mixed 46 10 0 17.85%
SGBM Outside 39 13 0 25.00%
HITnet Mixed 25 29 2 55.35%
HITnet Outside 19 32 1 63.46%
sorflow models.
12
Results can be found in Table 3,
however we will also comment on the strengths and
weaknesses of the tested algorithms in the following
subsections. The latter is based on the simulated runs
mentioned earlier.
5.1 GraphCut
GraphCut was one of the first stereo algorithms, how-
ever it is also one of the slowest. It is described in Kim
et al. (2003) (as KZ1). With the default maximum
disparity of 16 it is about 100 times slower than the
fastest algorithm. Visual inspection shows many large
dark areas and black dots where no depth informa-
tion is reconstructed. During robot turns it becomes
completely white indicating minimum distance. A
maximum disparity of 40 with two-fold downscaling
made it slightly slower but the depth map became very
rough and pixelated. Again blobs were often found
with other depths that were overlaid over walls or flat
objects. Walls were sometimes well detected but only
shortly. It does seem as if GC only detected axis-
parallel walls and does not deal with gradients. We
only ever saw blocks in one color (depth). In a way
the best scenes remind of HITNet – except the restric-
tion on axis-parallel walls – but processing speed is of
course several orders of magnitudes slower.
5.2 Block-Matching (BM)
Block-Matching (BM, Konolige (1998)) determines
disparity by matching blocks between both stereo
views. We’ve again used two-fold linear downscal-
ing for this algorithm. The depth map is very noisy
and seems to work only on flat surfaces. Convex sur-
faces have good disparity values only at the border.
12
https://github.com/google-research/google-research/
tree/master/hitnet
The floor shows very little depth information even
when structured, e.g. parquet or ceramic tiles. Walls
are very hard to discern, and many floor tile seams
have completely wrong depth values. In many cases
only corners and edges have depth data and the rest
of the image is black. When turning, worse depth
maps are obtained, and motion blur is clarly discern-
able – when driving straight ahead for half a second
the depth maps stabilizes again and gives better but
still not useful results.
5.3 Semi-Global Block Matching
(SGBM)
Semi-Global Block Matching (SGBM, Hirschmuller
(2008)) is a much more intelligent version of Block-
Matching. With linear two-fold downscaling it runs
quite fast. When the robot is moving straight ahead
walls are often visible relatively well, unlike the floor.
When the robot turns, depth information vanishes ex-
cept for thick edges, but reestablish after a few sec-
onds. Parquet floor and the furniture of the same color
is not clearly differentiated, perhaps due its similarity
in color and texture. In complex scenes many differ-
ent patches with different distances are visible. Con-
cluding, SGBM is not perfect but still quite an im-
provement over BM.
A window size of 9x9 seems to work best and
gives reasonable results with simple scenes. For Out-
side, disparities do not change from frame to frame,
perhaps because the Compute Module platform had
lower latency since both cameras were attached to one
module (rather than two modules as for Mixed). Trees
and skies are sometimes easily discernable but trees
are not well separated. Objects are sometimes visible
but very noisy and blurry. A smaller size increases
noise in estimated depth, a larger size makes dispari-
ties change from frame to frame, probably due to the
less exact alignment, and makes object contours much
more blurry. Robot turns still create artefacts for all
tested window sizes of 3x3, 9x9 and 21x21.
5.4 HITNet
The main reason to use HITNet (Tankovich et al.
