
Three-step Approach for Localization, Instance Segmentation and
Multi-facet Classification of Individual Logs in Wooden Piles
Christoph Praschl
1 a
and Gerald Adam Zwettler
1,2 b
1
Research Group Advanced Information Systems and Technology (AIST), University of Applied Sciences Upper Austria,
Softwarepark 11, 4232 Hagenberg, Austria
2
Department of Software Engineering, School of Informatics, Communications and Media,
University of Applied Sciences Upper Austria, Softwarepark 11, 4232 Hagenberg, Austria
Keywords:
Instance Localization, Segmentation, Classification, Wooden Piles, Logs, Cross Faces, Deep Learning, Neural
Networks.
Abstract:
The inspection of products and the assessment of quality is connected with high costs and time effort in
many industrial domains. This also applies to the forestry industry. Utilizing state-of-the-art deep learning
models allows the analysis automation of wooden piles in a vision-based manner. In this work a three-step
approach is presented for the localization, segmentation and multi-facet classification of individual logs based
on a client/server architecture allowing to determine the quality, volume and like this the value of a wooden
pile based on a smartphone application. Using multiple YOLOv4 and U-NET models leads to a client-side
log localization accuracy of 82.9% with low storage requirements of 23 MB and a server-side log detection
accuracy of 94.1%, together with a log type classification accuracy of 95% and 96% according to the quality
assessment of spruce logs. In addition, the trained segmentation model reaches an accuracy of 89%.
1 INTRODUCTION
With the recent improvements in computer vision due
to availability of good deep learning paradigms, ma-
chine learning frameworks and improved GPU hard-
ware, the automated vision-based measurement be-
comes feasible in many industrial areas such as the
printing industry (Villalba-Diez et al., 2019), the food
industry (Kakani et al., 2020), the construction in-
dustry (Xu et al., 2020) or the steel production in-
dustry (Chen et al., 2020) among many others. This
development is also one of the fundamentals in au-
tonomous driving (Janai et al., 2020). However, in
forestry industry, for the domain of wood pile trad-
ing, key aspects for the price such as cross-sections of
the logs, quality and type of the wood are still mostly
manually assessed. As this is a very time-consuming
process, digitization is a key factor in cost reduction.
With a smartphone app, the log front faces can be au-
tomatically detected and segmented, besides precisely
assessing wood type and quality in an objective and
reproducible way, resulting in the possibility for de-
termining a first price estimation of the felled trees.
a
https://orcid.org/0000-0002-9711-4818
b
https://orcid.org/0000-0002-4966-6853
1.1 Research Questions and Approach
In this research paper we therefore introduce a
client/server based localization and instance segmen-
tation, as well as classification approach allowing live
application in the woods with subsequent server-side
refinement of the results. Besides it is analyzed, if
splitting into localization and segmentation allows to
achieve a higher level of accuracy overall.
2 RELATED WORK
Multiple publications are available in the context of
the individual, proposed pipeline steps for the ana-
lyzation of wooden piles using localization, segmen-
tation or classification approaches. Regarding the lo-
calization of individual logs in wooden piles Gutzeit
and Voskamp (Gutzeit and Voskamp, 2012) as well as
Auersperg-Castell (Auersperg-Castell, 2018) are able
to identify instances using Haar Cascade classifica-
tions. Multiple authors (Chiryshev and Atamanova,
2016; Knyaz et al., 2004; Kruglov, 2016) use ge-
ometric form based approaches by detecting circles
or ellipses to detect logs in wooden piles. In con-
Praschl, C. and Zwettler, G.
Three-step Approach for Localization, Instance Segmentation and Multi-facet Classification of Individual Logs in Wooden Piles.
