
A Zero-blockage based Scheduling for Import Containers Pickup
Operations at Container Terminal Yards
Ahmed Azab
a
and Hiroshi Morita
b
Department of Information and Physical Sciences, Graduate School of Information Science and Technology,
Osaka University, Suita, Japan
{ahmed.azab, morita}@ ist.osaka-u.ac.jp
Keywords: Truck Appointment Scheduling, Container Terminals, Stacking Sequence.
Abstract: In container terminals (CTs), containers are stacked above each other due to the limited yard area space used
for storing the containers. External trucks usually submit appointment requests to pick up their import
containers from the CT. However, some containers are not on the top stack and are blocked by other containers
when trucks arrive at the terminal yard. Resolving this blockage requires relocating all containers above the
targeted container. This non-value-added operation reduces the yard crane utilization and increases the service
of external trucks. This paper studies the appointment scheduling for picking up containers, considering the
container stacking sequence in the yard. We propose a scheduling method for container pickup appointments
to avoid container blockages. An IP model is developed to minimize shifting appointment times for picking
up import containers from its preferable pickup time windows. The performance of the developed model is
investigated by solving some numerical instances. In addition, further analyses are performed to study the
effect of container blocking on appointment scheduling.
1 INTRODUCTION
The Global seaborne trade acts as the key player in
the global supply chain. According to the United
Nations Conference on Trade and Development, It
has been reported that about 80% of the global cargo
is transported by sea (UNCTAD 2020). Using
containers in cargo shipping is very cost-efficient
with added supply chain values. Containers are
transported between different parties in the supply
chain, involve manufacturers producing goods for
global use, freight forwarders, shipping lines, transfer
facilities, and finally, customers(Günther and Kim
2006). As essential nodes in the maritime supply
chain, container terminals (CTs) play an
indispensable role in the container's transportation
and cargo handling efficiency.
As a response to the container shipping growth,
container ports always strive to increase their
throughput by investing the infrastructure and
designing more efficient operations. Figure 1 shows
the growth in container terminal throughput at ports
worldwide from 2012 to 2020, with a forecast for
a
https://orcid.org/0000-0002-3169-0943
b
https://orcid.org/0000-0002-1325-8655
2021 until 2024. CTs are faced with increasing
numbers of containers to be handled at a low cost and
in a short time (Stahlbock and Voß 2008). Therefore,
CTs always try to enlarge their handling capacities
and strive to achieve higher productivity without
losing competitiveness.
Figure 1: Container throughput at ports worldwide from
2012 to 2020 with a forecast for 2021 until 2024) (source:
Statista 2021).
286
Azab, A. and Morita, H.
A Zero-blockage based Scheduling for Import Containers Pickup Operations at Container Terminal Yards.
DOI: 10.5220/0010885000003117
In Proceedings of the 11th International Conference on Operations Research and Enterprise Systems (ICORES 2022), pages 286-293
ISBN: 978-989-758-548-7; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Typically
, CTs consist of three main areas:
Landside: In this area, export containers are
received from outside the terminal by external trucks
or trains, and import containers are picked up by the
same transportation means.
Seaside: In this area, export containers are loaded
to vessels to deliver to another CT. In contrast, import
containers are unloaded from vessels to be picked up
by road transportation or another vessel.
Yard Area: containers received from the seaside
and landside are temporarily stored in the yard.
Typically, containers are stacked above each other's
due to limited yard area space and transported
between seaside and yard using internal trucks or
automated guided vehicles. A stack is a vertical
column of containers and several stacks from a two-
dimensional bay configuration, as shown in Figure 2.
Each area inside the container terminal has
operations that interrelate with different processes
inside and outside the terminal. For instance, the
container unloading sequence from the vessels
impacts the container handling and stacking
operations at the yard area. The arrival times of the
external truck at the terminal to deliver or pick up
containers also affect the yard operations. Therefore,
decision-making in this complex system is highly
dependent, so that the integration of operational
planning is essential.
This paper focuses on managing the arrival of the
external trucks at the landside while considering the
container stacking sequence in the yard. At landside,
the external trucks arrive at the terminal at a pre-
decided time window to deliver export and (or pickup
import containers). The decided arrival times are
usually obtained from Truck Appointment System
(TAS). TAS is typically applied in a CT to control the
terminal congestion and smooth the arrival peaks
(Huynh, Smith, and Harder 2016). In addition, it is
widely implemented in many terminals to coordinate
the truck arrival process between trucking companies
and container terminals.