(2021)) was that it was a relatively fast current Deep
Learning network that performed well on benchmark
datasets, and was also the highest-ranking model on
Middlebury (at that time of running the experiments)
for which pretrained models were readily available.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
668
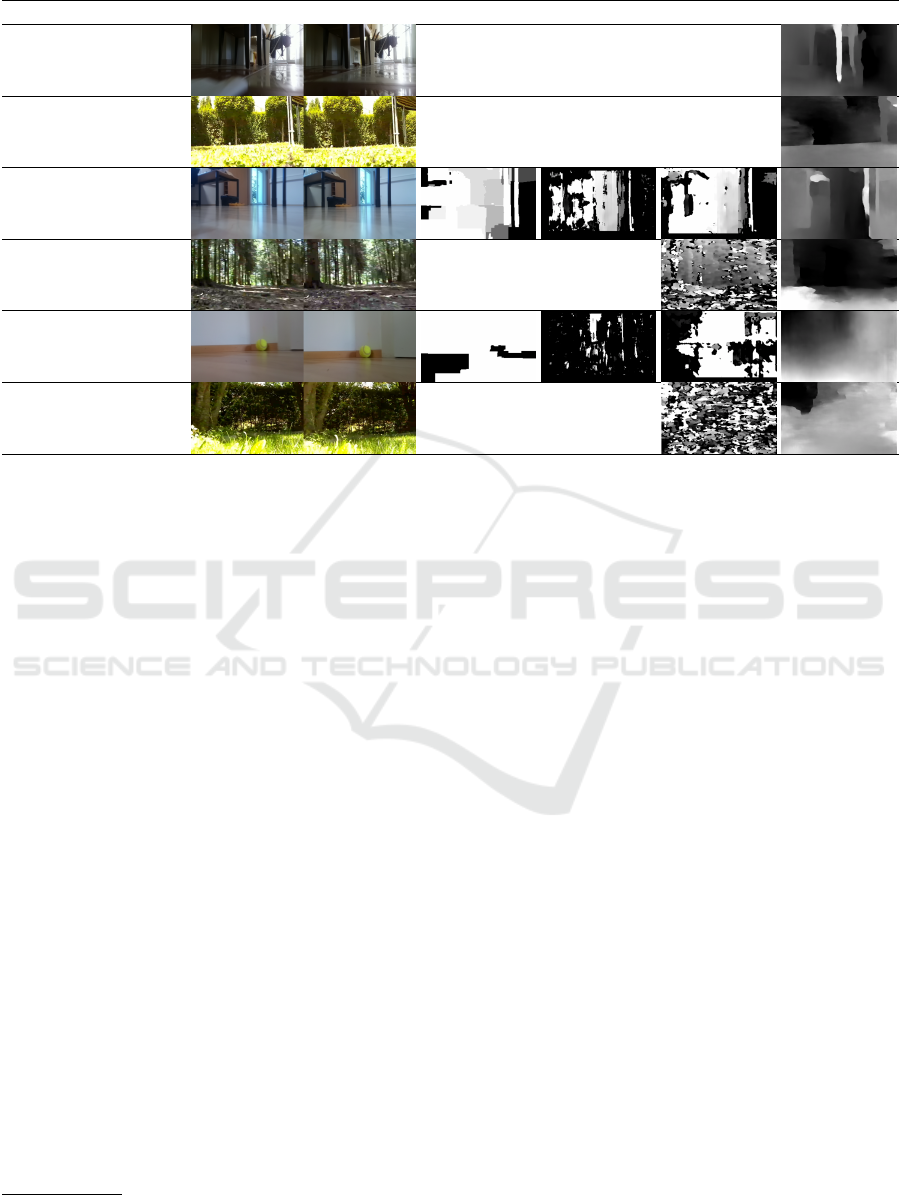
Table 4: Sample images for the three categories bad, mediocre and good.
Cat. Dataset Stereo views GC BM SGBM HITnet
good
Mixed
good
Outside
mediocre
Mixed
mediocre
Outside
bad
Mixed
bad
Outside
We evaluated two different pretrained versions of
HITNet – eth3D and middlebury – on a random sam-
ple of 105 frames from Mixed using the pooled ver-
sion eth3D with two-fold linear downsampling, and
middlebury with two-fold linear upsampling.
13
In
48 cases, the depth map was clearly wrong for both
versions and we were unable to even approximately
match the shown depth maps to the stereo view by
visual inspection; in 41 cases, the eth3D version per-
formed better; and in 11 cases, the middlebury ver-
sion performed better. In 5 cases there was no signif-
icant difference. This indicates – not surprisingly –
that the eth3D version which was pooled over KITTI,
eth3D and middlebury datasets performs much better
than the version trained just on Middlebury. About 5
frames looked really well and would have been very
useful for obstacle avoidance could this behaviour be
obtained everywhere. We therefore chose the pooled
eth3D pretrained version for the qualitative evalua-
tion.
HITNet showed small fluctuations even with
stereo views that change very little (i.e. when the
robot is not moving at all), and strong fluctuations
during movement (perhaps due to the random latency
of Mixed dataset). Every movement – including ro-
tation – shows artefacts. Still HITNet was a signif-
icant improvement even over SGBM and sometimes
showed good depth maps which even allowed to de-
tect small objects (about every 20th frame). It is also
the only algorithm for which we actually found stereo
views of category good.
13
According to pers.comm. by V. Tankovich.