DOI: 10.5220/0010892100003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 683-688
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
683
trast to the previous mentioned publications, Her-
bon et al. (Herbon et al., 2014) combine local binary
patterns, together with histograms of oriented gradi-
ents (HOG) for detecting individual logs in a wooden
pile. Based on the localized logs, the authors use
the watershed algorithm based on a Gaussian mix-
ture model to segment the logs. Chiryshev and Ata-
manova (Chiryshev and Atamanova, 2016) continue
the idea of using HOG features and combine this ap-
proach with the Random Forest learning method.
In the context of segmenting an individual log,
classic approaches such as the watershed algorithm
as proposed by Herbon et al. (Herbon et al., 2014)
or similarity based methods as described by Schraml
and Uhl (Schraml and Uhl, 2014) are used. In con-
trast to that, Decelle and Jalilian (Decelle and Jalilian,
2020) juxtapose multiple neural network architectures
to separate the image foreground (log) from the back-
ground based on images of wooden cross-sections.
Like in the present work, the authors use among oth-
ers an U-NET architecture for the separation of the
logs’ cut face from the remaining background with a
comparable accuracy of 92% based on a non-public
image dataset of 2381 wooden logs.
According to the last remaining step of the pro-
posed pipeline, in the context of the classification
of the wood type and quality, recent approaches
have been published. Kryl et al. (Kryl et al., 2020)
compare different methodologies in this area us-
ing classic computer vision methods such as gray
level covariance matrices or k-nearest neighbor, but
also more advanced methodologies using deep learn-
ing. This review, shows that previous publica-
tions differ from the present approach by carry-
ing out the classification using images of the tree’s
bark (Carpentier et al., 2018; Fiel and Sablatnig,
2010), using cut out wooden boards instead of the
raw cross-sections (Shustrov, 2018), based on macro-
scopic images of the wood (Khalid et al., 2008; Tou
et al., 2009; Tou et al., 2007; Paula Filho et al., 2014;
Paula Filho et al., 2010; Gunawan et al., 2018; Seng
and Guniawan, 2018; Yusof et al., 2013; Yadav et al.,
2013; Nasirzadeh et al., 2010; Urbonas et al., 2019)
or utilizing infrared (Cao et al., 2017) and even x-ray
images (Mu et al., 2008) instead of RGB images of
the log’s cross section.
To the best of the authors’ knowledge, none of