Once the truck's arrival time (appointment time)
is decided, trucking companies dispatch their trucks
to the terminals. At the landside gates, pre-entry
processes are performed, such as scanning the export
container, checking the container customs, and
revising the container and driver-related documents.
Once the gate operations are finished, trucks are
directed to the yard area, where containers are stored
in separate yard blocks. A yard crane is used at a
particular yard block to load the import containers to
the external trucks or unload the export container
from the truck to the container stack (See Figure 2).
If the terminal adopts TAS, the yard crane
stacks/unstacks the containers based on a prepared
plan to achieve the best operational performance
considering containers arrival or departure time, yard
block configuration, and other spatial constraints.
Figure 2: Container Bay Configuration showing the
blockage.
A typical situation in CT occurs when an external
truck is given an appointment to pick up an import
container, but this targeted container is not on the top
of the stack (see Figure 2). In this case, the yard crane
must remove (relocate) all containers above the
targeted container, resulting in more truck waiting
time and extra container movements performed by the
yard crane.
The container Relocation Problem (CRP) is
typically solved to determine the optimum relocation
sequence (de Melo da Silva et al. 2018) and resolve
the container blockage. The truck arrival information
is usually obtained from the TAS and used as an input
to the CRP. The arrival time of each truck will
determine the pickup sequence of the containers from
the yard. The truck appointment scheduling problem
is solved, usually independent from the CRP. In most
cases, TAS is designed to tackle the congestion
problems in CT regardless of some root causes of
congestion inside the terminal and long truck waiting
times. One of the hidden causes of such truck delay
issues is the time consumed for resolving container
blockage when picking up import containers from the
yard.
This paper introduces a scheduling approach for
truck appointments considering the container
blockage in the yard. Unlike the previous studies, we
consider the container stacking sequence in the yard
when deciding final truck appointments to avoid
container blockage during import container pickup
A Zero-blockage based Scheduling for Import Containers Pickup Operations at Container Terminal Yards
287

operations. Considering container stacking sequence
will enable the terminal operators to prevent or
control the blockage and resolve one of the
congestion root causes: container relocations.
The remainder of the paper is organized as
follows; section 2 discusses some related work. In
section 3, the problem description is introduced. The
proposed mathematical model is explained in section
4. Section 5 discusses the numerical experiments and
results. Conclusions and future work are discussed in
section 6.
2 RELATED WORKS
TAS and CRP are extensively studied in the literature.
In this section, some recent studies are presented. In
Zeng, Feng, and Yang ( 2019), the impact of partial
truck arrival information on the number of container
relocations in yard areas is studied. An optimization
model is developed, and five heuristic algorithms are
introduced to solve the model. Results illustrated how
the proposed algorithms could help CT operators to
reduce container rehandling. To minimize the
expected number of container relocations, Ku and
Arthanari (2016) used the departure time windows for
containers revealed by TAS. A stochastic dynamic
programming model is developed, and a heuristic
algorithm is proposed to beat the computational
complexity of the exact method. Yi, Gui, and Kim
(2018) used the real-time arrival information of the
external trucks to improve the carry-out operations of
the import containers. They showed how the expected
arrival time of the trucks obtained by GPS in drivers'
smartphones could help in reducing container
relocation operations.
Truck appointment scheduling is also studied
from the perspective of reducing terminal congestion.
Torkjazi, Huynh, and Shiri (2018) formulated a
mixed-integer nonlinear programming model to
minimize both waiting time and the cost of external
trucks. To study the effect of appointments on truck
waiting times, Yi et al. (2019) developed a
mathematical model and a heuristic algorithm to
solve the problem within a reasonable computational
time. In this context, Azab, Karam, and Eltawil
(2020) also proposed a simulation-based optimization
approach to minimize the truck congestion at terminal
gates and in yard blocks for multiple trucking
companies. Their approach illustrated the benefits of
using TAS in managing truck arrival and reducing
truck turnaround times.