Using the Outside dataset also indicated that
around every second frame was somewhat useful, but
very noisy, and also that only very near objects are
somewhat reliably detected every second frame, but
sadly not in consecutive order – in most cases se-
quences of bad depth maps alternate with sequences
of mediocre depth maps. However in some cases HIT-
Net also hallucinated objects – some of these were
due to reflections and were disregarded but others
were clear mistakes. The Outside dataset does seem
to work slightly better than Mixed, however this could
be due to the better temporal alignment of the stereo
views for Outside.
It is clear from the results in Table 3 that HITnet
is about two to three times better than the best clas-
sical algorithm, SGBM, and yields useful (i.e. not
bad) depth maps about every other frame. It is also
clear that stereo views from natural scenes perform
better than those from indoor scenes by about 50%.
This could be explained by the more complex textures
in outdoor scenes or perhaps just the better temporal
alignment of stereo views for Outside.
As one of the cameras used to record Mixed has
failed before we could compute rectified stereo, we
had to use non-rectified stereo views. To make sure
the non-rectified stereo did not influence our results,
we also compared HITNet on a random sample of
47 frames from the Outside dataset with rectified ver-
sus non-rectified stereo views. In 29 cases, the non-
rectified version looked better; in 3 cases, the rectified
version looked better and in 15 cases there was no
significant difference, so in effect the rectified stereo
Evaluating Two Ways for Mobile Robot Obstacle Avoidance with Stereo Cameras: Stereo View Algorithms and End-to-End Trained
Disparity-sensitive Networks
669

views performed worse. So we may tentatively con-
clude that the missing rectification is not responsible
for the observed poor performance.
6 DISPARITY-SENSITIVE DEEP
LEARNING NETWORK
(NCC-DISP)
We designed a series of 25 consecutive networks
with different layers and architecture towards the fi-
nal model presented here. The first one was a straight-
forward ten-layer model with alternating Conv2D and
AvgPool2D layers. The basic principles which in our
observation correlate with good performance over this
sequence of networks were:
1. Segmentation: It proved important to process the
slices corresponding to different disparity values
independently and only merge them at the last
layer.
14
2. Dropout: At a higher level of parameters (more
than 500,000) the small dataset led to overfitting.
Adding a dropout layer just before the last layer
proved to resolve this – and also speeded up con-
vergence – in most cases.
3. Alternate Convolutional and Averaging Lay-
ers: Alternating convolutional and averaging lay-
ers worked reasonably well, and removing aver-
aging layers was harmful to performance.
4. Use Appropriate Dimensions: We started out
with a 2D representation using seven channels for
the different disparity values. However this lim-
ited our options for convolutional layers. Switch-
ing to a 3D representation of the same data using
one channel but seven z-layers enabled using the
3D functions of Conv and AvgPool, which imme-
diately improved the performance.
5. Use Activation Relu and MaxPool Layers:
Switching from sigmoid to relu activation and re-
placing AvgPool with MaxPool layers added ad-
ditional nonlinearity which benefitted overall per-
formance.
14
The monkey visual cortex and most likely the human
visual cortex as well actually splits the different modalities
all the way – there is no point where the different levels are
connected directly and summed up – so clearly the brain
uses at least one other method to merge information without
physical connection. One good candidate is clearly neural
assembly synchronization, which does not seem to be avail-
able in Tensorflow yet.
Figure 3: Final disparity-sensitive model NCC-DISP for
R2X and OUT. The K3D model was slightly smaller since
its input was only [62,48,7,1] but was otherwise the same.
The number of layers was limited by the low res-
olution of the input dataset, so we could not in-
crease depth significantly without using kernels of
very small sizes or removing averaging layers, both
of which proved to hamper performance. However
as the final model (see Fig. 3) proved similar in
evaluation set accuracy to the original model (except
for OUT
Train), real-life performance is likely to be
comparable as well.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
670

Table 5: Results of learning experiments
Dataset #Samp. Model #Param.
#Steps to
best model
Corr.
coeff.
Eval.Acc.