the related works have proposed such a client/server
based architecture using deep learning approaches in
the context of individual log cross-sections of wooden
piles for localizing, segmenting and tree type as well
as quality classification and for this reason differ from
the present approach.
Log
Spruce Fir
Douglas
fir
Pine Larch
AC BR CX K
Pile group 1
Pile group 2
Quality
Type
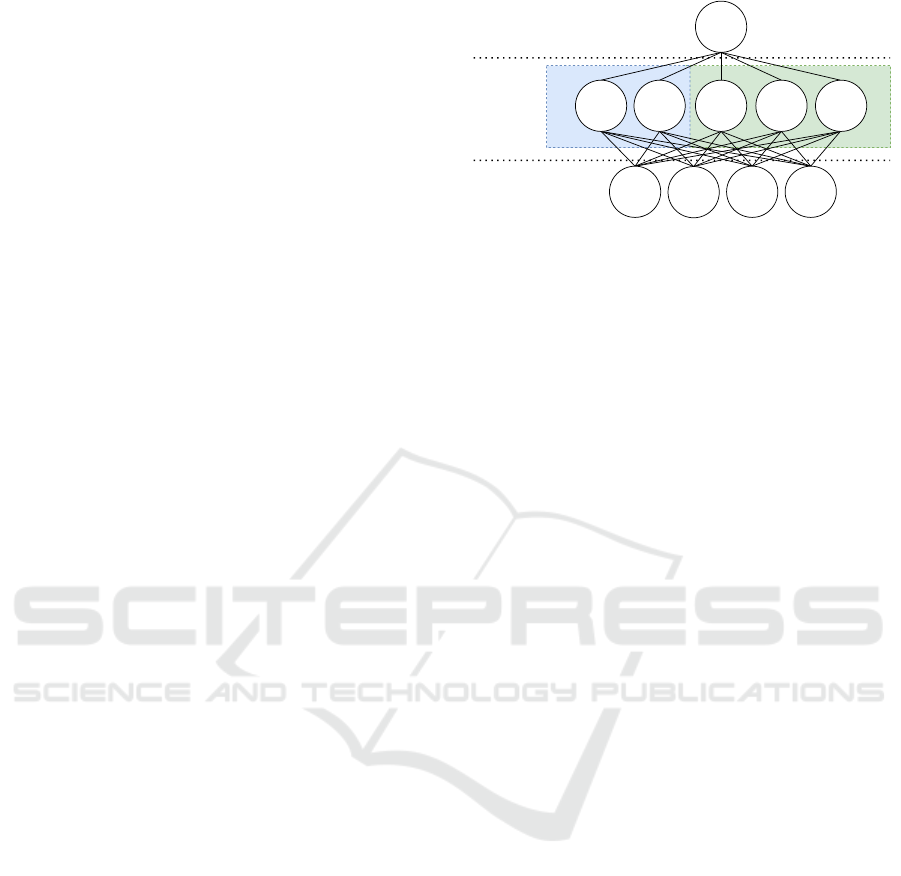
Wooden Pile
Figure 1: Ontology for the classification of logs of a wooden
pile with two levels: (1) the type of tree and (2) the qual-
ity. The types of trees are grouped according to their occur-
rences in the Austrian forestry landscape.
3 ONTOLOGY
In the Austrian wood market, two kinds of wooden
piles are typical for construction work or product
packaging, such ones with spruces and firs, and the
second group with douglas firs, pines and larchs, as
shown in Figure 1. Next to the actual tree type, a log
can be classified to its quality based on e.g. cracks or
color differences, but always in association with the
type of tree. This separate consideration is necessary,
because of the situation, that for example a red discol-
oration of a log may be a bad indicator for most types
of trees but is a typical feature of douglas fir logs. For
this reason, we have decided to create a classification
system based on the wood classes used in Austrian
sawmills. We have reduced the original number of
classes, which e.g. differs between logs of quality A
to C, to the following four final classes based on the
associated price segment:
• AC: These are the best qualities A through C with
no or only few flaws and are usually paid the same
price, so they are combined into one class.
• BR: This quality class contains logs of minor
quality with partially rooten spots mostly due to
fungus and for this generate lower revenues.
• CX: The class of CX contains logs of minor qual-
ity with cracks or irregular shape that are crooked
or knotty. This class can be only partially classi-
fied from a photograph of the cutting area, since
the crucial features can also occur along the whole
remaining log.
• K: The last class contains wood that is infested
by bark beetle and for this has a blue/gray shade
at the rim on the cutting surface. However, the
infestation has not progressed that far to impair
the structural quality and is for this still sellable.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
684

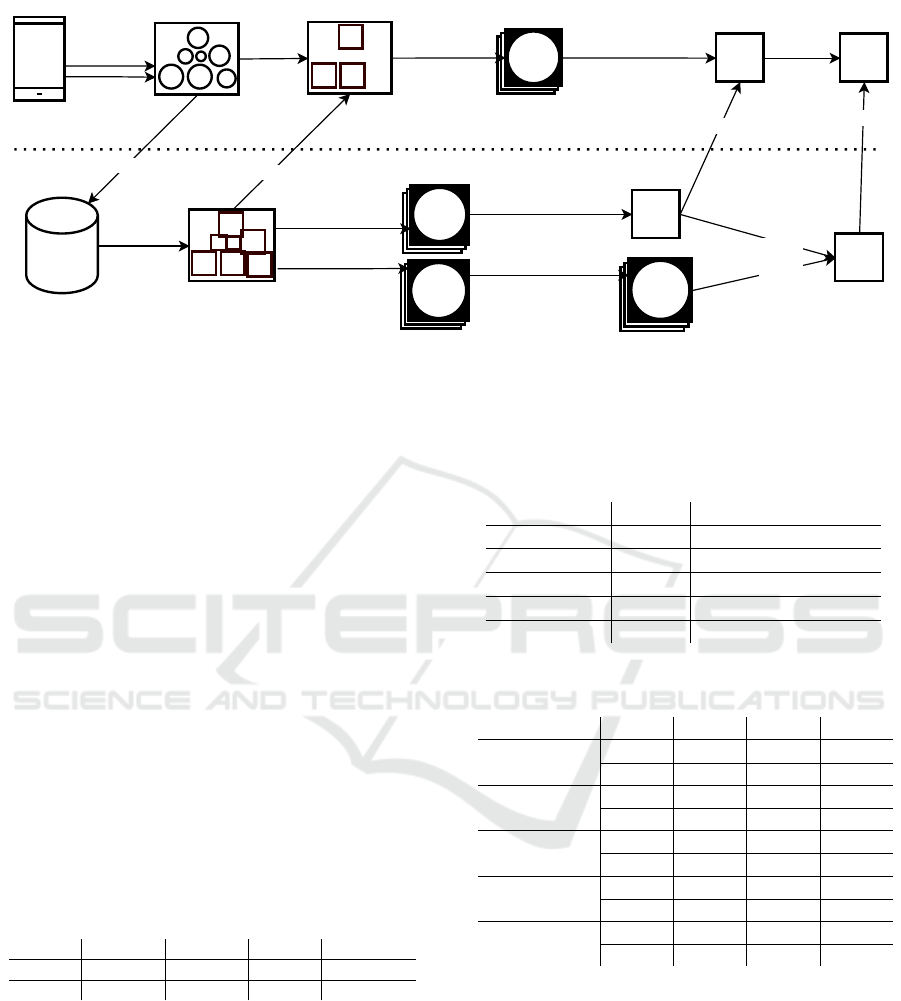
4 METHODOLOGY
Based on the proposed ontology, a process is sug-
gested as shown in Figure 2, that is designed for