Zhang, Zeng, and Yang (2019) proposed a
mathematical optimization model to minimize the
waiting time of external trucks and internal trucks
used to transport containers inside the terminal. Their
proposed queuing model reduced terminal operating
costs and provided a more accurate estimation of the
truck waiting times. More recently, Abdelmagid,
Gheith, and Eltawil (2020) proposed an IP model to
minimize the external truck delays under several
truck arrival scenarios. Their results showed that the
truck delays could be reduced while considering
service time limitation and yard capacity. For a more
comprehensive survey on TAS, interested readers can
refer to Abdelmagid, Gheith, and Eltawil (2021).
From the surveyed studies in this section and more
studies in the literature, it is noted that considering the
container stacking sequence in scheduling the truck
appointments is still undercovered. Moreover,
studying the import container operations received less
interest than export containers since the latter are
prioritized to reduce the vessel operational time than
trucking companies' operational times. So that, this
paper introduces a preliminary design of the
appointment scheduling system, which considers
container stacking orders from the container terminal
side and the preferable container pickup time from
trucking companies' side.
3 PROBLEM DESCRIPTION
For a truck to access the CT for picking up an import
container, an appointment request shall be submitted
one day before heading to the terminal. The
submitted request represents the preferred arrival
time window for the truck to pick a predefined
container. However, arriving truck at the terminal at
the desired time window can experience a long
service time since other containers may be blocking
the targeted container (
Figure 2). The blocking occurs
when the truck arrives to pick up its targeted container
before the container above it. On the other hand,
terminal operators want to avoid container blockage
as much as possible to increase the yard crane
productivity. The more blocking containers the bay
has, the more container relocations the yard crane will
perform.
Changing the arrival time of trucks such that
trucks with the topmost containers in the bay arrive
before the trucks with the bottom containers can
reduce the blockage scenarios. However, matching
truck appointment times with container stacking
sequence to prevent blocking may shift the trucks
from their preferable arrival time. This paper
proposes a new IP model to minimize shifting the
appointment from the preferable container pickup
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
288

time window while keeping container blockage under
control.
It is worth mentioning that the proposed approach
only considers the static blockage in the initial stack
configuration. The initial stack configuration
describes the stacking order of import containers in
each stack before trucks arrive at the yard. However,
considering the future relocations resulting from this
blockage is not considered, and it requires
considering the change of stack configuration as the
containers pickup is progressing. Minimizing the
number of relocations accordingly with appointment
scheduling is recently considered by Azab and Morita
(2022). The authors developed an IP model that
considered a limited tolerance for container
appointment shift while keeping relocations at a
minimum.
In this paper, the container blockage describes the
number of blocked containers in the initial stack
configuration. For example, in Figure 3, the last
highlighted stack in the initial bay configuration
(right-hand side of the figure) shows that there is a
blocking container if the trucks arrive according to
their preferred times. However, our approach
introduces a pre-processing scheduling method to
schedule the truck appointments to control the
blockage or avoid it when trucks arrive according to
the scheduled times. This can be seen on the left-hand
side of Figure 3. Assuming that attached times to the
containers (highlighted in grey) will be the actual
(newly scheduled) container pickup times. This leads
to fewer blockages in the initial stack configuration.
According to Zhu et al. (2012), the number of
blocking containers in the initial configuration of the
stacks is considered the lower bound for the total
number of containers relocations required to retrieve
all containers from the bay. This lower bound
contributes to determining the maximum number of
relocations or the upper bound (Zehendner et al.
2015). Reducing the number of blocking containers
in the initial stacks' configuration and accordingly
bay configuration can reduce the total number of
container relocations. Let 𝐿𝐵
is the number of
blocking containers (lower bound for container
relocations) at time window 𝑡 . Then the overall
minimum number of container relocations (𝐿𝐵) can
be obtained as follows:
𝐿𝐵 𝐿𝐵
𝐿𝐵
⋯ 𝐿𝐵
𝑇: Latest time window to pick up an import
container from the bay.
Reducing the number of blocking containers in
the initial bay (𝐿𝐵
) can reduce the number of future
relocations, which is our paper's primary motivation.
We make this reduction by scheduling the pickup
time of containers. This can be seen clearly in the
illustrative example in Figure 3. Now you can see
that the last highlighted stack does not contain any
blocking just by changing the pickup time of the
containers one or two time windows.
Figure 3: Illustration of the proposed appointment
scheduling approach and the resultant stack configuration.