Acc. w/
center ±48
Acc. w/
center ±32
K3D Train
15
70,745 DAVE-like 71,867 278.7k 0.4032 59.58% 59.27% 59.08%
K3D Train 70,745 NCC-Disp 179,567 285.0k 0.3531 58.65% 58.17% 57.97%
R2X Train 70,745 DAVE-like 71,867 305.5k 0.3945 59.93% 59.57% 59.05%
R2X Train 70,745 NCC-Disp 186,623 347.7k 0.4088 59.69% 59.03% 58.80%
OUT Train 27,368 DAVE-like 71,867 69.5k 0.1807 58.10% 50.27% 40.87%
OUT Train 27,368 NCC-Disp 186,623 81.8k 0.1349 54.59% 46.01% 39.92%
For training, we used TensorFlow with AdamOp-
timizer and a learning rate of 10
−4
. Training data
was prepared as described in Sec. 4. We computed
normalized correlation coefficient values on regular
8x8 pixel size patches taken from left and right im-
ages at seven different horizontal pixel disparity val-
ues, yielding a 3D image with a z-Depth seven. Note
that due to this transformation no actual image data
is fed into the network, essentially forcing it to use
disparity information only.
For steering outputs, we formulated steering as
a classification problem, representing left, right and
straight forward as distinct classes. Left and right
were determined from a steering output of ±65 which
corresponds to half the maximum steering output of
±127. This variant corresponds to Cl3 of the original
paper Seewald (2020) which was the best-performing
output-model there.
Table 5 shows the results of the different mod-
els DAVE-like (as described in Seewald (2020))
and NCC-Disp (see Fig. 3) on the three datasets
K3D Train, R2X Train and OUT Train. As can be
seen, performance according to evaluation set accu-
racy and correlation between original and estimated
steering is similar between DAVE-like and NCC-Disp
models – except for OUT Train where it is noticably
worse. The number of training steps to the best model
is also rather similar. The number of parameters for
the NCC-Disp models is roughly 2.5 times the origi-
nal DAVE-like model but this has been somewhat off-
set by a dropout layer with 0.8, where 80% of weights
are randomly set to zero in each training step. Disre-
garding the normalized correlation coefficient compu-
tation, the model is still well within the size where it
can be run on RPi 3B+ or higher.
We were surprised by the performance loss on
OUT Train. Initially we assumed that the disparity
levels may need to be adapted for the larger robot
used to collect this dataset, however experiments with
15
After submitting the final paper version for Seewald
(2020), we noticed that by extending the training steps it
was possible to enable good performance for this robot
as well despite the highly distorted field-of-view. We re-
trained, took it to the conference and demonstrated it after
the session, where it performed reasonably well.
two other disparity sets did not improve performance
(data not shown). However, there is one other signifi-
cant difference: The OUT Train dataset was collected
in H264-compressed format while all other datasets
were collected in uncompressed YUV 4:2:2, which
adds an additional layer of noise on the image data.
This could well account for a noisier output from
the NCC preprocessing step and therefore for the ob-
served performance loss.
7 DISCUSSION
One limitation of our approach to represent dispar-
ity is obviously the simplistic normalized correlation
coefficient function to determine patch similarity. It
would be better to use a patch similarity computation
layer as the first layer of the network and optimize
it as a part of the training process. Such a network
could adapt receptive field size and disparity sensitiv-
ity to actually needed values similar as evolution has
done for compound eyes in insects.
One method we have yet not considered is obsta-
cle detection by movement. For a moving robot, sim-
ple video analytics such as optical flow can determine
objects on collision course by looming. However this
method is only applicable once the robot is moving
and cannot be used when the robot is standing still. It
would perhaps be feasible to extend the deep learning
model with recurrent loops to store past frames and
integrate such additional information as well. As our
data has been collected in long sequences it would be
well suited for such learning experiments.
8 CONCLUSION
We have shown that – in the absence of quantitative
data – a qualitative evaluation, despite its inevitable
subjectivity, is helpful in determining the overall use-
fulness of algorithms and models for a specific task.
In our case of stereo view algorithms we obtained a
negative result, however it is clear that deep learning
models are improving at a rapid rate and we may ex-
pect more progress in the future.
Evaluating Two Ways for Mobile Robot Obstacle Avoidance with Stereo Cameras: Stereo View Algorithms and End-to-End Trained
Disparity-sensitive Networks
671

As a second way towards obstacle avoidance with
stereo cameras, we have – after noting that deep learn-
ing algorithms such as Muller et al. (2004) do not rely
on view disparity – proposed the disparity-sensitive
deep learning network NCC-DISP which has only dis-
parity data as input, and show that it performs as well
as an earlier system using raw stereo camera inputs.
The next generation of ToyCollect robots will ad-
ditionally feature an active sensing depth camera to
generate approximate depth maps which would al-
low a qualitative evaluation of stereo camera algo-
rithms. Adding bumper and acceleration sensors will
furthermore allow to automate the generation of large
amounts of obstacle detection training data, which is
currently still a manual process.