foresters and forest owners, who are interested in the
value of wooden piles. Due to the situation that a net-
work connection may not be available on the site of
a forest, the process is based on a separated architec-
ture using a client, as well as a server application. To
do so, two pipelines are considered, with one local
pipeline for a first assessment that happens on e.g. a
smartphone or tablet, and a complementary pipeline
on an external server for a more accurate result. The
idea of the local pipeline is to have a very slim and fast
method to get a first estimation of the number of logs
in a pile, the volume of the logs and a rough estima-
tion of the pile’s value. These first results are further
refined on the server. Consequently, a two step in-
put process is used. First, the user takes an image of
the wooden pile, which is distorted according to the
camera model and additional sensor data as tilt and
orientation. Second, the user is asked for meta infor-
mation: (I) the distance to the pile of the image, (II)
the forest type (hardwood, softwood) as well as (III)
the pile’s length, which is defined by the harvester or
lumberjack.
4.1 Client Pipeline
In a first step of the local pipeline, a tiny
YOLO (Wang et al., 2020) model is used to detect
the logs in the image. Based on the resulting num-
ber i ∈ N of bounding boxes the Grab Cut algorithm
is utilized to segment the actual logs from the clipped
bounding boxes. The resulting mask images I
i
contain
0 for background, and 1 for foreground pixels respec-
tively. The mask images with a width w and a height
h are used in a next step to estimate the logs’ trunk ar-
eas a
i
as shown in Equation 1. The areas a
i
are in turn
a
i
=
w−1
∑
x=0
h−1
∑
y=0
I
i
(x,y) (1)
used together with the user inputs, the pile’s length p
and a pixel to mm conversion factor d to approximate
the log volume v
i
as shown in Equation 2. The con-
version factor d can be determined by the size ratio
of one sample log i in px o
px
i
and mm o
mm
i
as shown
in Equation 4. To do so, the log’s size in mm can be
calculated via the image’s metadata and the user input
using the distance to the log d
mm
, the sensor height s
h
,
the image height h and the focal length f l as shown in
Equation 3. Using the determined volume and a for-
est type specific volume price price
f t
, the pipeline is
able to estimate a first rough value v
pile
for the given
pile as shown in Equation 5, where logs is the number
of logs in the current pile as detected by the YOLO
model.