In our approach, the planning horizon is
discretized in several time widows; each time window
is assumed to be one-hour length. Each container is
given a unique index corresponding to one truck in
the truck appointment system. Since we don't study
the dynamic version of the problem that deals with
the change of stacks configuration with time, we
solve the optimization problem of truck appointment
scheduling for containers located in each vertical
stack. This adds an advantage to our approach since
we can solve the problem for a large number of stacks
regardless of the location of this stack in the yard.
We also consider the number of trucks that can be
received at the terminal yard during a particular time
window. This is expressed as the yard capacity in the
developed mathematical model. For instance, the
number of appointment requests exceeds the yard
capacity; some trucks will be scheduled to less
congested time windows. In the proposed scheduling
A Zero-blockage based Scheduling for Import Containers Pickup Operations at Container Terminal Yards
289

approach, the number of allowed blockings is
typically assumed to be zero. This means that no
relocations will be required in the future if the trucks
arrive according to the developed schedule. However,
terminal operators shall be aware that avoiding all
blockings might require shifting many trucks away
from their preferred arrival times, leading to less
satisfaction for truckers. Therefore, we further
analyze the impact of the number of acceptable
container blockings on the appointment shifting. In
the next section, we introduce the mathematical
formulation for the described problem in this section.
4 PROBLEM FORMULATION
Indices:
𝑖
Container index.
𝑠
Stack index.
𝑡 Time window index,
𝑡∈
1,..,𝑇
.
Parameters:
𝑝
Preferable container pickup time of container
𝑖 located at stack 𝑠. 𝑝
∈
1,..,𝑇
ℎ
Stack 𝑠 height (number of containers in stack
𝑠).
𝑚
Number of stacks.
𝐶
Yard capacity (truck arrival quota) per time
window.
𝑇
Latest possible container pickup time
window.
k Number of allowable container blockings in
the initial stack confi
g
uration.
Decision Variables:
Integer variables:
𝑥
The pickup time window of the container 𝑖
located at stack 𝑠.
Derived binary variables:
𝑦
A binary variable represents the state of
container i if it has pickup time later than the
container j below it: 𝑗1,…,ℎ
1,𝑖
𝑗1,…,ℎ
. In other words, whether
container 𝑖 is blocking container
𝑗
.
𝑧
A binary variable represents if container 𝑖
will be picked up from the stack 𝑠 at time
window 𝑡.
Objective Function:
𝑀𝑖𝑛
|
𝑥
𝑝
|
(1)
Subjected to:
𝑦
1, 𝑖𝑓 𝑥
𝑥
0, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
,
∀
𝑗
∈
1,…ℎ
1
,𝑖∈
𝑗
1,…,ℎ
(2)
𝑦
𝑘, ∀𝑠∈1,…,𝑚
(3)
𝑧
1, 𝑖𝑓𝑥
𝑡
0, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
,∀𝑡∈1,…,𝑇 (4)
𝑧
𝐶, ∀𝑡∈1,…,𝑇
(5)
0𝑥
𝑇,∀𝑖∈
1,…,ℎ
,
∀𝑠 ∈ 1,…,𝑚
(6)
The objective function (1) is to minimize the total
shift of the final appointments from the preferred
appointments. Constraint (2) defines the derived
binary variable 𝑦
. 𝑦
1, if container 𝑖 is
blocking a container 𝑗 below it. The container
indexing 𝑖 in each stack is ascending from the bottom
to the top (See Figure 4). The model avoids/controls
container blockage by defining the constraint (3).
This constraint specifies the number of allowed
blockings in the initial stack configuration using the
parameter 𝑘. One "blocking" is counted if a container
𝑖 has a later pickup time than a container 𝑗 below it.
Figure 4 shows two illustrative examples of blocking
modeling in constraints (2) and (3). Typically, we use
𝑘 equals 0 and called constraint (3) non-blocking
constraint. The 𝑘 values are further changed to
investigate the effect of increasing the number of
allowed blockings on appointments, as explained in
section 5.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
290

Figure 4: Illustrative examples for the constraints (2) and
(3).