ACKNOWLEDGEMENTS
This project was partially funded by the Austrian Re-
search Promotion Agency (FFG) and by the Austrian
Federal Ministry for Transport, Innovation and Tech-
nology (BMVIT) within the Talente internship re-
search program 2014-2019. We would like to thank
Lukas D.-B. for all 3D chassis designs of robot R2X;
Vladimir T. for answering questions and explaining
his model; and all interns which have worked on this
project, notably Georg W., Julian F. and Miriam T.
REFERENCES
Becker, F. and Ebner, M. (2019). Collision detection for
a mobile robot using logistic regression. In Proceed-
ings of the 16th International Conference on Informat-
ics in Control, Automation and Robotics - Volume 2:
ICINCO,, pages 167–173. INSTICC, SciTePress.
Bojarski, M., Del Testa, D., Dworakowski, D., et al. (2016).
End to end learning for self-driving cars. Technical
Report 1604.07316, Cornell University.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza,
D., Neira, J., Reid, I., and Leonard, J. (2016). Past,
present, and future of simultaneous localization and
mapping: Towards the robust-perception age. IEEE
Transactions on Robotics, 32(6):1309–1332.
Hirschmuller, H. (2008). Stereo processing by semiglobal
matching and mutual information. PAMI, 30(2):328–
341.
Kandel, E. R., Schwartz, J. H., Jessell, T. M., of Biochem-
istry, D., Jessell, M. B. T., Siegelbaum, S., and Hud-
speth, A. (2000). Principles of neural science, 4th
Edition. McGraw-Hill New York.
Khan, M. and Parker, G. (2019). Vision based indoor obsta-
cle avoidance using a deep convolutional neural net-
work. In Proceedings of the 11th International Joint
Conference on Computational Intelligence - NCTA,
(IJCCI 2019), pages 403–411. INSTICC, SciTePress.
Kim, J., Kolmogorov, V., and Zabih, R. (2003). Visual cor-
respondence using energy minimization and mutual
information. In ICCV ’03: Proceedings of the Ninth
IEEE International Conference on Computer Vision,
page 1033, Washington, DC, USA. IEEE Computer
Society.
Konolige, K. (1998). Small vision systems: Hardware and
implementation. In Robotics research, pages 203–
212. Springer.
Luo, W., Xiao, Z., Ebel, H., and Eberhard, P. (2019). Stereo
vision-based autonomous target detection and track-
ing on an omnidirectional mobile robot. In Proceed-
ings of the 16th International Conference on Informat-
ics in Control, Automation and Robotics - Volume 2:
ICINCO,, pages 268–275. INSTICC, SciTePress.
Muller, U., Ben, J., Cosatto, E., Fleep, B., and LeCun, Y.
(2004). Autonomous off-road vehicle control using
end-to-end learning. Technical report, DARPA-IPTO,
Arlington, Virginia, USA. ARPA Order Q458, Pro-
gram 3D10, DARPA/CMO Contract #MDA972-03-
C-0111, V1.2, 2004/07/30.
Muller, U., Ben, J., Cosatto, E., Fleep, B., and LeCun, Y.
(2006). Off-road obstacle avoidance through end-to-
end learning. In Advances in neural information pro-
cessing systems, pages 739–746.
Pfeiffer, M., Schaeuble, M., Nieto, J. I., Siegwart, R.,
and Cadena, C. (2016). From perception to de-
cision: A data-driven approach to end-to-end mo-
tion planning for autonomous ground robots. CoRR,
abs/1609.07910.
Seewald, A. K. (2020). Revisiting End-to-end Deep Learn-
ing for Obstacle Avoidance: Replication and Open Is-
sues. In Proceedings of the 12th International Con-
ference on Agents and Artificial Intelligence (ICAART
2020), Valetta, Malta., pages 652–659.
Tankovich, V., Hane, C., Zhang, Y., Kowdle, A., Fanello, S.,
and Bouaziz, S. (2021). Hitnet: Hierarchical iterative
tile refinement network for real-time stereo matching.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 14362–
14372.
Wang, Y., Dongfang, L., Jeon, H., Chu, Z., and Matson, ET.
(2019). End-to-end learning approach for autonomous
driving: A convolutional neural network model. In
Rocha, A., Steels, L., and van den Herik, J., editors,
Proc. of ICAART 2019, volume 2, pages 833–839.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
672