v
i
= a
i
· p · d (2)
o
mm
i
=
d
mm
∗ o
px
i
∗ s
h
h ∗ f l
(3)
d = o
mm
i
/o
px
i
(4)
v
pile
=
logs
∑
i=1
v
i
· price
f t
(5)
4.2 Server Pipeline
The server-side pipeline basically pursues the same
goal as the local one, calculating the value of a
photographed pile and for this task uses the same
input. In difference to the local pipeline, not a tiny
YOLO model, but a classic YOLO model is used to
detect the logs. The reason for this design decision
is that the tiny YOLO model is faster than the classic
model and has lower storage requirements, while
the classic model leads to a better accuracy. These
characteristics make it possible to realize a small
and fast local version for a first user preview. In the
second step of the server-side pipeline, two tasks
are executed in parallel based on the detected log
bounding boxes of the classic YOLO. On the one
hand an U-Net model is used to segment the indi-
vidual logs in a more accurate way compared to the
Grab Cut method of the client side, and on the other
hand a log classification process is executed. Based
on the U-Net result, the pile’s volume is calculated
identically to the local process. The classification is
in turn done in two successive steps (I) the tree type
classification and (II) the log quality classification.
The reason for this separated classification process is
attributed to the ontology shown in Figure 1, since
the quality classes are basically the same for every
log, but the features (e.g. color) that determine the
actual quality are dependent of the type of tree.
Using the classification results, a type specific price
t
i
and a quality depended factor q
i
in combination
with the volume of the associated log, the value of
the pile can be calculated as shown in Equation 6.
v
pile
=
logs
∑
i=1
v
i
· q
i
· price
t
i
(6)
Three-step Approach for Localization, Instance Segmentation and Multi-facet Classification of Individual Logs in Wooden Piles
685
take
image
tiny
YOLO
local-
ization
to server
volume
approx-
imation
m³
YOLO
local-
ization
update
pile image + meta info bounding boxes binary masks
bounding
boxes
client
server
binary masks
tree type classes log quality classes
volume
approximation
update
m³
update
€
value
approx-
imation
value
approx-
imation
€
volume value
volume
value
additional
user
input
Grab Cut
segmen-
tation
(per log)
spruce
spruce
(AC)
U-NET
segmentation
(per Log)
tree type
classification
via YOLO
(per log)
log quality
classification
via YOLO
(per log)
Figure 2: The overall process of determining the value of a wooden pile based on the volume and optional the class of
individual logs, consisting of a client-side for a first user preview and the server-side for a more accurate calculation.
5 MATERIAL
To the best of the authors’ knowledge, there is nei-
ther a wooden pile nor a log data set publicly avail-
able, that is suitable for the evaluation of the proposed
methodologies. There was the HAWKwood database,
which is not available anymore (Herbon, 2014). For
this reason, a data set of 440 pile images from the
project partners’ archives is created with a resolution
between 640 × 480 pixels and 4032 × 3024 pixels.
The images are distributed according to the seasons,
with 42 images in spring, 125 in summer, 97 in au-
tumn, 133 in winter and 43 remaining images, which
cannot be associated with the recording time, because
of a missing timestamp. This distribution is shown
in Table 1 and leads to different visual conditions of
the logs related with the seasonal weather events, like
moist wood or partially snow or mud covered logs.
Table 1: The distribution of the data set according to the
seasons.