Practically, CTs have limited resources capacity
to accept all appointments and handle containers
demand. Constraint (4) defines the derived binary
variable 𝑧
. The variable 𝑧
is used later in
constraint (5) to determine and restrict the number of
containers picked up during a specific time window
𝑡. For modeling simplicity, constraints (2) and (4) are
formulated in such binary condition form since many
commercial solvers can handle the definition of
binary conditions without the need for "Big M"
notations. In constraint (6), picking up containers are
not allowed after the last working time window in the
terminal. This constraint also defines the discrete
domain of the decision variable 𝑥
. The domain of
the binary decision variables 𝑦
and 𝑧
is
inherently defined in constraints (2) and (4).
5 NUMERICAL EXPERIMENTS
AND RESULTS
A number of 10 randomly generated instances with
different sizes are synthesized to investigate the
performance of the developed model. An instance
size is determined by the number of stacks (𝑚) and
the planning horizon (𝑇). A total number of 525
stacks are solved. Practically, the maximum number
of containers in each stack is 5 or 6, where the yard
crane can move above the stacks freely without
collision. In this paper, we used the maximum height
of the container stack (ℎ
) to be five, and all stacks
are full. All containers are assumed to be picked up in
time windows (𝑝
) between 1 and 𝑇. Finally, the
number of allowable container blockings in the initial
stack configuration is assumed to be zero; constraint
(3) will be
∑∑
𝑦
0, ∀𝑠∈1,…,𝑚.
To solve the generated instances, CPLEX Studio
IDE 12.9.0 is used. Table 1 illustrates the input
parameters of the generated instances and
computational results. The optimal objective values
that determine the total appointment shift (in time
windows) are obtained. The average appointment
shift for each container is also obtained. Results show
that all instances are solved to the optamilty in a
reasonable time; however, the solution time is long
for larger instances. It is noticed that each container
can be shifted from its preferable pickup time by an
average range from 1.4 to 2.5-time window.
Therefore, a truck may face delaying or advancing its
preferred appointment to avoid the container
blockage in the initial stack configuration.
As more illustration, instance (1) solution is
shown in Figure 5. In this instance, Figure 5 (a) shows
the submitted preferable pickup time ( 𝑝
)
corresponding to each container. In Figure 5 (b), the
decided pickup times (𝑥
) obtained by solving the IP
model are shown. It can be noted that in the stack (𝑠
2), the first container on the top of the stack is
preferred to be picked up by truck at time window 5,
and the container below it ( 𝑖2) has an earlier
preferred pick up at time window of 1. As a result, the
topmost container is shifted to be picked up in time
window 1 to avoid blocking the container below it.
Results show that every container in the first instance
will be shifted by 1.8 time windows on average from
its preferable pickup time.
Table 1: Instances and results.
Inst. m T C Optimal Obj.
value
Optimal Obj.
value /stac
k
Avg. shift/container CPU time sec.
1 5 10 4 45 9.0 1.8 0.33