Spring Summer Autumn Winter Unknown
42 125 97 133 43
9.5% 28.4% 22% 30.2% 9.8%
The data set is manually labelled with bounding
boxes, classes and binary masks of the individual
logs. The pile images contain in total 18521 and on
average 42 individual logs, with a minimum amount
of 1 log, a maximal amount of 395 logs and a stan-
dard deviation of 63.95. Currently, 2243 spruces, 15
firs, 346 douglas firs, 75 pines and 1135 larchs are
manually classified, as shown in Table 2. These logs
are mostly also classified according to their quality, as
listed in Table 3. In addition to that, cross-sections are
segmented for 166 individual logs.
Table 2: The distribution of manually classified logs and
their types relative to the 18521 source logs.
Type of Tree # Logs Relative Distribution
Spruce 2243 12.1%
Fir 15 0.1%
Douglas Fir 346 1.9%
Pine 75 0.4%
Larch 1135 6.1%
Table 3: The distribution of the log quality per type based
on the manually classified logs shown in Table 2.
Type of Tree AC BR CX K
Spruce 1464 214 13 543
65.3% 9.5% 0.6% 24.2%
Fir 11 0 4 0
73.3% 0% 26.7% 0%
Douglas Fir 270 55 2 18
78% 15.9% 0.6% 5.2%
Pine 74 1 0 0
98.7% 1.3% 0% 0%
Larch 886 76 35 52
78.1% 6.7% 3.1% 4.6%
6 PRELIMINARY RESULTS
The following preliminary results are based on a sub-
set of the mentioned dataset, that was not considered
for the training of the proposed models. This subset
is used, because of the situation that no comparable
dataset is publicly available to our knowledge. Using
a tiny, scaled YOLOv4 (Wang et al., 2020) model on
the client-side results in a real-time capable log de-
tection accuracy of 82.9% with 23 MB storage usage
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
686

Figure 3: Sample of a wooden pile highlighting the results
for a single log with (a) its localization, (b) its segmentation
and (c) its tree type as well as (d) its quality classification,
together with the detection confidences.
only. On the server, a classic, scaled YOLOv4 model
results in an accuracy of 94.1% with storage require-
ments of 250 MB (Praschl et al., 2021). Using the
resulting bounding boxes, an U-NET (Ronneberger
et al., 2015) model for the segmentation and multi-
ple YOLOv4 classification models are used in paral-
lel. A detailed evaluation of these networks is still
pending, but first results (compare Figure 3) show a
mean average precision of 95% for the type model,
96% for a spruce quality model and 89% for the seg-
mentation model. The quality model shows storage
requirements of 250 MB and the segmentation model
330 MB.
7 CONCLUSION AND OUTLOOK
The preliminary results show that state-of-the-art
computer vision algorithms for localization, segmen-
tation and classification can be combined to a mul-
tiprocess analysis approach for wooden piles and for
this push the digitization of the forestry industry. The
separation of the problem into localization with sub-
sequent segmentation / classification allows to boost
the overall quality of results and further facilitates
a client / server infrastructure where preview results
can be provided on common smartphones in real-time
while further analysis and higher accuracy are asyn-
chronously performed on a server. Especially, the
consideration of the proposed ontology, allows im-
proving the classification accuracy and makes the pro-
cess more robust. In future the extension of the train-
ing data set, especially with logs of underrepresented
wood and quality types, as well as evaluations of clas-
sification and segmentation models are planned.
ACKNOWLEDGEMENTS
Our thanks to the province of Upper Austria
for facilitating the project Woodmaster+ with the
easy2innovate funding program.
The authors thank Philipp Auersperg-Castell and
Brigitte Forster-Heinlein for their contributions to the
research, as well as Ulrich and Luis Hainberger for
providing the labeled test data set and for the valuable
input.
REFERENCES
Auersperg-Castell, P. (2018). Photooptische holzpolterver-
messung mittels haar-kaskaden. Bachelor’s thesis,
University of Passau, Germany.
Cao, J., Liang, H., Lin, X., Tu, W., and Zhang, Y. (2017).
Potential of near-infrared spectroscopy to detect de-
fects on the surface of solid wood boards. BioRe-
sources, 12(1):19–28.
Carpentier, M., Giguere, P., and Gaudreault, J. (2018). Tree
species identification from bark images using convo-
lutional neural networks. In 2018 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 1075–1081. IEEE.
Chen, W., Chen, S., Guo, H., and Ni, X. (2020). Weld-
ing flame detection based on color recognition and
progressive probabilistic hough transform. Concur-
rency and Computation: Practice and Experience,
32(19):e5815.
Chiryshev, Y. V. and Atamanova, A. S. (2016). Automatic
wood log detection based on random decision forests
learning algorithm and histogram of oriented gradi-
ents. In Proceedings of the 3rd International Young
Scientists Conference on Information Technologies,
Telecommunications and Control Systems, pages 7–
12.
Decelle, R. and Jalilian, E. (2020). Neural networks for
cross-section segmentation in raw images of log ends.
In 2020 IEEE 4th International Conference on Image
Processing, Applications and Systems (IPAS), pages
131–137.
Fiel, S. and Sablatnig, R. (2010). Automated identification
of tree species from images of the bark, leaves or nee-
dles. na.
Gunawan, P., Prakasa, E., Sugiarto, B., Wardoyo, R.,
Rianto, Y., Damayanti, R., Dewi, L. M., et al.
(2018). Wood identification on microscopic image
with daubechies wavelet method and local binary pat-
tern. In 2018 International Conference on Computer,
Control, Informatics and its Applications (IC3INA),
pages 23–27. IEEE.
Gutzeit, E. and Voskamp, J. (2012). Automatic segmenta-
tion of wood logs by combining detection and seg-
mentation. In Bebis, G., Boyle, R., Parvin, B.,
Koracin, D., Fowlkes, C., Wang, S., Choi, M.-H.,
Mantler, S., Schulze, J., Acevedo, D., Mueller, K., and
Papka, M., editors, Advances in Visual Computing,
Three-step Approach for Localization, Instance Segmentation and Multi-facet Classification of Individual Logs in Wooden Piles
687

pages 252–261, Berlin, Heidelberg. Springer Berlin
Heidelberg.
Herbon, C. (2014). The hawkwood database. arXiv preprint
arXiv:1410.4393.
Herbon, C., T
¨
onnies, K., and Stock, B. (2014). Detection
and segmentation of clustered objects by using itera-
tive classification, segmentation, and gaussian mixture
models and application to wood log detection. In Ger-
man Conference on Pattern Recognition, pages 354–
364. Springer.
Janai, J., G
¨
uney, F., Behl, A., Geiger, A., et al. (2020).
Computer vision for autonomous vehicles: Prob-
lems, datasets and state of the art. Foundations and
Trends
R
in Computer Graphics and Vision, 12(1–
3):1–308.
Kakani, V., Nguyen, V. H., Kumar, B. P., Kim, H., and Pa-
supuleti, V. R. (2020). A critical review on computer
vision and artificial intelligence in food industry. Jour-
nal of Agriculture and Food Research, 2:100033.
Khalid, M., Lee, E. L. Y., Yusof, R., and Nadaraj, M.
(2008). Design of an intelligent wood species recogni-
tion system. International Journal of Simulation Sys-
tem, Science and Technology, 9(3):9–19.
Knyaz, V., Visilter, Y., and Zheltov, S. (2004). Photogram-
metric techniques for measurements in woodworking
industry. International Archives of the Photogramme-
try, Remote Sensing and Spatial Information Sciences
Proceedings, V. XXXIII. Part B5/2, pages 42–47.
Kruglov, A. V. (2016). Development of the rounded objects
automatic detection method for the log deck volume
measurement. In First International Workshop on Pat-
tern Recognition, volume 10011, page 1001104. Inter-
national Society for Optics and Photonics.
Kryl, M., Danys, L., Jaros, R., Martinek, R., Kodytek, P.,
and Bilik, P. (2020). Wood recognition and quality
imaging inspection systems. Journal of Sensors, 2020.