2 10 10 6 93 9.3 1.86 9.51
3 15 10 8 119 7.9 1.58 137.19
4 20 10 12 145 7.25 1.45 55.22
5 25 10 14 183 7.32 1.46 69.06
6 30 10 17 208 6.39 1.39 59.63
7 40 10 22 288 7.2 1.44 151
8 80 16 30 921 11.5 2.3 378.89
9 100 18 32 1,261 12.61 2.5 113.03
10 200 32 40 4,470 22.35 4.47 1,195.39
A Zero-blockage based Scheduling for Import Containers Pickup Operations at Container Terminal Yards
291
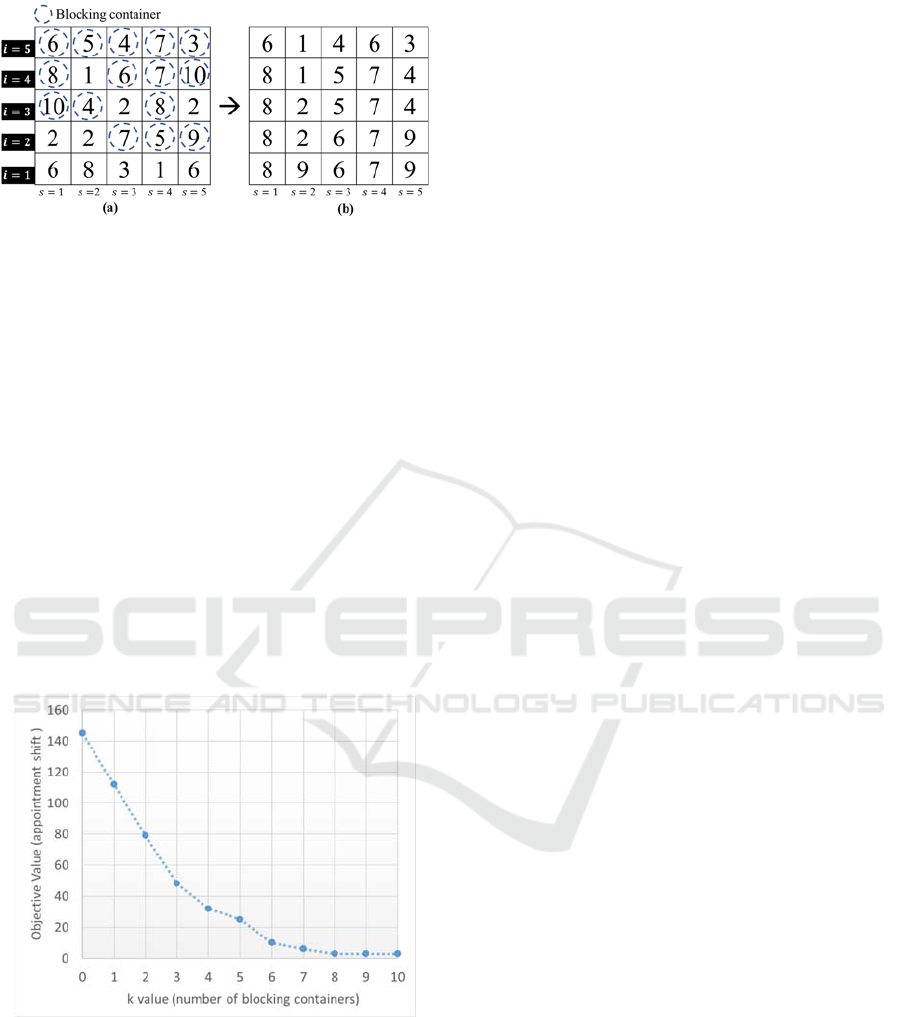
Figure 5: Instance 1 solution (a) stacks configuration with
preferable appointment times (𝑝
), (b) the same stacks
configuration with optimal appointment times (𝑥
).
The number of allowed blockings (𝑘) and their
impact on the objective values are also studied. We
solved instance number 4, with the 20 stacks and
planning horizon of 10 time windows length, under
different k values. Results in Figure 6 show that the
more the number of blockings is allowed, the less the
container will be shifted from their preferable pickup
time. This result is reasonable since the terminal
operator may accept more blocking containers in the
initial configuration of the stack to achieve higher
satisfaction for trucking companies. However, it's
worth mentioning that the non-blocking scenario
guarantees less service time for external trucks since
fewer non-value-added container relocations will be
avoided and hence higher productivity for yard
cranes.
Figure 6: Effect of parameter 𝑘 on objective values.
5 CONCLUSIONS AND FUTURE
WORK
This paper proposes a preliminary design for an
appointment scheduling system for picking up import
containers by external trucks in CTs considering
containers stacking sequence. Results showed that the
non-blocking could be achieved while minimizing the
appointment shifting from the desired pickup time
windows. The developed IP model also considers the
terminal capacity and appointment at the latest
available time.
This work will be extended in the future by
integrating truck appointment scheduling problems
with container relocation problems (TAS-CRP). The
primary motivation behind the integration is that most
TASs are designed to alleviate the terminal
congestion without considering the number of
relocations that may confront the container retrieval
process. Since the container stacking sequence is
almost well known at the time of appointment
submission, considering the number of relocations
and terminal congestion issues is expected to improve
the solution of both problems. The main goal is to
match truck arrival times with container stacking
sequence to minimize relocations, not only the
blocking containers in the static stacks
configurations, and maximize trucking companies'
satisfaction.
However, some issues may arise due to
integrating TAS with CRP, such as the problem of
hardness. CRP alone has been proven to be an NP-
hard problem. In this case, exact or heuristic
algorithms may be developed to solve the integrated
problem. Another issue is the uncertainty of truck
arrival times and container stacking sequence.
Considering the number of relocations and preferable
truck arrival times may not guarantee the system's
efficiency. As a result, a real-time recovery system to
recover the distrusted plans supported by reliable
response strategies might be interesting to study.