Mu, H., Qi, D., Zhang, M., and Yu, L. (2008). Image edge
detection of wood defects based on multi-fractal anal-
ysis. In 2008 IEEE International Conference on Au-
tomation and Logistics, pages 1232–1237. IEEE.
Nasirzadeh, M., Khazael, A. A., and bin Khalid, M. (2010).
Woods recognition system based on local binary pat-
tern. In 2010 2nd International Conference on Com-
putational Intelligence, Communication Systems and
Networks, pages 308–313. IEEE.
Paula Filho, P., Oliveira, L. S., Britto, A. d. S., and
Sabourin, R. (2010). Forest species recognition using
color-based features. In 2010 20th International Con-
ference on Pattern Recognition, pages 4178–4181.
IEEE.
Paula Filho, P. L., Oliveira, L. S., Nisgoski, S., and Britto,
A. S. (2014). Forest species recognition using macro-
scopic images. Machine Vision and Applications,
25(4):1019–1031.
Praschl, C., Auersperg-Castell, P., Brigitte, F.-H., and Zwet-
tler, G. A. (2021). Multi-resolution localization of in-
dividual logs in wooden piles utilizing yolo with tiling
on client/server architectures. Proceedings of 33rd
European Modeling & Simulation Symposium.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation.
Schraml, R. and Uhl, A. (2014). Similarity based cross-
section segmentation in rough log end images. In
Iliadis, L., Maglogiannis, I., and Papadopoulos, H.,
editors, Artificial Intelligence Applications and Inno-
vations, pages 614–623, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Seng, L. K. and Guniawan, T. (2018). An experimental
study on the use of visual texture for wood identifica-
tion using a novel convolutional neural network layer.
In 2018 8th IEEE International Conference on Con-
trol System, Computing and Engineering (ICCSCE),
pages 156–159. IEEE.
Shustrov, D. (2018). Species identification of wooden ma-
terial using convolutional neural networks. Master’s
thesis, Lappeenranta University of Technology School
of Engineering Science.
Tou, J. Y., Lau, P. Y., and Tay, Y. H. (2007). Computer
vision-based wood recognition system. In Proceed-
ings of International workshop on advanced image
technology, pages 197–202. Citeseer.
Tou, J. Y., Tay, Y. H., and Lau, P. Y. (2009). Ro-
tational invariant wood species recognition through
wood species verification. In 2009 First Asian Con-
ference on Intelligent Information and Database Sys-
tems, pages 115–120. IEEE.
Urbonas, A., Raudonis, V., Maskeli
¯
unas, R., and
Dama
ˇ
sevi
ˇ
cius, R. (2019). Automated identification of
wood veneer surface defects using faster region-based
convolutional neural network with data augmentation
and transfer learning. Applied Sciences, 9(22):4898.
Villalba-Diez, J., Schmidt, D., Gevers, R., Ordieres-Mer,
J., Buchwitz, M., and Wellbrock, W. (2019). Deep
learning for industrial computer vision quality control
in the printing industry 4.0. Sensors, 19(18).
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2020).
Scaled-yolov4: Scaling cross stage partial network.
arXiv preprint arXiv:2011.08036.
Xu, S., Wang, J., Shou, W., Ngo, T., Sadick, A.-M., and
Wang, X. (2020). Computer vision techniques in con-
struction: a critical review. Archives of Computational
Methods in Engineering, pages 1–15.
Yadav, A. R., Dewal, M., Anand, R., and Gupta, S. (2013).
Classification of hardwood species using ann clas-
sifier. In 2013 fourth national conference on com-
puter vision, pattern recognition, image processing
and graphics (NCVPRIPG), pages 1–5. IEEE.
Yusof, R., Khalid, M., and M. Khairuddin, A. S. (2013).
Application of kernel-genetic algorithm as nonlinear
feature selection in tropical wood species recognition
system. Computers and Electronics in Agriculture,
93:68–77.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
688