REFERENCES
Abdelmagid, Ahmed M., Mohamed S. Gheith, and Amr B.
Eltawil. 2020. “Notice of Removal: A Binary Integer
Programming Formulation and Solution for Truck
Appointment Scheduling and Reducing Truck
Turnaround Time in Container Terminals.” Pp. 149–53
in 2020 IEEE 7th International Conference on
Industrial Engineering and Applications (ICIEA).
Abdelmagid, Ahmed Mohssen, Mohamed Samir Gheith,
and Amr Bahgat Eltawil. 2021. “A Comprehensive
Review of the Truck Appointment Scheduling Models
and Directions for Future Research.” Transport
Reviews 0(0):1–25.
Azab, Ahmed, Ahmed Karam, and Amr Eltawil. 2020. “A
Simulation-Based Optimization Approach for External
Trucks Appointment Scheduling in Container
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
292

Terminals.” International Journal of Modelling and
Simulation 40(5):321–38.
Azab, Ahmed and Hiroshi Morita. 2022. “The Block
Relocation Problem with Appointment Scheduling.”
European Journal of Operational Research 297(2):680–
94.
Günther, Hans-Otto and Kap-Hwan Kim. 2006. “Container
Terminals and Terminal Operations.” OR Spectrum
28(4):437–45.
Huynh, Nathan, Daniel Smith, and Frank Harder. 2016.
“Truck Appointment Systems: Where We Are and
Where to Go from Here.” Transportation Research
Record 2548(1):1–9.
Ku, Dusan and Tiru S. Arthanari. 2016. “Container
Relocation Problem with Time Windows for Container
Departure.” European Journal of Operational Research
252(3):1031–39.
de Melo da Silva, Marcos, Güneş Erdoğan, Maria Battarra,
and Vitaly Strusevich. 2018. “The Block Retrieval
Problem.” European Journal of Operational Research
265(3):931–50.
Stahlbock, Robert and Stefan Voß. 2008. “Operations
Research at Container Terminals: A Literature Update.”
OR Spectrum 30(1):1–52.
Torkjazi, Mohammad, Nathan Huynh, and Samaneh Shiri.
2018. “Truck Appointment Systems Considering
Impact to Drayage Truck Tours.” Transportation
Research Part E: Logistics and Transportation Review
116:208–28.
UNCTAD. 2020. “Shipping in Times of the Covid-19
Pandemic.”
Yi, Sanghyuk, Lin Gui, and Kap Hwan Kim. 2018.
“Improving Carry-Out Operations of Inbound
Containers Using Real-Time Information on Truck
Arrival Times.” Pp. 457–63 in Advances in Production
Management Systems. Production Management for
Data-Driven, Intelligent, Collaborative, and
Sustainable Manufacturing, edited by I. Moon, G. M.
Lee, J. Park, D. Kiritsis, and G. von Cieminski. Cham:
Springer International Publishing.
Yi, Sanghyuk, Bernd Scholz-Reiter, Taehoon Kim, and
Kap Hwan Kim. 2019. “Scheduling Appointments for
Container Truck Arrivals Considering Their Effects on
Congestion.” Flexible Services and Manufacturing
Journal 31(3):730–62.
Zehendner, Elisabeth, Marco Caserta, Dominique Feillet,
Silvia Schwarze, and Stefan Voß. 2015. “An Improved
Mathematical Formulation for the Blocks Relocation
Problem.” European Journal of Operational Research
245(2):415–22.
Zeng, Qingcheng, Yuanjun Feng, and Zhongzhen Yang.
2019. “Integrated Optimization of Pickup Sequence and
Container Rehandling Based on Partial Truck Arrival
Information.” Computers & Industrial Engineering
127:366–82.
Zhang, Xiaoju, Qingcheng Zeng, and Zhongzhen Yang.
2019. “Optimization of Truck Appointments in
Container Terminals.” Maritime Economics &
Logistics 21(1):125–45.
Zhu, Wenbin, Hu Qin, Andrew Lim, and Huidong Zhang.
2012. “Iterative Deepening A* Algorithms for the
Container Relocation Problem.” IEEE Transactions on
Automation Science and Engineering 9(4):710–22.
A Zero-blockage based Scheduling for Import Containers Pickup Operations at Container Terminal Yards
293
